Изобретение относится к робототехнике и предназначено для создания системы управления движителями подводного робота.
Известно устройство для управления приводом робота (Патент РФ N 1782721, Бюллетень N 47, 1992 г. ), содержащее последовательно соединенные первый сумматор, второй сумматор, первый блок умножения, третий сумматор, усилитель и двигатель, связанный с первым датчиком скорости непосредственно и через редуктор с первым датчиком положения, выход которого подключен к первому входу первого сумматора, соединенного вторым входом со входом устройства, последовательно подключенные релейный элемент и четвертый сумматор, второй вход которого подключен ко входу релейного элемента, второму входу второго сумматора и выходу первого датчика скорости, выход - ко второму входу третьего сумматора, последовательно соединенные первый задатчик сигнала и пятый сумматор, а также второй датчик скорости, датчик массы, второй задатчик сигнала, квадратор, шестой сумматор, и со второго по пятый блоки умножения, датчик ускорения, а также первый и второй функциональные преобразователи, вход каждого из которых соединен с выходом первого датчика положения, выход датчика массы подключен ко второму входу первого блока умножения, первому входу шестого сумматора и второму входу пятого сумматора, соединенного выходом с первыми входами второго и третьего блоков умножения, второй вход каждого из которых подключен, соответственно, к выходу первого и второго функционального преобразователя, а их выходы, соответственно, ко второму входу шестого сумматора и первому входу четвертого блока умножения, соединенного вторым входом через квадратор с выходом второго датчика скорости, а выходом - с третьим входом четвертого сумматора, четвертый вход которого подключен к выходу пятого блока умножения, соединенного первым входом с выходом датчика ускорения, а вторым входом - с выходом шестого сумматора, третий вход которого подключен к выходу второго задатчика сигнала, выход второго сумматора соединен с третьим входом третьего сумматора.
Недостатком данного устройства является то, что оно, будучи предназначенное только для управления манипулятором, не обеспечивает требуемую точность и устойчивость работы приводов подводных аппаратов.
Известно также устройство для управления приводом робота (Патент РФ N 2066626, Бюллетень N 26, 1996 г.), содержащее последовательно соединенные первый сумматор, второй сумматор, первый блок умножения, третий сумматор, первый усилитель и двигатель, связанный с первым датчиком скорости непосредственно и через редуктор с первым датчиком положения, выход которого подключен к первому входу первого сумматора, соединенного вторым входом со входом устройства, последовательно подключенные релейный элемент и четвертый сумматор, второй вход которого подключен ко входу релейного элемента, второму входу второго сумматора и выходу первого датчика скорости, выход - ко второму входу третьего сумматора, последовательно соединенные первый задатчик сигнала и пятый сумматор, а также второй датчик скорости, датчик массы, второй задатчик сигнала, первый квадратор, шестой сумматор и со второго по пятый блоки умножения, датчик ускорения, а также первый и второй функциональные преобразователи, вход каждого из которых соединен с выходом первого датчика положения, выход датчика массы подключен ко второму входу первого блока умножения, первому входу шестого сумматора и второму входу пятого сумматора, соединенного выходом с первыми входами второго и третьего блоков умножения, второй вход каждого из которых подключен, соответственно, к выходу первого и второго функционального преобразователя, а их выходы, соответственно, ко второму входу шестого сумматора и первому входу четвертого блока умножения, соединенного вторым входом через первый квадратор с выходом второго датчика скорости, а выходом - с третьим входом четвертого сумматора, четвертый вход которого подключен к выходу пятого блока умножения, соединенного первым входом с выходом датчика ускорения, а вторым входом - с выходом шестого сумматора, третий вход которого подключен к выходу второго задатчика сигнала, а выход второго сумматора соединен с третьим входом третьего сумматора, последовательно соединенные второй датчик положения, седьмой сумматор, второй вход которого подключен к выходу первого датчика положения, третий функциональный преобразователь и шестой блок умножения, второй вход которого подключен к выходу пятого сумматора, а выход - к пятому входу четвертого сумматора, а также последовательно соединенные второй усилитель, четвертый функциональный преобразователь, седьмой блок умножения, восьмой сумматор и восьмой блок умножения, последовательно соединенные пятый функциональный преобразователь, девятый и десятый блоки умножения, последовательно соединенные третий датчик скорости и второй квадратор, выход которого подключен ко второму входу восьмого блока умножения, выход которого соединен с шестым отрицательным входом четвертого сумматора, последовательно соединенные третий задатчик постоянного сигнала и девятый сумматор, второй вход которого подключен к выходу второго задатчика постоянного сигнала, его третий вход - к выходу датчика массы, а его выход - ко второму входу седьмого блока умножения, причем второй вход десятого блока умножения через шестой функциональный преобразователь подключен к выходу седьмого сумматора и входу второго усилителя, а его выход - ко второму положительному входу восьмого сумматора, второй вход девятого блока умножения соединен с выходом пятого сумматора, а вход пятого функционального преобразователя - с выходом второго датчика положения (прототип).
