Изобретение относится к скважинным методам изучения ядерно-магнитных и магнитных свойств горных пород.
Известен способ проверки каротажных сигналов, полученных с помощью ядерного магнитного резонанса (пат. США N 3484680, кл. G 01 N 27/00, приор. 25.05.67, публ. 16.12.69), согласно которому в скважинный прибор ядерного магнитного каротажа (ЯМК) помещается протонный образец, который служит для обнаружения ферромагнитных частиц в ближайшем слое породы. Если из окружающей породы не поступает сигнала ядерной индукции, но такой сигнал поступает от протонного образца, то в породе могут присутствовать ферромагнитные частицы, неоднородное магнитное поле которых способно подавить резонансный сигнал свободных флюидов породы. Недостатком способа являются невозможность количественной оценки магнитных свойств пород и одновременного изучения ядерно-магнитных и магнитных свойств, а также отсутствие возможности уменьшения или исключения влияния ферромагнитных включений породы на сигналы ядерной индукции свободных флюидов.
Известен также способ каротажа буровых скважин с использованием эффекта ядерного-магнитного резонанса (пат. США N 3775671, кл. G 01 N 27/78, приор. 3.07.72, публ. 27.11.73), в соответствии с которым для снижения влияния магнитных минералов, находящихся в горных породах, на сигналы ядерной индукции свободных флюидов предлагается перед поляризацией пропускать через катушку зонда ток обратного направления в течение определенного времени. Недостатком способа является невозможность одновременного изучения ядерно-магнитных и магнитных свойств горных пород.
Наиболее близким к предлагаемому является способ, положенный в основу работы устройства для ядерного магнитного каротажа (а.с. СССР N 441541, кл. G 01 V 3/14, приор. 15.12.72, публ. 30.08.74) и заключающийся в использовании однокатушечного зонда для определения ядерно-магнитных свойств пород и тороидального датчика ядерной индукции, заполненного водородсодержащей жидкостью и используемого для эталонировки аппаратуры. Способ включает поляризацию пород постоянным магнитным полем, выключение поля и измерение амплитуды сигнала ядерной индукции ядер водорода в свободном флюиде породы, возбуждение и измерение аналогичным образом ядерной индукции от водородсодержащего образца с тороидальной обмоткой, индуктивно не связанной с окружающими скважину породами. Недостатком способа является невозможность непрерывного последовательного проведения комплексного измерения ядерно-магнитных и магнитных свойств пород.
Кроме того, для всех перечисленных способов измерения ядерно-магнитных свойств пород характерна низкая помехозащищенность в условиях интенсивных помех и шумов, что приводит к понижению точности измерений.
В известных способах измерения параметров сигнала ядерной индукции свободного флюида горных пород используется процедура непосредственного измерения параметров сигнала во временной области. Суть этой процедуры сводится к следующему. После выключения тока поляризации через рамку зонда ядерного магнитного каротажа в последней возникает ЭДС, наведенная свободно прецессирующими магнитными моментами протонов, имеющихся в поровой жидкости пород, пересеченных скважиной. В идеальном случае наведенный в рамке сигнал ядерной индукции имеет вид (Аксельрод С.М., Неретин В.Д. Ядерный магнитный резонанс в нефтегазовой геологии и геофизике - М.: Недра, 1990, с. 15):
где Uo - начальная амплитуда сигнала,
T*2 - приведенное время поперечной релаксации,
ω = γB - круговая частота магнитного резонанса,
γ = гиромагнитное отношение протона,
B - индукция магнитного поля в скважине в объеме действия рамки зонда ЯМК.
Начальная амплитуда сигнала Uo пропорциональна числу протонов, создающих сигнал, т.е. пропорциональна индексу свободного флюида (ИСФ) или эффективной пористости пород. Как видно из выражения (1), U = Uo при t = 0, т.е. непосредственно измеряя начальную амплитуду, можно было бы получить информацию об ИСФ. Но в реальном устройстве для ЯМК сразу же после подачи команды на выключение тока поляризации в рамке ЯМК возникают переходные процессы выключения тока, там же могут появиться помехи, связанные с переключением рамки с процесса поляризации на прием слабых сигналов вида (1). Как правило, рамка для зонда ЯМК в режиме приемника указанных сигналов является контуром, настраиваемым в резонанс с частотой ω. В силу довольно высокой добротности контура происходит затягивание процесса установления колебаний в нем. Перечисленные выше явления приводят к тому, что форма полезного сигнала резко отличается от идеального случая (1), что не позволяет судить о величине Uo непосредственным ее измерением при t ≅ 0.
