Изобретение относится к контрольно-измерительной технике и может быть использовано для непрерывного неразрушающего контроля, оценки и прогнозирования технического состояния конструкций корпуса судна в период эксплуатации.
Проблему повышения технической безопасности и устойчивости функционирования судовых корпусных конструкций решают различными способами.
Известен способ дистанционного контроля и диагностики состояния конструкции и инженерных сооружений, заключающийся в том, что на пункте контроля регистрируют сигналы с блоков измерения, установленных в местах диагностирования, сравнивают их с заранее зафиксированными значениями и по отклонению поступивших сигналов от заранее зафиксированных судят о наличии изменений контролируемых параметров (патент РФ №2146810, МПК7 G01М 5/00, G08С 17/02, опубл. 20.03.00). Кодированные сигналы, каждый из которых соответствует коду одного из блоков измерения, формируют на пункте контроля, производят опрос блоков измерения кодированными радиосигналами, принимают сигналы на блоках измерения, производят сравнение кода блока измерения с кодом сигнала опроса и при совпадении производят с соответствующего блока измерения передачу на пункт контроля сигнала, несущего измерительную информацию, а сравнение ее с заранее зафиксированным значением производят на пункте контроля.
Недостатком этого способа является высокая погрешность при оценке изменений величины контролируемых параметров, возникающая из-за отсутствия информации о зависимости выходных сигналов блоков измерения от внешнего воздействия на контролируемый участок конструкции как целого, и отсутствие информации о «нулевом» состоянии конструкции, так как за заранее зафиксированное значение выходных сигналов блоков измерения принимается значение, которое в реальной конструкции может таковым не оказаться.
Для осуществления способа контроля и диагностики состояния конструкции и инженерных сооружений используются различные устройства.
Известно устройство дистанционного контроля и диагностики состояния конструкции, содержащее пункт контроля, блоки измерения, размещенные в местах диагностирования, преобразователи, линию связи, контроллер (патент РФ №2146810, МПК7 G01М 5/00, G08С 17/02 от 20.03.00). В известном устройстве блоки измерения установлены на поверхности конструкции. Пункт контроля выполнен в виде ЭВМ с принтером, блоком последовательного интерфейса, соединенного с ее входом-выходом; соединенных последовательно кодера, модулятора, радио приемопередатчика, демодулятора и декодера, выход которого связан со вторым выходом блока последовательного интерфейса, второй выход которого соединен с входом кодера. Каждый блок измерения выполнен в виде последовательно соединенных коммутатора, вторичного блока питания датчика горизонта, аналого-цифрового преобразователя, кодера, модулятора, радио приемопередатчика, демодулятора, декодера со схемой сравнения, выход которого подключен к первому входу коммутатора, ко второму входу которого подключен автономный источник питания, а линией связи является линия радиосвязи через антенны радио приемопередатчика.
Этому устройству присущи недостатки способа, на котором оно основано. Кроме этого при размещении, креплении и защите блоков измерения на поверхности конструкции возникают дополнительные погрешности, обусловленные наличием на конструкции неконтролируемого внешнего воздействия.
Наиболее близким к заявленному способу является способ дистанционного контроля и диагностики состояния конструкции и инженерных сооружений и устройство для его осуществления (патент РФ №2247958, МПК7 G01М 5/00, G08С 17/02 от 10.03.05).
1. Способ дистанционного контроля и диагностики состояния конструкции и инженерных сооружений, заключающийся в том, что на пункте контроля регистрируют сигналы с блоков измерения, установленных в местах диагностирования конструкции, сравнивают их с заранее зафиксированными значениями и по отклонению поступивших сигналов от заранее зафиксированных судят о наличии изменений контролируемых параметров, причем элемент конструкции изготавливают из того же материала, что и вся конструкция, размещают на нем блоки измерения, проводят метрологическую аттестацию элемента с размещенными на нем блоками измерения путем установления зависимостей между сигналами с блоков измерения и калибровочными внешними воздействиями, регистрируют эти зависимости на пункте контроля и используют их в качестве заранее зафиксированных сигналов, врезают элемент с установленными на нем блоками измерения в места диагностирования конструкции и по отклонению поступавших сигналов с блоков измерения от заранее зарегистрированных сигналов судят о состоянии конструкции.
