Изобретение относится к вычислительной технике и может быть использовано в системах технического зрения для управления транспортными средствами типа робокаров, передвигающихся по непересекающимся трассам-ориентирам.
Известно устройство для автоматического вождения трактора по светоконтрастной программе (А.С. №872325 СССР, кл. В 60 К 31/00, 1981 г., Бюл. №38), содержащее фотооптический датчик с фотоэлектронным умножителем в качестве светочувствительного элемента, многозвенный делитель напряжения, усилитель, интегратор, регулирующий элемент, блок управления, фотооптический датчик, блок управляемых сопротивлений.
Недостатком этого устройства является низкая надежность в работе, низкое качество обработки изображения.
Наиболее близким к предлагаемому является устройство для автоматического вождения хлопкоуборочной машины (А.С. №1658851 СССР, кл. А 01 В 69/04, 1991 г., Бюл. №24), содержащее источник импульсов и формирователь сигналов вождения, состоящие из оптического блока, формирователя видеосигналов, усилителя-преобразователя, первого сумматора, второго сумматора, делителя, коммутатора, третьего сумматора, четвертого сумматора, пятого сумматора и узла сравнения. Источник импульсов выдает двухуровневый цифровой сигнал, отражающий расположение раскрытых хлопковых коробочек, который поступает в формирователь сигналов вождения, выполненный в виде схемы определения координаты середины междурядья и координат середин левого и правого хлопковых рядов и выдающий по результату обработки полученного сигнала величину и направление отклонения хлопкоуборочной машины от заданного направления движения и величину отклонения рабочих аппаратов хлопкоуборочной машины от хлопкового ряда.
Недостатком этого устройства является низкая точность обработки изображений.
Технической задачей устройства является повышение точности обработки изображений.
Техническая задача решается тем, что в устройство для автоматического вождения хлопкоуборочной машины, содержащее оптический блок, формирователь видеосигналов, первый усилитель-преобразователь, введены линия задержки, тактовый генератор, второй усилитель-преобразователь, первый счетчик, второй счетчик, первый регистр, второй регистр, третий регистр, четвертый регистр и арифметико-логическое устройство, причем выход оптического блока подключен ко входу формирователя видеосигнала, первый выход которого подключен ко второму входу первого усилителя-преобразователя, второму входу линии задержки, второму входу второго усилителя-преобразователя, входу тактового генератора, второму входу первого счетчика, второму входу второго счетчика, третьему входу первого регистра, третьему входу второго регистра, третьему входу третьего регистра, третьему входу четвертого регистра и пятому входу арифметико-логического устройства, а второй выход формирователя видеосигнала подключен к первому входу линии задержки и к первому входу первого усилителя-преобразователя, чей выход соединен с первым входом первого регистра и первым входом второго регистра, выход которого подключен к четвертому входу арифметико-логического устройства, а второй вход соединен со вторым входом первого регистра и выходом первого счетчика, чей первый вход подключен к выходу тактового генератора и первому входу второго счетчика, выход которого соединен со вторым входом третьего регистра и вторым входом четвертого регистра, выход которого подключен ко второму входу арифметико-логического устройства, первый вход которого соединен с выходом третьего регистра, а третий вход соединен с выходом первого регистра, выход линии задержки подключен к первому входу второго усилителя-преобразователя, выход которого соединен с первым входом третьего регистра и первым входом четвертого регистра.