Из временных диаграмм основных процессов, протекающих при проведении ЯМК (фиг. 1), видно, что в момент времени tn начинается отключение тока поляризации в рамке ЯМК (фиг. 1.I), а через интервал времени tm, называемый мертвым временем, катушка работает в режиме приема сигнала свободной прецесси, ЭДС которого представлена на фиг. 1. II. Затягивание сигнала в резонансных цепях приемника приводит к тому, что реальная форма сигнала имеет вид, представленный на фиг. 1. III. Реально для известных зондов ЯМК величина tm составляет от 15 до 30 мс. При временах приведенной поперечной релаксации нефтей порядка 50-80 мс наблюдаемый сигнал может потерять до 50% своей первоначальной величины. ЭДС сигнала свободной прецессии в лучшем случае составляет единицы микровольт, а тепловые шумы рамки и усилителя - около 0,5 мкВ. Кроме того, на входе присутствуют помехи с весьма широкой полосой частот, дополнительно ухудшающие условия приема малых сигналов и измерение их параметров. Поэтому для улучшения помехозащищенности приемного тракта используется узкополосная фильтрация сигнала путем настройки в резонанс рамки ЯМК и элементов, определяющих полосу пропускания приемника. Узкополосная фильтрация сигнала в известных устройствах его обработки производится высокодобротными (Q ≅ 100-180) перестраиваемыми аналоговыми фильтрами, искажающими форму сигнала. Причем требуется перестройка этих фильтров в зависимости от индукции магнитного поля Земли и в скважинном приборе (входной контур), и на поверхности (блок обработки). Искажения формы сигнала тем больше, чем уже полоса пропускания приемного тракта. Таким образом, выделение слабых сигналов с помощью узкополосной фильтрации ведет к снижению точности определения параметров полезного сигнала, особенно в условиях сильных помех и шумов.
Для борьбы с сетевыми помехами и увеличения отношения сигнал/шум используется интегрирование отрезков огибающей сигнала (1) в определенные моменты времени t1 и t2 (фиг. 1. IV). При этом время интегрирования tи выбирается кратным периоду сетевой помехи.
Таким образом, в результате приема, усиления, детектирования и интегрирования определенных участков огибающей сигнала регистрируются средние значения сигнала U1 и U2, приписываемые соответственно средним временам их существования t1 и t2. Для определения искомого значения Uo и времени релаксации Т*2 достаточно решить систему уравнений
откуда
Решение исходной задачи в виде выражений (3) требует высокой точности определения амплитуд U1 и U2 в заданные интервалы времени t1 и t2.
Как правило, t1 ≥ (60 - 70) мс и t2 ≥ (90 - 100) мс. Для быстро затухающих сигналов (T*2 ≥ 60 мс) регистрируемые в эти времена значения U1 и U2 составляют соответственно 37% и 22% от первоначальной искомой амплитуды Uo, и в условиях интенсивных помех и шумов при отношении сигнал/шум менее 3 погрешность определения параметров по выражению (3) становится более 20%, а результаты наблюдений носят качественный характер. Известный способ борьбы с этим недостатком заключается в попытке проведения измерений сигнала в более ранние времена наблюдения t1 и t2, но они недоступны из-за конечных (и не малых!) значений tм и реакции приемного контура рамки ЯМК.
Помимо рассмотренных технических ограничений возможности определения параметров сигнала по стандартной процедуре существует известное физическое ограничение метода наблюдения сигнала свободной прецессии, связанное специфической зависимостью параметра T*2 от неоднородности индукции ΔB магнитного поля в объеме действия датчика ЯМК (там же, с.9).
Известно, что
где T2 - истинное время поперечной релаксации, не зависящее от магнитного поля.
Условие (4) приводит к тому, что в случае высокой неоднородности ΔB поля в объеме датчика время T*2 становится весьма малым, а сигнал затухает так быстро, что становится ненаблюдаемой величиной. Быстрое затухание сигнала происходит потому, что в разных частях исследуемого датчиком пространства прецессия протонов происходит с различной частотой и фазой, что приводит к разрушению ансамбля ядерных спинов, суммарный магнитный момент которых очень быстро стремится к нулю.
В то же время величина T2 определяется характером спин-спинового взаимодействия, а ее значение тесно связано с размером пор, содержащих резонирующее вещество. Поэтому корректное измерение значений T*2 и ΔB позволило бы с помощью (4) судить об истинном времени релаксации T2, свободном от влияния неоднородности поля.
В реальных условиях скважины неоднородность поля может быть связана с техногенным нарушением магнитных минералов (появлением нестабильной компоненты намагниченности стенок скважины), приобретенным в процессе бурения. В процессе бурения скважины наблюдается нарушение магнитной сплошности среды горной породы и баро-термическое воздействие бурового инструмента на магнитные зерна ферромагнитных минералов в стенках скважины. Вследствие этого повышается неоднородность магнитного поля пород, слагающих стенки скважины, что создает существенную помеху для применения метода ЯМК: снижается точность определения ИСФ. Определение вышеуказанной характеристики происходит на фоне магнитовозмущенного состояния среды, что физически некорректно.
Из изложенного видно, что недостатком известного технического решения является невозможность обеспечения требуемой точности комплексных измерений ядерно-магнитных и магнитных свойств флюидов горных пород в условиях повышенного уровня электромагнитных помех и шумов, а также в условиях техногенных нарушений магнитной сплошности горной породы в процессе бурения скважины.