2. Устройство дистанционного контроля и диагностики состояния конструкции и инженерных сооружений в соответствии со способом по п.1, содержащее пункт контроля, блоки измерения, размещенные в местах диагностирования конструкции, преобразователи, линию связи, контроллер, причем блоки измерения размещены на метрологически аттестованном элементе конструкции, изготовленном из того же материала, что и вся конструкция, с размещенными на нем блоками измерения, соединен с соответствующими преобразователями, связанными своими выходами с входом контроллера, подключенного к модему, который через линию связи своим выходом соединен с пунктом контроля.
Недостатком способа является низкая надежность контроля при наличии сбоев в измерительной системе и при возникновении непредсказуемых, особенно экстремальных ситуаций.
Недостаток устройства определяется отсутствием логических блоков управления и интеллектуальных датчиков, обеспечивающих отказоустойчивость и осуществляющих обработку информации в ситуациях, связанных с отказом датчиков и возникновением нештатного режима работы устройства.
Решению поставленной задачи способствуют частные существенные признаки изобретения.
В способе дистанционного контроля и диагностики состояния корпуса судна для повышения надежности способа при возникновении экстремальных ситуаций, связанных с необходимостью предотвращения выхода измеряемых характеристик корпусных конструкций судна за принятые ограничения, предлагается оборудовать рабочее место оператора графическим экраном, связанным интерфейсами с бортовой ЦВМ, процессором нечеткой логики и нейрокомпьютером, с помощью которых обеспечивается функционирование интеллектуальной системы, реализующей обработку измерительной информации и процедуры адаптивного управления в первом логическом блоке на основе самоорганизующейся нейронной сети.
В устройстве дистанционного контроля и диагностики состояния корпуса в пункте контроля (рулевая рубка) для повышения отказоустойчивости устройства при возникновении нештатных ситуаций, связанных с отказом датчика и возникновением нештатного режима работы устройства, дополнительно введены второй логический блок и нейроконтроллер, реализующие операции контроля состояния блоков измерения и построения интеллектуальных датчиков на основе ассоциативных нейронных сетей.
Реализация этой технологии предусматривает решение двух практических задач. Первая из них связана с повышением надежности функционирования устройства в экстремальных ситуациях, а вторая с повышением отказоустойчивости устройства при возникновении сбоев в блоках измерения.
Для обучения нейронных сетей на основе нейрокомпьютера используется информация, полученная от датчиков блоков измерения в реальных условиях эксплуатации судна. В процессе обучения осуществляется настройка весов синаптических (межнейронных) связей.
Таким образом, предлагаемые способ и устройство обеспечивают создание искусственной интеллектуальной среды, включающей в себя функциональные блоки в виде совокупности управляющих элементов на основе бортовой ЦВМ, процессора нечеткой логики и нейрокомпьютера.
На чертеже (фиг.1) представлена блок-схема устройства, реализующего способ контроля прочности и вибрации судна. Устройство содержит элемент конструкции 1, представляющий собой один из контролируемых участков корпусной конструкции, расположенный в носовой части судна, на котором размещены блоки измерения: деформации 2, например тензорезисторные, оптоэлектронные; механического напряжения 3, например основанные на акустической эмиссии; вибрации 4. Блоки измерения деформаций 2 и механических напряжений 3 размещены на наиболее подверженных воздействию внешних динамических нагрузок элементах корпусных конструкций при движении судна во льдах - в районе переменной ватерлинии в носовой части корпуса судна, а блоки измерения вибрации 4 - на носовой и кормовой поперечных переборках. Выходы блоков измерения 2-4 соединены с входами соответствующих преобразователей 5-7, выходы которых, в свою очередь, соединены с входом контроллера 8. Выход контроллера 8 подключен к модему 9, который своим выходом соединен через линию связи 10 с входом удаленного пункта контроля 11.
Удаленный пункт контроля 11 (фиг.2) расположен в рулевой рубке судна и содержит рабочее место оператора 12, интеллектуальную систему 13, два логических блока 14, 15 и нейроконтроллер 16.
Рабочее место оператора 12 (фиг.3) оснащено графическим экраном 17, связанным интерфейсами 18, 19, 20 с бортовой ЦВМ 21, процессором нечеткой логики 22 и нейрокомпьютером 23, обеспечивающими функционирование интеллектуальной системы 13, первого и второго логических блоков 14, 15 и нейроконтроллера 16.
