Изобретение относится к области техники и может быть использовано в различных областях науки и техники для перемещения объектов, например в судостроении, авиации, космонавтике и т.д.
Известен преобразователь вращательного движения в поступательное - это ведущие колеса движущихся транспортных средств, например автомобиль, автокара и т.д. В этом случае вращательное движение ведущих колес транспортного средства преобразуется в его поступательное движение за счет силы сцепления ведущих колес с поверхностью, по которой оно движется. Этот преобразователь вращательного движения в поступательное использует силу трения качения, если она отсутствует, транспортное средство будет неподвижно.
Ближе по технической сущности к предлагаемому изобретению является инерционный модуль, содержащий кольцо-основание, вал, вращающийся ротор со смещенным центром вращения и подвижными в радиальном направлении инерционными массами (заявка Великобритании N 2111654, F 03 G 3/00, 1983).
Изобретение направлено на расширение арсенала технических средств, используемых для преобразования вращательного движения вала двигателя в поступательное движение транспортного средства.
Эта задача решается за счет того, что инерционный модуль, содержащий кольцо-основание с внутренней направляющей вращательного движения, ось, подшипники, защитный кожух, кронштейн для крепления модуля к транспортному средству имеет внутреннюю часть, выполненную в виде вращающегося ротора со смещенным центром вращения и с подвижными в радиальном направлении инерционными массами, включающего радиальную втулку с установленными в ней направляющими элементами в виде трубок, внутренние концы которых жестко соединены с радиальной втулкой. Внутри трубок размещены подвижные штанги, внутренние концы которых опираются на противодействующие пружины, а их наружные концы жестко соединены с кронштейнами, в гнезда которых вставлены оси, на которых на подшипниках установлены вращающиеся по направляющей кольца-основания ролики. Для смещения центра вращения модуль также имеет "плавающее" устройство, состоящее из двух симметричных половин, одна из которых содержит паз с вырезом, куда вставляется ползун, который может смещаться в радиальном направлении внутри паза или помощи винтов, установленных в кронштейнах, которые крепятся к корпусу "плавающего" устройства. По краям паза и ползуна нанесена шкала. Внутри ползун имеет гнездо под подшипник и сквозное отверстие для оси радиальной втулки. От смешения в осевом направлении ползун удерживается скобами, прикрепленными к корпусу "плавающего" устройства.
Для уменьшения потерь затрачиваемой энергии при работе модуля вместо противодействующих пружин, размещенных в направляющих элементах, можно использовать силовую электромагнитную систему, содержащую электрические обмотки, размещенные на трубках направляющих элементов, выполненных из электромагнитной стали. Из такого ж материала выполнены штанги радиальных элементов. В этом случае на оси модуля размещены два кольца, соединенные с электрическими обмотками, и щеточный узел для подачи питания в обмотки.
На фиг. 1 приведена конструкция инерционного модуля в разрезе, на фиг. 2 показано "плавающее" устройство, на фиг. 3 - общий вид, на фиг. 4 приведено схематичное изображение инерционного модуля с указанием направлений движения и относительных скоростей инерционных масс, на фиг. 5 даны направления ускоренной Кориолиса движущихся инерционных масс.
На фиг. 1, 2, 3 приняты следующие обозначения:
1 - кольцо-основание инерционного модуля;
2, 15 - кронштейн;
3 - ось ролика;
4 - ролик;
5 - штанга;
6 - направляющая радиального элемента (трубка);
7 - противодействующая пружина;
8 - радиальная втулка;
9 - вал модуля;
10 - корпус "плавающего" устройства;
11 - кожух модуля;
12 - прокладка;
13 - поперечина;
14 - шпилька;
16, 17, 18, 19 - винт;
20 - ползун;
21 - крышка подшипника;
22 - паз;
23, 24 - отверстие;
25 -контргайка;
26 - скоба;
27 - шкала.
