Изобретение относится к системам управления динамическими объектами и предназначено для создания системы управления скорости движения подводного робота.
Известно устройство для управления движителем подводного робота ( 2147985, Бюл. 12, 2000), содержащее восемь сумматоров, семь блоков умножения, два датчика скорости, квадратор, три функциональных преобразователя, задатчик входного сигнала, релейный элемент, усилитель и двигатель, первый, сумматор, второй сумматор, первый блок умножения, третий сумматор, усилитель и двигатель, соединены последовательно и двигатель соединен непосредственно с первым датчиком скорости, также оно снабжено двумя блоками деления и двумя блоками вычисления модуля, причем последовательно соединены четвертый сумматор, второй блок умножения, второй вход которого соединен с выходом квадратора, первчй функциональный преобразователь, второй функциональный преобразователь, первый блок деления, второй вход которого через шестой сумматор соединен с выходом первого сумматора и входом квадратора, третий блок умножения, седьмой сумматор, второй вход которого соединен с выходом второго сумматора, четвертый блок умножения, третий функциональный преобразователь, второй блок деления, второй вход которого через восьмой сумматор, своим вторым отрицательным входом присоединенный к выходу первого блока умножения, соединен с выходом задатчика входного сигнала, а выход - со входом третьего сумматора, последовательно соединены второй датчик скорости, первый блок вычисления модуля, пятый блок умножения, выход которого соединен с первым отрицательным входом первого сумматора, при этом выход второго датчика скорости соединен со вторым отрицательным входом первого сумматора, первый вход шестого блока умножения соединен с выходом четвертого сумматора, вторым входом второго сумматора, вторым входом шестого сумматора, третьим входом седьмого сумматора, а выход шестого блока умножения соединен с третьим входом третьего сумматора, первый вход седьмого блока умножения соединен с выходом первого функционального преобразователя, а выход - с третьим отрицательным входом второго сумматора, выход второго блока вычисления модуля соединен со вторым входом первого блока умножения, вторым входом шестого блока умножения, вторым входом третьего блока умножения, первым входом четвертого сумматора, вход релейного элемента соединен с выходом первого датчика скорости, входом второго блока вычисления модуля, четвертым входом третьего сумматора, четвертым входом седьмого сумматора, вторым входом четвертого сумматора, третьим входом первого сумматора, вторым входом второго блока умножения, а выход релейного элемента соединен со вторым входом четвертого блока умножения, вторым входом пятого блока умножения и вторым входом седьмого блока умножения (аналог).
Недостатком данного устройства является то, что оно используется для управления только движителем и не предназначено для непосредственного управления скоростью движения подводного робота.
Известна релейная адаптивная система (патент SU 1571548 А1, Бюл. 22, 1990 г. ), содержащая последовательно соединенные первый измеритель рассогласования, первый сумматор, первый релейный элемент, электродвигатель постоянного тока, редуктор, выходной вал которого механически соединен с объектом управления и датчиком положения, выход которого соединен с первым входом первого измерителя рассогласования, второй вход которого является входом системы, вход датчика скорости, соединенного входом с выходным валом электродвигателя постоянного тока, подключен к первому входу блока умножения, выход которого соединен с вторым входом первого сумматора, а также второй релейный элемент, последовательно соединенные источник эталонного сигнала, второй измеритель рассогласования, ключ, регулятор и второй сумматор, второй вход и выход которого подключены соответственно к выходу источника эталонного сигнала и второму входу блока умножения, вход фильтра соединен с выходом первого релейного элемента, выход блока выделения модуля соединен с вторым входом второго измерителя рассогласования и входом второго релейного элемента, подключенного выходом к управляющему входу ключа (прототип).
Данное устройство по своей технической сущности является наиболее близким к предлагаемому изобретению.
Недостатком данного устройства является то, что оно обеспечивает уменьшение времени обнуления ошибки только в системе управления углом поворота электродвигателя. В случае его применения для управления скоростью подводного робота в разрывном сигнале управления этого устройства из-за влияния вязкой окружающей среды появляются постоянные составляющие, обусловленные ненулевым значением задающего сигнала скорости. В результате параметр скольжения μ не будет характеризовать реальное положение линии скольжения по отношению к вырожденной траектории. Поэтому используемое в прототипе устройство самонастройки становится неработоспособным. Для устранения этого отрицательного эффекта необходимо вводить дополнительный сигнал, который компенсирует постоянные составляющие в разрывном сигнале управления, вызванные влиянием вязкой среды.
