Изобретение относится к измерительной технике и может быть использовано для высокоточных определений угловой координаты объекта в специальных геодезических работах, в геофизических точных измерениях и при производстве крупногабаритных изделий в качестве контрольно-измерительной аппаратуры.
Известно устройство для измерения перемещений, подвижная часть которого, содержащая жестко связанные осветитель, объектив, линейный фоточувствительный прибор с зарядовой связью, перемещается вдоль зубчатой рейки, причем прорези рейки проецируются на фоточувствительную область линейного фоточувствительного прибора с зарядовой связью (Скрибанов Е. В., Гришин М. П., Братенков А.А. Устройство для измерения линейных перемещений //Измерительная техника.- 1983.- N11.- С. 13-15).
Недостатком этого устройства является невысокая точность измерения.
Наиболее близким к предлагаемому устройству является устройство (а.с. N 1290063, кл. G 01 В 11/26, 1987 г.), состоящее из входных зеркал 1, 2 и 3, полупрозрачного зеркала-смесителя 4 и глухого зеркала 5. Отношение расстояний между зеркалами 1 и 2, 1 и 3 составляет иррациональное число. Поэтому в плоскости анализа образуются две интерференционные картины с шагом полос, некратным друг другу.
Недостаток этого устройства заключается в необходимости дополнительного пересчета для получения информации об ориентации объекта.
Технической задачей изобретения является повышение удобства считывания результатов измерения.
Техническая задача решается тем, что устройство, содержащее лазер, предназначенный для скрепления с объектом, зеркальный блок, выполненный в виде разнесенных в плоскости контроля трех входных зеркал, а также направляющих в блок регистрации интерференционную картину глухого и полупрозрачного зеркала, снабжено оптически связанным с зеркальным блоком фоточувствительным прибором, выполненным в виде линейного фоточувствительного прибора с зарядовой связью, синхрогенератором, усилителем, компаратором, генератором, первым и вторым счетчиками, первым, вторым, третьим и четвертым триггерами, первым и вторым регистрами, первым и вторым элементами ИЛИ-НЕ, первым и вторым элементами И, ПЗУ, блоком индикации, причем входы линейного фоточувствительного прибора с зарядовой связью соединены с управляющими выходами синхрогенератора, а выход линейного фоточувствительного прибора с зарядовой связью - со входом усилителя, выход которого подключен ко входу компаратора, чей второй вход выполнен с возможностью подачи на него опорного напряжения; выход генератора соединен со счетными входами первого и второго счетчика; выход STR синхрогенератора соединен со входами сброса первого и второго счетчиков, входами разрешения записи первого и второго регистров и входами установки в "единицу" второго и четвертого триггеров; информационные выходы первого и второго счетчиков соединены с информационными входами первого и второго регистров соответственно, выходы которых соединены с адресными входами ПЗУ, информационные выходы которого соединены со входами блока индикации; выход компаратора соединен со счетными входами первого и третьего триггеров, а также со вторыми входами первого и второго элементов ИЛИ-НЕ; первый вход первого элемента И соединен с выходом  синхрогенератора, выход первого элемента И соединен с информационным входом первого триггера; первый вход второго элемента И соединен с выходом STR/2 синхрогенератора, выход второго элемента И соединен с информационным входом третьего триггера, вторые входы первого и второго элементов И соединены с выходом
синхрогенератора, выход первого элемента И соединен с информационным входом первого триггера; первый вход второго элемента И соединен с выходом STR/2 синхрогенератора, выход второго элемента И соединен с информационным входом третьего триггера, вторые входы первого и второго элементов И соединены с выходом  синхрогенератора; прямой выход первого триггера соединен со входом разрешения счета первого счетчика, инверсный выход первого триггера соединен с первым входом первого элемента ИЛИ-НЕ, выход которого соединен со входом сброса второго триггера, чей инверсный выход соединен со входом сброса первого триггера; прямой выход третьего триггера соединен со входом разрешения счета второго счетчика, инверсный выход третьего триггера соединен с первым входом второго элемента ИЛИ-НЕ, чей выход соединен со входом сброса четвертого триггера, инверсный выход четвертого триггера соединен со входом сброса третьего триггера.
