Изобретение относится к измерительной технике, в частности к области приборостроения, и может найти применение в инерциальных системах подвижных объектов - преимущественно в малоразмерной авиационной и космической технике и других транспортных средствах.
Известно инерциальное измерительное устройство, выполненное в виде гироскопа-акселерометра, в котором инерционная масса закреплена в двухосном рамочном (кардановом) подвесе со смещенным относительно плоскости рамок центром масс (см. заявку GB №2151022, МКИ G 01 С 19/56, 1987 г.). При этом внешняя рамка совершает принудительное колебание, а вторая рамка с ортогональным упругим торсионным подвесом также совершает колебания при наличии измеряемого вращения основания в результате возникающего при этом кориолисова ускорения. Таким образом, данное устройство проявляет себя как гироскоп.
При наличии линейного (и углового) ускорения смещенная относительно плоскости рамок инерционная масса отклонится на некоторый угол относительно оси, лежащей в плоскости рамок.
Недостаток данной конструктивной схемы заключается в ее критичности даже к очень малым отклонениям от ортогональности осей подвеса рамок, поскольку при наличии неортогональности задаваемые (принудительные) колебания одной из рамок напрямую частично (пропорционально углу неортогональности) передаются на другую рамку и могут восприниматься как сигнал измеряемого вращения основания, что недопустимо.
Известно также инерциальное измерительное устройство, содержащее корпус и подвижное основание, на котором установлен чувствительный элемент (ЧЭ) маятникового акселерометра с блоком преобразования сигналов. При этом плечо ЧЭ маятникового акселерометра расположено в плоскости движения ортогонально направлению этого движения (пат. РФ №2.162.229, кл. G 01 С, 19/56). Движение, как и в первом аналоге, совершается в виде вибраций основания. Линейное ускорение измеряется маятниковым акселерометром традиционно, а угловая скорость - в виде кориолисова ускорения при воздействиях на основание и подвес ЧЭ маятникового акселерометра измеряемой угловой скорости. Данное техническое решение принято за прототип.
Основная особенность данного технического решения заключается в его малогабаритном исполнении. Для получения информации о шести (трех линейных и трех угловых) параметрах движения подвижного объекта требуется три таких прибора. Их оси чувствительности образуют триаду ортогональных направлений. Каждый из приборов выдает информацию об угловой скорости (на частоте вибраций основания) и линейном ускорении (в виде сигнала постоянного тока). В этом приборе трудно обеспечить высокую чувствительность при малогабаритном исполнении. Недостаточными представляются также и функциональные возможности (шесть параметров движения измеряются тремя приборами). Данное изобретение направлено на решение задачи повышения чувствительности и функциональных возможностей прибора при малогабаритном исполнении. Решение поставленной задачи достигается путем применения соответствующей схемы размещения ЧЭ на подвижном основании и конструктивного исполнения ЧЭ.
Сущность предлагаемого изобретения заключается в том, что подвижное основание выполнено в виде полого ротора с возможностью задания ему вращения, и снабжено дополнительно, как минимум, тремя аналогичными акселерометрами, закрепленными в полости ротора так, что они образуют пары, симметрично расположенные относительно оси вращения ротора, причем оси колебаний чувствительных элементов маятниковых акселерометров размещены на периферии, а их плечи расположены радиально с возможностью совершения колебаний в плоскости, выбранной, как минимум, из двух взаимно перпендикулярных плоскостей, одна из которых для ротора является экваториальной, а остальные меридиональными.
Кроме того, чувствительные элементы маятниковых акселерометров выполнены в виде двух монолитных узлов, один из которых включает в себя чувствительные элементы, выполненные с возможностью их колебаний в экваториальной плоскости ротора, а второй - в меридиональной.
Кроме того, инерционные массы чувствительных элементов маятниковых акселерометров имеют плоскую форму и выполняют функцию подвижного электрода конденсатора, а неподвижный электрод в виде пластины прикреплен к корпусу с возможностью формирования сигнала ЧЭ маятникового акселерометра.