Ставится задача создания помехозащищенного способа комплексного измерения ядерно-магнитных и магнитных свойств пород.
Задача решается за счет того, что в способе измерения ядерно-магнитных свойств пород в скважинах, включающем поляризацию постоянным магнитным полем окружающих скважину пород, последующее выключение этого поля и измерение амплитуды сигнала индукции ядер водорода в свободном флюиде породы, возбуждение и измерение аналогичным образом сигнала ядерной индукции от водородсодержащего вещества, в котором размещена тороидальная обмотка, индуктивно не связанная с окружающими скважину породами, в каждой точке разреза последовательно возбуждают сигнал ядерной индукции от водородсодержащего вещества и измеряют его частоту, затем производят поляризацию окружающих пород, подвергают принятый сигнал индукции от ядер водорода свободного флюида прямому преобразованию Фурье, измеряют амплитуду и ширину спектральной линии протонного резонанса, по которым судят об индексе свободного флюида и приведенном времени поперечной релаксации, после чего производят повторное возбуждение сигнала ядерной индукции от водородсодержащего вещества и измеряют его частоту, сравнивают частоты сигналов ядерной индукции и по соотношению частот при первом и третьем измерениях судят об индукции магнитного поля в скважине до и после поляризации, а по их разности судят об остаточной намагниченности пород, а также об истинном времени поперечной релаксации свободного флюида, причем все указанные измерения производят в одной и той же точке пространства.
Кроме того, дополнительное повышение точности может быть достигнуто за счет того, что перед поляризацией постоянным магнитным полем выполняют обработку пород стенок скважины переменным магнитным полем с убывающей амплитудой.
В результате преобразования Фурье исходный сигнал переводится из временного в частотное представление, что позволяет применить эффективную цифровую фильтрацию сигнала и измерить амплитуду и ширину спектральной линии протонного резонанса, по которым без обратного преобразования во временное представление судят об ИСФ и времени поперечной релаксации, причем для корректного измерения последней используют данные о разности частот при первом и третьем измерениях сигнала.
Магнитная обработка пород стенок скважины переменным магнитным полем убывающей амплитуды, проводимая перед поляризацией постоянным магнитным полем, позволяет провести размагничивание нестабильной компоненты намагниченности стенок скважины, что приводит к уменьшению неоднородности поля в ближайшей к датчику зоне. Уменьшение неоднородности поля увеличивает T*2, снимает дополнительное уширение спектральной линии протонного резонанса и увеличивает отношение сигнал/шум, что приводит к увеличению точности определения ядерно-магнитных и магнитных свойств пород в скважинах.
В результате измерений в одной и той же точке разреза скважины определяются: индукция магнитного поля до, во время и после измерения ядерно-магнитных свойств окружающей среды, степень неоднородности поля, ИСФ и время поперечной релаксации, а также начальная и остаточная намагниченность пород стенок скважины.
Использование при измерениях водородсодержащего образца в сочетании с тороидальным датчиком, ранее использовавшихся для измерения амплитуды сигналов ядерной индукции, позволило создать малогабаритный помехоустойчивый датчик поля, измеряющий модуль вектора магнитной индукции по частоте ядерного магнитного резонанса. Размещение двух таких датчиков выше и ниже датчика ЯМК позволяет в предложенном способе оценивать, с одной стороны, неоднородность поля в объеме рамки датчика ЯМК, а с другой, - индукцию поля до и после измерения ядерно-магнитных свойств среды, что, в свою очередь, позволяет оценить начальную и наведенную намагниченность стенок скважины.
В предлагаемом решении способ искусственного обратного намагничивания пород для снижения влияния магнитных минералов на сигнал ядерной индукции трансформировался в предложение о более эффективной обработке пород стенок скважины переменным магнитным полем с убывающей амплитудой, что повышает точность измерения не только ядерно-магнитных, но и магнитных свойств пород.
Таким образом, использование ряда известных технических решений и принципиально отличного от известных способа обработки сигнала ЯМК позволило осуществить помехозащищенный способ комплексных измерений ядерно-магнитных и магнитных свойств горных пород в скважинах.
На фиг. 1 приведены временные диаграммы процессов, протекающих при общепринятой процедуре проведения ЯМК: I - изменение тока поляризации; II - ЭДС сигнала свободной прецессии; III - форма усиленного сигнала свободной прецессии; IV - огибающая продетектированного сигнала.
