Настоящее изобретение относится к области измерительной техники, а именно к компенсационным преобразователям линейного ускорения с электростатическим обратным преобразователем.
Известен компенсационный акселерометр, содержащий корпус, первую пластину с подвижным элементом, неподвижным элементом и соединяющим их упругим шарниром, вторую и третью пластины, дифференциальный емкостный преобразователь положения подвижного элемента с неподвижными электродами на второй и третьей пластинах, электростатический обратный преобразователь с неподвижными электродами на второй и третьей пластинах, усилитель [1].
Недостатком такого компенсационного акселерометра является ограничение верхнего предела диапазона измеряемых ускорений вследствие неполного использования площади поверхности подвижного элемента для создания компенсационной электростатической силы.
Наиболее близким по технической сущности является компенсационный акселерометр [2] , содержащий корпус, первую пластину из монокристаллического материала, в которой образованы неподвижный элемент, подвижный элемент и соединяющий их упругий шарнир, вторую и третью пластины, дифференциальный емкостный преобразователь, образованный электропроводной поверхностью подвижного элемента и неподвижными электродами на второй и третьей пластинах, причем первая пластина размещена между второй и третьей пластинами с образованием межэлектродного промежутка между подвижным электродом и каждым неподвижным электродом, подвижный электрод подсоединен к источнику опорного напряжения постоянного тока и к входу усилителя, а каждый неподвижный электрод подключен к одной из фаз генератора напряжения переменного тока и к одному из противофазных выходов усилителя.
Такой компенсационный акселерометр обладает недостаточной полосой частот пропускания вследствие ограниченности повышения коэффициента преобразования из-за низкого коэффициента демпфирования.
Техническим результатом изобретения является повышение верхнего предела полосы частот пропускания компенсационного акселерометра.
Указанный технический результат достигается в компенсационном акселерометре, содержащем корпус, первую пластину из монокристаллического материала, в которой образованы неподвижный элемент, подвижный элемент и соединяющий их упругий шарнир, вторую и третью пластины, дифференциальный емкостный преобразователь, образованный электропроводной поверхностью подвижного элемента и неподвижными электродами на второй и третьей пластинах, причем первая пластина размещена между второй и третьей пластинами с образованием межэлектродного промежутка между подвижным электродом и каждым неподвижным электродом, подвижный электрод подсоединен к источнику опорного напряжения постоянного тока и к входу усилителя, а каждый неподвижный электрод дифференциального емкостного преобразователя подключен к одной из фаз генератора переменного тока и к одному из противофазных выходов усилителя, тем, что корпус заполнен газом, на неподвижных электродах расположены накладки из электроизоляционного материала, при этом близлежащие поверхности накладок и подвижного элемента и газовая среда в рабочем промежутке между ними образуют газовый демпфер, а верхний предел частот fв полосы пропускания акселерометра на уровне 3 дБ, определяется из соотношения
где dр - рабочий промежуток между близлежащими поверхностями накладок и подвижного элемента;
S - площадь перекрытия близлежащих поверхностей накладок и подвижного элемента;
η - динамическая вязкость газовой среды;
K1 - коэффициент преобразования перемещения подвижного элемента в электрический сигнал;
K2 - коэффициент преобразования усилителя;
K3 - коэффициент преобразования напряжения источника опорного напряжения и выходных напряжений усилителя в механическую силу.
В одном частном случае в компенсационном акселерометре неподвижные электроды дифференциального емкостного преобразователя выполнены в теле второй и третьей пластин, при этом расстояние между поверхностями каждой пластины и соответствующего неподвижного электрода составляет часть межэлектродного промежутка.
Во втором частном случае в компенсационном акселерометре первая, вторая и третья пластины выполнены из монокристаллического материала, например кремния.
В третьем частном случае в компенсационном акселерометре каждый неподвижный электрод дифференциального емкостного преобразователя выполнен в виде имплантированного слоя легирующего материала, например бора.
В четвертом частном случае в компенсационном акселерометре каждая накладка выполнена в виде слоя соответственно второй или третьей пластины от ее поверхности до имплантированного слоя легирующего материала.