Интеллектуальная система 13 (фиг.4) обеспечивает функционирование устройства контроля прочности и вибрации судна в различных условиях эксплуатации, устанавливает факт возникновения экстремальных ситуаций, выдает практические рекомендации по управлению судном, обеспечивает работу логического блока 14, содержит базу знаний 24, механизм логического вывода 25, систему объяснения 26 и базу данных 27, реализуется на базе процессора нечеткой логики 22 и бортовой ЦВМ 21, представляющей собой многопроцессорный вычислительный комплекс.
Первый логический блок 14 (фиг.5) обеспечивает функционирование устройства контроля при возникновении экстремальных ситуаций, связанных с необходимостью предотвращения выхода измеряемых характеристик прочности и вибрации корпусных конструкций судна за принятые ограничения, управляется с помощью интеллектуальной системы 13, обеспечивающей работу блока анализа и прогноза ситуации 28 и блока обучения самоорганизующейся нейронной сети 29. Логические операции, выполняемые в блоке 14, поддерживаются процессором нечеткой логики 22, а операции по самоорганизации нейронной сети 30 на основе нейрокомпьютера 23.
Второй логический блок 15 (фиг.6) обеспечивает функционирование устройства контроля при возникновении нештатных ситуаций, связанных с отказом датчиков и возникновением нештатного режима работы устройства, управляется нейрконтроллером 16, с помощью которого осуществляются операции в блоках контроля датчиков 31 и обучения ассоциативных нейронных сетей 32, размещенных в блоке интеллектуальных датчиков 33. Логические операции, выполняемые в блоке 15, поддерживаются процессором нечеткой логики 22, а настройка ассоциативных нейронных сетей 34, 35, 36 ведется на основе нейрокомпьютера 23.
Нейроконтроллер 16 (фиг.7) реализуется на основе нейрокомпьютера 23 и содержит блок диагностики 37 и блок управления 38, блок диагностики 37 на основе сигнала, поступающего от блока контроля датчиков 31, обеспечивает принятия решений по настройке ассоциативных нейронных сетей 34, 35, 36 в блоке интеллектуальных датчиков 33 в зависимости от данных идентификации ситуации с использованием матриц управления для нормальных условий эксплуатации 40, экстремальных 41 и нештатных ситуаций 42, блок управления 38 передает команды управления во второй логический блок 15 при возникновении нештатных ситуаций. Возникновение нештатной ситуации устанавливается в блоке контроля датчиков 31 при наличии сбоев в работе блоков измерения 2, 3, 4. Настройка ассоциативных нейронных сетей 34, 35, 36 производится в результате установления факта возникновения отказа датчиков 2, 3, 4 с целью локализации места отказа.
Алгоритмы функционирования ассоциативных нейронных сетей 34, 35, 36 в блоке интеллектуальных датчиков 33 разрабатываются с учетом реальных данных, характеризующих поведение судна в заданных условиях эксплуатации, накапливаемых в базе данных 27 интеллектуальной системы 13. В частности, при обработке потока информации о динамике судна на волнении обеспечиваются режимы функционирования блока интеллектуальных датчиков 33 при растяжении, изгибе, кручении и вибрации на реальном морском волнении различной интенсивности. Интеллектуальные датчики 34, 35, 36 способны также настраиваться на условия движения судна в ледовом поле, включая торосистый и битый лед, а также имитировать динамику судна при развивающемся шторме, тяжелом обледенении и других экстремальных ситуациях, возникающих в практике эксплуатации судов и плавучих технических средств освоения океана.
Способ осуществляется следующим образом (на примере контроля состояния конструкций корпуса судна).