Задачей, на решение которой направлено заявленное техническое решение, является построение адаптивной системы с переменной структурой для управления скоростью движения подводного робота, которая обеспечит самонастройку системы и, следовательно, уменьшение времени обнуления ошибки в благоприятных режимах работы за счет введения дополнительных сигналов, компенсирующих влияние гидродинамических сил вязкого трения.
Технический результат заявляемого решения выражается в формировании дополнительных сигналов управления, которые компенсируют отрицательное влияние сил вязкого трения со стороны окружающей среды.
Поставленная задача решается тем, что в адаптивную систему с переменной структурой для управления скоростью движения подводного робота, содержащую последовательно соединенные первый блок умножения, первый сумматор, первый релейный элемент, фильтр, блок выделения модуля, измеритель рассогласования, ключ, второй вход которого через второй релейный элемент подсоединен к выходу первого блока выделения модуля, интегратор, второй сумматор, второй вход которого соединен с выходом источника эталонного сигнала и вторым входом первого измерителя рассогласования, а его выход соединен с первым входом первого блока умножения, дополнительно введены последовательно соединенные третий сумматор, первый вход которого соединен со входом системы, второй блок выделения модуля, второй блок умножения, второй вход которого соединен с выходом первого релейного элемента, и четвертый сумматор, а также датчик ускорения движения подводного робота, установленный на корпусе подводного робота, который подключен ко второму входу первого сумматора, причем второй вход первого блока умножения соединен с входом второго блока выделения модуля, последовательно соединенные третий блок выделения модуля, третий блок умножения, пятый сумматор, второй вход которого подключен к выходу датчика скорости движения подводного робота, установленного на корпусе подводного робота, входу третьего блока выделения модуля и второму входу третьего сумматора, шестой сумматор, второй вход которого соединен с выходом четвертого блока умножения, пятый блок умножения, седьмой сумматор, усилитель, двигатель и винт жестко связанный с валом двигателя, а также последовательно соединенные датчик скорости вращения вала двигателя, установленный на этом валу, четвертый блок выделения модуля, восьмой сумматор, шестой блок умножения, девятый сумматор, первый нелинейный элемент, второй нелинейный элемент, вход которого подключен ко второму входу четвертого блока умножения, первый блок деления, второй вход которого соединен с выходом десятого сумматора, первый вход которого подключен к выходу пятого сумматора и через квадратор - ко второму входу девятого сумматора, седьмой блок умножения, второй вход которого соединен с выходом четвертого блока выделения модуля, вторым входом пятого блока умножения и первым входом восьмого блока умножения, выход которого подключен ко второму входу седьмого сумматора, одиннадцатый сумматор, второй вход которого соединен с выходом шестого сумматора, а третий вход - с третьим входом шестого сумматора, вторым входом десятого сумматора, вторым входом восьмого блока умножения и выходом восьмого сумматора, девятый блок умножения, второй вход которого подключен ко второму входу четвертого блока умножения, второму входу третьего блока умножения и через третий релейный элемент - к выходу датчика скорости вращения вала двигателя, третьему входу седьмого сумматора, четвертому входу одиннадцатого сумматора, второму входу восьмого сумматора, второму входу шестого блока умножения и третьему входу пятого сумматора 19, третий нелинейный элемент, второй блок деления, выход которого соединен с четвертым входом седьмого сумматора, а второй вход - с выходом двенадцатого сумматора, первый вход которого подключен к выходу четвертого сумматора, а второй вход - к выходу пятого блока умножения и второму входу четвертого сумматора.
Сопоставительный анализ отличительных признаков предлагаемого технического решения с существенными признаками аналога и прототипа свидетельствуют о его соответствии критерию "новизна". При этом отличительные признаки формулы изобретения обеспечивают уменьшение времени обнуления ошибки в системе управления скоростью движения подводного робота в условиях неопределенности параметров вязкой среды.
Изобретение поясняется чертежом, на котором представлена блок-схема предлагаемой адаптивной системы управления с переменной структурой для управления скоростью движения подводного робота.