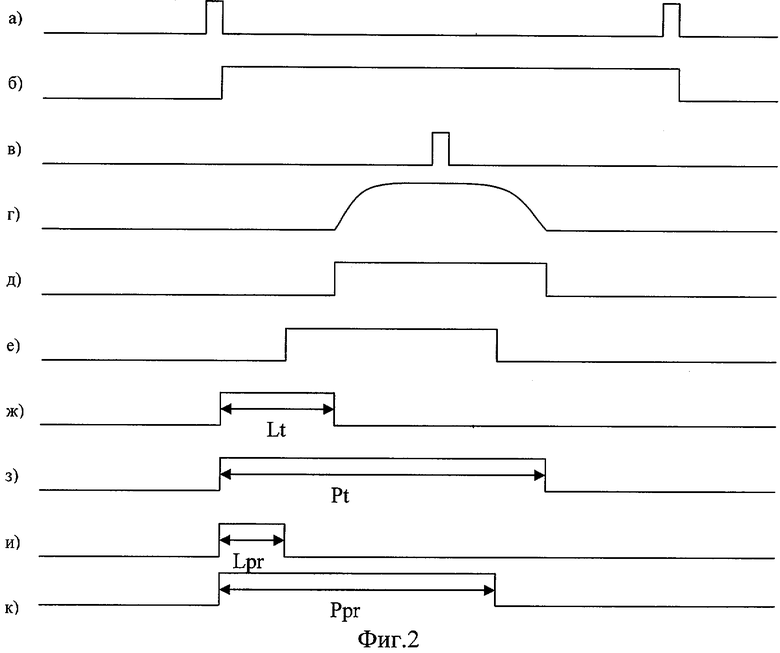
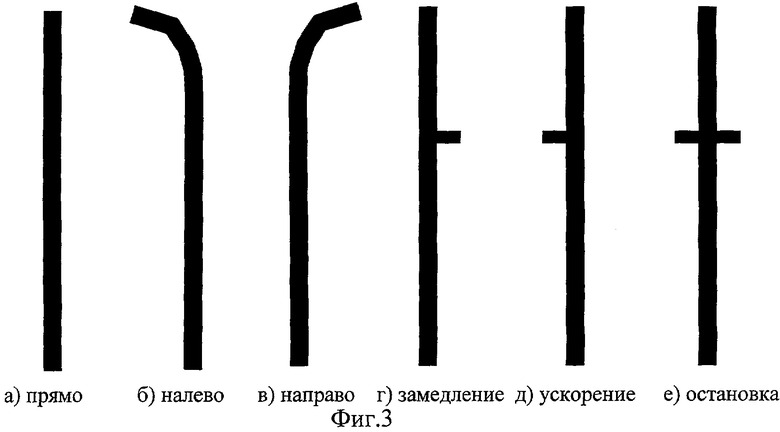
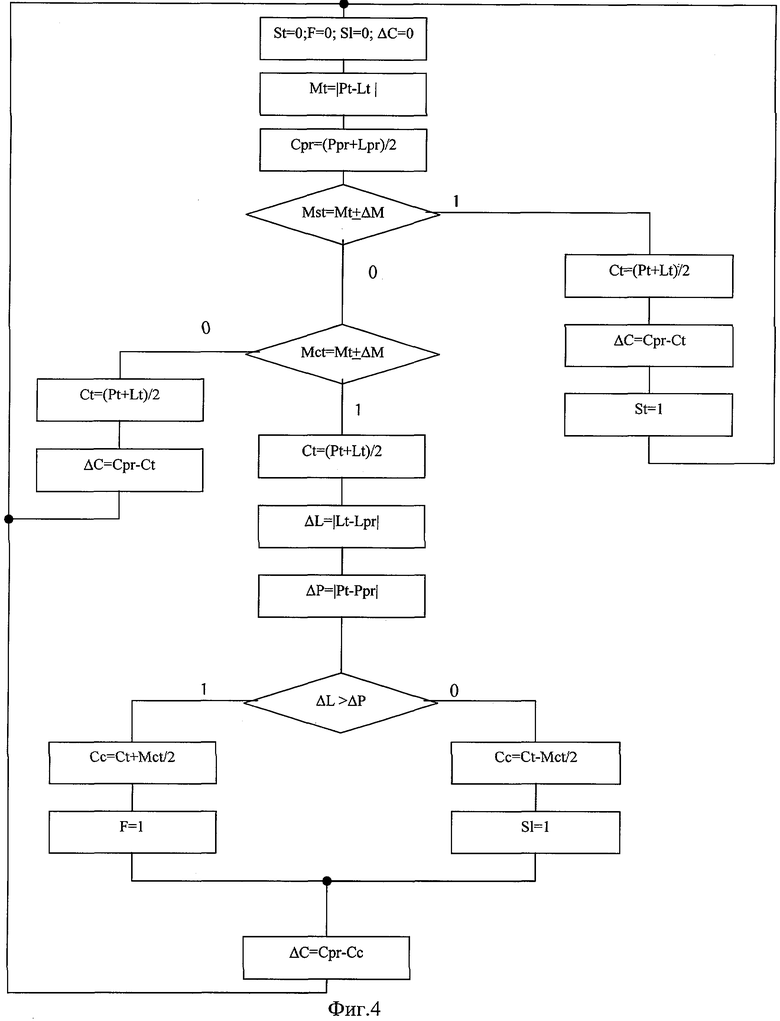
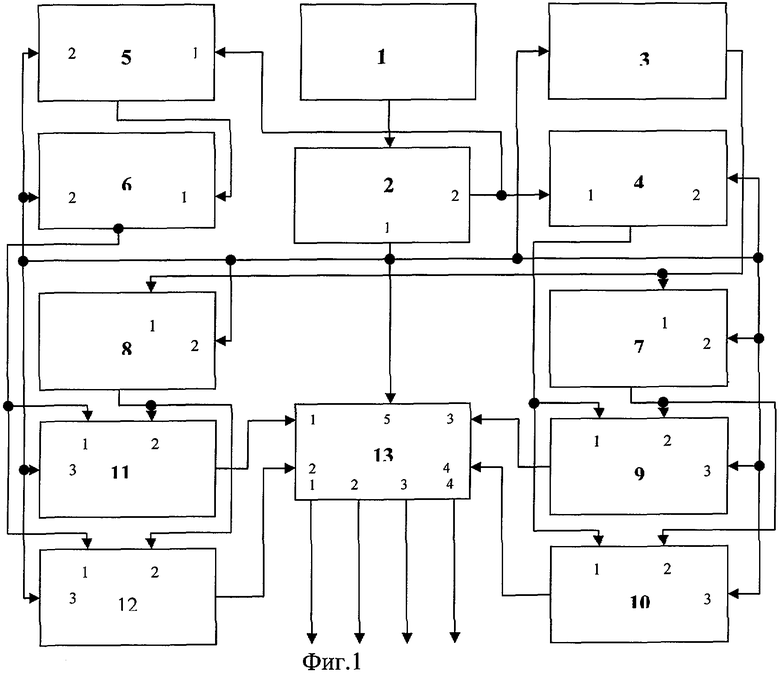
Сущность изобретения поясняется чертежами, где на фиг.1 представлена структурная схема предлагаемого устройства, на фиг.2 представлены диаграммы работы устройства, на фиг.3 показаны типичные виды траектории движения устройства, а на фиг.4 - алгоритм работы арифметико-логического блока.
Устройство для управления движением транспортного робота содержит оптический блок 1, формирователь видеосигналов 2, первый усилитель-преобразователь 4, линию задержки 5, тактовый генератор 3, второй усилитель-преобразователь 6, первый счетчик 7, второй счетчик 8, первый регистр 9, второй регистр 10, третий регистр 11, четвертый регистр 12 и арифметико-логическое устройство 13, причем выход оптического блока 1 подключен ко входу формирователя видеосигнала 2, первый выход которого подключен ко второму входу первого усилителя-преобразователя 4, второму входу линии задержки 5, второму входу второго усилителя-преобразователя 6, входу тактового генератора 3, второму входу первого счетчика 7, второму входу второго счетчика 8, третьему входу первого регистра 9, третьему входу второго регистра 10, третьему входу третьего регистра 11, третьему входу четвертого регистра 12 и пятому входу арифметико-логического устройства 13, а второй выход формирователя видеосигнала подключен к первому входу линии задержки 5 и к первому входу первого усилителя-преобразователя 4, чей выход соединен с первым входом первого регистра 9 и первым входом второго регистра 10, выход которого подключен к четвертому входу арифметико-логического устройства 13, а второй вход соединен со вторым входом первого регистра 9 и выходом первого счетчика 7, чей первый вход подключен к выходу тактового генератора 3 и первому входу второго счетчика 8, выход которого соединен со вторым входом третьего регистра 11 и вторым входом четвертого регистра 12, выход которого подключен ко второму входу арифметико-логического устройства 13, первый вход которого соединен с выходом третьего регистра 11, а третий вход соединен с выходом первого регистра 9, выход линии задержки 5 подключен к первому входу второго усилителя-преобразователя 6, выход которого соединен с первым входом третьего регистра 11 и первым входом четвертого регистра 12.
