Настоящее изобретение относится к области измерительной техники, а именно к информационным преобразователям линейных ускорений.
Известен компенсационный акселерометр [1], содержащий корпус, пластину с неподвижной и подвижной частями, соединенными посредством упругого шарнира, преобразователь положения, дифференциальный магнитоэлектрический силовой преобразователь с кольцевой компенсационной катушкой на подвижной части пластины и двумя магнитными системами в корпусе, причем в каждую магнитную систему входит постоянный магнит.
Наиболее близким по технической сущности является компенсационный акселерометр [2], содержащий корпус, установленную в нем первую пластину, имеющую внешнюю подвижную часть, внутреннюю неподвижную часть и соединяющие их две упругие перемычки, оси изгиба которых образуют ось упругого шарнира, дифференциальный емкостный преобразователь положения с подвижным электродом в виде электропроводной поверхности первой пластины и двумя неподвижными электродами на второй пластине, расположенной на одной стороне неподвижной части первой пластины, третью пластину на второй стороне неподвижной части первой пластины, магнитоэлектрический силовой преобразователь с постоянный магнитом дисковой формы на корпусе и кольцевой компенсационной катушкой на обращенной к постоянному магниту стороне подвижной части первой пластины, по крайней мере один груз, расположенный на стороне подвижной части первой пластины, противоположной постоянному магниту, усилитель.
Недостатком такого компенсационного акселерометра является вибрационная погрешность, обусловленная неудовлетворительной устойчивостью следящей системы компенсационного акселерометра ввиду ограниченности технических средств для введения демпфирования.
Техническим результатом изобретения является повышение точности измерения линейного ускорения.
Данный технический результат достигается в компенсационном акселерометре, содержащем корпус, установленную в нем первую пластину, имеющую внешнюю подвижную часть, внутреннюю неподвижную часть и соединяющие их две упругие перемычки, оси изгиба которых образуют ось упругого шарнира, дифференциальный емкостный преобразователь положения с подвижным электродом в виде электропроводной поверхности первой пластины и двумя неподвижными электродами на второй пластине, расположенной на одной стороне неподвижной части первой пластины, третью пластину на второй стороне неподвижной части первой пластины, магнитоэлектрический силовой преобразователь с постоянным магнитом дисковой формы на корпусе и кольцевой компенсационной катушкой на обращенной к постоянному магниту стороне подвижной части первой пластины, по крайней мере один груз, расположенный на стороне подвижной части первой пластины, противоположной постоянному магниту, усилитель, тем, что компенсационная катушка установлена на четырех грузах, два из которых расположены в двух противоположных положениях по диаметру компенсационной катушки, перпендикулярному оси упругого шарнира, а два груза расположены по оси упругого шарнира, грузы выполнены с внешней поверхностью, совпадающей с внешней цилиндрической поверхностью компенсационной катушки, и с внутренней поверхностью, совпадающей c внутренней цилиндрической поверхностью компенсационной катушки, зазоры между подвижной частью первой пластины и второй и третьей пластинами выполнены величиной 15...30 мкм, с двух сторон относительно оси упругого шарнира неподвижная часть и подвижная часть первой пластины отделены образованными отрезками прямых линий сторонами, расположенными параллельно оси упругого шарнира на расстояниях друг от друга по крайней мере на порядок больших зазора между подвижной частью первой пластины и второй и третьей пластинами, вторая пластина выполнена с расположенными симметрично и параллельно относительно оси упругого шарнира прямыми внешними сторонами, удаленными от оси упругого шарнира на расстояние, не большее расстояния
где r - радиус внутренней цилиндрической поверхности компенсационной катушки;
α - угловое распространение наибольшего из грузов, расположенных на диаметре, перпендикулярном оси упругого шарнира,
в направлении, перпендикулярном плоскости первой пластины, грузы выполнены с размерами по крайней мере на порядок большими зазора между подвижной частью первой пластины и второй и третьей пластины, на второй пластине каждый из неподвижных электродов дифференциального емкостного преобразователя положения выполнен на площади от внешних прямых сторон до прямых сторон, отделяющих подвижную часть от неподвижной части первой пластины, третья пластина выполнена с размерами, не превышающими размеров второй пластины, корпус выполнен герметичным с заполнением газовой средой.