На чертеже введены следующие обозначения:
vd - задающий сигнал скорости движения подводного робота;
v - скорость движения подводного робота относительно водной среды по соответствующей степени свободы; - ускорение движения подводного робота;
- ускорение движения подводного робота;
е - ошибка по скорости движения подводного робота;
s, sτ, D, Δ - промежуточные сигналы;
С - коэффициент наклона линии переключения;
Cmin - минимальное значение коэффициента наклона линии переключения;
μ - постоянная составляющая разрывного сигнала управления (параметр скольжения);
μmax - максимальное значение параметра скольжения;
τd - задающий сигнал упора движителя;
Т - упор, развиваемый винтом 27 движителя подводного робота;
ε - ошибка внутреннего контура управления движителем (разность между задаваемой и реальной силой тяги);
ω - угловая скорость вращения вала двигателя 26;
u* - усиливаемый сигнал;
u - сигнал управления двигателем 26.
Адаптивная система с переменной структурой для управления скоростью движения подводного робота содержит последовательно соединенные первый блок 1 умножения, первый сумматор 2, первый релейный элемент 3, фильтр 4, блок 5 выделения модуля, измеритель 6 рассогласования, ключ 7, второй вход которого через второй релейный элемент 8 подсоединен к выходу первого блока 5 выделения модуля, интегратор 9, второй 10 сумматор, второй вход которого соединен с выходом источника 11 эталонного сигнала и вторым входом первого измерителя 6 рассогласования, а его выход соединен с первым входом первого блока 1 умножения, последовательно соединенные третий сумматор 12, первый вход которого соединен со входом системы, второй блок 13 выделения модуля, второй блок 14 умножения, второй вход которого соединен с выходом первого релейного элемента 3, и четвертый сумматор 15, а также датчик ускорения 16 движения подводного робота, установленный на корпусе подводного робота, который подключен ко второму входу первого сумматора 2, причем второй вход первого блока 1 умножения соединен со входом второго блока 13 выделения модуля, последовательно соединенные третий блок 17 выделения модуля, третий блок 18 умножения, пятый сумматор 19, второй вход которого подключен к выходу датчика 20 скорости движения подводного робота, установленного на корпусе подводного робота, входу третьего блока 17 выделения модуля и второму входу третьего сумматора 12, шестой сумматор 21, второй вход которого соединен с выходом четвертого блока 22 умножения, пятый блок 23 умножения, седьмой сумматор 24, усилитель 25, двигатель 26 и винт 27, жестко связанный с валом двигателя 26, а также последовательно соединенные датчик скорости 28 вращения вала двигателя 26, установленный на этом валу, четвертый блок 29 выделения модуля, восьмой сумматор 30, шестой блок 31 умножения, девятый сумматор 32, первый нелинейный элемент 33, второй нелинейный элемент 34, вход которого подключен ко второму входу четвертого блока умножения 22, первый блок деления 35, второй вход которого соединен с выходом десятого сумматора 36, первый вход которого подключен к выходу пятого сумматора 19 и через квадратор 37 - ко второму входу девятого сумматора 32, седьмой блок 38 умножения, второй вход которого соединен с выходом четвертого блока 29 выделения модуля, вторым входом пятого блока 23 умножения и первым входом восьмого блока 39 умножения, выход которого подключен ко второму входу седьмого сумматора 24, одиннадцатый сумматор 40, второй вход которого соединен с выходом шестого сумматора 21, а третий вход - с третьим входом шестого сумматора 21, вторым входом десятого сумматора 36, вторым входом восьмого блока 39 умножения и выходом восьмого сумматора 30, девятый блок 41 умножения, второй вход которого подключен ко второму входу четвертого блока 22 умножения, второму входу третьего блока 18 умножения и через третий релейный элемент 42 - к выходу датчика 28 скорости вращения вала двигателя 26, третьему входу седьмого сумматора 24, четвертому входу одиннадцатого сумматора 40, второму входу восьмого сумматора 30, второму входу шестого блока 31 умножения и третьему входу пятого сумматора 19, третий нелинейный элемент 43, второй блок деления 44, выход которого соединен с четвертым входом седьмого сумматора 24, а второй вход - с выходом двенадцатого сумматора 45, первый вход которого подключен к выходу четвертого сумматора 15, а второй вход - к выходу пятого блока 23 умножения и второму входу четвертого сумматора 15.
Указанная система управления скоростью движения подводного робота представляет собой двухконтурную систему управления. Внутренний контур - это контур управления движителем подводного робота (блоки 17-45 на чертеже), а внешний контур - контур управления скоростью движения подводного робота (блоки 1-16 на чертеже).