Путем заполнения корпуса газом, выполнения на неподвижных электродах дифференциального емкостного преобразователя накладок из электроизоляционного материала с образованием промежутка между подвижным элементом и накладкой, выполнения газового демпфера, образованного поверхностями накладок и подвижного элемента, а также газовой средой в рабочем промежутке обеспечивается повышенное демпфирование движения подвижного элемента. В результате достигается повышение коэффициента преобразования сигнала в цепи прямой передачи следящей системы компенсационного акселерометра, при котором полоса частот пропускания может быть обеспечена на уровне современных требований к компенсационному акселерометру, составляющих около 1 кГц.
На фиг. 1 представлен общий вид компенсационного акселерометра, на фиг. 2 - один частный случай выполнения компенсационного акселерометра, на фиг. 3 - другой частный случай выполнения компенсационного акселерометра, на фиг. 4 - электрическая схема компенсационного акселерометра.
Компенсационный акселерометр (фиг. 1) содержит корпус 1, установленную в нем первую пластину 2 из монокристаллического материала, например кремния, в котором образованы неподвижный элемент 3, подвижный элемент 4 с электропроводной поверхностью 5 на двух сторонах подвижного элемента 4. Подвижный элемент 4 первой пластины 2 соединен с неподвижным элементом 3 посредством упругого шарнира 6 в виде двух упругих перемычек. В корпусе 1 установлены вторая пластина 7 с одним неподвижным электродом 8 дифференциального емкостного преобразователя и накладкой 9 на нем, а также третья пластина 10 с другим неподвижным электродом 11 и накладкой 12 на нем. Вторая пластина 7 и третья пластина 10 выполнены из электроизоляционного материала и на них образованы неподвижные электроды 8, 11, например, напылением слоя алюминия. Накладки 9, 12 расположены соответственно на неподвижных электродах 8, 11 и могут быть выполнены либо в виде пластин из электроизоляционного материала, либо путем напыления электроизоляционного материала на неподвижные электроды 8, 11.
Межэлектродный промежуток dэ между поверхностью неподвижного электрода 8 на второй пластине 7 и ближайшей поверхностью 5 подвижного элемента 4 выполнен путем установки платы 13 между первой пластиной 2 и второй пластиной 7. Рабочий промежуток dр между поверхностью накладки 9 и поверхностью 5 подвижного элемента 4 образован за счет выполнения соответствующих толщин неподвижного элемента 8 и накладки 9. Аналогично выполнен рабочий промежуток dр между поверхностью накладки 12 и поверхностью 5 подвижного элемента 4 первой пластины 2.
Величина рабочего промежутка между подвижным элементом и накладкой выполнена не менее величины рабочего хода подвижного элемента на верхнем пределе диапазона измеряемых ускорений.
Межэлектродный промежуток dэ между поверхностью неподвижного электрода 11 на третьей пластине 10 и поверхностью 5 подвижного электрода 4 выполнен путем установки платы 14 между первой пластиной 2 и третьей пластиной 10.
В корпус 1 вставлен ниппель 15, корпус 1 закрыт крышкой 16.
Корпус 1 заполняется газом, например сухим воздухом, через ниппель 15, после чего ниппель 15 запаивается.
Поверхностями накладок 9, 12 и подвижного элемента 4, а также газовой средой в рабочем промежутке между накладками 9, 12 и подвижным элементом 4 образован газовый демпфер.