При установке устройства на транспортном роботе чувствительная область формирователя видеосигнала 2, в качестве которого может быть использован линейный фоточувствительный прибор с зарядовой связью, располагается перпендикулярно продольной оси транспортного робота и направлению движения транспортного робота. В качестве арифметико-логического устройства может быть использована однокристальная микроЭВМ или ПЛИС.
Устройство установлено так, что на чувствительный слой формирователя видеосигнала 2 проецируется линия сканирования, расположенная перпендикулярно направлению движения транспортного робота и длиной D (ширина светоконтрастной трассы на плоскости, по которой движется робот). При движении транспортного робота линия сканирования перемещается, т.е. устройством сканируется участок трассы размером D*i.
Трасса, по которой движется робот, представляет собой светоконтрастную полосу с четкими границами (Фиг. 3,а). Для управления скоростью движения робота перпендикулярно полосе нанесены линии, ширина которых однозначно больше возможного отклонения светоконтрастной полосы за один такт работы устройства. Управляющий маркер, нанесенный слева (Фиг. 3,д), устройство распознает как сигнал к увеличению скорости движения на заданную величину. Управляющий маркер, нанесенный справа (Фиг. 3,г), - как сигнал к уменьшению скорости движения на заданную величину. Управляющие маркеры, нанесенные с обеих сторон светоконтрастной полосы (Фиг. 3,е), - как сигнал к полной остановке. Для обеспечения правильной работы арифметико-логического блока устройства управляющие сигналы увеличения и уменьшения скорости движения наносятся только на прямолинейных участках траектории.
Устройство работает следующим образом.
Видеосигнал от оптического блока 1 поступает на формирователь видеосигнала 2. Формирователь видеосигнала 2 одновременно формирует на первом выходе стробирующий сигнал STR (Фиг. 2,а) и на втором выходе последовательный сигнал, отражающий картину, полученную на входе от оптического блока 1 (Фиг. 2,г), который затем подается на первый вход линии задержки 5 и на первый вход первого усилителя-преобразователя 4. Линия задержки 5 задерживает сигнал, полученный с формирователя видеосигнала 2, на один такт сигнала STR, после чего выдает его на первый вход второго усилителя-преобразователя 6. Таким образом, каждые два такта сигнала STR на выходе первого усилителя-преобразователя 4 получим оцифрованный сигнал, соответствующий текущей картине на входе оптического блока 1 (Фиг. 2,д), а на выходе второго усилителя-преобразователя 6 - оцифрованный сигнал, соответствующий картине на входе оптического блока 1 один такт сигнала STR назад (Фиг. 2,е). По сигналу STR производится сброс/запуск тактового генератора 3 (Фиг. 2,б), импульсные сигналы с выхода которого поступают на счетные входы первого счетчика 7 и второго счетчика 8. Первый регистр 9, второй регистр 10, третий регистр 11, четвертый регистр 12 сбрасываются по сигналу STR. На информационные входы первого регистра 9 и второго регистра 10 поступает сигнал с выхода первого счетчика 7, а на разрешающие входы первого регистра 9 и второго регистра 10 поступает сигнал с выхода первого усилителя-преобразователя 4, причем первый регистр 