Внешний контур управления скоростью движения подводного робота построен на базе адаптивной системы с переменной структурой, в которой организуется скользящий режим работы. Применение указанной системы управления независимо от текущих параметров подводного робота позволяет придать этому роботу робастность (т. е. независимость показателей качества от параметров системы) и динамические свойства, соответствующие дифференциальному уравнению первого порядка. Так как подводный робот является объектом с переменными параметрами, то для уменьшения времени обнуления ошибки по скорости его движения в благоприятных режимах работы в предлагаемой системе применяется самонастройка положения линии скольжения. Эта самонастройка основана на определении параметра скольжения μ, который участвует в формировании закона управления и показывает, как близко линия переключения находится от вырожденной траектории. При этом разработанное устройство управления не требует непосредственного измерения (это измерение часто вообще невозможно) текущих параметров подводного робота.
Устройство работает следующим образом.
Взаимодействие винта 27 с вязкой средой описывается уравнениями вида:
где H1 - гидродинамический шаг винта; Н - геометрический шаг винта; H2 - гидродинамическая поправка на шаг винта; Ft, Fm - обобщенные коэффициенты упора и момента; m - величина, характеризующая профильные потери винта; ρ - плотность окружающей среды; As - площадь диска винта; М - момент на валу движителя.
В качестве двигателя 26 использован электродвигатель постоянного тока, описываемый линейным дифференциальным уравнением первого порядка:
где Jд - момент инерции вращающихся частей движителя с учетом присоединенных моментов инерции; R - сопротивление якорной цепи двигателя; km, kw - коэффициенты момента и противо-ЭДС; ky - коэффициент усиления усилителя мощности.
Датчик 20 скорости установлен на корпусе подводного робота и измеряет скорость v. Выходной сигнал релейного элемента 42 имеет вид:
Uвых42=signω
На выходе блока 18 умножения формируется сигнал |v|•signω. Первый отрицательный вход сумматора 19 (со стороны блока 18) и его второй положительный вход (со стороны датчика 20) имеют коэффициенты усиления 0,25, а третий положительный вход - коэффициент усиления k1, поэтому на выходе сумматора 19 формируется сигнал k1ω+(v-|v|signω/4 = k1ω-vp/2 (vp см. в (1)).
Первый положительный вход сумматора 30 (со стороны блока 29) имеет коэффициент усиления Н2, а его второй положительный вход - коэффициент усиления Н. В результате на выходе сумматора 30 формируется сигнал, равный Hω+H2|ω| = (H+H2signω)ω = H1ω (см. (1)).
Коэффициент усиления первого положительного входа сумматора 32 (со стороны блока 31) равен 2k1, а его второго положительного входа - единице. В результате на выходе этого сумматора формируется сигнал (k1ω-vp/2)2+2H1k1ω2.
Функциональный преобразователь 33 реализует вычисление квадратного корня. Первый и третий положительные, а также второй отрицательный (со стороны блока 22) входы сумматора 21 имеют единичные коэффициенты усиления. Поэтому на его выходе формируется сигнал:
Первый положительный вход сумматора 36 (со стороны сумматора 19) имеет единичный коэффициент усиления, а его второй положительный вход - коэффициент усиления, равный 2. Поэтому на его выходе формируется сигнал (2H1+k1)ω-vp/2. Функциональный преобразователь 34 реализует функцию:
где δ - малая величина, определяемая зоной нечувствительности блока деления и предотвращающая случай деления на 0. В результате на выходе блока 35 деления формируется сигнал
Первый отрицательный (со стороны блока 38) и четвертый положительный (со стороны датчика 28) входы сумматора 40 имеют коэффициенты усиления, равные k1, а второй (со стороны сумматора 21) и третий положительные входы - единичные коэффициенты усиления. В результате на выходе блока 41 умножения формируется сигнал:
Функциональный преобразователь 43 описывается выражением:
и предотвращает возможное деление на 0 в блоке 44 деления.