Размещение ЧЭ маятниковых акселерометров с направлением их плеч от периферии к оси вращения ротора приводит к неустойчивому характеру работы маятника при отсутствующей отрицательной обратной связи. Фактор неустойчивости в данном случае проявляется как положительная обратная связь, приводящая к повышению чувствительности при измерении параметров движения. При указанном конструктивном исполнении возникает возможность однотипными приборами измерять пять параметров движения: линейное (а при необходимости и угловое) ускорение по трем ортогональным осям и угловую скорость (как составную часть кориолисова ускорения) по двум ортогональным осям. Третий угловой параметр углового движения определяется как изменение угловой скорости корпуса прибора относительно стабилизированной в инерциальном пространстве угловой скоростью ротора.
Для пояснения сущности изобретения в описании приводятся чертежи.
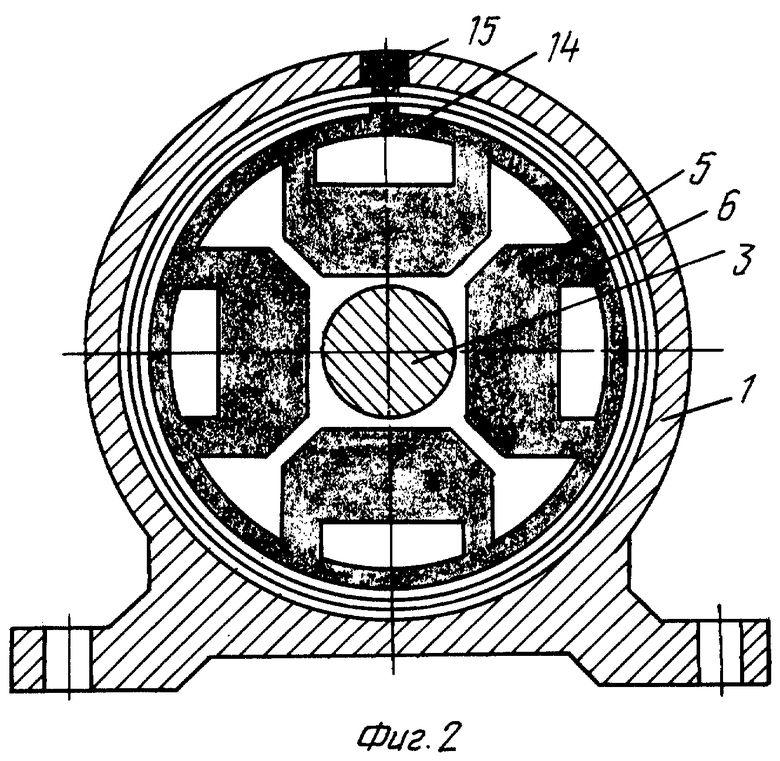
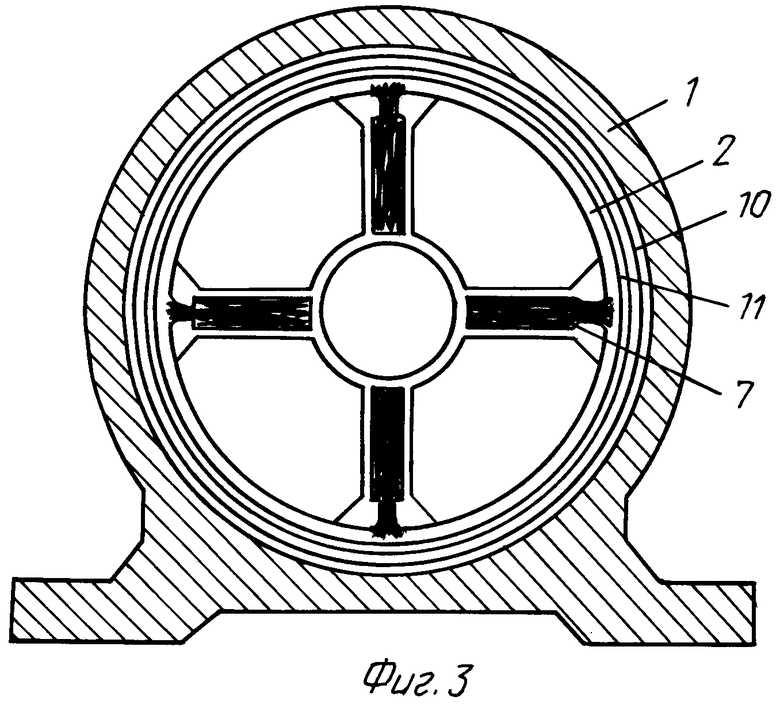
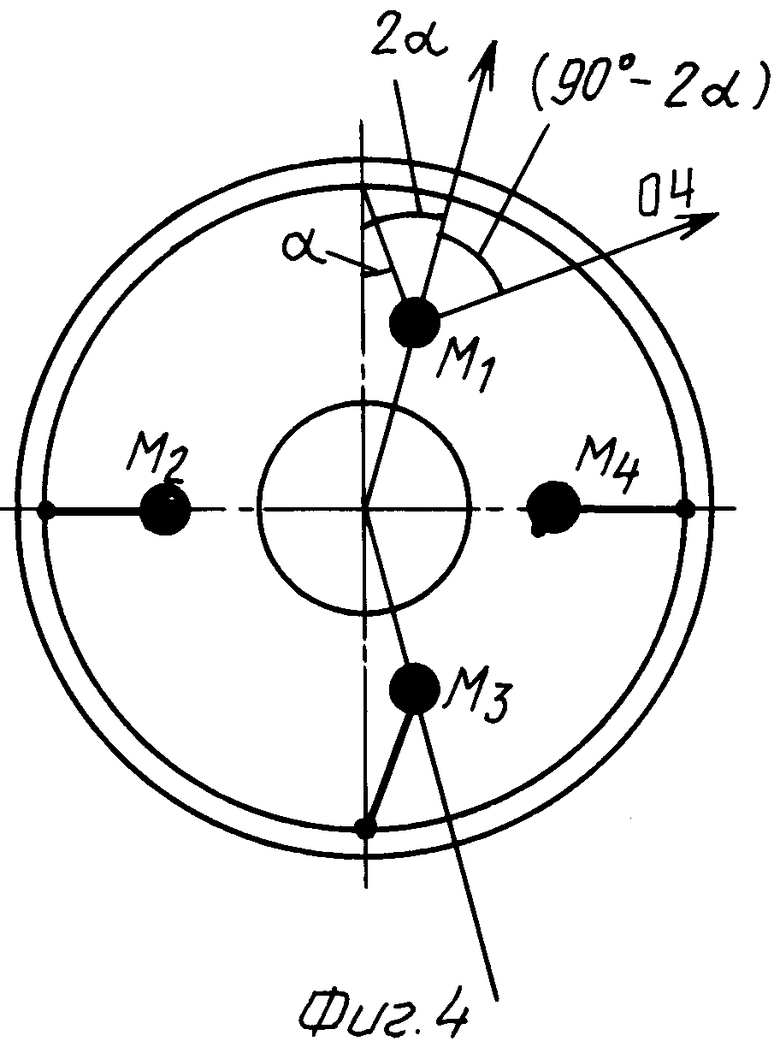
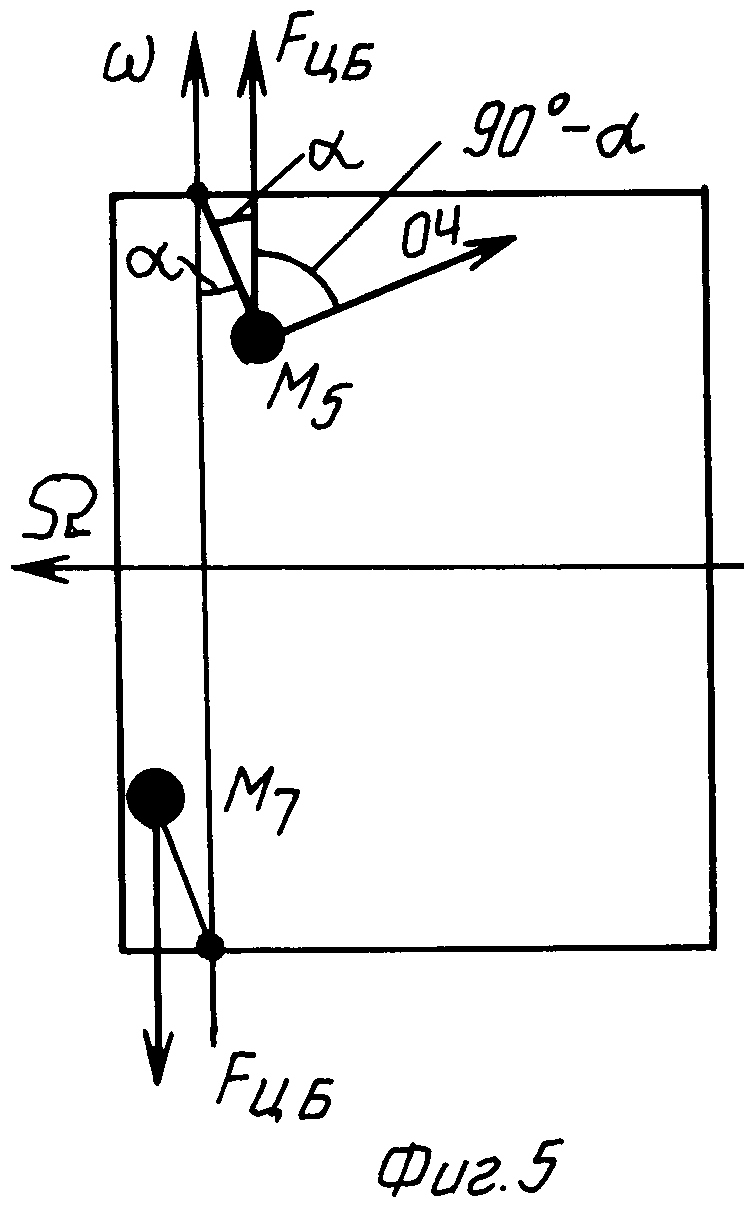
На фиг.1 приведен общий вид устройства с емкостными элементами связи его невращающейся части с вращающимся ротором. На фиг.2 показана конструктивная схема устройства с видом на ЧЭ маятниковых акселерометров с колебательными движениями ЧЭ в меридиональных плоскостях. На фиг.3 показана конструктивная схема устройства с видом на маятниковые ЧЭ с колебательными движениями в экваториальной плоскости. На фиг.4 поясняется принцип действия маятниковых акселерометров при измерении линейных ускорений. На фиг.5 поясняется принцип действия маятниковых акселерометров при измерении составляющих вектора угловой скорости, направленных радиально, а также составляющих вектора углового ускорения, направленных по второму (ортогональному по отношению к первому) радиусу (работают меридиональные ЧЭ). На фиг.6 поясняется принцип действия “экваториальных” маятниковых акселерометров при измерении составляющих вектора углового ускорения, направленных по оси вращения ротора. На фиг.7 поясняется принцип действия “экваториальных” маятниковых акселерометров при измерении гравитационного градиента.