синхрогенератора; прямой выход первого триггера соединен со входом разрешения счета первого счетчика, инверсный выход первого триггера соединен с первым входом первого элемента ИЛИ-НЕ, выход которого соединен со входом сброса второго триггера, чей инверсный выход соединен со входом сброса первого триггера; прямой выход третьего триггера соединен со входом разрешения счета второго счетчика, инверсный выход третьего триггера соединен с первым входом второго элемента ИЛИ-НЕ, чей выход соединен со входом сброса четвертого триггера, инверсный выход четвертого триггера соединен со входом сброса третьего триггера.
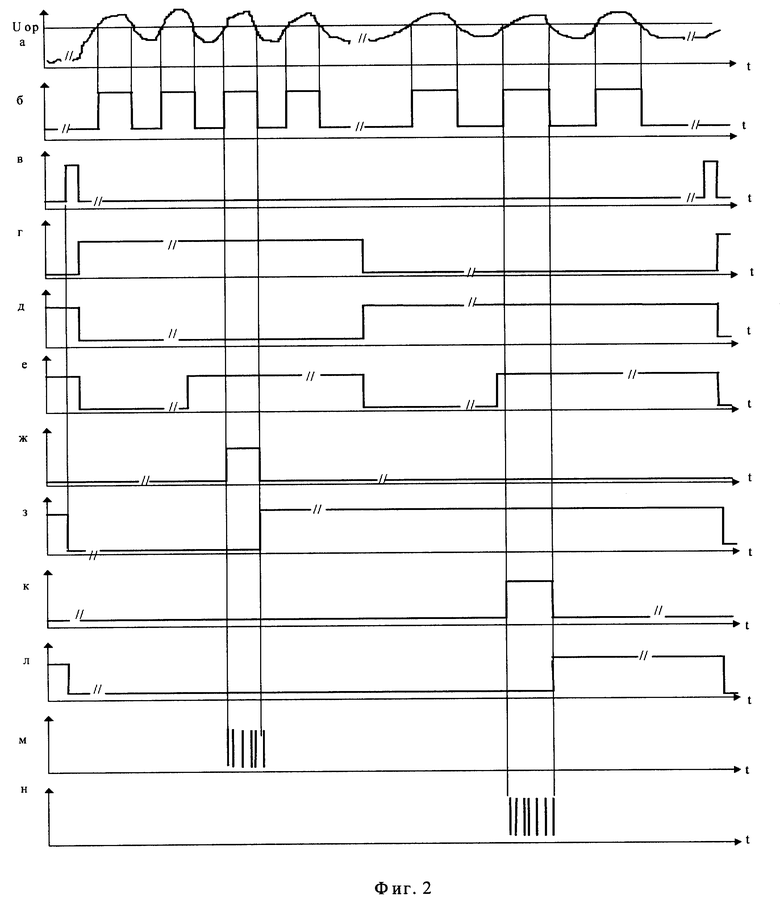
Сущность изобретения поясняется чертежами, где на фиг. 1 изображена схема устройства для автоматического определения изменений угловой координаты объекта; на фиг. 2 изображены диаграммы, поясняющие работу устройства для автоматического определения изменений угловой координаты объекта.