Первый положительный вход сумматора 45 (со стороны сумматора 15) имеет единичный коэффициент усиления, а его второй отрицательный вход - коэффициент усиления Ft. В результате на его выходе формируется сигнал:
Первый положительный вход сумматора 24 (со стороны блока 23) имеет коэффициент усиления
его второй положительный вход (со стороны блока 39) - коэффициент усиления
третий положительный вход (со стороны датчика 28) - коэффициент усиления kw/ky, а четвертый положительный вход - коэффициент усиления
В результате на выходе сумматора 24 формируется сигнал:
Если полученный сигнал u* (см. (3)) подставить в выражение (2), то дифференциальное уравнение, описывающее динамику движителя с учетом введенной коррекции, будет записываться в виде:
(где Td - желаемая постоянная времени), то есть внутренний контур управления будет иметь постоянные параметры и, следовательно, постоянные динамические свойства.
Сигнал τd является входным для внутреннего контура управления движителем. Он формируется внешним контуром управления скоростью и является его выходом.
Опишем работу этого внешнего контура.
После подачи сигнала vd на вход системы на выходе сумматора 12, первый положительный (со стороны входа устройства) и второй отрицательный входы которого имеют единичные коэффициенты усиления, формируется сигнал е=vd-v.
Поскольку на вход системы подается vd=const, то 
Первый положительный (со стороны блока 1) и второй отрицательный входы сумматора 2 имеют единичные коэффициенты усиления. В результате на его выходе формируется сигнал  На выходе блока 14 умножения формируется сигнал |e|signs. Первый положительный вход (со стороны блока 14) сумматора 15 имеет коэффициент усиления ku1, который выбирается таким, чтобы обеспечить существование устойчивого скользящего режима в системе при любых возможных значениях параметров подводного робота и начальных значениях е, а его второй положительный вход - коэффициент усиления Ft. В результате на выходе сумматора 15 формируется сигнал:
На выходе блока 14 умножения формируется сигнал |e|signs. Первый положительный вход (со стороны блока 14) сумматора 15 имеет коэффициент усиления ku1, который выбирается таким, чтобы обеспечить существование устойчивого скользящего режима в системе при любых возможных значениях параметров подводного робота и начальных значениях е, а его второй положительный вход - коэффициент усиления Ft. В результате на выходе сумматора 15 формируется сигнал:
τd = ku1|e|signs+T. (4)
После преобразования сигнала τd во внутреннем контуре управления движителем (блоки 17-45) на вход двигателя 26 подается сигнал u*, усиленный по мощности в усилителе 25. Вал двигателя 26 начинает вращаться в таком направлении, чтобы винт движителя 27 создавал упор, равный заданному значению τd. Под действием этого упора подводный робот начинает перемещаться. При этом возрастает по модулю значение скорости v и, следовательно, ошибка е начинает уменьшаться по модулю. В какой-то момент времени сигнал s на выходе сумматора 2 меняет знак и происходит переключение релейного элемента 3. Это приводит к тому, что первое слагаемое, входящие в выражение (4), также меняет знак и, следовательно, τd становится меньше по модулю. В результате уменьшается упор, создаваемый винтом движителя, поэтому уменьшается и производная ошибки  После этого сигнал s опять меняет свой знак и происходит переключение релейного элемента 3. Сигнал τd опять возрастет. То есть во внешнем контуре возникает скользящий режим, который приводит к монотонному обнулению ошибки системы e.
После этого сигнал s опять меняет свой знак и происходит переключение релейного элемента 3. Сигнал τd опять возрастет. То есть во внешнем контуре возникает скользящий режим, который приводит к монотонному обнулению ошибки системы e.
Фильтр 4 формирует величину параметра μ, которая определяется формулой:
μ = tu+/(tu++tu-), (5)
где tu+ и tu- - продолжительность промежутков времени, когда выходной сигнал с релейного элемента 3 положителен или отрицателен.
Релейный элемент 8 реализует функцию:
где параметр δμ выбирается близким к единице.
Источник эталонного сигнала 11 выдает сигнал, равный единице.
Первый отрицательный вход измерителя 6 рассогласования (со стороны блока 5) имеет единичный коэффициент усиления, а его второй положительный вход - коэффициент усиления μmax. В результате на его выходе формируется сигнал:
где μmax - максимальное значение параметра скольжения.
Первый положительный вход сумматора 10 (со стороны интегратора 9) имеет единичный коэффициент усиления, а его второй положительный вход - коэффициент усиления Cmin. В результате на его выходе формируется сигнал:
C=C'+Δ (7)
где С' - значение коэффициента наклона линии переключения, при котором будет обеспечиваться максимальная скорость скольжения и существовать скользящий режим при самых неблагоприятных параметрах системы.
