Изобретение относится к судостроению. Оно предназначено для выполнения подводных работ и услуг по следующим направлениям: подводно-поисковым, научно-исследовательским, проектно-изыскательским, экскурсионно-туристическим, производственно-техническим, добывающим, специальным и другим.
Известен плавающий корпус для производства подводно-технических работ, содержащий понтон, полупогружной аппарат, устройство для его спуска, источники электропитания и сжатого воздуха, швартовное и якорное устройства (см. заявку РФ N 95114818/28, кл. B 63 B 35/00, публ. 20.08.97).
К недостаткам известного устройства относятся:
- высокое надводное расположение центра масс спусковой установки, ухудшающее остойчивость, мореходность и плавучесть судна;
- необходимость извлечения полупогружного аппарата из воды на уровень главной палубы, что увеличивает энергозатраты привода и не способствует увеличению водоизмещения экипажной рабочей кабины и превращению ее в грузопассажирский или производственный комплексы.
Известные другие устройства, подводные лодки, батискафы и подобные им устройства на малых глубинах материковых вод и в прибрежных зонах мелководного шельфа не могут быть использованы по соображениям безопасности и неэффективности.
Техническим результатом изобретения является создание судна, имеющего на борту спускаемый полупогружной аппарат с неограничиваемым водоизмещением рабочей кабины и энергосберегающим приводом погружения и всплытия.
Технический результат достигается тем, что в плавающем корпусе для производства подводно-технических работ, содержащем понтон, полупогружной аппарат, устройство для его спуска, источники электропитания и сжатого воздуха, швартовное и якорное устройства, весовое водоизмещение рабочей кабины полупогружного аппарата, равно массе полупогружного аппарата.
Кроме того, гибкий тяговый орган устройства для спуска полупогружного аппарата огибает не менее трех обводных звездочек, расположенных на осях стоек понтона, образуя одну или несколько горизонтальных ветвей с вмонтированными в них противовесами длиной, равной глубине погружения полупогружного аппарата, причем концы гибкого тягового органа закреплены на верхней и нижней оконечностях полупогружного аппарата, а одна из обводных звездочек является приводной.
Кроме того, масса вертикальной ветви гибкого тягового органа с вмонтированными в нее противовесами равна весовому водоизмещению пояса переменной ватерлинии полупогружного аппарата.