Кодированный командный сигнал с кодом, соответствующим заданному измерительному элементу конструкции корпуса судна 1, подается с рабочего места оператора 12 удаленного пункта контроля (рулевая рубка) 11 по линии связи 10 через модем 9 на контроллер 8 и переводит его из ждущего режима в режим измерения. В этом режиме аналоговые сигналы с блоков измерения 2, 3, 4 поступают на соответствующие преобразователи 5, 6, 7, где осуществляется их необходимое усиление и преобразование в цифровой код. Сигналы от преобразователей поступают на вход контроллера 8, представляющего собой микропроцессор, который производит предварительную обработку информации, поступившей от блоков измерения 2, 3, 4. Результат вычислений подается последовательно на модем 9 и через линию связи 10 на удаленный пункт контроля 11, где на рабочем месте оператора 12, оснащенного графическим экраном 17, соединенным интерфейсами 18, 19, 20 с ЦВМ 21, процессором нечеткой логики 22 и нейрокомпьютером 23. Этот результат сравнивается с данными, полученными при метрологической аттестации, и поступает для дальнейшей обработки в интеллектуальную систему 13, содержащую базу знаний 24, механизм логического вывода 25, систему объяснений 26 и базу данных 27, осуществляющую анализ технического состояния заданного элемента конструкции корпуса судна в зависимости от сложившейся ситуации.
В случае возникновения экстремальной ситуации, установленной в процессе функционирования интеллектуальной системы 13, команда управления дальнейшей обработкой информации от интеллектуальной системы 13 передается в первый логический блок 14, где на основе блока анализа и прогноза 28 осуществляется оценка ситуации и прогноз ее развития, а с помощью блока обучения 29 - формирование самоорганизующейся нейронной сети 30 на основе нейрокомпьютера 23.
При возникновении отказа датчика, установленного в блоке диагностики 37, блок управления 38 нейроконтроллера 16 передает команды управления дальнейшей обработкой информации во второй логический блок 15, где на основе блока обучения 32 в блоке интеллектуальных датчиков 33 с помощью нейрокомпьютера 23 осуществляется настройка ассоциативных нейронных сетей 34, 35, 36. Таким образом, факт обнаружения отказа датчика устанавливается в блоке диагностики 37 нейроконтроллера 16, а локализация места отказа осуществляется с помощью интеллектуальных датчиков 33 на основе ассоциативных нейронных сетей 34, 35, 36, обучение которых реализуется блоком обучения 32.
Алгоритм функционирования предлагаемого самоорганизующегося устройства на основе способа контроля прочности и вибрации судна реализуется в виде последовательности шагов.
Шаг 1. Составляется спецификация режимов работы устройства в различных условиях эксплуатации, в том числе в нештатных и экстремальных ситуациях.
Шаг 2. Осуществляется проверка возникновения экстремальной ситуации на основе интеллектуальной системы 13.
Шаг 3. Если экстремальная ситуация не возникла, то дальнейший контроль прочности и вибрации судна осуществляется в процессе функционирования интеллектуальной системы 13 и состоит в оценке ситуации на базе критериев, определяющих выход измеряемых динамических характеристик за принятые ограничения, с использованием информации, поступившей с блока датчиков 2, 3, 4, выдаче практических рекомендаций и принятии решения по управлению судном в текущей ситуации.
Шаг 4. Если экстремальная ситуация возникла, то формируется логика функционирования устройства контроля прочности и вибрации судна на основе интеллектуальной системы 13 и первого логического блока 14, выполняющего функции анализа и прогноза ситуации в блоке 28 и обучения самоорганизующейся нейронной сети 30 в блоке 29.
Шаг 5. Осуществляется проверка возникновения нештатной ситуации, связанной с отказом датчиков 2, 3, 4 на основе блоков диагностики 37 и управления 38 нейроконтроллера 16.
Шаг 6. Если нештатная ситуация, связанная с отказом датчиков 2, 3, 4 не возникла, то осуществляется переход к шагу 3.
Шаг 7. Если нештатная ситуация, связанная с отказом датчиков 2, 3, 4 возникла, то формируется логика функционирования устройства контроля прочности и вибрации судна на основе второго логического блока 15, выполняющего функции контроля датчиков в блоке 31 и функции обучения 29 ассоциативных нейронных сетей 34, 35, 36 в блоке интеллектуальных датчиков 33.