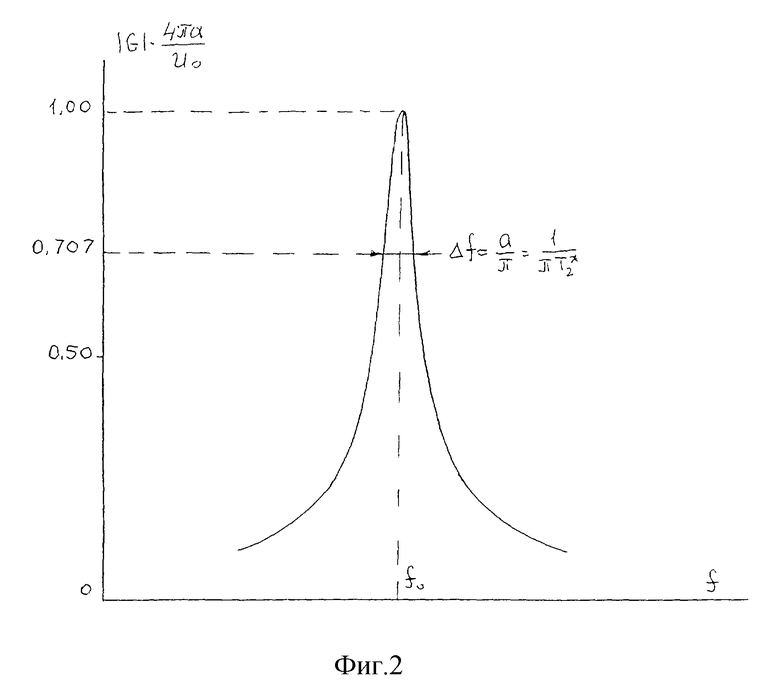
На фиг. 2 приведена типичная спектральная линия протонного резонанса.
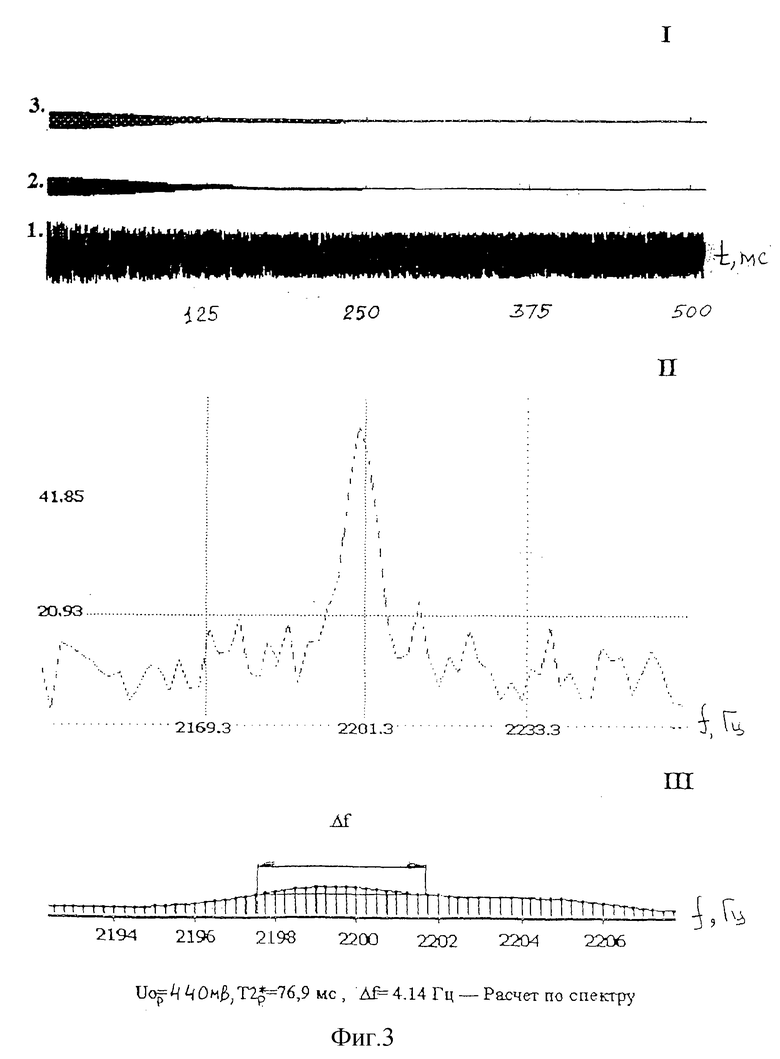
На фиг. 3 приведен пример временного (I) и частотного (II) представлений сигнала ЯМК с детализацией (III) участка спектра. Временное представление изображено тремя графиками: 1 - исходный сигнал ЯМК; 2 - обратное косинус-преобразование сигнала 1; 3 - обратное полное преобразование сигнала 1 в полосе свертки 10 Гц.