Кроме того, в рабочей кабине полупогружного аппарата выполнены балластные цистерны, заполняемые водой и опорожняемые сжатым воздухом и/или в полупогружном аппарате размещен балласт, и/или на участке с противовесами гибкого тягового органа установлены дополнительные грузы с возможностью их снятия для ликвидации случайных положительных или отрицательных отклонений от нулевой плавучести полупогружного аппарата.
Изобретение поясняется чертежами.
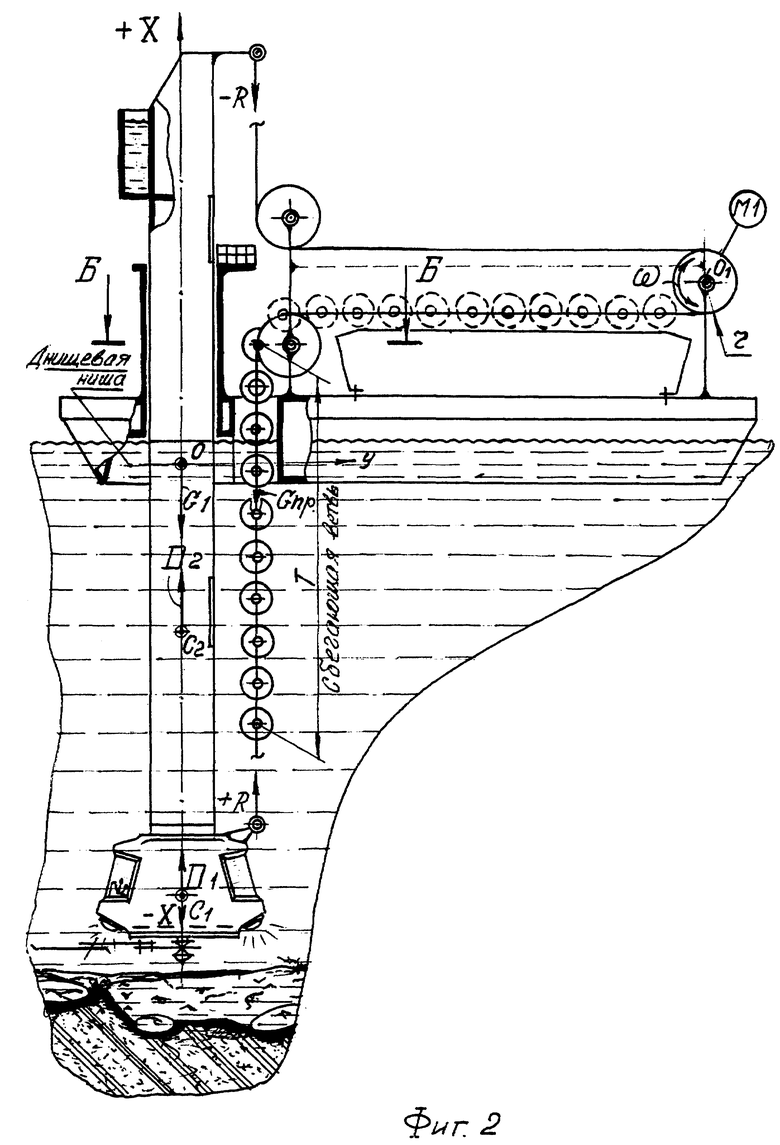
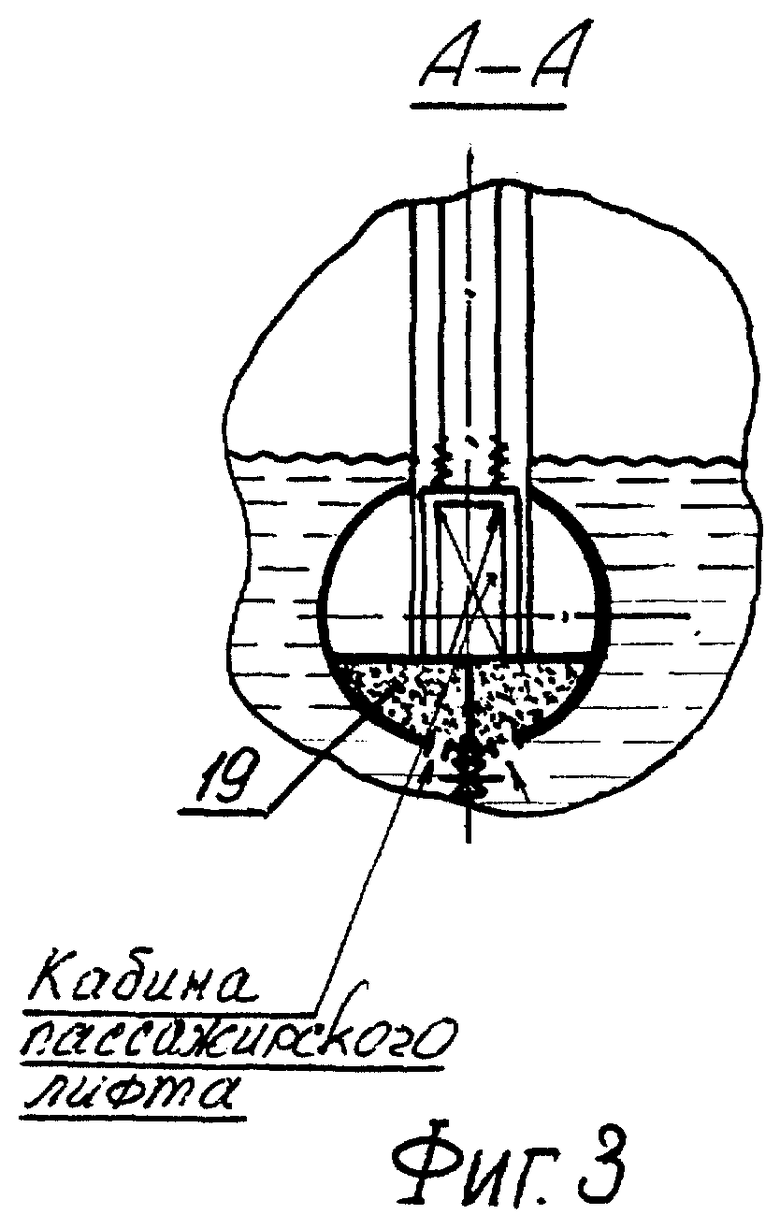
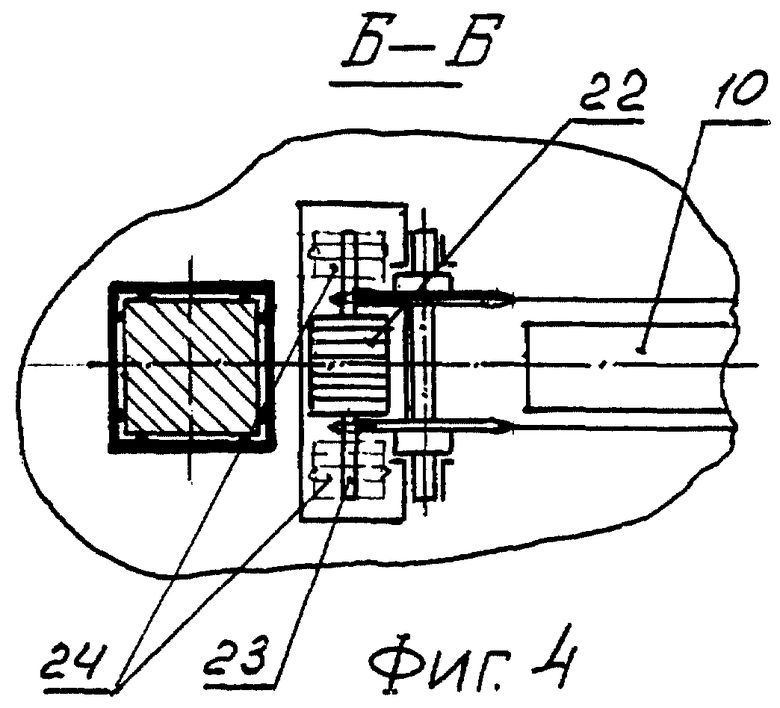
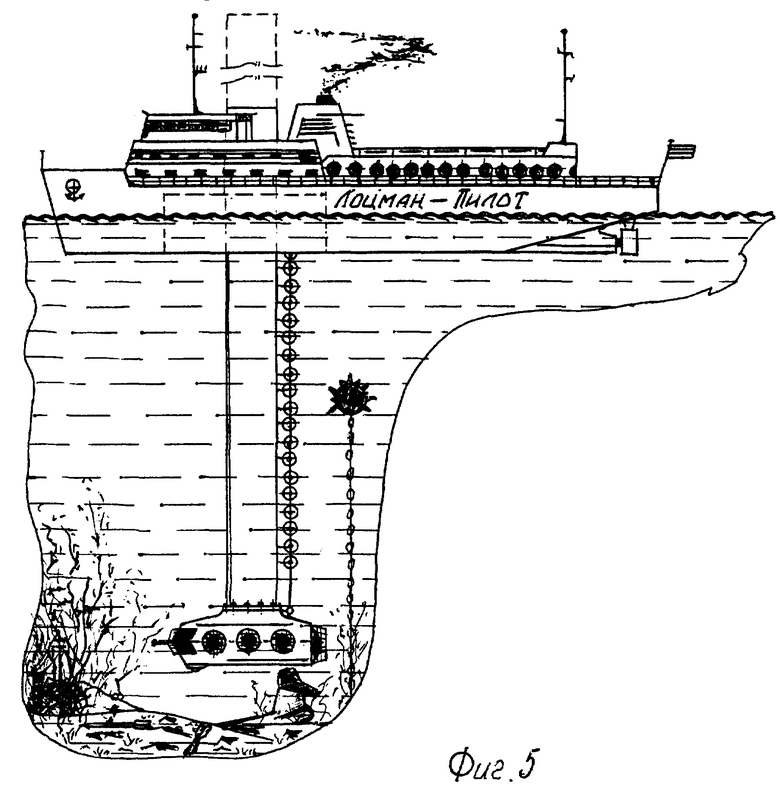
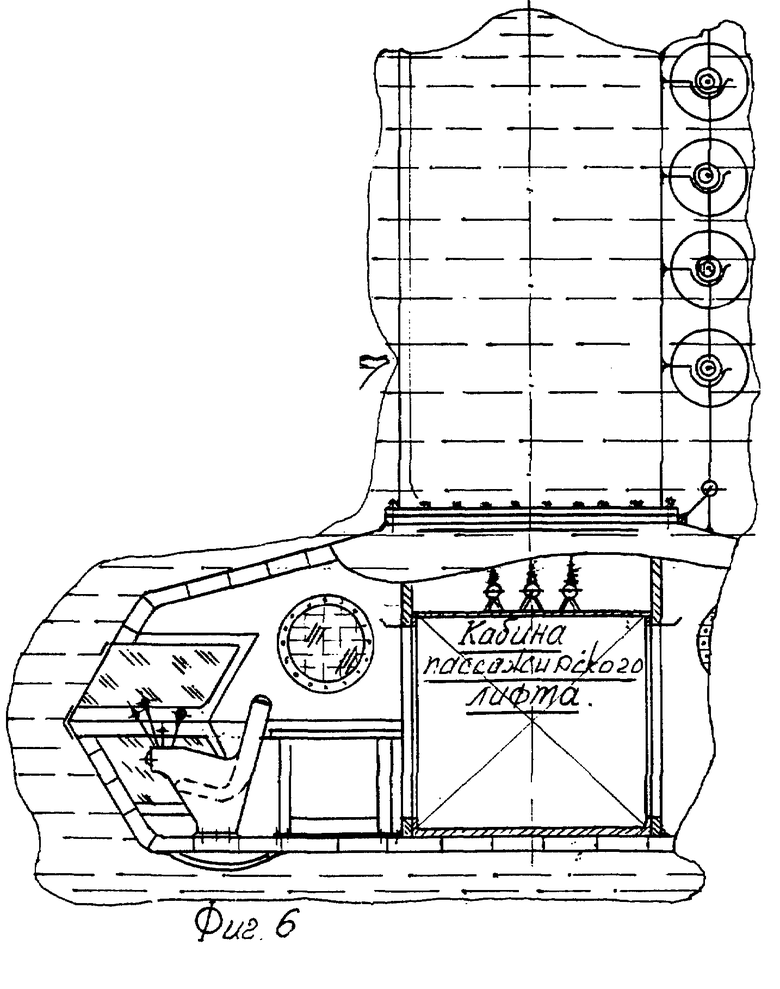
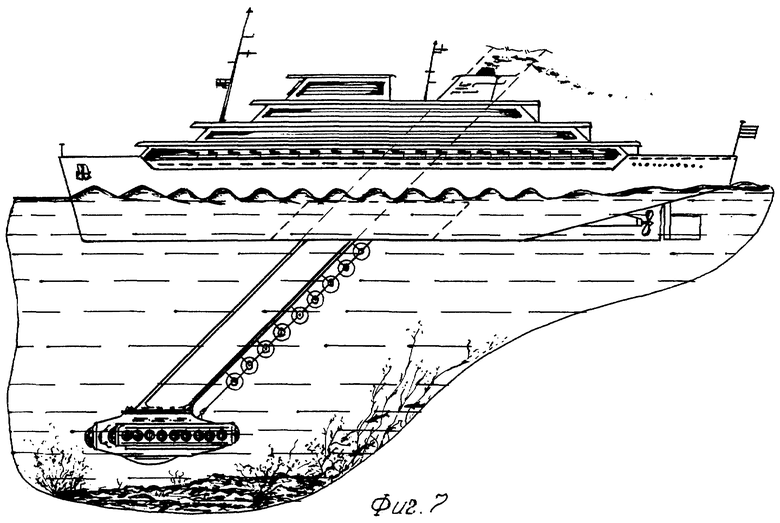
На фиг. 1 изображены плавающий корпус для производства подводно-технических работ, полупогружной подводный аппарат в верхнем положении и кинематическая схема его погружения и всплытия; на фиг. 2 - плавающий корпус и полупогружной подводный аппарат в крайнем нижнем положении с соответствующим положением звеньев кинематической цепи; на фиг. 3 - разрез А-А по мидельшпангоуту рабочей кабины подводного аппарата; на фиг. 4 - разрез Б-Б по шахтному стволу, обводной звездочке и противовесам; на фиг. 5 - патрульно-поисковый вариант плавающего корпуса; на фиг. 6 - разрез по диаметральной плоскости рабочей кабины полупогружного аппарата плавающего корпуса; на фиг. 7 - экскурсионно-туристический вариант плавающего корпуса.