Устройство для автоматического определения изменений угловой координаты объекта содержит лазер (на фиг.1 не показан), предназначенный для скрепления с объектом, зеркальный блок, выполненный в виде разнесенных в плоскости контроля трех входных зеркал 1, 2 и 3, а также направляющих в блок регистрации интерференционную картину глухого зеркала 5 и полупрозрачного зеркала 4, зеркала 1, 4 и 5 имеют в направлении, перпендикулярном плоскости измерения, габаритный размер вдвое больший, чем зеркала 2 и 3, которые смещены друг относительно друга в указанном направлении на величину, равную их габаритному размеру. Расстояния между центрами зеркал 1 и 2, 1 и 3 относятся как иррациональное число. Нормали к зеркалам 1, 2 и 3 лежат в плоскости контроля, обращены к контролируемому объекту и образуют с направлением на него углы 45o. Зеркало 4 установлено между зеркалами 1 и 2 под углом к прямой, проходящей через центр зеркала 2 параллельно плоскости измерения и пересекающей перпендикулярную плоскости измерения ось симметрии зеркала 1. Зеркало 5 расположено по ходу одного из пучков, идущих от приемных зеркал и отражаемых зеркалом 4, перпендикулярно этому пучку, по ходу второго пучка, отражаемого зеркалом 4, установлены оптически связанный с зеркальным блоком линейный фоточувствительный прибор с зарядовой связью 6, синхрогенератор 7, усилитель 8, компаратор 9, генератор 10, первый счетчик 11, второй счетчик 12, первый регистр 13, второй регистр 14, ПЗУ 15, блок индикации 16, первый триггер 17, второй триггер 18, третий триггер 19, четвертый триггер 20, первый элемент И 21, второй элемент И 22, первый элемент ИЛИ-НЕ 23, второй элемент ИЛИ-НЕ 24.
Входы линейного фоточувствительного прибора с зарядовой связью 6 соединены с управляющими выходами синхрогенератора 7, а выход линейного фоточувствительного прибора с зарядовой связью 6 - со входом усилителя 8, выход которого подключен ко входу компаратора 9, чей второй вход выполнен с возможностью подачи на него опорного напряжения; выход генератора 10 соединен со счетными входами первого счетчика 11 и второго счетчика 12; выход STR синхрогенератора 7 соединен со входами сброса первого счетчика 11 и второго счетчика 12, входами разрешения записи первого регистра 13 и второго регистра 14 и входами установки в "единицу" второго триггера 18 и четвертого триггера 20; информационные выходы первого счетчика 11 и второго счетчика 12 соединены с информационными входами первого регистра 13 и второго регистра 14 соответственно, выходы которых соединены с адресными входами ПЗУ 15, чьи информационные выходы соединены со входами блока индикации 16; выход компаратора 9 соединен со счетными входами первого триггера 17 и третьего триггера 19, а также со вторыми входами первого элемента ИЛИ-НЕ 23 и второго элемента ИЛИ-НЕ 24; первый вход первого элемента И 21 соединен с выходом  синхрогенератора 7, выход первого элемента И 21 соединен с информационным входом первого триггера 17; первый вход второго элемента И 22 соединен с выходом STR/2 синхрогенератора 7, выход второго элемента И 22 соединен с информационным входом третьего триггера 19, вторые входы первого элемента И 21 и второго элемента И 22 соединены с выходом
синхрогенератора 7, выход первого элемента И 21 соединен с информационным входом первого триггера 17; первый вход второго элемента И 22 соединен с выходом STR/2 синхрогенератора 7, выход второго элемента И 22 соединен с информационным входом третьего триггера 19, вторые входы первого элемента И 21 и второго элемента И 22 соединены с выходом  синхрогенератора 7; прямой выход первого триггера 17 соединен со входом разрешения счета первого счетчика 11, инверсный выход первого триггера 17 соединен с первым входом первого элемента ИЛИ-НЕ 23, выход которого соединен со входом сброса второго триггера 18, чей инверсный выход соединен со входом сброса первого триггера 17; прямой выход третьего триггера 19 соединен со входом разрешения счета второго счетчика 12, инверсный выход третьего триггера 19 соединен с первым входом второго элемента ИЛИ-НЕ 24, чей выход соединен со входом сброса четвертого триггера 20, инверсный выход которого соединен со входом сброса третьего триггера 19.
синхрогенератора 7; прямой выход первого триггера 17 соединен со входом разрешения счета первого счетчика 11, инверсный выход первого триггера 17 соединен с первым входом первого элемента ИЛИ-НЕ 23, выход которого соединен со входом сброса второго триггера 18, чей инверсный выход соединен со входом сброса первого триггера 17; прямой выход третьего триггера 19 соединен со входом разрешения счета второго счетчика 12, инверсный выход третьего триггера 19 соединен с первым входом второго элемента ИЛИ-НЕ 24, чей выход соединен со входом сброса четвертого триггера 20, инверсный выход которого соединен со входом сброса третьего триггера 19.