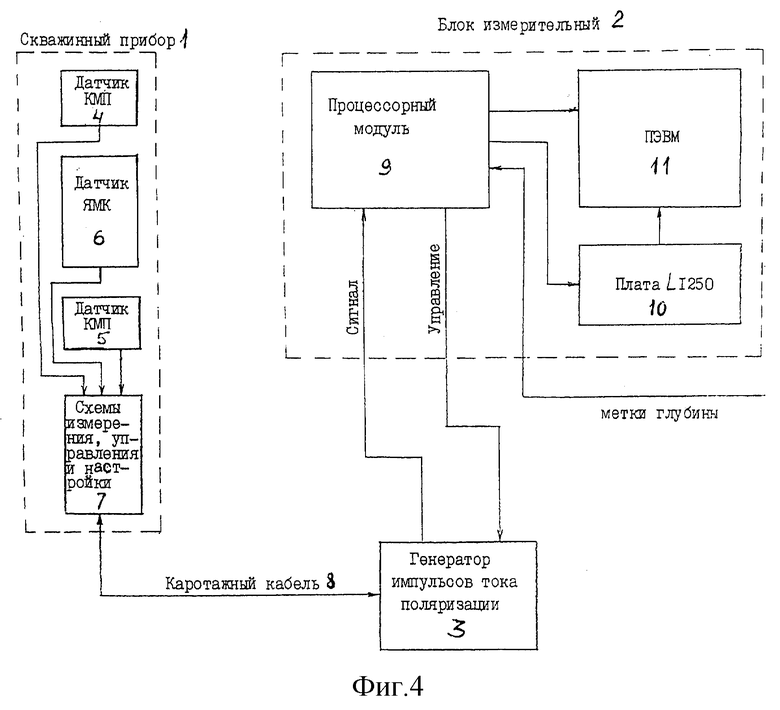
На фиг. 4 приведена структурная схема устройства для измерения ядерно-магнитных и магнитных свойств пород стенок скважины.
Способ реализуется при каротаже на подъеме скважинного прибора. Для этого необходимо произвести следующие операции.
1. В данной точке измерения возбуждают и регистрируют сигнал ядерной индукции, вызванный прецессией протонов жидкости в первом тороидальном датчике. По частоте прецессии определяется индукция магнитного поля в скважине.
2. В ту же точку по стволу скважины перемещают рамку датчика ЯМК, расположенную в скважинном приборе ниже первого тороидального датчика.
3. Производят поляризацию постоянным магнитным полем окружающей скважину среды и возбуждают сигналы ядерной индукции свободного флюида. Принятый сигнал подвергают прямому преобразованию Фурье и по его спектру определяют начальную амплитуду сигнала и приведенное время поперечной релаксации.
4. В ту же точку по стволу скважины перемещают второй тороидальный датчик, расположенный в скважинном приборе ниже рамки датчика ЯМК.
5. Возбуждают и измеряют сигнал ядерной индукции протонов жидкости во втором тороидальном датчике, что позволяет определить индукцию поля в скважине в той же точке пространства, где проводились предыдущие измерения.
6. По результатам измерений по пп. 1,3,5 определяют ИСФ (по начальной амплитуде сигнала), время поперечной релаксации (по времени приведенной поперечной релаксации и измеренной неоднородности магнитного поля с использованием формулы (4)), а также начальную и наведенную остаточную намагниченность пород стенок скважины.
Для того, чтобы измерения по пп. 1,3,5 производились в одной точке, необходимо согласовать расстояния между датчиками, время измерения и скорость каротажа.
Эффективность предлагаемого способа заключается в том, что он построен на использовании конкретного вида Фурье-спектра сигнала свободной прецессии. Нетрудно показать, что для сигнала свободной прецессии, представленного функцией U(t) в соответствии с выражением (1), комплексный Фурье-спектр G(ω) имеет вид
где
а энергетический спектр имеет вид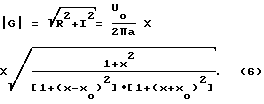
График спектра  представлен на фиг. 2. Кривая магнитного резонанса имеет колоколообразную форму, вершина которой
представлен на фиг. 2. Кривая магнитного резонанса имеет колоколообразную форму, вершина которой  имеет координату
имеет координату  а ширина линии Δf по уровню 0,707 от максимума равна
а ширина линии Δf по уровню 0,707 от максимума равна  Таким образом, непосредственно по спектру сигнала
Таким образом, непосредственно по спектру сигнала  можно определить U0 и T*2:
можно определить U0 и T*2:
Магнитный резонанс обладает достаточно узкой спектральной линией с шириной  которая при 40 мс ≤ T2 ≤ 160 мс лежит в пределах 2 Гц ≤ Δf ≤ 8 Гц. При средней частоте сигнала fo≅ 2,3 кГц и T
которая при 40 мс ≤ T2 ≤ 160 мс лежит в пределах 2 Гц ≤ Δf ≤ 8 Гц. При средней частоте сигнала fo≅ 2,3 кГц и T
Действительно, резонансная частота свободной прецесии флюида ωo= 2πfo достаточно точно определена по данным первого измерения сигнала тороидального датчика, форма сигнала также apriori известна (выражение (6)). Достаточно выделить из всего спектра смеси сигнала с помехами и шумами очень узкую полосу около fo и определить параметры Uo и T*2 по выражениям (7).