Принятые на фиг. 1 и 2 сокращения и обозначения:
ГВЛ 1 - грузовая ватерлиния, соответствующая водоизмещению полупогружного аппарата;
ГВЛ 2 - грузовая ватерлиния, соответствующая осадке полупогружного аппарата;
T - осадка полупогружного аппарата, глубина его погружения или высота пояса переменной ватерлинии полупогружного аппарата, м;
D1 - сила поддержания рабочей кабины, т;
D2 - сила поддержания шахтного ствола, т;
G1 - масса полупогружного аппарата в полном грузу, т;
C1 и C2 - центры величины рабочей кабины и шахтного ствола;
R - усилие в одной из ветвей гибкого тягового органа;
O - точка пересечения прямоугольных координат; +X и +Y - оси координат;
V - направление движения соответствующего узла;
набегающая ветвь - горизонтальный участок гибкого тягового органа длиной T, равной глубине погружения полупогружного аппарата и занятый противовесами;
сбегающая ветвь - то же, но на вертикальном участке гибкого тягового органа;
W - угловая скорость приводной звездочки, рад/с;
M1 - механический привод погружения и подъема полупогружного аппарата;
Gпр - масса противовесов, расположенных на набегающей ветви гибкого тягового органа (включая и массу вертикально расположенных участков гибкого тягового органа), т.