Устройство для автоматического определения изменений угловой координаты объекта работает следующим образом. Излучение от лазерного источника засвечивает все три приемных зеркала 1, 2 и 3 одновременно. После отражения от приемного зеркала 1 и зеркала 4 в область анализа попадает излучение от одного из участков волнового фронта. Излучение от второго участка попадает в область анализа после отражения от приемного зеркала 2, зеркала 4, зеркала 5 и прохождения через зеркало 4. За последним два пучка взаимодействуют и образуют интерференционную картину, положение и вид интерференционных полос в которой зависит от положения источника излучения относительно приемных зеркал 1 и 2. Аналогично работает второй канал, где первый пучок проходит то же путь, а второй отражается от приемного зеркала 3, а затем также проходит путь, аналогичный первому каналу, но отражаясь от других участков зеркал 4 и 5. В плоскости анализа образуются и регистрируются линейным фоточувствительным прибором с зарядовой связью 6 две интерференционные картины с шагом полос, некратным друг другу. Смещение объекта на угол α относительно оптической оси угломера приведет к изменению положения интерференционной картины на величину x/eп в фиксированной точке плоскости анализа. Тогда, (1)
(1)
где λ - длина волны источника излучения, x - смещение объекта в плоскости, перпендикулярной оптической оси угломера, D - расстояние между парой приемных зеркал, eп - линейная ширина полосы при α ≠ 0.
Из элементарных геометрических соображений следует, что в четырехзеркальной схеме изменение угла α приводит к изменению угла сходимости на величину 2α, что обуславливает изменение линейной ширины полосы. Тогда угол рассогласования (2)
(2)
где Δe = eп-eoп, eоп - опорная ширина полосы, соответствующая нулевому смещению источника (α = 0).
Подставляя Δe в (2), получим: (3)
(3)
Так как величина eоп в каждом из каналов и λ для данного угломера постоянны и не изменяются в процессе измерения, то линейная ширина полосы eп зависит только от угла рассогласования α. Однако, так как опорная ширина полосы неизвестна, то это служит источником неоднозначности, для устранения которой введен второй канал. Измерив текущую ширину полосы в обоих каналах, можно определить угловое смещение (величину угла α ).
В начале цикла измерения с входа STR синхрогенератора 7 на входы сброса счетчиков 11 и 12 и на входы установки в "единицу" триггеров 18 и 20 поступает импульс (фиг. 2е), сбрасывая счетчики 11 и 12 и устанавливая триггеры 18 и 20 в единичное состояние. С инверсных выходов триггеров 18 и 20 логический ноль поступает на входы сброса триггеров 17 и 19 соответственно (фиг. 2з и фиг. 2л), разрешая тем самым их работу. На выходе линейного фоточувствительного прибора с зарядовой связью 6 получаем аналоговый сигнал, однозначно соответствующий проецируемой интерференционной картине (фиг. 2а). Сигнал с выхода линейного фоточувствительного прибора с зарядовой связью 6 усиливается усилителем 8 и поступает на первый вход компаратора 9, на второй вход которого подается опорное напряжение. На выходе компаратора 6 получим дискретный последовательный сигнал (фиг. 2б). С выхода синхрогенератора 7  на первый вход первого элемента И 21 поступает импульс, равный половине длительности времени накопления линейного фоточувствительного прибора с зарядовой связью 6, причем передний фронт импульса соответствует координате начала линии сканирования линейного фоточувствительного прибора с зарядовой связью 6, а задний фронт - координате середины линии сканирования (фиг. 2г), на второй вход этого же элемента подается импульс с выхода синхрогенератора 7
на первый вход первого элемента И 21 поступает импульс, равный половине длительности времени накопления линейного фоточувствительного прибора с зарядовой связью 6, причем передний фронт импульса соответствует координате начала линии сканирования линейного фоточувствительного прибора с зарядовой связью 6, а задний фронт - координате середины линии сканирования (фиг. 2г), на второй вход этого же элемента подается импульс с выхода синхрогенератора 7  передний фронт которого соответствует координате одной четвертой линии сканирования, а задний фронт - координате середины линии сканирования (фиг. 2е). При появлении двух логических единиц на первом и втором входе первого элемента И 21 логическая единица с выхода этого элемента поступает на информационный вход первого триггера 17. По переднему фронту импульса, поступающего с выхода компаратора 