Обучение самоорганизующихся нейронных сетей 34, 35, 36 осуществляется на основе нейрокомпьютера 23 с помощью стандартного алгоритма Кохонена, использующего соревновательный принцип обучения на конкретных примерах реализации сигналов с датчиков 2, 3, 4, воспринимающих динамику взаимодействия судна с внешней средой в экстремальных ситуациях. В процессе обучения каждому входному параметру хi (i=1, …, n) сопоставляется измерение многомерного пространства. Размерность этого пространства равна числу параметров n, возможные значения которых задаются специальной шкалой. Задача состоит в определении свойств точек xj=(xj1, …, xjn) n-мерного пространства. Величина xji характеризует значение входного параметра i точки в j примерах, используемых при обучении самоорганизующейся нейронной сети. Точки многомерного пространства образуют класс связанных областей точек, обладающих определенными свойствами. Этот класс запоминается и используется при функционировании устройства для решения задачи контроля и управления.
Обучение ассоциативных нейронных сетей 34, 35, 36 осуществляется на основе нейрокомпьютера 23 с помощью стандартного алгоритма обратного распространения ошибки, основанного на методе градиентного спуска, на тестовых примерах, характеризующих сигналы датчиков 2, 3, 4 в нормальных условиях эксплуатации устройства и при его функционировании в случае возникновения отказов датчиков. Входными значениями для нейронных сетей 34, 35, 36 являются характеристики сигналов с датчиков 2, 3, 4, поступающие через преобразователи 6, 7, 8, контроллер 10, модем 11 и линию связи 12. Выходы обученных нейронных сетей 34, 35, 36 совпадают со значениями сигналов с датчиков 2, 3, 4. Если разность этих сигналов превышает допустимый уровень, блок диагностики 37 выдает блоку управления 38 сигнал об отказе конкретного датчика. После этого в качестве выходного сигнала датчиков принимается его значение на выходе одной из ассоциативных нейронных сетей 34, 35, 36.
Принятие решений по использованию интеллектуального датчика (фиг.8) реализуется в блоке 39 с помощью нечеткого вывода, реализуемого процессором нечеткой логики 22 на основе специальных матриц управления 40, 41, 42, размещенных в блоке диагностики 37. Разработка таких матриц ведется для нормальных условий эксплуатации 40, экстремальных ситуаций 41 и при отказе датчиков (нештатные ситуации) 42.
Для надежного функционирования интеллектуальных датчиков 34, 35, 36 используется информация, накапливаемая в базе данных 27 интеллектуальной системы 13 в процессе эксплуатации устройства. На основе этой информации производится окончательная корректировка алгоритмов, заложенных в формализованную систему знаний при построении интеллектуальных датчиков.
Для обеспечения надежности работы устройства контроля прочности и вибрации судна в экстремальных ситуациях применяются данные динамических измерений, близкие к предельным значениям характеристик в непрерывно изменяющихся внешних условиях.
Практическая реализация разработанного способа связана с проблемой старения информации, что требует непрерывного поддержания работоспособности устройства на базе фактической информации о поведении судна в различных условиях эксплуатации.
В результате использования предлагаемого изобретения в процессе функционирования интеллектуальной системы 13 и нейроконтроллера 16 формируется гибкое информационное пространство контроля и диагностики состояния корпусных конструкций на основе ЦВМ 21, процессора нечеткой логики 22 и нейрокомпьютера 23, включающее методы принятия решений в нечеткой среде и нейросетевые модели, настраиваемые адаптивные автоматизированные циклы обучения нейронных сетей с учетом особенностей динамики взаимодействия судна с внешней средой в различных условиях эксплуатации, в том числе в нештатных и экстремальных ситуациях. Обработка измерительной информации и управление процессом диагностики осуществляются в режиме реального времени.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОРСКОЙ ИНТЕЛЛЕКТУАЛЬНЫЙ ТРЕНАЖЕР | 2003 |