Плавающий корпус для производства подводно-технических работ состоит из следующих основных узлов: понтона 1, полупогружного аппарата 2 и гибкого тягового органа 3.
Понтон 1 оборудован вертикальными направляющими 4, стойкими 5 и 6 с размещенными на них звездочками 7, 8 и 9, одна из которых приводная, и направляющими 10. В корпусе понтона 1 имеется сквозная прорезь для прохода гибкого тягового органа 3. Направляющая 4 несет на себе посадочную пассажирскую платформу 11.
Полупогружной аппарат 3 грузовой ватерлинии ГВЛ 2 делится на подводную и надводную части. В оголовке надводной части шахтного ствола 12 расположен кронштейн 13, в котором укреплен электрический динамометр 14, контролирующий усилие растяжения в закрепленной в нем верхней ветви гибкого тягового органа 3, емкость 15 и входная дверь 16. Другая дверь, но герметичная, расположена в подводной части шахтного ствола 12. К его торцу в нижней оконечности по линии ГВЛ 1 герметично примыкает рабочая кабина 17. Внутри она устроена так, что включает в себя помещение для экипажа, где установлены рычаги и приборы на пульте управления 18, помещения для пассажиров, лифтовую посадочную площадку, аварийную шахту и определенное количество балластных цистер 19.