9, триггер 17 переходит в состояние логической единицы (фиг 2ж), которая подается на разрешающий вход счетчика 11. Счетчик 11 осуществляет подсчет импульсов, поступающих на его счетный вход с выхода генератора 10 (фиг. 2м). Логический ноль с инверсного выхода первого триггера 17 поступает на первый вход первого элемента ИЛИ-НЕ 23, при поступлении логического ноля на второй вход первого элемента ИЛИ-НЕ 23 с выхода компаратора 9, логическая единица с выхода элемента ИЛИ-НЕ 23 поступит на вход сброса второго триггера 18, переводя его в состояние логического ноля. Логическая единица с инверсного выхода второго триггера 18 (фиг. 2з) поступит на вход сброса первого триггера 17, на выходе которого появится логический ноль (фиг. 2ж), запрещающий счетчику 11 дальнейший подсчет импульсов с выхода генератора 10 (фиг. 2м). Таким образом, на выходе счетчика 11 будет получен цифровой код линейной ширины полосы первой интерференционной картины, проецируемой на первую половину фоточувствительного слоя линейного фоточувствительного прибора с зарядовой связью 6.
передний фронт которого соответствует координате одной четвертой линии сканирования, а задний фронт - координате середины линии сканирования (фиг. 2е). При появлении двух логических единиц на первом и втором входе первого элемента И 21 логическая единица с выхода этого элемента поступает на информационный вход первого триггера 17. По переднему фронту импульса, поступающего с выхода компаратора 9, триггер 17 переходит в состояние логической единицы (фиг 2ж), которая подается на разрешающий вход счетчика 11. Счетчик 11 осуществляет подсчет импульсов, поступающих на его счетный вход с выхода генератора 10 (фиг. 2м). Логический ноль с инверсного выхода первого триггера 17 поступает на первый вход первого элемента ИЛИ-НЕ 23, при поступлении логического ноля на второй вход первого элемента ИЛИ-НЕ 23 с выхода компаратора 9, логическая единица с выхода элемента ИЛИ-НЕ 23 поступит на вход сброса второго триггера 18, переводя его в состояние логического ноля. Логическая единица с инверсного выхода второго триггера 18 (фиг. 2з) поступит на вход сброса первого триггера 17, на выходе которого появится логический ноль (фиг. 2ж), запрещающий счетчику 11 дальнейший подсчет импульсов с выхода генератора 10 (фиг. 2м). Таким образом, на выходе счетчика 11 будет получен цифровой код линейной ширины полосы первой интерференционной картины, проецируемой на первую половину фоточувствительного слоя линейного фоточувствительного прибора с зарядовой связью 6.
С выхода синхрогенератора 7 STR/2 на первый вход второго элемента И 22 поступает импульс, равный половине длительности времени накопления линейного фоточувствительного прибора с зарядовой связью 6, причем передний фронт импульса соответствует координате середины линии сканирования линейного фоточувствительного прибора с зарядовой связью 6, а задний фронт - координате конца линии сканирования (фиг. 2д), на второй вход этого же элемента подается импульс с выхода синхрогенератора 7  передний фронт которого соответствует координате трех четвертей линии сканирования, а задний фронт - координате конца линии сканирования (фиг. 2е). При появлении двух логических единиц на первом и втором входе второго элемента И 22 логическая единица с выхода этого элемента поступает на информационный вход третьего триггера 19. По переднему фронту импульса, поступающего с выхода компаратора 9, триггер 19 переходит в состояние логической единицы (фиг. 2к), которая подается на разрешающий вход счетчика 12. Счетчик 12 осуществляет подсчет импульсов, поступающих на его счетный вход с выхода генератора 10 (фиг. 2н). Логический ноль с инверсного выхода третьего триггера 19 поступает на первый вход второго элемента ИЛИ-НЕ 24, при поступлении логического ноля на второй вход второго элемента ИЛИ-НЕ 24 с выхода компаратора 9 логическая единица с выхода элемента ИЛИ-НЕ 24 поступит на вход сброса четвертого триггера 20, переводя его в состояние логического ноля. Логическая единица с инверсного выхода четвертого триггера 20 (фиг. 2л) поступит на вход сброса третьего триггера 19, на выходе которого появится логический ноль (фиг. 2к), запрещающий счетчику 12 дальнейший подсчет импульсов с выхода генератора 10 (фиг. 2н). Таким образом, на выходе счетчика 12 будет получен цифровой код линейной ширины полосы второй интерференционной картины, проецируемой на вторую половину фоточувствительного слоя линейного фоточувствительного прибора с зарядовой связью 6.