В одном частном случае в компенсационном акселерометре в качестве газовой среды использован сухой азот.
Во втором частном случае в компенсационном акселерометре давление газа выполнено большим атмосферного давления.
В третьем частном случае в компенсационном акселерометре третья пластина выполнена одинаковой по конфигурации со второй пластиной.
Путем выполнения зазоров между подвижной частью первой пластины и второй и третьей пластинами величиной 15...30 мкм, выполнения герметичного корпуса с заполнением газовой средой достигается введение газового демпфера в компенсационный акселерометр, в результате чего повышается устойчивость следящей системы компенсационного акселерометра, уменьшается ее колебательность, а следовательно, уменьшается вибрационная погрешность и повышается точность измерения линейного ускорения.
Посредством выполнения конфигурации грузов, совпадающей с конфигурацией кольцевой компенсационной катушки, отделения подвижной части первой пластины от неподвижной части прямыми сторонами на расстояние, значительно большее зазора между подвижной частью и второй и третьей пластинами, выполнения второй пластины с внешними прямыми сторонами, удаленными от оси упругого шарнира на определяемое расчетным соотношением расстояние, выполнения третьей пластины с размерами, не превышающими размеров второй пластины, выполнения размеров грузов превышающими по крайней мере на порядок, размер зазора обеспечивается перетеканием газовой среды с малым гидравлическим сопротивлением на периферии подвижной части первой пластины при вибрационных воздействиях. Поэтому действующие при вибрационных воздействиях на подвижной элемент силы, возникающие в тонкой газовой пленке между первой пластиной и второй и третьей пластинами, малы и действуют на малом плече. Вследствие уменьшения возмущающих моментов при вибрационных воздействиях уменьшается вибрационная погрешность компенсационного акселерометра, и повышается точность измерения линейного ускорения.
На фиг.1 представлен общий вид компенсационного акселерометра, на фиг.2 - вид первой пластины, на фиг.3 - вид второй пластины, на фиг.4 - электрическая схема компенсационного акселерометра.
В компенсационном акселерометре (фиг.1) в корпусе 1 на стойке 2 установлена первая пластина 3, например, из монокристаллического кремния, имеющая внешнюю подвижную часть 4 и внутреннюю неподвижную часть 5. На стороне 6 неподвижной части 5, отстоящей на расстоянии d от подвижной части 4, расположена вторая пластина 7 с неподвижными электродами 8', 8'' дифференциального емкостного преобразователи положения, подвижным электродом которого является электропроводная поверхность подвижной части 4, образованная легированием монокристаллического кремния бором.
С той же стороны 6 первой пластины 3 установлен дисковый постоянный магнит 9 магнитоэлектрического силового преобразователя, кольцевая компенсационная катушка 10 которого посредством грузов 11; 11'' установлена на подвижной части 4 первой пластины 3.
На стороне 12 неподвижной части 5 первой пластины 3, отстоящей на расстоянии d от подвижной части 4, расположена третья пластина 13. Расстояниями d, составляющими 15...30 мкм, образованы зазоры между первой пластиной 3 и второй 7 и третьей 13 пластинами.
Размеры l1 грузов 11', 11'' в направлении, перпендикулярном плоскости первой пластины 3, выполнены по крайней мере на порядок большими размера зазора между подвижной частью 4 первой пластины 3 и второй 7 и третьей 13 пластинами.
Со стороны 12 первой пластины 3 установлен груз 14.
Первая пластина 3, вторая пластина 7, третья пластина 13, постоянный магнит 9 с диаметральным направлением намагниченности закреплены на стойке 2 корпуса 1 гайкой 15.
Корпус 1 закрыт крышкой 16, загерметизирован и заполнен посредством технологических ниппелей газовой средой, например сухим азотом. Давление газовой среды может быть выполнено меньшим, равным или большим атмосферного давления.