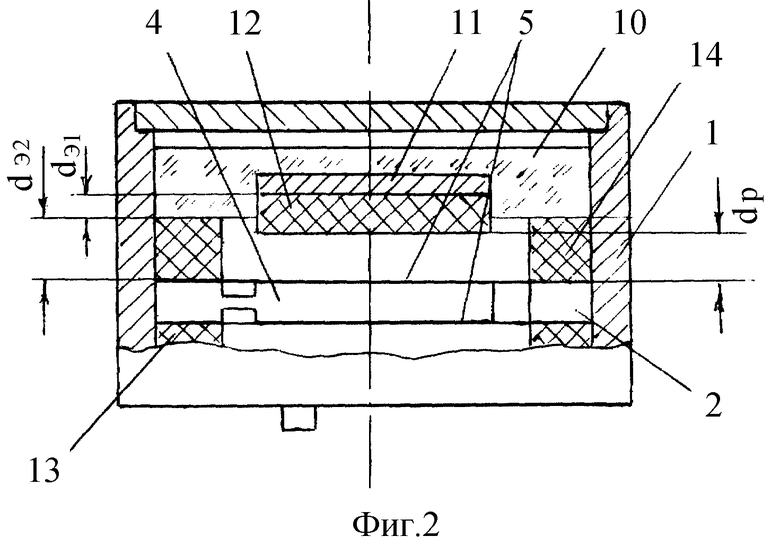
В частном случае выполнения компенсационного акселерометра (фиг. 2), например, в третьей пластине 10 неподвижный электрод 11 дифференциального емкостного преобразователя выполнен в теле третьей пластины 10, так что поверхность неподвижного электрода 11 отстоит от поверхности третьей пластины 10 на расстоянии dэ1 и поверхность третьей пластины 10 расположена на расстоянии dэ2 от поверхности 5 подвижного элемента 4 первой пластины 2. Таким образом, межэлектродный промежуток dэ неподвижного электрода 11 от подвижного элемента 4 составляет
dэ = dэ1 + dэ2. (1)
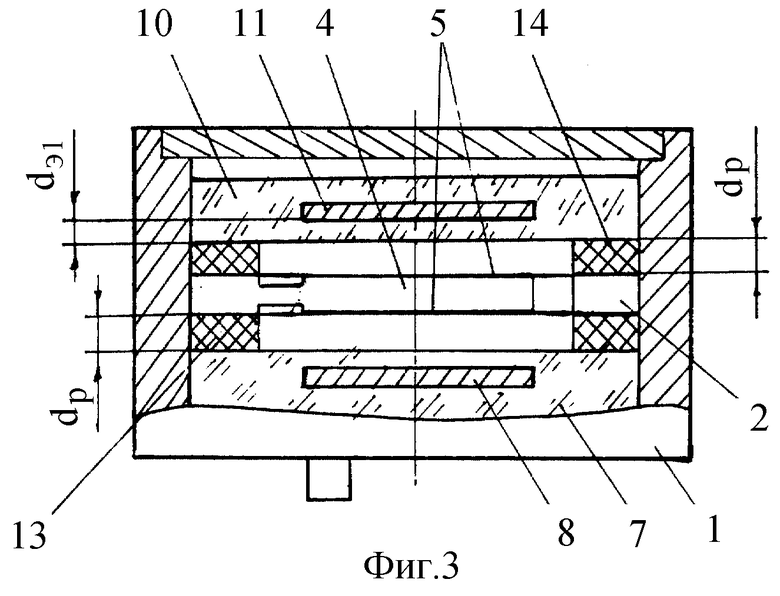
В другом частном случае выполнения компенсационного акселерометра (фиг. 3) вторая пластина 7 и третья пластина 10 выполнены из монокристаллического кремния. Неподвижный электрод 8 и неподвижный электрод 11 выполнены путем имплантации бора на глубину dэ1 в тело пластин 7, 10. При этом между каждым из неподвижных электродов 8, 11 и поверхностью соответственно второй пластины 7 и третьей пластины 11 остается слой пластины толщиной dэ1, который служит в качестве накладки. Рабочие промежутки dр образованы от поверхности 5 с двух сторон подвижного элемента 4 до поверхностей второй пластины 7 и третьей пластины 10 соответственно. Межэлектродный промежуток составляет
dэ = dэ1 + dр. (2)
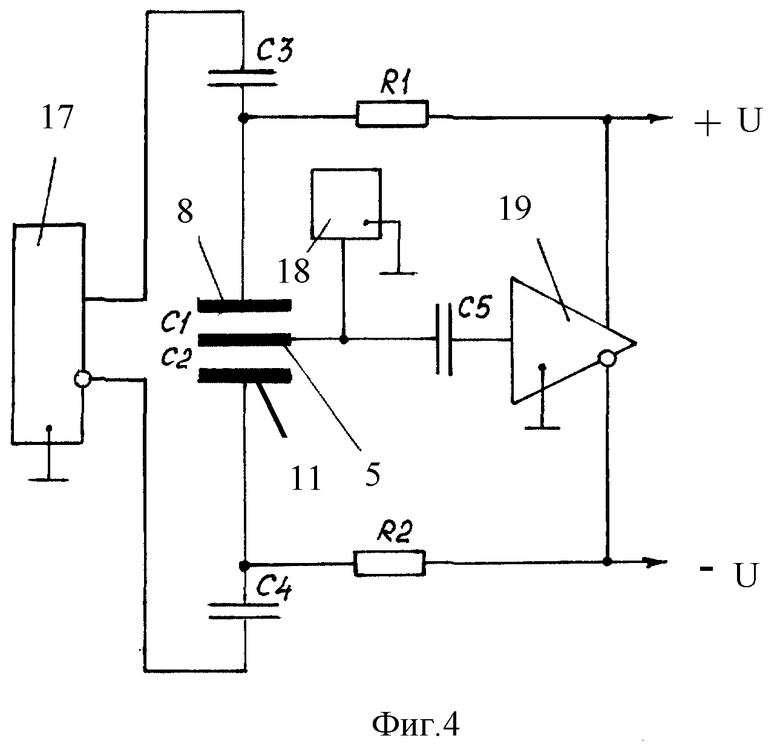
В дифференциальном емкостном преобразователе (фиг. 4) выполнены конденсаторы C1, C2, образованные неподвижными электродами 8, 11 и подвижным электродом в виде электропроводной поверхности 5 подвижного элемента 4 первой пластины 2. К неподвижным электродам 8, 11 через конденсаторы C3, C4 подключены выходы двухфазного генератора напряжения 17 переменного тока.