Контур самонастройки работает следующим образом.
Внешний контур управления может работать в двух режимах: режиме подхода к линии переключения и режиме переключений (скользящий режим). В первом случае на выходе релейного элемента 3 формируется постоянный сигнал, при этом |μ| =1, сигнал на выходе релейного элемента 8 становится равным 1 и ключ 7 размыкается. Во втором случае на выходе релейного элемента 3 формируется сигнал в виде высокочастотных прямоугольных импульсов, при этом μ, как видно из формулы (5), будет меньше 1, сигнал на выходе релейного элемента 8 становится равным 0 и ключ 7 замыкается.
После замыкания ключа 7 на входе интегратора 9 появляется ненулевой сигнал (6). В результате на выходе интегратора 9 появляется положительная величина Δ (в начале работы Δ=0), которая увеличивает коэффициент наклона линии переключения. Линия переключения приближается к вырожденной траектории, и поэтому величина |μ| увеличивается, приближаясь к μmax. Величина Δ будет увеличиваться до тех пор, пока линия переключения не приблизится к вырожденной траектории настолько, что |μ| сравняется с μmax. При этом значение Δ в контуре самонастройки обеспечивает получение такого наклона линии переключения, при котором гарантируется и существование режима скольжения, и максимальная скорость его протекания при текущих параметрах подводного робота.
Таким образом, предлагаемая система управления позволяет обеспечить самонастройку наклона линии скольжения в вынужденном режиме работы и, следовательно, уменьшить время обнуления ошибки по скорости движения подводного робота в благоприятных условиях.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖИТЕЛЕМ ПОДВОДНОГО РОБОТА | 1999 |
|
RU2147985C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖИТЕЛЕМ ПОДВОДНОГО РОБОТА | 2000 |
|
RU2191106C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖИТЕЛЕМ ПОДВОДНОГО РОБОТА | 1999 |
|
RU2147001C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОДВОДНЫМ РОБОТОМ | 2003 |
|
RU2230654C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖИТЕЛЕМ ПОДВОДНОГО РОБОТА | 2001 |
|
RU2209718C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2003 |
|
RU2235015C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2003 |
|
RU2235014C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2003 |
|
RU2235016C1 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 1999 |
|
RU2146999C1 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 1999 |
|
RU2147000C1 |
Изобретение относится к робототехнике и используется для создания системы управления скоростью движения подводного робота. Технический результат - обеспечение самонастройки системы и уменьшение времени обнуления ошибки в благоприятных режимах работы за счет введения дополнительных сигналов, компенсирующих влияние гидродинамических сил вязкого трения. Для формирования дополнительных сигналов введены девять сумматоров, восемь блоков умножения, два блока деления, три блока выделения модуля, три функциональных преобразователя, квадратор, релейный элемент, датчик ускорения, датчик скорости движения робота, датчик скорости вращения вала, усилитель и двигатель, определенным образом соединенные между собой. 1 ил.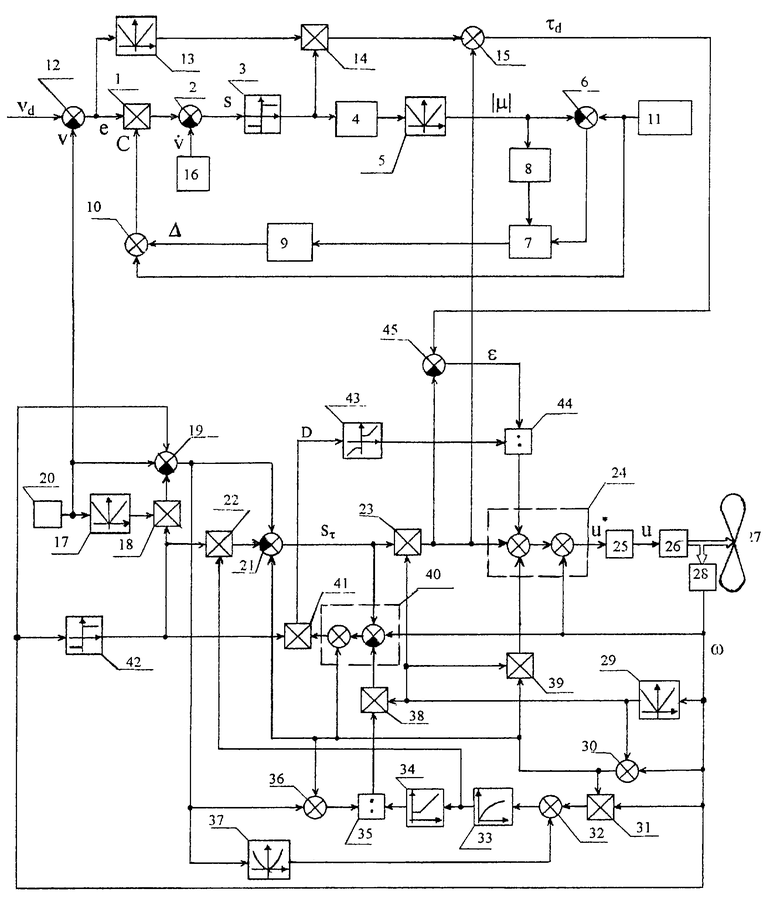