Предлагаемое инерциальное измерительное устройство содержит корпус 1 и подвижное основание 2, которое выполнено в виде полого ротора. Ротор 2 с помощью цапф 3 и подшипников 4 подвешен в корпусе 1. В средней части полости ротора размещена система с ЧЭ маятниковых акселерометров, содержащая блок преобразования сигналов (на чертежах не показан) и ЧЭ 5 маятниковых акселерометров, которые размещены радиально и имеют направление плеч от места крепления на периферии 6 к центру - к оси вращения ротора. ЧЭ маятниковых акселерометров размещены попарно симметрично относительно оси вращения и имеют возможность совершения колебательных движений в плоскости, выбранной, как минимум, из двух взаимно перпендикулярных плоскостей, одна из которых является экваториальной (ЧЭ 7 на фиг.1), а остальные - меридиональными ЧЭ 5 (фиг.2). Узлы, в которых колеблются однотипные меридиональные ЧЭ 5 и экваториальные ЧЭ 7 по радиальным направлениям, изготовлены из единой заготовки, то есть в монолитном исполнении. ЧЭ маятниковых акселерометров имеют плоскую форму и выполняют функцию подвижного электрода конденсатора. Неподвижные электроды выполнены в виде электропроводной поверхности на пластинах, закрепленных к корпусу с изменяющимся зазором из-за подвижности подвижного электрода.
Для передачи питания в полость ротора на корпусе 1 и роторе 2 закреплены токопроводящие кольца 8 и 9 с минимальным между ними радиальным зазором. Кольца выполняют роль обкладок конденсатора, включенных в разрыв одного из проводов, передающих в полость ротора напряжение питания. В разрыв второго такого же провода включены аналогичные кольца 10 и 11. Кольца 12 и 13 включены в разрыв проводов, передающих информацию от ЧЭ по мультиплексному принципу на неподвижную часть прибора. Вторым проводом является общий провод с кольцами 10 и 11.
Акселерометры имеют ограниченную отрицательную обратную связь, которая, помимо прочего, необходима также и для обеспечения устойчивой работы ЧЭ. Для электрической “привязки” выходных сигналов акселерометров к системе координат, связанной с неподвижной частью прибора, на роторе размещен элемент постоянного магнита 14, а на неподвижной части - приемная катушка 15 индуктивности.
Принцип действия предлагаемого инерциального измерительного устройства заключается в следующем. Каждый ЧЭ маятникового акселерометра функционирует в условиях вращения основания (ротора), в полости которого закреплены ЧЭ. ЧЭ начинает отклоняться от начального положения при воздействии на него линейного, углового или кориолисова ускорения (фиг.5 и 6), а также градиента гравитации (фиг.7).
Помимо перечисленных воздействующих факторов, на отклоняемый от нейтрального положения (направленного радиально) маятник оказывает воздействие центробежная (Fцб) сила (фиг 5... 7). Величина этой силы определяется по формуле:

где m, Q, r - инерционная масса, угловая скорость вращения ротора и расстояние от оси вращения до инерционной массы ЧЭ маятникового акселерометра соответственно. Проекция Fцб на направление оси чувствительности (фиг.4) определяется по формуле:

или, поскольку угол α малый,

Эта формула справедлива для “экваториальных” акселерометров (фиг.4). Для “меридиональных” акселерометров справедлива формула:

где β - угол отклонения маятника относительно радиального направления в меридиональной плоскости ротора.
Экваториальные ЧЭ могут измерять кажущееся ускорение W*, угловое ускорение ∈ и градиент гравитации Г. “Меридиональные” ЧЭ наряду с возможностью измерения кажущегося ускорения W* и углового ускорения ∈ могут измерять также и кориолисово ускорение Wc для формирования измерения угловой скорости ω :
Wc=2Ω rω sin(Ω t+ψ ).