Подвижный электрод 5 подключен к источнику опорного напряжения 18 постоянного тока и входу усилителя 19 посредством конденсатора C5. Один из противофазных выходов усилителя 19 через резистор R1 подключен к неподвижному электроду 8 дифференциального емкостного преобразователя. Второй противофазный выход усилителя через резистор R2 подключен к неподвижному электроду 11.
Компенсационный акселерометр работает следующим образом. При наличии ускорения a по измерительной оси компенсационного акселерометра, перпендикулярной поверхности 5 подвижного элемента 4, на подвижный элемент действует инерционный момент Mи
M = mal, (3)
где m - масса подвижного элемента;
l - расстояние от оси изгиба упругого шарнира 6 до центра масс подвижного элемента 4.
Под действием момента Mи подвижный элемент 4 отклоняется от своего начального положения, при этом изменяются емкости конденсаторов C1, C2 дифференциального емкостного преобразователя, и с подвижного электрода 5 на вход усилителя 19 поступает сигнал рассогласования следящей системы компенсационного акселерометра.
После преобразования и усиления по амплитуде и мощности сигнала рассогласования в усилителе 19 напряжение с противофазных выходов усилителя 19 подается на неподвижные электроды 8, 11. При взаимодействии электростатических сил от подаваемых на неподвижные электроды 8, 11 напряжений на подвижный элемент 4 воздействует компенсационный момент Mк
где ε - относительная диэлектрическая проницаемость среды в межэлектродном промежутке;
εo - абсолютная диэлектрическая проницаемость;
Sэ - площадь подвижного электрода;
Uо - напряжение источника опорного напряжения;
U - выходное напряжение с каждого из противофазных выходов усилителя.
Посредством компенсационного момента Mк уравновешивается инерционный момент Mи, и рассогласование следящей системы компенсационного акселерометра устраняется. При этом
Mи = Mк. (5)
При подстановке в (5) выражений (3), (4) и преобразовании полученного равенства получается
U = Ka, (6)
где K - коэффициент преобразования компенсационного акселерометра.
Коэффициент демпфирования B (коэффициент при первой производной координаты перемещения в уравнении движения подвижного элемента) в результате действия газового демпфера выражается в виде
где η - динамическая вязкость газа;
S - площадь перекрытия близлежащих поверхностей накладок и подвижного элемента.
Из уравнения движения подвижного элемента следует
где ξ - степень демпфирования;
fо - собственная частота компенсационного акселерометра.
где K - коэффициент преобразования цепи прямой передачи следящей системы компенсационного акселерометра.
K = K1K2K3, (11)
K1 - коэффициент преобразования перемещения подвижного элемента в электрический сигнал;
K2 - коэффициент преобразования усилителя;
K3 - коэффициент преобразования напряжения источника опорного напряжения и выходных напряжений усилителя в механическую силу.
Выражение (10) преобразуется к виду
При подстановке в (12) величины f0 из выражения (9) получается
Коэффициент динамической восприимчивости μ компенсационного акселерометра
где f - частота вынужденных колебаний.
При погрешности в 3 дБ на верхнем пределе полосы частот пропускания акселерометра μ = 0,707.