Кольцо-основание 1 модуля выполнено кольцевидной формы из легкого и прочного материала, например из титана, и предназначено для обеспечения движения по его внутренней направляющей роликов 4, а также для соединения и крепления деталей инерционного модуля. Кронштейн 2 выполнен в форме латинской буквы U и имеет два отверстия для установки оси 3 с роликом на двух подшипниках и одно отверстие для его соединения со штангой 5, которая расположена внутри направляющей трубки 6. Кронштейн 2, ось 3, подшипники и штанга 5 выполнены из металла, т.е. имеют существенную массу. Штанга 5 и трубка 6 могут быть выполнены из электротехнической стали, но при этом должно соблюдаться требование обеспечения минимального трения при их относительном движении, поскольку штанга 5 движется внутри трубки 6 и своим внутренним концом через прокладку 12 она опирается на противодействующую пружину 7, размещенную внутри трубки 6, которая своим внутренним концом жестко соединена с радиальной втулкой 8, выполненной цилиндрической формы и имеющей по наружной поверхности восемь отверстий (для случая, изображенного на фиг. 1) для установки и жесткого сочленения трубок 6, а также одно центральное отверстие для установки вала 9, который имеет два посадочных места для установки подшипников, установленных в корпусе "плавающего" устройства 10. На валу могут быть установлены два контактных кольца для подачи напряжения на обмотки (на фиг. 1 не показаны). Один конец вала выполнен со шлицами для его соединения с приводным двигателем. Модуль имеет защитный кожух 11 для его изоляции от внешней среды. Поперечина 13 предназначена для увеличения жесткости ротора. Шпилька 14 и кронштейн 15 выполняют роль крепежных элементов.
"Плавающее" устройство (фиг. 2) предназначено для смещения центра вращения ротора модулятора. Она состоит из двух симметричных половин, одна из которых показана на фиг. 2. Корпус "плавающего" устройства 10 должен быть выполнен из легкого и прочного материала, например из титана. Своими более удаленными от центра сторонами корпус жестко соединен с кольцом-основанием. В середине корпус имеет паз 22 с вырезом, куда вставляется ползун 20, который может смещаться в радиальном направлении внутри паза при помощи винтов 16, контрящихся гайками 25 и установленных в кронштейнах 2, которые крепятся к корпусу 10 при помощи винтов 18. По краям паза и ползуна нанесены оцифрованные шкалы 27. Внутри ползун имеет гнездо для установки подшипника (на фиг. 2 не показан), в который вставлен вал модуля. С наружной стороны подшипник закрывается крышкой 21 при помощи винтов 17. От смещения в осевом направлении ползун, а значит, и ротор удерживаются скобами 26, крепящимися винтами 19. Отверстия 24 предназначены для крепления "плавающего" устройства с кольцом-основанием модуля.
Как видно из фиг. 3, инерционный модуль имеет форму перевернутой тарелки. Вал 9 модуля одним концом должен соединяться с приводным двигателем. Корпус 10 "плавающего" устройства жестко соединен с кольцом-основанием. Кожух 11 круглой формы и состоит из двух половин, каждая из которых имеет по два выреза для корпусов "плавающего" устройства. С помощью кронштейнов 15 модуль крепится на транспортном средстве.
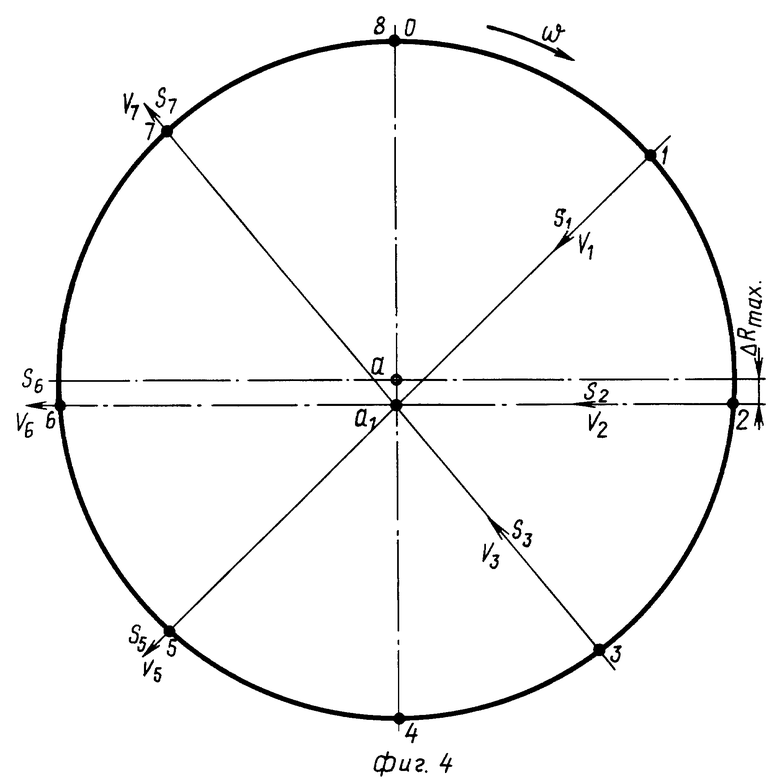
На фиг. 4 приведены следующие обозначения:
a - геометрический центр модуля;
a1 - смещенный (физический) центр вращения;
ΔRmax - величина смещения центра вращения;
ω - угловая скорость ротора;
0, 1, 2,3, ..., 8 - точки положения элементов ротора в момент времени;
S1, ..., S7 - относительные движения инерционных масс;
V1, ..., V7 - скорости движения инерционных масс.