Идентификация воздействующих (в том числе измеряемых) факторов может быть осуществлена с помощью следующих алгоритмов для выходных напряжений ЧЭ




Здесь Uw1 и Uw2 - напряжения, несущие информацию о кажущихся ускорениях в двух ортогональных направлениях в экваториальной плоскости. Напряжения периодические - на частоте вращения ротора. По третьей оси (Uw3) напряжения снимаются с каждого из меридиональных акселерометров в виде постоянного тока. Uс1, Uс2 - то же для кориолисовых ускорений (или измеряемых угловых скоростей) в двух ортогональных (меридиональных) направлениях. Снимаемые выходные напряжения - также периодические.
Третий угловой параметр, как уже было отмечено, проявляется при угловой эволюции (изменении фазы) корпуса прибора относительно стабильно вращающегося в абсолютном пространстве ротора.
U∈ - сигнал об угловом ускорении (в виде постоянного тока), снимаемого с двух или четырех акселерометров, расположенных соответственно в одной или двух меридиональных плоскостях. Для обеспечения возможности измерения углового параметра в экваториальной плоскости сигнал (U∈ 1→0) отрабатывается на обнуление. При использовании двух "меридиональных" акселерометров используется полусумма их выходных сигналов, при использовании четырех "меридиональных" акселерометров используется четвертая часть суммы четырех сигналов.
Градиент гравитации (сигнал Uг) проявляет себя как результат разницы моментов сил притяжения к Земле в паре противолежащих акселерометров и зависит от расстояния до Земли. Момент, действующий на ближайшую к Земле массу, больше, чем на удаленную. При равноудаленных массах и в случаях расположения их по вертикали (при нулевых плечах момента) указанные моменты равны, а следовательно, их разница и совокупные сигналы - нулевые. За один оборот возникают четыре нулевых значения, следовательно, выходной сигнал о градиенте гравитации проявляется на удвоенной частоте вращения ротора.
При вращении ротора за каждый оборот постоянный магнит 11 наводит электрический импульс в приемной катушке индуктивности 12. Фазовое пространство между этими импульсами заполняется тактовыми импульсами высокой частоты. При стабильном положении корпуса прибора в абсолютном пространстве количество тактовых импульсов между магнитокатушечными импульсами постоянно, поскольку Ω =const. При возникновении угловых эволюции корпуса в зависимости от ее направления количество тактовых импульсов на базе одного оборота ротора может увеличиваться или уменьшаться. Величина и знак этого изменения будут характеризовать величину и направление углового отклонения корпуса прибора в экваториальной плоскости ротора.
Уравнение движения ЧЭ маятникового акселерометра с учетом центробежных сил имеет вид

где I, В, Кмех, М - соответственно момент инерции, коэффициент демпфирования, коэффициент механической жесткости и суммарный момент от действующих (в том числе) измеряемых факторов.
Кдин=2mΩ 2r - динамическая (отрицательная) жесткость, проявляющаяся как положительная обратная связь. Отрицательный знак этого члена в уравнении позволяет реализовать любую результирующую жесткость подвеса ЧЭ, включая нулевую, создающую эквивалент свободного подвеса инерционной массы при обеспечении необходимой прочности подвеса.
Частота свободных колебаний ω 0 будет в данном случае определяться выражением

Чувствительность (статическая - без учета динамики) h определяется как

Для прибора традиционного типа (прототипа) hT равно

Возьмем отношение

Как видим, в предельном случае при  , что теоретически означает отсутствие предела для увеличения чувствительности.
, что теоретически означает отсутствие предела для увеличения чувствительности.
Введенная положительная обратная связь на практике означает форсированное проявление неустойчивости, как в системе. Для обеспечения устойчивости в приборе должна быть предусмотрена (как и в традиционных прецизионных акселерометрах) электростатическая или магнитоэлектрическая отрицательная обратная связь.
Съем сигналов, несущих информацию об измеряемых параметрах, осуществляется по величине осредненного сигнала за моменты времени, соответствующие четверти, двум, трем четвертям и полному обороту ротора, определяемым по количеству тактовых импульсов относительно магнитно-катушечных импульсов. В данном случае речь идет о получении информации в декартовой системе координат.