Отсюда при f = fв и fо > f из выражения (14) следует
При подстановке в выражение (13) значения fо из (15) и значения B из выражения (8) получается
С учетом (11) выражение (16) преобразуется к виду
Компенсационный акселерометр выполнен со степенью демпфирования ξ > 1. При этом обеспечивается верхний предел частоты полосы частот пропускания в соответствии с выражением (17) путем соответствующего выполнения площади контактирующих поверхностей накладок и подвижного элемента, рабочего промежутка и газовой среды газового демпфера, а также коэффициентов преобразования элементов цепи прямой передачи следящей системы компенсационного акселерометра.
Источники информации
1. Авторское свидетельство СССР N 1620944 кл. G 01 P 15/08. Электростатический акселерометр. 1991 г.
2. Электростатический уравновешенный кремниевый акселерометр. НТИ N 2 (63), 1992 г. "Пилотажно-навигационное оборудование за рубежом". Изд. ГОНТИ, 1992 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1998 |
|
RU2149412C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2000 |
|
RU2184380C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2001 |
|
RU2186401C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1998 |
|
RU2137141C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1998 |
|
RU2140652C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2001 |
|
RU2193209C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2003 |
|
RU2246735C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2000 |
|
RU2165624C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2000 |
|
RU2166762C1 |
| ГРАВИМЕТР | 1996 |
|
RU2096813C1 |
Акселерометр предназначен для использования в области измерительной техники в качестве компенсационного преобразователя линейного ускорения с электростатическим обратным преобразователем. В акселерометре, содержащем корпус, первую пластину из монокристаллического материала, в которой образованы неподвижный элемент, подвижный элемент и соединяющий их упругий шарнир, вторую и третью пластины, двухфазный генератор напряжения переменного тока, источник опорного напряжения постоянного тока, дифференциальный емкостный преобразователь с неподвижными электродами на второй и третьей пластинах, усилитель с двумя противофазными выходами, корпус выполнен с газовым заполнением, на каждом неподвижном электроде выполнена накладка из электроизоляционного материала с образованием рабочего промежутка между подвижным элементом и накладкой. Обеспечивается повышение верхнего предела полосы частот пропускания компенсационного акселерометра. 4 з.п.ф-лы, 4 ил.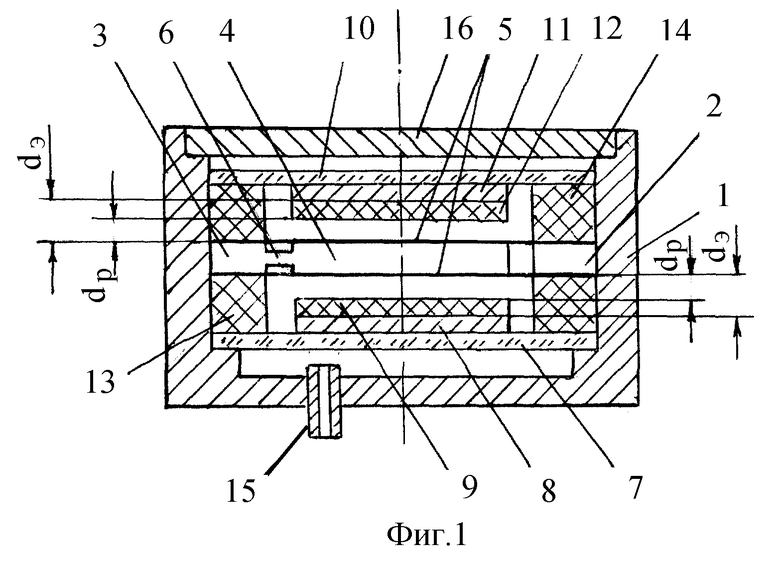
где dp - рабочий промежуток между близлежащими поверхностями накладок и подвижного элемента;
S - площадь перекрытия близлежащих поверхностей накладок и подвижного элемента;
η - динамическая вязкость газовой среды;
К1 - коэффициент преобразования перемещения подвижного элемента в электрический сигнал;
К2 - коэффициент преобразования усилителя;
К3 - коэффициент преобразования напряжения источника опорного напряжения и выходных напряжений усилителя в механическую силу.
| Электростатический уравновешенный кремниевый акселерометр | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Пилотажно-навигационное оборудование за рубежом | |||
| ГОНТИ, 1992 | |||
| АКСЕЛЕРОМЕТР | 1994 |
|
RU2083989C1 |
| АКСЕЛЕРОМЕТР | 1985 |
|
RU2045761C1 |
| US 5616844 A, 01.04.97 | |||
| Автоматический огнетушитель | 0 |
|
SU92A1 |