Углы между радиальными элементами равны 45o.
При рассмотрении фиг. 4 делается допущение - ротор вращается по часовой стрелке с постоянной угловой скоростью ω . При этом наблюдается следующее: в точке 0 - примем ее за начало отсчета - величина радиуса вращения максимальна и равна R+ΔRmax и при движении по часовой стрелке она начинает уменьшаться, проходит точку 1, доходит до точки 2, в которой величина радиуса вращения приблизительно равна R (с определенной долей погрешности). В точке 3 она также уменьшается до точки 4. Здесь уменьшение радиуса заканчивается и его величина становится минимальной, равной R-ΔRmax, и отсюда уже начинается увеличение радиуса до точки 8. Следует заметить, что в точке 6 величина радиуса вращения становится приблизительно равна R (с допустимой погрешностью. ) В точке 8 величина радиуса максимальна и равна R+ΔRmax, а затем цикл повторяется заново. Рассматривая цикл движения, видим, что направления относительных движений и скоростей инерционных масс для правой и левой половин относительно оси 0 - 4 совпадают, т.е. стрелки направлены справа налево. Это существенно, т.к. направления относительных скоростей определяют направления кориолисовых ускорений инерционных масс.
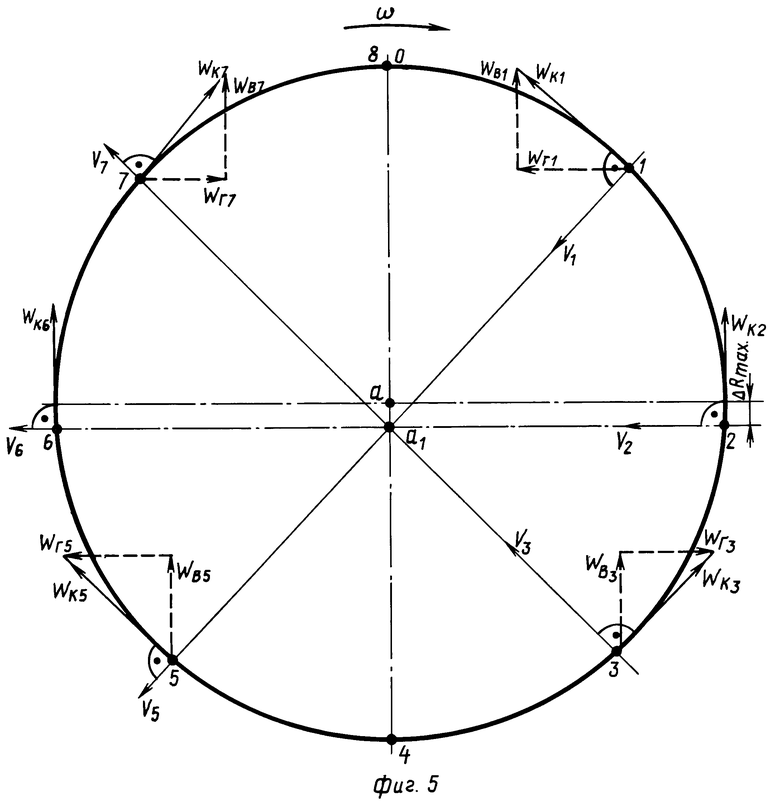
На фиг. 5 принятые следующие обозначения:
a - геометрический центр вращения;
a1 - физический центр вращения;
ΔRmax - величина смещения центра вращения;
0, 1, 2, 3, ..., 8 - точки, соответствующие положению элементов модуля в момент времени t;
ω - угловая скорость модуля;
WК1, ..., WК7 - вектора ускорений Кориолиса движущихся инерционных масс;
WГ1, . . ., WГ7 - горизонтальные составляющие векторов ускорений Кориолиса;
WВ1, ..., WВ7 - вертикальные составляющие векторов ускорений Кориолиса;
V1, ..., V7 - вектора относительных скоростей инерционных масс.