Возможно также построение полярной системы координат путем определения амплитуды и фазы сигналов. В частности, при этом можно определять азимут нужного направления в наземных условиях, а также углы ориентации космических аппаратов на орбите и гравитационную местную вертикаль.
Таким образом, можно считать, что поставленная цель повышения чувствительности и расширения функциональных возможностей при малогабаритном исполнении прибора вполне реализуема. Эта реализуемость подтверждается всей совокупностью признаков предложенных решений в соответствии с описанием устройства прибора, его принципа действия и чертежами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Инерциальный измерительный модуль | 2021 |
|
RU2761592C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА, ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ПОПЛАВКОВОГО МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА И УСТРОЙСТВА ЕГО РЕАЛИЗУЮЩИЕ | 2005 |
|
RU2281874C1 |
| Акселерометр | 1980 |
|
SU901915A1 |
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП-АКСЕЛЕРОМЕТР | 2000 |
|
RU2162229C1 |
| Устройство для измерения углов отклонения подвижного объекта | 1991 |
|
SU1810756A1 |
| Компенсационный маятниковый акселерометр | 1985 |
|
SU1286902A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ УПРАВЛЯЕМЫХ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2241959C1 |
| Универсальный прецизионный мехатронный стенд с инерциальными чувствительными элементами для контроля гироскопических измерителей угловой скорости | 2022 |
|
RU2804762C1 |
| ГИРОСКОП-АКСЕЛЕРОМЕТР С ЭЛЕКТРОСТАТИЧЕСКИМ ПОДВЕСОМ РОТОРА И ПОЛНОЙ ПЕРВИЧНОЙ ИНФОРМАЦИЕЙ | 2014 |
|
RU2568147C1 |
| ГИРОГОРИЗОНТКОМПАС | 2014 |
|
RU2550592C1 |


Изобретение относится к измерительной технике, в частности к области приборостроения, и может найти применение в инерциальных системах подвижных объектов - преимущественно в малоразмерной авиационной и космической технике и др. транспортных средствах. Устройство содержит корпус и подвижное основание, выполненное в виде ротора с полостью, в которой закреплено четное число чувствительных элементов маятниковых акселерометров с блоком преобразования сигналов. При этом чувствительные элементы маятниковых акселерометров установлены с возможностью совершения их колебаний в плоскости, выбранной, как минимум, из двух взаимно перпендикулярных плоскостей, одна из которых для ротора является экваториальной, а остальные меридиональными. Плечи чувствительных элементов маятниковых акселерометров расположены в плоскости движения (вращения) ротора, попарно симметрично относительно оси вращения ротора, закреплены на периферии полости ротора и направлены радиально в сторону оси вращения. Инерционные массы чувствительных элементов маятниковых акселерометров имеют плоскую форму и выполняют функцию подвижного электрода конденсатора, а неподвижный электрод в виде пластины прикреплен к корпусу. При этом формируется сигнал чувствительного элемента для передачи его в блок преобразования сигнала. Кроме того, чувствительные элементы маятниковых акселерометров могут быть выполнены в виде двух монолитных узлов, один из которых включает в себя чувствительные элементы, выполненные с возможностью их колебаний в экваториальной плоскости ротора, а второй - в меридиональной. Техническим результатом является повышение чувствительности и расширение функциональных возможностей устройства при малогабаритном исполнении. 1 з.п. ф-лы, 7 ил.

| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП-АКСЕЛЕРОМЕТР | 2000 |
|
RU2162229C1 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ НЕПРЕРЫВНОЛИТЫХ ПРОФИЛЬНЫХ ЗАГОТОВОК | 1999 |
|
RU2151022C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1994 |
|
RU2126161C1 |
| US 4779463 А, 25.10.1988 | |||
| US 5456110 А, 10.10.1995. | |||