передний фронт которого соответствует координате трех четвертей линии сканирования, а задний фронт - координате конца линии сканирования (фиг. 2е). При появлении двух логических единиц на первом и втором входе второго элемента И 22 логическая единица с выхода этого элемента поступает на информационный вход третьего триггера 19. По переднему фронту импульса, поступающего с выхода компаратора 9, триггер 19 переходит в состояние логической единицы (фиг. 2к), которая подается на разрешающий вход счетчика 12. Счетчик 12 осуществляет подсчет импульсов, поступающих на его счетный вход с выхода генератора 10 (фиг. 2н). Логический ноль с инверсного выхода третьего триггера 19 поступает на первый вход второго элемента ИЛИ-НЕ 24, при поступлении логического ноля на второй вход второго элемента ИЛИ-НЕ 24 с выхода компаратора 9 логическая единица с выхода элемента ИЛИ-НЕ 24 поступит на вход сброса четвертого триггера 20, переводя его в состояние логического ноля. Логическая единица с инверсного выхода четвертого триггера 20 (фиг. 2л) поступит на вход сброса третьего триггера 19, на выходе которого появится логический ноль (фиг. 2к), запрещающий счетчику 12 дальнейший подсчет импульсов с выхода генератора 10 (фиг. 2н). Таким образом, на выходе счетчика 12 будет получен цифровой код линейной ширины полосы второй интерференционной картины, проецируемой на вторую половину фоточувствительного слоя линейного фоточувствительного прибора с зарядовой связью 6.
С выхода синхрогенератора 7 STR на вход разрешения записи регистров 13 и 14 поступает импульс (фиг. 2в), по положительному фронту которого содержимое первого счетчика 11 и второго счетчика 12, соответствующее ширине полосы в первой и второй интерференционной картине, записывается в первый регистр 13 и второй регистр 14 соответственно. С выходов регистров 13 и 14 данные поступают на адресные входы ПЗУ 15. На выходах данных ПЗУ 15 появляется число, соответствующее угловому смещению объекта, поступающее далее на входы блока индикации 16. Частота генератора 10, разрядность счетчиков, регистров, адреса и данных ПЗУ выбираются исходя из требуемой точности измерений.