При рассмотрении направлений ускорений Кориолиса следует учесть, что в точках 0 (или 8) и 4 ускорение Кориолиса равно нулю, т.к. в этих точках равны нулю вектора относительных скоростей. В точках 1, 2, 3, 5, 6, 7 направления векторов ускорений Кориолиса определяются поворотом векторов относительных скоростей в этих точках на 90o в сторону угловой скорости. В точках 1 и 7 модули  а в точках 3 и 5 модули
а в точках 3 и 5 модули  т.к. инерционные массы для этих пар находятся на равном расстоянии от центра вращения, а угловая скорость ω по допущению постоянная. В точках 2 и 6 вектора WК2 и WК6 совпадает и по модулю и по направлению. Далее, если вектора WК1, WК3, WК5, WК7 разложить на вертикальные и горизонтальные составляющие, то видно, что вектора WГ1 и WГ7, а также вектора WГ3 и WГ5 равны по модулю и направлены в противоположные стороны, т.е. они взаимно компенсируются, а их вертикальные составляющие суммируются и дают вертикальную результирующую составляющую Кориолисова ускорения, направленную в одну сторону, т.е. в сторону, противоположную смещению центра вращения модуля. Модуль ускорения Кориолиса определяется по известной формуле:
т.к. инерционные массы для этих пар находятся на равном расстоянии от центра вращения, а угловая скорость ω по допущению постоянная. В точках 2 и 6 вектора WК2 и WК6 совпадает и по модулю и по направлению. Далее, если вектора WК1, WК3, WК5, WК7 разложить на вертикальные и горизонтальные составляющие, то видно, что вектора WГ1 и WГ7, а также вектора WГ3 и WГ5 равны по модулю и направлены в противоположные стороны, т.е. они взаимно компенсируются, а их вертикальные составляющие суммируются и дают вертикальную результирующую составляющую Кориолисова ускорения, направленную в одну сторону, т.е. в сторону, противоположную смещению центра вращения модуля. Модуль ускорения Кориолиса определяется по известной формуле:
Wкор= 2ω•V•sinα (1)
где ω - угловая скорость вращения ротора модуля;
V - относительная скорость движения инерционных масс;
α - угол между векторами ω и V, в нашем случае он равен 90o, и значит, sinα = 1.
Инерционный модуль работает следующим образом. При вращении ротора модуля на инерционные массы, движущиеся и вращательно и поступательно, а именно: на кронштейн 2 (фиг. 1), на ось ролика 3, на ролик 4, на подшипники оси ролика, на штангу 5 будет действовать результирующая сила Кориолиса, направленная в сторону, противоположную направлению ускорения Кориолиса, т.е. совпадающую с направлением смещения центра вращения и равная:
Fкор = -m • Vкор (2)
или с учетом (1)
Fкор= -2m•ω•V, (3),
т. е. величина силы Кориолиса пропорциональна движущимся инерционным массам m, угловой скорости их вращения ω и скорости их относительного перемещения V. Эта сила будет являться движущей для инерционного модуля при его поступательном перемещении. Величина ее пропорциональна прикладываемому моменту к валу модуля, а направление ее совпадает с направлением смещения центра вращения.