Данное устройство по своей сущности является наиболее близким к предлагаемому изобретению.
В заявляемом устройстве в отличие от прототипа исполнительным органом является гребной винт движителя подводного робота, совершающий вращательное движение в вязкой среде. Особенность данного объекта заключается в наличии дополнительного моментного воздействия на привод, нелинейно зависящего от скорости вращения винта, а также существенно нелинейной зависимости силы тяги движителя от скорости вращения винта. Устройство-прототип не может обеспечить качественного управления движителем подводного робота, так как не учитывает влияние указанных факторов на динамические свойства системы.
Технической задачей изобретения является построение устройства для управления приводом движителя подводного робота, которое обеспечит требуемые высокие показатели качества работы за счет компенсации дополнительных существенно нелинейных взаимосвязей, возникающих при вращении гребного винта в вязкой жидкости.
Поставленная задача решается тем, что в устройство для управления движителем подводного робота, содержащее последовательно соединенные блок умножения, первый сумматор, усилитель и двигатель, связанный непосредственно с датчиком скорости, выход которого подключен ко второму входу первого сумматора, дополнительно введены последовательно соединенные задатчик входного сигнала, второй сумматор и блок деления, выход которого подключен к третьему входу первого сумматора, последовательно соединенные блок вычисления модуля, вход которого подключен к выходу датчика скорости, и третий сумматор, второй вход которого подключен к выходу задатчика постоянного сигнала, а выход соединен со вторым входом блока деления, причем выход блока вычисления модуля соединен также с первым входом блока умножения, второй вход которого подключен к выходу датчика скорости, а выход соединен со вторым отрицательным входом второго сумматора.
Технический результат заявляемого решения выражается в формировании дополнительных сигналов управления, подаваемых на вход привода, которые обеспечивают компенсацию отрицательного влияния существенно нелинейных взаимосвязей, возникающих при вращении винта в вязкой жидкости, на показатели качества работы системы. Таким образом, заявленная совокупность существенных признаков, приведенная в отличительной части формулы изобретения, позволила решить поставленную техническую задачу.
В заявляемой системе в отличие от прототипа введены блоки и связи, реализующие дополнительную нелинейную обратную связь по скорости вращения вала движителя. Следовательно, заявляемое устройство является новым и обладает изобретательским уровнем, т.е. оно явным образом не следует из уровня техники и пригодно для промышленного применения.
Изобретение поясняется чертежом, на котором представлена блок-схема предлагаемого устройства для управления движителем подводного робота.
На чертеже приведены следующие обозначения:
τвх - входной сигнал, задающий требуемую силу тяги движителя;
ε - ошибка привода (величина рассогласования);
ω - угловая скорость вращения вала двигателя 4;
u* - усиливаемый сигнал;
u - сигнал управления двигателем 4;
δ - малый постоянный положительный сигнал.
Устройство для управления движителем подводного робота содержит три сумматора 1, 2 и 3, причем сумматоры 2 и 3 по входам соединены с задатчиками 4 и 5 соответственно, последовательно соединенные блок 6 умножения, первый сумматор 1, усилитель 7 и двигатель 8, соединенный непосредственно с датчиком 9 скорости, а также блок 10 деления и блок 11 вычисления модуля, причем выход второго сумматора 2 соединен с первым входом блока 10 деления, а его второй вход - с выходом блока 6 умножения, выход датчика 9 скорости соединен с первым входом блока 6 умножения, входом блока 11 вычисления модуля и вторым входом первого сумматора 1, выход блока 11 вычисления модуля соединен со вторым входом блока 6 умножения и вторым входом третьего сумматора 3, выход которого соединен со вторым входом блока 10 деления, выход которого соединен с третьим входом первого сумматора 1, объект управления 12.
Устройство работает следующим образом.
Сигнал ошибки ε с сумматора 2 после коррекции в блоках 10 и 1, усиливаясь, поступает на электродвигатель 8, приводя его вал во вращательное движение с угловой скоростью, зависящей от величины поступающего сигнала u и момента вязкого трения, возникающего при вращении гребного винта в жидкости и нелинейно зависящего от величины ω. Сила тяги (упор) движителя также нелинейно зависит от скорости вращения винта. Наличие указанных нелинейностей приводит к снижению показателей качества работы традиционных систем и значительному отклонению процессов управления от делаемых в большинстве режимов эксплуатации движителя.
При условии применения электродвигателя постоянного тока и учета вязкого трения, возникающего при вращении гребного винта в жидкости, динамика движителя описывается нелинейным дифференциальным уравнением первого порядка
где Jд - момент инерции вращающихся частей движителя с учетом присоединенных моментов инерции; Kс - коэффициент вязкого трения винта; Km, Kw - коэффициенты момента и противоЭДС; R - сопротивление якорной цепи; Kу - коэффициент усиления усилителя мощности.
Сила тяги движителя τд связана со скоростью вращения вала ω нелинейным алгебраическим уравнением
τд = Kтω|ω|,
где Kт - коэффициент тяги.