Таким образом, предложенное решение позволяет значительно повысить удобство считывания результатов измерения угловых перемещений с помощью интерференционного угломера за счет того, что результат измерения выводится на индикацию в единицах измерения угловых величин.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЗИРОВАННОГО ИЗМЕРЕНИЯ МАЛЫХ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1998 |
|
RU2138014C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЗИРОВАННОГО ИЗМЕРЕНИЯ УГЛОВЫХ ВЕЛИЧИН | 1997 |
|
RU2133451C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЗИРОВАННОГО ИЗМЕРЕНИЯ УГЛОВЫХ ВЕЛИЧИН | 1995 |
|
RU2112208C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЗИРОВАННОГО ИЗМЕРЕНИЯ МАЛЫХ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 2007 |
|
RU2353899C1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ АМПЛИТУДЫ ВИДЕОСИГНАЛА | 1999 |
|
RU2150179C1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ АМПЛИТУДЫ ВИДЕОСИГНАЛА | 1996 |
|
RU2119725C1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ АМПЛИТУДЫ ВИДЕОСИГНАЛА | 1998 |
|
RU2137318C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО РОБОТА | 2004 |
|
RU2255853C1 |
| ПАРАЛЛЕЛЬНАЯ СИСТЕМА ПОИСКА ПРОИЗВОЛЬНЫХ ВХОЖДЕНИЙ | 2001 |
|
RU2220448C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО РОБОТА | 2004 |
|
RU2279118C2 |
Устройство для автоматического определения измерений угловой координаты объекта относится к измерительной технике и может быть использовано для высокоточных определений угловой координаты объекта. Устройство содержит лазер, зеркальный блок, линейный фоточувствительный прибор с зарядовой связью (ЛФПЗС), электрическую схему обработки сигнала, включающую синхрогенератор, усилитель, компаратор, генератор, счетчики, триггеры, регистры, элементы ИЛИ-НЕ, элементы И, ПЗУ, блок индикации. В плоскости анализа возникает интерференционная картина, проецируемая на фоточувствительную область ЛФПЗС, вызывая появление видеосигнала на выходе ЛФПЗС. Видеосигнал преобразуется в два двоичных числа, несущих информацию о положении объекта. ПЗУ осуществляет преобразование полученных чисел для отображения угловой координаты объекта блоком индикации. Технический результат - повышение удобства считывания результатов измерения угловых перемещений с помощью интерференционного угломера -достигается за счет того, что результат измерения выводится на индикацию в единицах измерения угловых величин. 2 ил.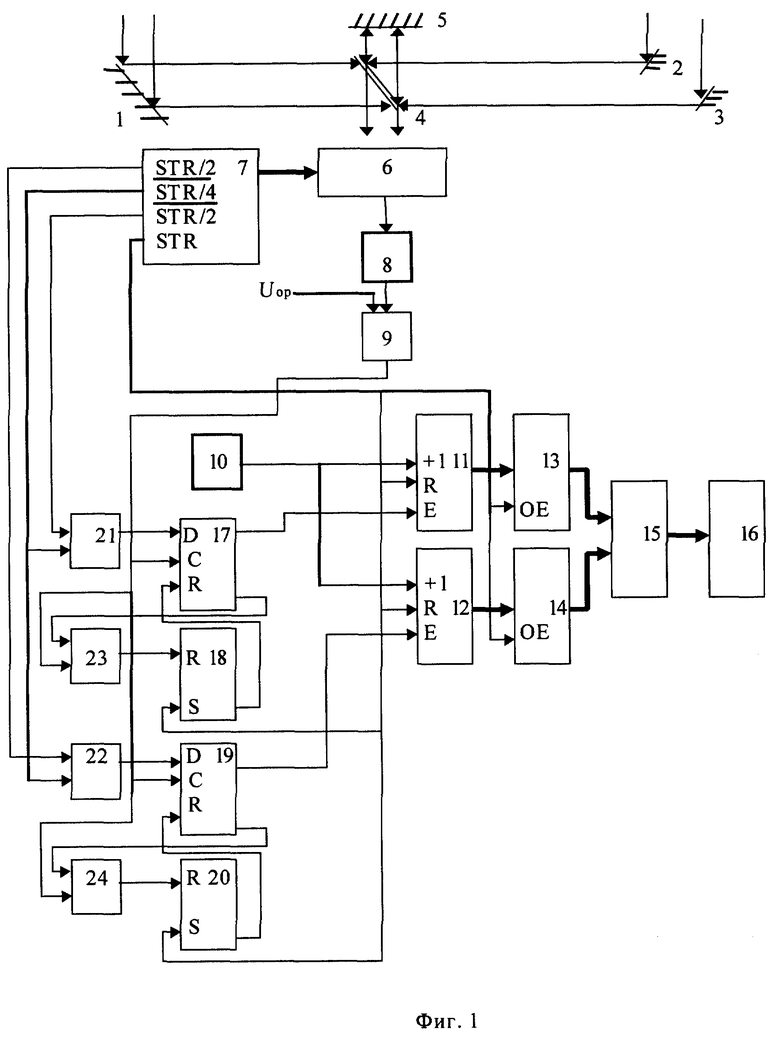
Устройство для автоматического определения изменений угловой координаты объекта, содержащее лазер, предназначенный для скрепления с объектом, зеркальный блок, выполненный в виде разнесенных в плоскости контроля трех входных зеркал, а также направляющих в блок регистрации интерференционную картину глухого и полупрозрачного зеркала, отличающееся тем, что оно снабжено оптически связанным с зеркальным блоком фоточувствительным прибором, выполненным в виде линейного фоточувствительного прибора с зарядовой связью, синхрогенератором, усилителем, компаратором, генератором, первым и вторым счетчиками, первым, вторым, третьим и четвертым триггерами, первым и вторым регистрами, первым и вторым элементами ИЛИ-НЕ, первым и вторым элементами И, ПЗУ, блоком индикации, причем входы линейного фоточувствительного прибора с зарядовой связью соединены с управляющими выходами синхрогенератора, а