|
RU2251157C2 |
| СПОСОБ КОНТРОЛЯ ЭКСТРЕМАЛЬНЫХ СИТУАЦИЙ В УСЛОВИЯХ НЕОПРЕДЕЛЕННОСТИ СРЕДЫ | 2015 |
|
RU2589367C1 |
| СПОСОБ КОНТРОЛЯ МОРЕХОДНОСТИ СУДНА | 1998 |
|
RU2147540C1 |
| СПОСОБ КОНТРОЛЯ СКОРОСТИ СУДНА ПРИ ОБРАСТАНИИ КОРПУСА | 1996 |
|
RU2111885C1 |
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ И СКОРОСТИ СУДНА | 2004 |
|
RU2259301C1 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ КАЧКИ СУДНА ПРИ КОНТРОЛЕ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ В МОРСКИХ УСЛОВИЯХ | 2014 |
|
RU2571389C2 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ МОРСКИХ СУДОВ | 2017 |
|
RU2672236C2 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ИНФОРМАЦИОННО-ПРЕОБРАЗУЮЩИХ ЭЛЕМЕНТОВ БОРТОВОГО ОБОРУДОВАНИЯ ВОЗДУШНОГО СУДНА НА ОСНОВЕ МАШИННОГО ОБУЧЕНИЯ | 2022 |
|
RU2802976C1 |
| СПОСОБ КОНТРОЛЯ ЧРЕЗВЫЧАЙНЫХ СИТУАЦИЙ НА ОСНОВЕ ИНТЕГРАЦИИ ВЫЧИСЛИТЕЛЬНЫХ И ИНФОРМАЦИОННЫХ КОМПОНЕНТ ГРИД-СИСТЕМЫ | 2014 |
|
RU2569568C1 |
| СПОСОБ ПРОЕКТИРОВАНИЯ МНОГОРЕЖИМНОЙ ИНТЕЛЛЕКТУАЛЬНОЙ СИСТЕМЫ УПРАВЛЕНИЯ РАСПРЕДЕЛЕННОЙ СРЕДОЙ МЯГКИХ ВЫЧИСЛЕНИЙ | 2014 |
|
RU2596992C2 |
Группа изобретений (способ и устройство) относится к контрольно-измерительной технике и может быть использована для непрерывного неразрушающего контроля, оценки и прогнозирования технического состояния конструкций корпуса судна в течение всего периода эксплуатации. Способ заключается в том, что на конструкциях корпуса судна регистрируют сигналы с блоков измерения, установленных в местах диагностирования конструкции, и сравнивают их с заранее зафиксированными значениями. При возникновении непредсказуемых, особенно нештатных и экстремальных ситуаций с целью повышения надежности контроля реализуется технология обработки информации, использующая нейросетевые алгоритмы и методы принятия решений в нечеткой среде на основе бортовой ЦВМ в виде многопроцессорного вычислительного комплекса, нейрокомпьютера и процессора нечеткой логики. Устройство содержит пульт контроля, блоки измерения, размещенные в местах диагностирования конструкции, преобразователи, контроллер, модем и линию связи. Причем блоки измерения размещены на наиболее подверженных воздействию внешних динамических нагрузок и вибрации элементах конструкций, которые соединены с соответствующими преобразователями, связанными со своими выходами с входом контроллера, подключенного к модему, который через линию связи своим выходом соединен с пультом контроля, содержащим графический экран оператора, соединенный интерфейсами с бортовой ЭВМ, нейрокомпьютером и процессором нечеткой логики, обеспечивающими функционирование интеллектуальной системы и нейроконтроллера, с помощью которых осуществляется управление логическими блоками обработки измерительной информации в экстремальных и нештатных ситуациях, связанных с недопустимыми отклонениями в параметрах прочности и вибрации и при возникновением сбоев в блоках измерения. Технический результат - создание простого, надежного, оперативного отказоустойчивого средства неразрушающего контроля и способа получения достоверной, своевременной и точной информации. 2 н.п. ф-лы, 8 ил.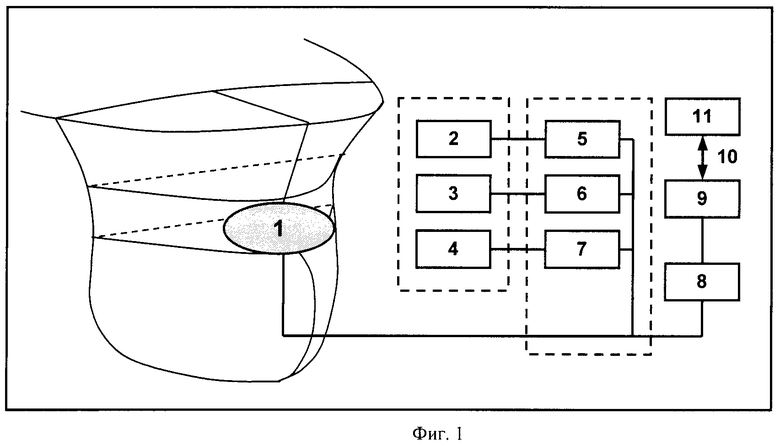