На нижней оконечности полупогружного аппарата 2 установлен кронштейн 20, несущий на себе динамометр 21 с заделанным в нем нижним концом гибкого тягового органа 3, в качестве которого могут выступать приводные, тяговые и грузовые пластинчатые или круглозвенные цепи, а также металлические тросы либо их комбинации. Гибкий тяговый орган 3 запасован так, что он огибает три звездочки 7, 8 и 9, расположенные на двух стойках 6 и 5, образуя два горизонтальных либо наклонных участка, на одном из которых - нижнем - в определенной последовательности вмонтированы противовесы 22. Концы гибкого тягового органа 3 заделаны в динамометрах 14 и 21. Противовесы 22 располагаются на осях, смонтированных в цепи, и имеют выступающие концы 23, на которых могут закрепляться сменные противовесы 24. Весовая нагрузка от противовесов и цепей воспринимается направляющей 10. Одна из звездочек 7, 8 и 9 должна получать вращение от привода M1.
Работа в плавающем корпусе по достижению максимального энергосбережения на погружение и всплытие полупогружного аппарата построена на создании условий и устройств по непрерывному отслеживанию, оценке, корректированию и поддержанию на всех этапах вертикального перемещения полупогружного аппарата, включая и стартовую подготовку к погружению или всплытию, равенства между силами поддержания полупогружного аппарата и его массой. Осуществление этого требует соблюдения целого ряда требований:
1. Силы поддержания рабочей кабины на уровне грузовой ватерлинии ГВЛ 1 должны быть равны массе полупогружного аппарата.
2. На любой осадке шахтного ствола 12 его силы поддержания должны быть уравновешены определенным количеством противовесов на сбегающей ветви гибкого тягового органа 3, а их масса численно равна этой силе.
3. Применение противовесов 22 для уравновешивания шахтного ствола в пределах его пояса переменной ватерлинии (осадки T) должно сопровождаться следующими правилами:
3.1. Теоретическая длина участка набегающей ветви, занятая противовесами, должна быть равна осадке полупогружного аппарата.
3.2. Распределение масс противовесов 22 по районам внутри участка набегающей ветви должно быть прямо пропорционально водоизмещающим объемам соответствующих районов шахтного ствола 12, при погружении которого каждый из них участвует.
3.3. Масса каждого противовеса должна быть определена с учетом предшествующего пункта 3.2, а при погружении в воду - с учетом его собственного весового водоизмещения, как и с учетом водоизмещения гибкого тягового органа.
В ряде случаев, таких как:
- погружение и всплытие полупогружного аппарата порожним;
- его перегрузка пассажирами или грузами;
- выполнение разовых и пиковых г/п операций;
- обледенение шахтного ствола в зимний период и др. на погружение и всплытие может потребоваться многократно превосходящая мощность привода M1.
Для того чтобы ее не увеличивать, полупогружному аппарату достаточно придать нулевую или близкую к ней положительную или отрицательную плавучесть одним из нижеследующих способов:
- устройством в рабочей кабине полупогружного аппарата определенного количества балластных цистерн 19, заполняемых и опорожняемых забортной водой при помощи сжатого воздуха;
- размещением в шахтном стволе емкостей 15 для приема твердого, сыпучего или жидкого балласта, например, дизельного топлива;
- установкой (снятием) на цапфах выступающих концов 23 осей противовесов 22 гибкого тягового органа 3 дополнительных грузов 24.
Каждый из этих способов имеет свои особенности и может быть использован в зависимости от обстоятельств.
Так, балластные цистерны в рабочей кабине могут стать предварительными регуляторами сил поддержания полупогружного аппарата и одновременно выполнять роль резервного устройства на случай экстренного всплытия полупогружного аппарата (например, при выходе из строя энергетической установки или обрыве тягового органа).