выход линейного фоточувствительного прибора с зарядовой связью - со входом усилителя, выход которого подключен ко входу компаратора, чей второй вход выполнен с возможностью подачи на него опорного напряжения, выход генератора соединен со счетными входами первого и второго счетчиков, выход STR синхрогенератора соединен со входами сброса первого и второго счетчиков, входами разрешения записи первого и второго регистров и входами установки в единицу второго и четвертого триггеров, информационные выходы первого и второго счетчиков соединены с информационными входами первого и второго регистров соответственно, выходы которых соединены с адресными входами ПЗУ, информационные выходы которого соединены со входами блока индикации, выход компаратора соединен со счетными входами первого и третьего триггеров, а также со вторыми входами первого и второго элементов ИЛИ-НЕ, первый вход первого элемента И соединен с выходом  синхрогенератора, выход первого элемента И соединен с информационным входом первого триггера, первый вход второго элемента И соединен с выходом STR/2 синхрогенератора, выход второго элемента И соединен с информационным входом третьего триггера, вторые входы первого и второго элементов И соединены с выходом
синхрогенератора, выход первого элемента И соединен с информационным входом первого триггера, первый вход второго элемента И соединен с выходом STR/2 синхрогенератора, выход второго элемента И соединен с информационным входом третьего триггера, вторые входы первого и второго элементов И соединены с выходом  синхрогенератора, прямой выход первого триггера соединен со входом разрешения счета первого счетчика, инверсный выход первого триггера соединен с первым входом первого элемента ИЛИ-НЕ, выход которого соединен со входом сброса второго триггера, чей инверсный выход соединен со входом сброса первого триггера, прямой выход третьего триггера соединен со входом разрешения счета второго счетчика, инверсный выход третьего триггера соединен с первым входом второго элемента ИЛИ-НЕ, чей выход соединен со входом сброса четвертого триггера, инверсный выход четвертого триггера соединен со входом сброса третьего триггера.
синхрогенератора, прямой выход первого триггера соединен со входом разрешения счета первого счетчика, инверсный выход первого триггера соединен с первым входом первого элемента ИЛИ-НЕ, выход которого соединен со входом сброса второго триггера, чей инверсный выход соединен со входом сброса первого триггера, прямой выход третьего триггера соединен со входом разрешения счета второго счетчика, инверсный выход третьего триггера соединен с первым входом второго элемента ИЛИ-НЕ, чей выход соединен со входом сброса четвертого триггера, инверсный выход четвертого триггера соединен со входом сброса третьего триггера.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЗИРОВАННОГО ИЗМЕРЕНИЯ УГЛОВЫХ ВЕЛИЧИН | 1995 |
|
RU2112208C1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ определения изменений угловой координаты объекта в плоскости и устройство для его осуществления | 1984 |
|
SU1290063A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ НЕПЛОТНОСТЕЙ В ШВАХ КОНДЕНСАТОРОВ ПАРОВЫХ ТУРБИН | 1936 |
|
SU52967A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Пожарный двухцилиндровый насос | 0 |
|
SU90A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| US 4500200 A, 19.02.1985. | |||