1. Способ дистанционного контроля и диагностики состояния конструкции и инженерных сооружений, заключающийся в том, что на пункте контроля регистрируют сигналы с блоков измерения, установленных в местах диагностирования конструкции, сравнивают их с заранее зафиксированными значениями и по отклонению поступивших сигналов от заранее зафиксированных судят о наличии изменений контролируемых параметров, причем элемент конструкции изготавливают из того же материала, что и вся конструкция, размещают на нем блоки измерения, проводят метрологическую аттестацию элемента с размещенными на нем блоками измерения путем установления зависимостей между сигналами с блоков измерения и калибровочными внешними воздействиями, регистрируют эти зависимости на пункте контроля и используют их в качестве заранее зафиксированных сигналов, врезают элемент с установленными на нем блоками измерения в места диагностирования конструкции и по отклонению поступивших сигналов с блоков измерения от заранее зарегистрированных сигналов судят о состоянии конструкции, отличающийся тем, что на пункте контроля, содержащем рабочее место оператора, оснащенное графическим экраном, интеллектуальную систему, первый и второй логические блоки, нейроконтроллер, сравнивают регистрируемые сигналы с блоков измерения с данными, полученными при метрологической аттестации, и направляют для дальнейшей обработки в интеллектуальную систему, осуществляющую анализ технического состояния заданного элемента конструкции в зависимости от сложившейся ситуации, причем в случае возникновения экстремальной ситуации, установленной интеллектуальной системой, дальнейшую обработку информации проводят в первом логическом блоке, где на основе блока анализа и прогноза осуществляют оценку ситуации и прогноз ее развития, а с помощью блока обучения формируют самоорганизующуюся нейронную сеть на основе нейрокомпьютера, в случае возникновения отказа датчика блока измерения, установленного блоком диагностики нейроконтроллера, обеспечивающего контроль датчиков, дальнейшую обработку информации проводят при помощи блока управления нейроконтроллера во втором логическом блоке, где на основе блока обучения с помощью нейрокомпьютера осуществляют контроль датчиков и настройку ассоциативных нейронных сетей, определяющих место отказа.
2. Устройство дистанционного контроля и диагностики состояния конструкции и инженерных сооружений, содержащее пункт контроля, блоки измерения, размещенные в местах диагностирования конструкции, преобразователи, линию связи, контроллер, причем блоки измерения размещены на метрологически аттестованном элементе конструкции, изготовленном из того же материала, что и вся конструкция, с размещенными на нем блоками измерения, соединен с соответствующими преобразователями, связанными своими выходами с входом контроллера, подключенного к модему, который через линию связи своим выходом соединен с пунктом контроля, отличающееся тем, что пункт контроля содержит рабочее место оператора, оснащенное графическим экраном, связанным интерфейсами с бортовой ЦВМ, процессором нечеткой логики и нейрокомпьютером, входы и выходы которых соединены с интеллектуальной системой, содержащей базу знаний, механизм логического вывода, систему объяснений и базу данных, также с первым логическим блоком, взаимосвязанным с интеллектуальной системой и содержащим блок анализа и прогноза и блок обучения самоорганизующейся нейронной сети при возникновении экстремальных ситуаций, а также со вторым логическим блоком, содержащим блок обучения, где осуществляется настройка ассоциативных нейронных сетей, блок контроля датчиков и блок интеллектуальных датчиков, взаимосвязанным с интеллектуальной системой и управляемым нейроконтроллером, содержащим блок диагностики и блок управления, обеспечивающими функционирование устройства при возникновении экстремальных ситуаций.
| СПОСОБ ДИСТАНЦИОННОГО КОНТРОЛЯ И ДИАГНОСТИКИ СОСТОЯНИЯ КОНСТРУКЦИИ И ИНЖЕНЕРНЫХ СООРУЖЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2247958C2 |
| JP 8094499 А 12.04.1996 | |||
| WO 9944106 A1, 02.09.1999 | |||
| СПОСОБ ДИАГНОСТИРОВАНИЯ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2239869C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СВЕТОФОРНЫМ ОБЪЕКТОМ С ЭВМ С НЕЙРОПРОГРАММАМИ | 1998 |
|
RU2151424C1 |