Адаптивная система с переменной структурой для управления скоростью движения подводного робота, содержащая последовательно соединенные первый блок умножения, первый сумматор, первый релейный элемент, фильтр, блок выделения модуля, измеритель рассогласования, ключ, второй вход которого через второй релейный элемент подсоединен к выходу первого блока выделения модуля, интегратор, второй сумматор, второй вход которого соединен с выходом источника эталонного сигнала и вторым входом первого измерителя рассогласования, а его выход соединен с первым входом первого блока умножения, отличающаяся тем, что в нее дополнительно введены последовательно соединенные третий сумматор, первый вход которого соединен со входом системы, второй блок выделения модуля, второй блок умножения, второй вход которого соединен с выходом первого релейного элемента, и четвертый сумматор, а также датчик ускорения движения подводного робота, установленный на корпусе подводного робота, который подключен ко второму входу первого сумматора, причем второй вход первого блока умножения соединен со входом второго блока выделения модуля, последовательно соединенные третий блок выделения модуля, третий блок умножения, пятый сумматор, второй вход которого подключен к выходу датчика скорости движения подводного робота, установленного на корпусе подводного робота, входу третьего блока выделения модуля и второму входу третьего сумматора, шестой сумматор, второй вход которого соединен с выходом четвертого блока умножения, пятый блок умножения, седьмой сумматор, усилитель, двигатель и винт, жестко связанный с валом двигателя, а также последовательно соединенные датчик скорости вращения вала двигателя, установленный на этом валу, четвертый блок выделения модуля, восьмой сумматор, шестой блок умножения, девятый сумматор, первый нелинейный элемент, второй нелинейный элемент, вход которого подключен ко второму входу четвертого блока умножения, первый блок деления, второй вход которого соединен с выходом десятого сумматора, первый вход которого подключен к выходу пятого сумматора и через квадратор - ко второму входу девятого сумматора, седьмой блок умножения, второй вход которого соединен с выходом четвертого блока выделения модуля, вторым входом пятого блока умножения и первым входом восьмого блока умножения, выход которого подключен ко второму входу седьмого сумматора, одиннадцатый сумматор, второй вход которого соединен с выходом шестого сумматора, а третий вход - с третьим входом шестого сумматора, вторым входом десятого сумматора, вторым входом восьмого блока умножения и выходом восьмого сумматора, девятый блок умножения, второй вход которого подключен ко второму входу четвертого блока умножения, второму входу третьего блока умножения и через третий релейный элемент - к выходу датчика скорости вращения вала двигателя, третьему входу седьмого сумматора, четвертому входу одиннадцатого сумматора, второму входу восьмого сумматора, второму входу шестого блока умножения и третьему входу пятого сумматора, третий нелинейный элемент, второй блок деления, выход которого соединен с четвертым входом седьмого сумматора, а второй вход - с выходом двенадцатого сумматора, первый вход которого подключен к выходу четвертого сумматора, а второй вход - к выходу пятого блока умножения и второму входу четвертого сумматора.
| Релейная адаптивная система | 1988 |
|
SU1571548A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖИТЕЛЕМ ПОДВОДНОГО РОБОТА | 1999 |
|
RU2147985C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 1992 |
|
RU2028930C1 |
| Способ получения из виноградных семян масла и энотаннина | 1950 |
|
SU91663A1 |
| US 4790718 А, 13.12.1988. | |||