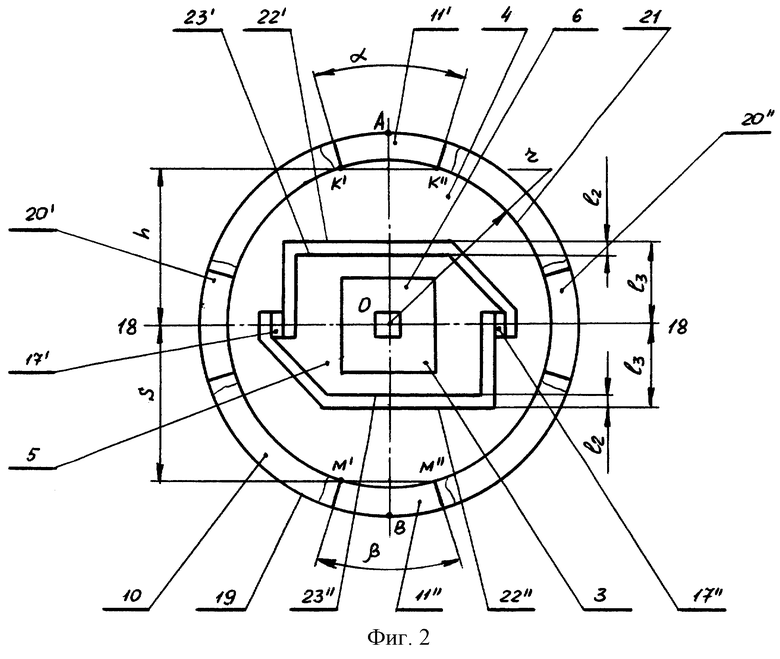
В первой пластине 3 (фиг.2) подвижная часть 4 и неподвижная часть 5 соединены двумя упругими перемычками 17', 17'' оси изгиба которых образуют ось 18-18 упругого шарнира. Со стороны 6 первой пластины 3 на подвижной части 4 компенсационная катушка 10 магнитоэлектрического силового преобразователя установлена на грузах 11', 11'', расположенных на перпендикулярном оси 18', 18'' упругого шарнира диаметре АВ внешней цилиндрической поверхности 19 компенсационной катушки 10. Компенсационная катушка 10 установлена также на грузах 20', 20'', расположенных по оси 18-18 упругого шарнира.
Внешние поверхности грузов 11', 11'', 20', 20'' совпадают с внешней цилиндрической поверхностью 19 компенсационной катушки 10, а внутренние поверхности грузов 11', 11'', 20', 20'' совпадают с внутренней цилиндрической поверхностью 21 компенсационной катушки 10.
Расстояние h между проходящей через находящиеся на внутренней цилиндрической поверхности 21 компенсационной катушки 10 точки К', К'' груза 11' прямой К'-К'' описывается выражением
где r - радиус внутренней цилиндрической поверхности 21 компенсационной катушки 10;
α - угловое распространение груза 11' как наибольшего из грузов 11', 11'', расположенных на диаметре АВ, перпендикулярном оси 18-18 упругого шарнира.
Угол α образован между точками К', К'' относительно центра 0 первой пластины 3.
Расстояние S между проходящей через находящиеся на внутренней цилиндрической поверхности 21 компенсационной катушки 10 точки М', М'' груза 11'' прямой М'-М'''' описывается выражением
где β - угловое распространение груза 11'' как наименьшего из грузов 11', 11''.
Угол β образован между точками М', М'' относительно центра 0 первой пластины 3.
При этом S>h.
По одну сторону от оси 18-18 упругого шарнира подвижная часть 4 отделена от неподвижной части 5 первой пластины 3 стороной 22' в виде отрезка прямой линии на неподвижной части 5 и стороной 23' в виде отрезка прямой линии на неподвижной части 5. По другую сторону от оси 18-18 упругого шарнира подвижная часть 4 отделена от неподвижной части 5 сторонами 22'' и 23''. Стороны 22', 22'', 23', 23'' параллельны оси 18-18 упругого шарнира и находятся на расстояниях l2 друг от друга, превышавших по крайней мере на порядок величину зазора между подвижной частью 4 первой пластины 3 и второй 7 и третьей 13 пластинами. Стороны 22' и 22'' расположены на расстоянии l3 от оси 18-18 упругого шарнира.