Заправка емкости 15 в зимний период незамерзающим дизельным топливом с помощью насоса позволит с высокой точностью уравновешивать полупогружной аппарат. Объединение насоса и динамометров в единую электрическую управляемую систему полностью автоматизирует этот процесс.
Первые два способа могут быть использованы при достаточно редких "пиковых" нагрузках. Применение дополнительных грузов, устанавливаемых на противовесы гибкого тягового органа, целесообразно в случаях, когда перегрузки становятся постоянными.
Работа экипажа рабочей кабины по управлению погружением и всплытием полупогружного аппарата и системы управления состоит в следующем.
Контроль отклонений от нулевой плавучести и управление ее восстановлением осуществляет автоматизированная система управления. Основным ее элементом являются электрическая динамометры 14 и 21, контролирующие соответственно положительные и отрицательные отклонения от нулевой плавучести. При достижении массой полупогружного аппарата или силами поддержания значений, равных или превосходящих тяговые возможности привода M1 сигнал от динамометра 14 поступает либо на заполнение емкости 15 дизельным топливом, либо на заполнение балластных цистерн 19 забортной водой, а сигнал от тензометрического датчика 21 - на продувку балластных цистерн 19 сжатым воздухом либо на откачку дизельного топлива из емкости 15. И в том, и в другом случае возможно совмещение операции. Указанные процессы продолжаются до тех пор, пока масса полупогружного аппарата и силы его поддержания не станут одинаковыми, а показания обоих датчиков - нулевыми. По окончании операций на пульте управления 18 рабочей кабины 17 должны зажечься две зеленые лампочки, разрешающие экипажу погружение или всплытие. Участие экипажа в погружении/всплытии ограничивается управлением кнопками "Погружение", "Всплытие" и "Стоп". При нажатии первых двух кнопок электродвигатель привода M1 запускается в прямом либо обратном направлении. Движение от него передается на приводящую звездочку 7 и через гибкий тяговый орган 3 - полупогружному аппарату 3. Нажатием на кнопку "Стоп" обесточивается привод M1 и движение прекращается.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАВАЮЩАЯ УСТАНОВКА ДЛЯ ПРОИЗВОДСТВА ПОДВОДНО-ТЕХНИЧЕСКИХ РАБОТ | 1995 |