9 записывает информацию по переднему фронту сигнала, а второй регистр 10 - по заднему. Таким образом на первом регистре 9 получим координату левого края светоконтрастной полосы на текущем считывании Pt (Фиг. 2,ж), а на втором регистре 10 - координату правого края светоконтрастной полосы на текущем считывании Pt (Фиг. 2,з). Аналогичным образом на информационные входы третьего регистра 11 и четвертого регистра 12 поступает сигнал с выхода второго счетчика 8, а на разрешающие входы третьего регистра 11 и четвертого регистра 12 поступает сигнал с выхода второго усилителя преобразователя 6, причем третий регистр 11 записывает информацию по переднему фронту сигнала, а четвертый регистр 12 - по заднему. Таким образом на третьем регистре 11 получим координату левого края светоконтрастной полосы на предыдущем считывании Lpr (Фиг. 2,и), а на четвертом регистре 12 - координату правого края светоконтрастной полосы на предыдущем считывании Ррr (Фиг. 2,к). Затем полученные координаты по сигналу STR поступают в арифметико-логическое устройство 13, где обрабатываются по следующему алгоритму (Фиг.4):
- сбросить все управляющие сигналы
(St=0 - стоп, F=0 - быстрее, Sl=0 - медленнее, ΔС=0 - отклонение);
- подсчитать размер полученного сигнала на текущем шаге
(Mt=|Pt-Lt|);
- вычислить центр светоконтрастной полосы на предыдущем считывании Cpr=(Ppr+Lpr)/2;
- сравнить размер на текущем шаге с заданным размером управляющего сигнала “Стоп” (Mst=Mt±ΔM);
- если размеры совпадают с допустимым отклонением, то:
- вычислить центр светоконтрастной полосы на текущем считывании Ct=(Pt+Lt)/2;
- вычислить отклонение устройства за один такт ΔC=Cpr-Ct;
- устанавить управляющий сигнал St=l;
- иначе:
- сравнить размер на текущем шаге с заданным размером управляющего сигнала “Быстрее/Медленнее” (Mct=Mt±ΔM);
- если размеры не равны с допустимым отклонением, то:
- вычислить центр светоконтрастной полосы на текущем считывании Ct=(Pt+Lt)/2;
- вычислить отклонение устройства за один такт ΔC=Cpr-Ct;
- иначе:
- вычислить центр светоконтрастной полосы на текущем считывании Ct=(Pt+Lt)/2;
- вычислить разность координат левого края светоконтрастной полосы на текущем и предыдущем считываниях ΔL=|Lt-Lpr|;
- вычислить разность координат правого края светоконтрастной полосы на текущем и предыдущем считываниях ΔP=|Pt-Ppr|;
- если разность левых координат ΔL больше разности правых координат ΔР, то распознан сигнал “медленнее”. Для нахождения реального центра светоконтрастной полосы в этих условиях необходимо к найденной координате центра Сс прибавить половину размера управляющего сигнала, т.е. Cc=Ct+Mct/2, установить сигнал Sl=1;
- если разность правых координат ΔР больше разности левых координат ΔL, то распознан сигнал “быстрее”. Для нахождения реального центра светоконтрастной полосы в этих условиях необходимо от найденной координаты центра Сс отнять половину размера управляющего сигнала, т.е. Cc=Ct-Mct/2, установить сигнал F=1;
- вычислить отклонение устройства за один такт ΔC=Cpr-Cc.
По завершению работы алгоритма на выходах арифметико-логического устройства 13 получаем следующие сигналы: 1 - ΔC - отклонение устройства за один такт, 2 - St - “Стоп”, 3 - Sl - “Замедление”, 4 - F - “Ускорение”.