Для этого необходимо изменить общепринятую процедуру измерения сигнала путем введения специализированного аналого-цифрового преобразователя (АЦП) и использования прямого преобразования Фурье. Усиленный сигнал свободной прецессии длительностью Т поступает на вход быстродействующего программно-управляемого АЦП, имеющего время дискретизации Δt. На выходе АЦП получим цифровую последовательность Uk(tk), где  N - число записанных точек сигнала, k = 0, 1, 2 ... N-1. С помощью процедуры быстрого преобразования Фурье (БПФ) получаем дискретный спектр исходного сигнала, причем шаг по частоте равен 1/Т. Например, при длительности наблюдения сигнала свободной прецессии Т = 500 мс шаг в частотном представлении спектра составляет 2 Гц. Процедуры вычисления и регистрации спектра сигнала свободной прецессии существенно упрощаются, т. к. требуется вычисление и запись не полного спектра принятого аппаратурой сообщения, а лишь узкой полосы около частоты fo ожидаемого протонного резонанса. Вычисленная гребенка амплитуд спектральных составляющих в окрестности резонанса используется для определения Uo и Т*2 по формуле (7). Для более точного определения ширины спектральной линии, особенно для Т*2 > 100 мс, можно воспользоваться интерполяционными формулами и сгустить сеть спектральных составляющих.
N - число записанных точек сигнала, k = 0, 1, 2 ... N-1. С помощью процедуры быстрого преобразования Фурье (БПФ) получаем дискретный спектр исходного сигнала, причем шаг по частоте равен 1/Т. Например, при длительности наблюдения сигнала свободной прецессии Т = 500 мс шаг в частотном представлении спектра составляет 2 Гц. Процедуры вычисления и регистрации спектра сигнала свободной прецессии существенно упрощаются, т. к. требуется вычисление и запись не полного спектра принятого аппаратурой сообщения, а лишь узкой полосы около частоты fo ожидаемого протонного резонанса. Вычисленная гребенка амплитуд спектральных составляющих в окрестности резонанса используется для определения Uo и Т*2 по формуле (7). Для более точного определения ширины спектральной линии, особенно для Т*2 > 100 мс, можно воспользоваться интерполяционными формулами и сгустить сеть спектральных составляющих.
Известный характер спектра (6) с квадратичным спадом начального участка резонансной кривой позволяет получить наиболее высокую точность при квадратичной интерполяции  Так, для выше рассмотренного примера с шагом БПФ, равным 2 Гц, возможно сгущение сети спектральных составляющих через 0,25 Гц, что позволяет вычислить ширину полосы с точностью 0,005 Гц. Нами было установлено, что с требуемой для эксперимента точностью в 10% достаточно применить БПФ с N=8192, чтобы вычислять параметры Uo и T*2 в реальном масштабе времени (время вычисления tв ≤ 0,8 с) и в условиях сильных помех.
Так, для выше рассмотренного примера с шагом БПФ, равным 2 Гц, возможно сгущение сети спектральных составляющих через 0,25 Гц, что позволяет вычислить ширину полосы с точностью 0,005 Гц. Нами было установлено, что с требуемой для эксперимента точностью в 10% достаточно применить БПФ с N=8192, чтобы вычислять параметры Uo и T*2 в реальном масштабе времени (время вычисления tв ≤ 0,8 с) и в условиях сильных помех.
Осуществляемая таким образом узкополосная цифровая фильтрация существенно отличается от аналоговой, используемой в стандартной процедуре известного способа: в нашем случае достаточно прямого перехода из временного представления сигнала в частотное для определения его искомых параметров, что не меняет характера принятого сообщения. При аналоговой фильтрации анализируемый после фильтра сигнал принципиально отличается от исходного из-за искажения формы.
Имеется существенное отличие также в виде регистрируемого первичного материала. В стандартном ЯМК производится регистрация нескольких (например, двух) проинтегрированных участков огибающей сигнала свободной прецессии, по которым в дальнейшем вычисляют Uo и T*2. В предлагаемом "частотном" способе помимо прямых определений Uo и T*2, выполняемых в реальном масштабе времени, имеется возможность записи небольшого интервала спектра, включающего полезный сигнал с помехами и шумами, по которому при анализе данных каротажа можно восстановить временное представление сигнала в любой точке записанного спектра. Такая возможность представляется исключительно полезной в случае, когда в непосредственной близости по частоте от полезного сигнала имеется помеха, например гармоника питающей сети. В этом случае с помощью процедуры обратного БПФ можно провести свертку записанного сообщения на заданной частоте и по характеру временного представления полученного сигнала судить о его происхождении.
Проиллюстрируем вышеизложенное данными фиг. 3. Сигнал ЯМК был смоделирован в виде суммы полезного сигнала и случайной помехи по формуле
где Uo = 400 мВ, Т*2 = 80 мс, fo = 2200 Гц, Us = 1600 мВ,
rad - функция генератора случайных чисел от 0 до 1.
График S(t) представлен на фиг. 3.I.1. Выбранные значения параметров сигнала соответствуют примерно ИСФ ≅ 20% при верхнем пределе отношения сигнал/шум, оцениваемом выражением
С/Ш=0,5e-t/100, (9)
где t - текущее время, мс.