Изобретение относится к инерционным движителям транспортных средств. Модуль содержит кольцо-основание, вал, вращающийся ротор со смещенным центром вращения и подвижными в радиальном направлении инерционными массами. Имеется устройство, предназначенное для смещения центра вращения упомянутого ротора, состоящего из двух симметричных половин корпуса, ползуна, скоб, кронштейнов и винтов. Одна из упомянутых половин корпуса имеет паз, в который вставлен ползун с возможностью перемещения в радиальном направлении с помощью винтов, закрепленных в кронштейнах, которые установлены на упомянутом корпусе, и удерживаемый от смещения в осевом направлении скобами. Кольцо-основание снабжено направляющей, а упомянутый вращающийся ротор имеет радиальную втулку с установленными в ней направляющими элементами в виде трубок, внутри которых размещены штанги, внутренние концы которых опираются на противодействующие пружины, а их наружные концы жестко соединены с кронштейнами, в гнездах которых на подшипниках вставлены оси, на которых закреплены ролики, предназначенные для движения по упомянутой направляющей кольца-основания. Изобретение направлено на расширение арсенала технических средств. 5 ил.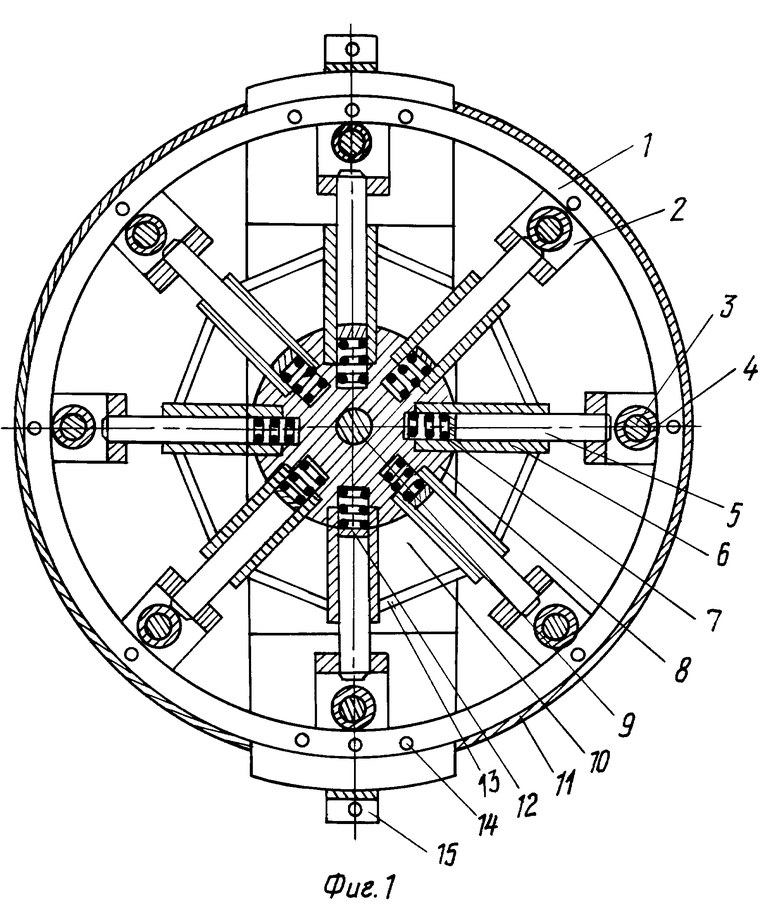
Инерционный модуль, содержащий кольцо-основание, вал, вращающийся ротор со смещенным центром вращения и подвижными в радиальном направлении инерционными массами, отличающийся тем, что он снабжен устройством, предназначенным для смещения центра вращения упомянутого ротора, состоящего из двух симметричных половин корпуса, ползуна, скоб, кронштейнов и винтов, одна из упомянутых половин корпуса имеет паз, в который вставлен ползун с возможностью перемещения в радиальном направлении с помощью винтов, закрепленных в кронштейнах, которые установлены на упомянутом корпусе, и удерживаемый от смещения в осевом направлении скобами, упомянутое кольцо-основание снабжено направляющей, а упомянутый вращающийся ротор имеет радиальную втулку с установленными в ней направляющими элементами в виде трубок, внутри которых размещены штанги, внутренние концы которых опираются на противодействующие пружины, а их наружные концы жестко соединены с кронштейнами, в гнездах которых на подшипниках вставлены оси, на которых закреплены ролики, предназначенные для движения по упомянутой направляющей кольца-основания.
| ПУЛЬСАТОР | 1996 |
|
RU2111654C1 |
| СПОСОБ СОЗДАНИЯ ИНЕРЦИОННЫХ ОДИНАКОВЫХ ПО ВЕЛИЧИНЕ ИМПУЛЬСОВ В ЗАДАННОМ КООРДИНАТНОМ НАПРАВЛЕНИИ И УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 1994 |
|
RU2083419C1 |
| DE 3433411 A1, 20.03.1986 | |||
| DE 19517181 A1, 15.02.1996 | |||
| УСТРОЙСТВО И СПОСОБ РАСПРЕДЕЛЕНИЯ ТЕКУЧИХ ИЛИ СПОСОБНЫХ К ОТЛИВКЕ МАСС, В ЧАСТНОСТИ ВОЗДУШНОГО ШОКОЛАДА | 2012 |
|
RU2608679C2 |
| JP 59000577 A, 05.01.1984 | |||
| US 3807244 A, 17.03.1974 | |||
| ТОЛЧИН В.И | |||
| Инерцоид | |||
| - Пермь: Книжное изд-во, 1977, с.89,90. | |||