Таким образом, предложенное решение позволяет существенно повысить точность обработки изображений за счет введения в устройство линии задержки, тактового генератора, второго усилителя-преобразователя, первого и второго счетчиков, первого, второго, третьего и четвертого регистров, арифметико-логического устройства и использования эффективного алгоритма обработки полученной информации в арифметико-логическом устройстве.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО РОБОТА | 2003 |
|
RU2249841C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО РОБОТА | 2004 |
|
RU2279118C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО РОБОТА | 2004 |
|
RU2263021C1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ИЗОБРАЖЕНИЙ | 1990 |
|
RU2006941C1 |
| Устройство для считывания изображений | 1986 |
|
SU1383417A1 |
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ИЗОБРАЖЕНИЙ ПО БАЗОВОМУ ИНТЕГРАЛЬНОМУ МЕТОДУ (БИМ) | 1996 |
|
RU2162247C2 |
| Устройство для распознавания контуров изображений | 1983 |
|
SU1156103A1 |
| Устройство для управления считыванием графической информации | 1986 |
|
SU1334170A1 |
| Устройство для автоматической фокусировки луча электронно-лучевой трубки | 1985 |
|
SU1307602A2 |
| СИСТЕМА ДЛЯ ОБРАБОТКИ ИЗОБРАЖЕНИЙ | 1990 |
|
RU2006942C1 |
Изобретение относится к вычислительной технике и может быть использовано в системах технического зрения для управления транспортными средствами типа робокаров, передвигающихся по непересекающимся трассам-ориентирам. Технический результат - повышение точности обработки изображений. Устройство согласно изобретению содержит оптический блок, формирователь видеосигналов, первый усилитель-преобразователь, введены линия задержки, тактовый генератор, второй усилитель-преобразователь, первый счетчик, второй счетчик, первый регистр, второй регистр, третий регистр, четвертый регистр и арифметико-логическое устройство. Выделение контуров изображения осуществляется последовательной обработкой строки изображения. При этом производится подсчет координат левого края светоконтрастной полосы, правого края светоконтрастной полосы и ее середины и сравнение полученных координат с аналогичными, полученными при предыдущем считывании. 4 ил.
Устройство для управления движением транспортного робота, содержащее оптический блок, формирователь видеосигналов, первый усилитель-преобразователь, отличающееся тем, что дополнительно введены линия задержки, тактовый генератор, второй усилитель-преобразователь, первый счетчик, второй счетчик, первый регистр, второй регистр, третий регистр, четвертый регистр и арифметико-логическое устройство, при этом трасса движения робота выполнена в виде светоконтрастной полосы с нанесенными на нее маркерами, а оптический блок и формирователь видеосигнала выполнены с возможностью сканирования светоконтрастной полосы, причем выход оптического блока подключен ко входу формирователя видеосигнала, первый выход которого подключен ко второму входу первого усилителя-преобразователя, второму входу линии задержки, второму входу второго усилителя-преобразователя, входу тактового генератора, второму входу первого счетчика, второму входу второго счетчика, третьему входу первого регистра, третьему входу второго регистра, третьему входу третьего регистра, третьему входу четвертого регистра и пятому входу арифметико-логического устройства, а второй выход формирователя видеосигнала подключен к первому входу линии задержки и к первому входу первого усилителя-преобразователя, чей выход соединен с первым входом первого регистра и первым входом второго регистра, выход которого подключен к четвертому входу арифметико-логического устройства, а второй вход соединен со вторым входом первого регистра и выходом первого счетчика, чей первый вход подключен к выходу тактового генератора и первому входу второго счетчика, выход которого соединен со вторым входом третьего регистра и вторым входом четвертого регистра, выход которого подключен ко второму входу арифметико-логического устройства, первый вход которого соединен с выходом третьего регистра, а третий вход соединен с выходом первого регистра, выход линии задержки подключен к первому входу второго усилителя-преобразователя, выход которого соединен с первым входом третьего регистра и первым входом четвертого регистра.
| Устройство для автоматического вождения хлопкоуборочной машины | 1989 |
|
SU1658851A2 |
| DE 3925275 A1, 07.02.1991 | |||
| СПОСОБ ПОЛУЧЕНИЯ МОНОАРЙЛМОЧЕВЙНiiw | 0 |
|
SU173747A1 |
| US 5219258 A, 05.06.1993. | |||