Из (9) видно, что отношение сигнал/шум не превышает 0,5, а при "стандартном" для ЯМК времени наблюдения tн = 100 мс С/Ш составляет всего около 0,18.
Несмотря на столь жесткие условия по помехо-сигнальной обстановке, был рассчитан спектр сигнала (8), представленный на фиг. 3.II с шагом по частоте 2 Гц в диапазоне fo ± 64 Гц, а на фиг. 3.III приведен участок спектра полезного сигнала fo ± 8 Гц, детализированный с шагом 0,25 Гц. По данным фиг. 3. III были рассчитаны параметры исходного сигнала: Uop = 440 мВ и Т2p = 76,9 мс. Погрешность определения Uo равна 10%, а Т*2 - 3,9%. Для справки: при стандартной процедуре измерения параметров сигнала корректными считаются измерения при отношении С/Ш > 3. На фиг. 3.I.2 и 3.III.3 представлены соответственно обратные косинус-преобразование и полное преобразование сигнала при полосе свертки 10 Гц, т.е. результаты цифровой фильтрации исходного сигнала в узкой полосе частот.
Сравнение временного (фиг. 3.I.1) и частотного (фиг. 3.II) представлений одного и того же сигнала ЯМК показывает, что в частотном представлении отношение сигнал/шум в несколько раз выше, чем во временном, что позволяет существенно повысить точность определения ИСФ и Т*2 в условиях слабых сигналов и сильных помех.
При этом повышенная точность измерения Т*2 и прецизионное измерение ΔB с помощью двух тороидальных датчиков открывает возможность измерения Т1 - истинного времени поперечной релаксации, не зависящего от магнитного поля (см. выражение (4)).
Помимо очевидной практической эффективности предложенного частотного способа измерения ядерно-магнитных и магнитных свойств пород в скважинах существует и дополнительное техническое преимущество использования этого способа. При частотном представлении сигнала узкополосная фильтрация осуществляется цифровым способом, а при фильтрации во временном представлении - аналоговыми устройствами высокой добротности. В последнем случае на точность определения параметра сильно влияет нестабильность элементов частото-задающих цепей, что является дополнительным источником погрешности метода, который устраняется при использовании предлагаемого способа.
Предлагаемый способ измерения реализован в экспериментальном образце комплексной аппаратуры ядерно-магнитного каротажа и каротажа магнитного поля (ЯМК-КМП) для нефтяных скважин, разработанном в ВИРГ-Рудгеофизика в 1998 г. Структурная схема аппаратуры ЯМК-КМП изображена на фиг. 4. В состав аппаратуры входят скважинный прибор 1, блок измерения 2 и генератор импульсов тока поляризации 3. Скважинный прибор содержит датчики каротажа магнитного поля 4 и 5, датчик ЯМК 6, схему измерения, управления и настройки 7. Скважинный прибор 1 связан с наземной аппаратурой каротажным кабелем 8. В состав измерительного блока 2 входят процессорный модуль 9, плата АЦП 10 и ПЭВМ 11. Датчики 4 и 5 заполнены керосином.
Аппаратура работает следующим образом. Импульсы тока поляризации от генератора 3 по кабелю 8 поступают в скважинный прибор 1, где последовательно во времени подаются на датчики 4, 5 и 6. Возникающий сигнал ядерной индукции с каждого из датчиков поступает на схему 7, где происходит его прием и усиление. Сигнал в аналоговом виде по кабелю 8 поступает в процессорный модуль 9, где происходит его первичная обработка. Так, сигналы датчиков 4 и 5 используются для измерения частоты резонанса f0, по которой определяют модуль вектора геомагнитной индукции, соответственно B1 и В2. Эти же данные о частоте используются для настройки входного контура рамки ЯМК 6 и для выбора частотного диапазона f0±F при БПФ, как, например, для спектра сигнала на фиг. 3. II, где F = 64 Гц и f0 = 2200 Гц. Сигнал датчика ЯМК после его предварительной обработки в схеме 7 и в модуле 9 поступает на АЦП 10, откуда в цифровом виде следует в ПЭВМ 11. В ПЭВМ 11 рассчитывают по участку спектра полезного сигнала его параметры U0 и T*2. По разности показаний датчика поля определяют ΔB и с учетом зависимости (4) вычисляют значение T2.