Очевидно, что приведенные уравнения являются существенно нелинейными, и, как следствие, процессы в системе не могут иметь стабильно высокие показатели качества во всех режимах работы.
В заявляемом устройстве первый положительный вход сумматора 2 (со стороны задатчика 4 входного сигнала) имеет коэффициент усиления Kд, а его второй отрицательный вход (со стороны блока 6 умножения) имеет коэффициент усиления Kт. Первый положительный вход сумматора 3 (со стороны блока 11 вычисления модуля) имеет коэффициент усиления 2TдKт/Jд, а его второй положительный вход (со стороны задатчика 5 постоянного сигнала) имеет единичный коэффициент усиления. Первый положительный вход сумматора 1 (со стороны блока 6 умножения) имеет коэффициент усиления KсR/(KуKm), его второй положительный вход (со стороны блока 10 деления) имеет коэффициент усиления R/(KуKm), а его третий положительный вход (со стороны датчика 9 скорости) имеет коэффициент усиления Kw/Kу.
Поскольку датчик 9 скорости измеряет угловую скорость вращения вала двигателя, то после преобразования его выходного сигнала в блоках 6 и 11 на выходе сумматора 2 формируется сигнал Kдτвх-Kтω|ω|, а на выходе сумматора 3 - сигнал 2TдKт|ω|/Jд+δ (где δ - малый постоянный положительный сигнал с выхода задатчика 5, устраняющий ситуацию типа "деление на ноль" при малых скоростях вращениях вала двигателя).
На выходе блока 10 деления формируется сигнал (Kдτвх-Kтω|ω|)/(2TдKт|ω|/Jд+δ), который в рабочих режимах движителя ввиду малости δ может быть представлен в виде Jд(Kдτвх-Kтω|ω|)/(2TдKт|ω|). С учетом указанных выше коэффициентов усиления входов сумматора 1 на его выходе окончательно будет сформирован сигнал вида
Подставив значение u* (см. (2)) в уравнение (1), получим выражение, описывающее динамику привода с учетом введенной коррекции
где Tд и Kд - постоянные желаемые параметры.
Таким образом, в результате применения заявленного устройства система управления движителем в целом в любых режимах работы будет иметь требуемые динамические свойства (соответствующие линейному апериодическому звену и зависящие только от задаваемых на этапе проектирования значений коэффициентов Tд и Kд) и показатели качества.
Изобретение относится к робототехнике и используется для создания системы управления движителями подводного робота. Технический результат - обеспечение требуемых динамических свойств и показателей качества работы системы управления движителем подводного робота в условиях существенного слияния вязкой окружающей среды. Для формирования необходимых корректирующих сигналов используются задатчик входного сигнала, второй и третий сумматоры, блок деления, блок вычисления модуля и задатчик постоянного сигнала. Эти элементы реализуют дополнительную нелинейную обратную связь по скорости вращения вала двигателя. 1 ил.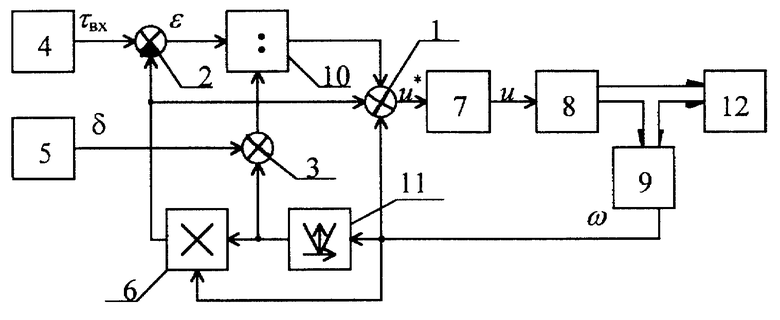
Устройство для управления движителем подводного робота, содержащее три сумматора, два из которых по входам соединены с задатчиками, последовательно соединенные блок умножения, первый сумматор, усилитель и двигатель, соединенный непосредственно с датчиком скорости, отличающееся тем, что оно снабжено блоком деления и блоком вычисления модуля, причем выход второго сумматора соединен с первым входом блока деления, а его второй вход - с выходом блока умножения, выход датчика скорости соединен с первым входом блока умножения, входом блока вычисления модуля и вторым входом первого сумматора, выход блока вычисления модуля соединен со вторым входом блока умножения и вторым входом третьего сумматора, выход которого соединен со вторым входом блока деления, выход которого соединен с третьим входом первого сумматора.
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 1994 |
|
RU2066626C1 |
| Щитовой добычной агрегат для очистной выемки угля при разработке пологопадающих пластов короткими забоями | 1957 |
|
SU120198A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОКСИПРОИЗВОДНЫХ БЕНЗОЛА В ВОДНЫХ РАСТВОРАХ | 1992 |
|
RU2065598C1 |
| US 4815007 A, 21.03.1989 | |||
| УЧЕБНО-ТРЕНИРОВОЧНЫЙ БОЕПРИПАС | 1999 |
|
RU2146801C1 |