|
RU2115584C1 |
| ПОЛУПОГРУЖНАЯ МОРСКАЯ ПЛАТФОРМА ПОВЫШЕННОЙ ВОЛНОСТОЙКОСТИ | 2001 |
|
RU2191132C1 |
| ВОЛНОСТОЙКАЯ МОРСКАЯ ГРУЗОПОДЪЁМНАЯ ПЛАТФОРМА (ВМГП) | 2014 |
|
RU2561491C1 |
| ПОЛУПОГРУЖНОЕ ЛЕДОКОЛЬНО-ТРАНСПОРТНОЕ СУДНО | 2011 |
|
RU2443596C1 |
| ВОЛНОСТОЙКИЙ САМОХОДНЫЙ КАТАМАРАННЫЙ КОМПЛЕКС | 2008 |
|
RU2398705C2 |
| МОРСКАЯ ТЕХНОЛОГИЧЕСКАЯ ЛЕДОСТОЙКАЯ ПЛАТФОРМА | 2012 |
|
RU2522628C1 |
| Плавучая полупогружная установка | 1980 |
|
SU960062A1 |
| УСТРОЙСТВО ДЛЯ ОБСЛУЖИВАНИЯ И РЕМОНТА ПОДВОДНО-КАБЕЛЬНЫХ МАГИСТРАЛЕЙ СВЯЗИ | 2006 |
|
RU2389638C2 |
| МОРСКАЯ ПЛАВУЧАЯ ПЛАТФОРМА | 2014 |
|
RU2556408C1 |
| МОРСКАЯ ТЕХНОЛОГИЧЕСКАЯ ЛЕДОСТОЙКАЯ ПЛАТФОРМА | 2015 |
|
RU2603340C1 |
Изобретение относится к судостроению, в частности к конструкции плавающего корпуса для производства технических работ. Плавающий корпус содержит понтон, полупогружной аппарат, устройство для его спуска, источники электропитания и сжатого воздуха. Весовое водоизмещение рабочей кабины полупогружного аппарата равно массе полупогружного аппарата. Устройство для спуска полупогружного аппарата включает в себя тяговый орган, который огибает не менее трех обводных звездочек. Звездочки расположены на осях стоек понтона. Тяговый орган образует одну или несколько горизонтальных ветвей с вмонтированными в них противовесами длиной, равной глубине погружения полупогружного аппарата. Концы гибкого тягового органа закреплены на верхней и нижней оконечностях полупогружного аппарата. Одна из обводных звездочек является приводной. Достигается создание судна, имеющего на борту полупогружной аппарат с неограниченным водоизмещением рабочей кабины и энергосберегающим приводом погружения и всплытия. 3 з.п.ф-лы, 7 ил.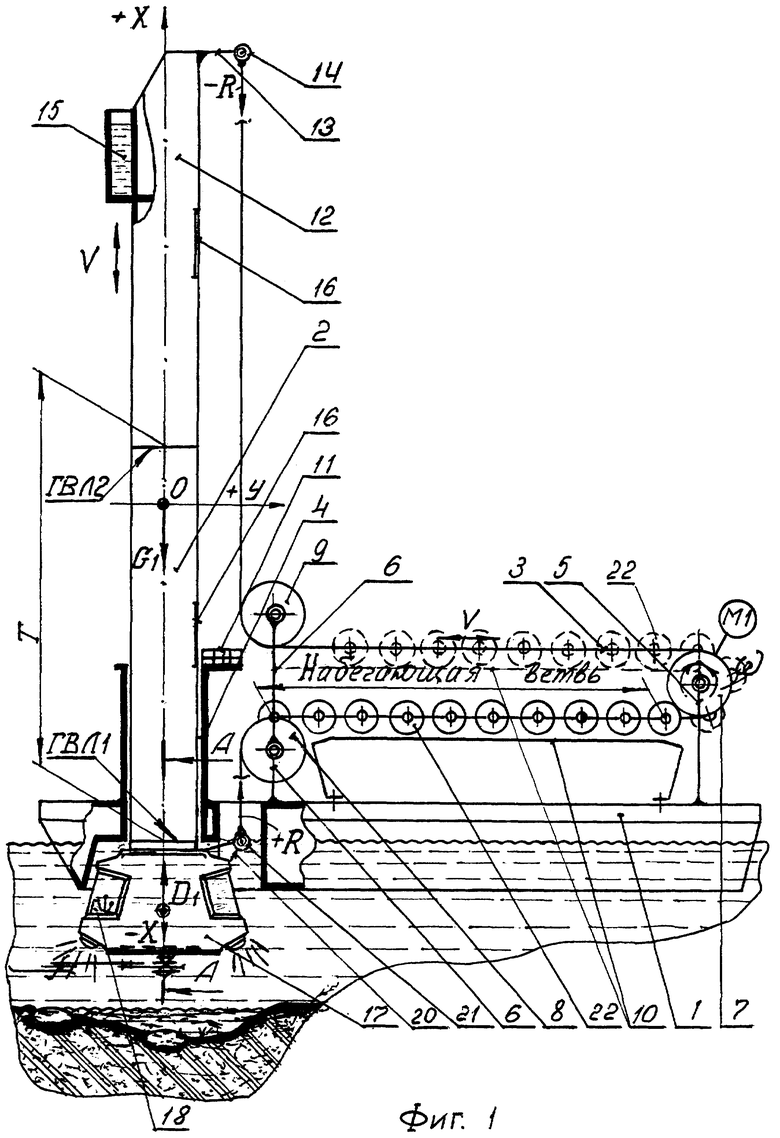
| RU заявка 95114818, 20.08.97 | |||
| US 3996870 A, 14.12.76. |