В результате каротажа на экране монитора ПЭВМ 11 можно одновременно наблюдать в реальном масштабе времени каротажные диаграммы (графики изменения параметров в зависимости от глубины точки измерения) значений U0, T*2, B1 и В2.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЯДЕРНО-МАГНИТНОГО КАРОТАЖА И УСТРОЙСТВО ЯДЕРНО-МАГНИТНОГО КАРОТАЖА | 2008 |
|
RU2361247C1 |
| Способ ядерно-магнитного каротажа и устройство для его осуществления | 1984 |
|
SU1288564A1 |
| Устройство для ядерно-магнитногоКАРОТАжА | 1978 |
|
SU830269A1 |
| СПОСОБ ПОИСКОВ РУДНЫХ МЕСТОРОЖДЕНИЙ | 1994 |
|
RU2087930C1 |
| Устройство ядерно-магнитного каротажа | 2023 |
|
RU2809927C1 |
| Способ ядерно-магнитного каротажа и устройство для его осуществления | 2023 |
|
RU2832420C1 |
| ЯМР СПЕКТРОСКОПИЯ С ИСПОЛЬЗОВАНИЕМ СРЕДСТВА ЯМР С ГРАДИЕНТНЫМ ПОЛЕМ | 2003 |
|
RU2251097C2 |
| Способ ядерно-магнитного каротажа | 1980 |
|
SU957142A1 |
| СПОСОБ КОНТРОЛЯ ПРОЦЕССОВ ПОДЗЕМНОГО ВЫЩЕЛАЧИВАНИЯ | 1995 |
|
RU2097795C1 |
| СПОСОБ ЯДЕРНО-МАГНИТНОГО КАРОТАЖА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2351959C1 |
Предлагается помехозащищенный способ комплексных измерений ядерно-магнитных и магнитных свойств пород в процессе каротажа. В каждой точке разреза последовательно возбуждают сигнал ядерной индукции от водородсодержащего вещества и измеряют его частоту. Затем производят поляризацию окружающих пород, подвергают принятый сигнал индукции от ядер водорода свободного флюида прямому преобразованию Фурье, измеряют амплитуду и ширину спектральной линии протонного резонанса, по которым судят об индексе свободного флюида и приведенном времени поперечной релаксации. После этого производят повторное возбуждение сигнала ядерной индукции от водородсодержащего вещества и измеряют его частоту, сравнивают частоты сигналов ядерной индукции и по соотношению частот при первом и третьем измерениях судят об индукции магнитного поля в скважине до и после поляризации, а по их разности судят об остаточной намагниченности пород, а также об истинном времени поперечной релаксации свободного флюида. Все указанные измерения производят в одной и той же точке пространства. В результате преобразования Фурье исходный сигнал переводится из временного в частотное представление, что позволяет применить эффективную цифровую фильтрацию сигнала и измерить амплитуду и ширину спектральной линии протонного резонанса. 1 з.п.ф-лы, 4 ил.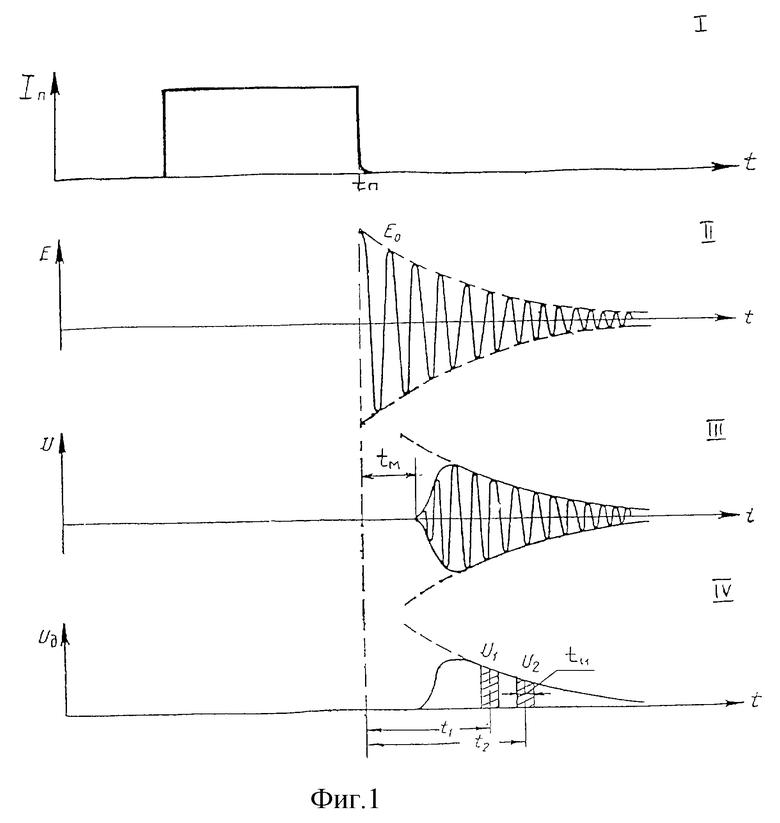
| Устройство для ядерно-магнитного каротажа | 1972 |
|
SU441541A1 |
| Устройство для ядерно-магнитного каротажа | 1975 |
|
SU551551A1 |
| Устройство для ядерного магнитного каротажа | 1976 |
|
SU620882A1 |
| GB 2056082 A, 11.03.1981 | |||
| Устройство установки верхнего валка прокатной клети | 1988 |
|
SU1586812A1 |
| US 5055787 A, 08.10.1991 | |||
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |