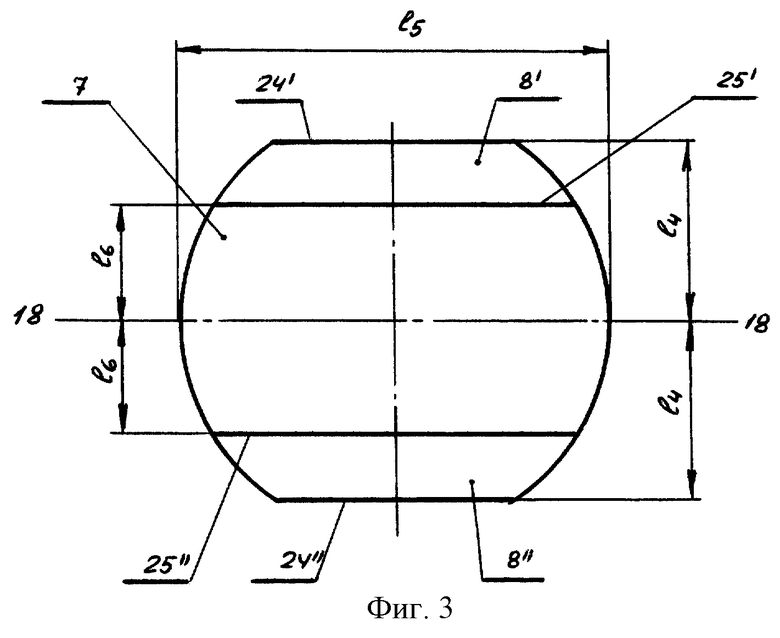
На второй пластине 7 (фиг.3) находящаяся по одну сторону от оси 18-18 упругого шарнира внешняя сторона 24' в виде отрезка прямой линии расположена на расстоянии l4 от оси 18-18 упругого шарнира параллельно ей. Находящаяся по другую сторону от оси 18-18 упругого шарнира внешняя сторона 14'' также отдалена на расстояние l4 от оси 18-18 упругого шарнира и расположена параллельно ей. При этом l4≤h.
Таким образом стороны 24', 24'' второй пластины 7 находятся относительно оси 18-18 упругого шарнира не дальше точек К', К'', М', М'' грузов 11', 11'' на первой пластине 3. Размер l5 второй пластины 7 выполнен меньшим диаметра внутренней цилиндрической поверхности 21 компенсационной катушки 10. Неподвижный электрод 8' образован на площади между внешней стороной 24' второй пластины 7 и стороной 25', расположенной параллельно оси 18-18 упругого шарнира на расстоянии l6 от нее. Неподвижный электрод 8'' дифференциального емкостного преобразователя положения выполнен на площади между внешней стороной 24'' второй пластины 7 и стороной 25'', расположенной параллельно оси 18-18 упругого шарнира на расстоянии l6 от нее. При этом l6=l3.
Размеры третьей пластины 13 выполнены не большими размеров l4, l6 второй пластины 7. Третья пластина 13 может быть выполнена с конфигурацией, аналогичной конфигурации второй пластины 7.
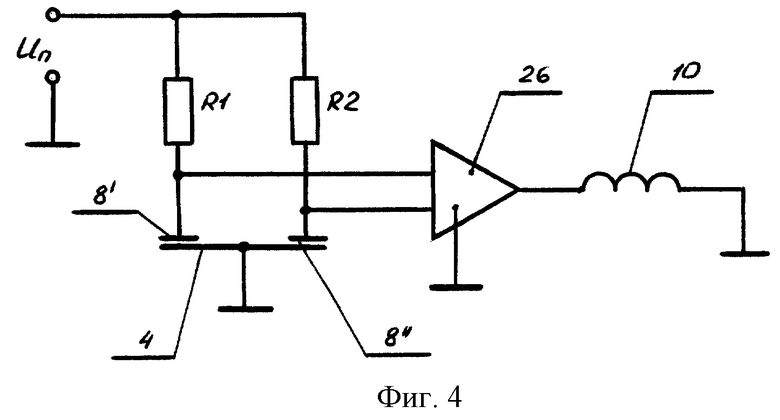
В компенсационном акселерометре (фиг.4) неподвижный электрод 8' соединен с первым выводом резистора R1, неподвижный электрод 8 соединен с первым выводом резистора R2. Вторые выводы резисторов R1, R2 соединены вместе и подключены к выходу источника переменного тока с напряжением Un, второй выход которого подключен к общему проводу. К общему проводу также подключен подвижный электрод дифференциального емкостного преобразователя положения в виде электропроводной поверхности подвижной части 4 первой пластины 3. Точки соединения резисторов R1, R2 с неподвижными электродами 8', 8'' подключены к входу усилителя 26, состоящего из дифференциального усилителя, суммирующего усилителя, демодулятора и усилителя постоянного тока, к выходу которого подключена компенсационная катушка 10 магнитоэлектрического силового преобразователя.
Компенсационный акселерометр работает следующим образом. При наличии линейного ускорения под действием инерционной силы происходит изменение углового положения подвижной части 4, в результате чего изменяются емкости, образованные неподвижными электродами 8', 8'' и подвижным электродом дифференциального емкостного преобразователя положения. На вход усилителя 26 поступает сигнал, который после преобразования и усиления подается на компенсационную катушку 10. В магнитоэлектрическом силовом преобразователе создается компенсационная сила, уравновешивающая инерционную силу, а ток в компенсационной катушке 10 является мерой линейного ускорения.
При вибрационных воздействиях при знакопеременных изменениях положения подвижной части 4 происходит перетекание газовой среды из зазора между подвижной частью 4 первой пластины 3 и второй 7 и третьей 13 пластинами через промежутки между сторонами 22', 23', 22'' 23'' на первой пластине 3, в полость корпуса 1 между внешними сторонами 24', 24'' второй пластины 7 и внешними сторонами третьей пластины 13. Так как выполненными размерами l4 второй пластины 7 и третьей пластины 13 обеспечиваются промежутки между грузами 11', 11'', компенсационной катушкой 10 и второй пластиной 7 и третьей пластиной 13, промежутки l2 между сторонами 22', 23', 22'', 23'' первой пластины, размеры l1 грузов 11', 11'' выполнены по крайней мере на порядок большими зазора d между подвижной частью 4 первой пластины 3 и второй 7 и третьей 13 пластинами, то обеспечивается уменьшение гидравлических сопротивлений перетеканию газовой среды из зазоров в полость корпуса 1 и из одного зазора в другой. При этом уменьшаются действующие на подвижную часть 4 первой пластины силы, возникающие при вибрационных воздействиях. Кроме того, уменьшается плечо действия этих сил вследствие того, что силы действуют на меньшем плече l4, одинаковом вдоль оси 18-18 упругого шарнира вследствие выполнения внешних сторон 24', 24'' второй пластины 7 прямыми линиями, параллельными оси 18-18 упругого шарнира.
Так как газовое демпфирование пропорционально квадрату площади второй пластины 7, совпадающей по контуру с площадью третьей пластины 13, обратно пропорционально кубу зазора d, то при величине зазора 15...30 мкм обеспечивается такое газовое демпфирование в компенсационном акселерометре, что достигается степень демпфирования следящей системы компенсационного акселерометра, близкая к 0,7. При этом при таком зазоре между подвижной частью 4 первой пластины 3 и второй 7 и третьей 13 пластинами, принятых вышеуказанных мерах по уменьшению гидравлических сопротивлений перетеканию газовой среды обеспечивается уменьшение вибрационной погрешности компенсационного акселерометра.
Источники информации
1. Патент Великобритании 2162317А МКИ G 01 P 15/13, НКИ G1К. Акселерометр.
2. Свидетельство на полезную модель РФ 17733, кл. G 01 Р 15/08, 15/13. Компенсационный акселерометр. 2001 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2000 |
|
RU2165624C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2000 |
|
RU2166762C1 |
| АКСЕЛЕРОМЕТР | 2012 |
|
RU2514150C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2013 |
|
RU2545469C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1998 |
|
RU2149411C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2003 |
|
RU2249221C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2000 |
|
RU2184380C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1998 |
|
RU2149412C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2012 |
|
RU2514151C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2001 |
|
RU2186401C1 |
Акселерометр предназначен для использования в области измерительной техники в качестве информационного преобразователя линейных ускорений. Техническим результатом является повышение точности измерения. Акселерометр содержит корпус, первую пластину, имеющую подвижную и неподвижные части и соединяющие их упругие перемычки, дифференциальный емкостный преобразователь положения с неподвижными электродами на второй пластине, магнитоэлектрический силовой преобразователь с постоянным магнитом и компенсационной катушкой, усилитель. Компенсационная катушка установлена на четырех грузах. Грузы выполнены с конфигурацией, подобной конфигурации компенсационной катушки. Вторая пластина имеет прямые стороны, отстоящие от грузов на расстоянии, определяемом расчетным соотношением. Высота грузов, размеры промежутков между подвижной и неподвижными частями по крайней мере на порядок больше зазора в дифференциальном емкостном преобразователе положения. 3 з.п. ф-лы, 4 ил.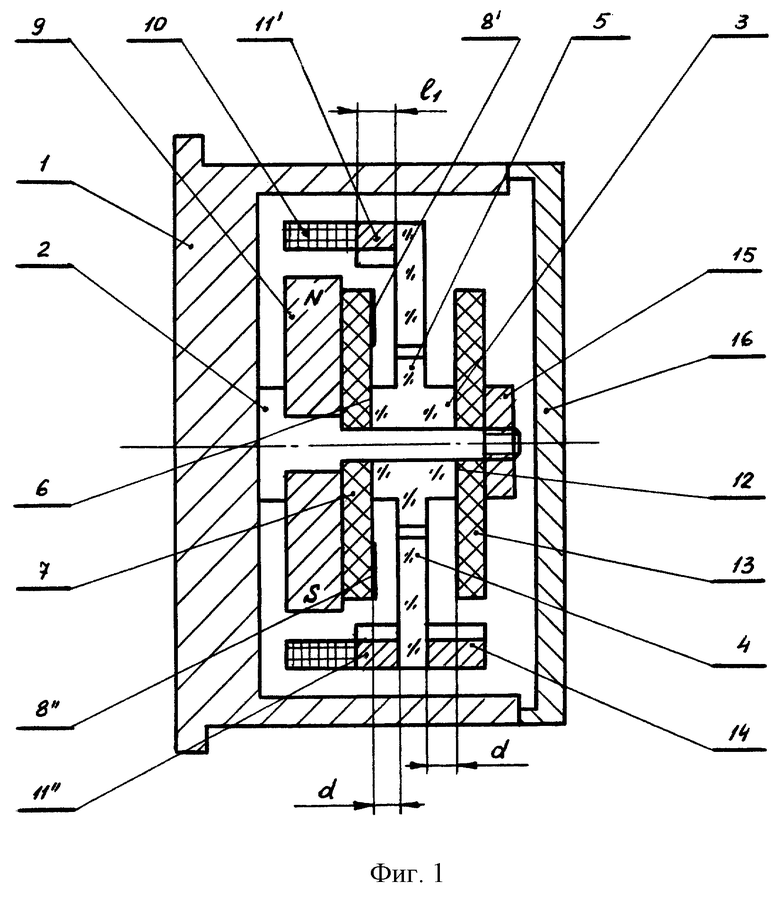

где r - радиус внутренней цилиндрической поверхности компенсационной катушки;
α - угловое распространение наибольшего из грузов, расположенных на диаметре, перпендикулярном оси упругого шарнира,
в направлении, перпендикулярном плоскости первой пластины, грузы выполнены с размерами по крайней мере на порядок большими зазора между подвижной частью первой пластины и второй и третьей пластинами, на второй пластине каждый из неподвижных электродов дифференциального емкостного преобразователя положения выполнен на одной из площадок от внешней прямой стороны до прямой стороны, отделяющей подвижную часть от неподвижной части первой пластины, третья пластина выполнена с размерами, не превышающими размеров второй пластины, корпус выполнен герметичным с заполнением газовой средой.
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2000 |
|
RU2166762C1 |
| Способ изготовления массы для тепловой изоляции | 1929 |
|
SU17733A1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2000 |
|
RU2165624C1 |
| RU 2051542 C2, 27.12.1995 | |||
| US 4498342, 12.02.1985. | |||

