Изобретение относится к средствам обеспечения подводно-технических работ (ПТР), а также подъема на борт затонувших объектов значительных масс и габаритов в условиях волнения и течения.
Как показывает многолетний опыт проведения подводно-технических и судоподъемных работ, плавучее средство их обеспечения должно с высокой точностью позиционировать над местом работ, не качаться на волнении и обладать необходимой плавучестью и остойчивостью при спуске и подъеме с грунта на борт различных объектов (грузов), в том числе с большими массогабаритными характеристиками.
Отсутствие волностойкости у килекторного судна КИЛ-164 привело к неудачному завершению попытки подъема камеры спасательной всплывающей (КСВ) АПЛ «Комсомолец» в 1993 г. Подъем КСВ производился с глубины 1850 м с помощью штатных технических средств килектора и носил длительный (более трех суток) характер под воздействием развивающегося морского волнения. На завершающем этапе подъема, когда до поверхности оставалось 190 м, динамические рывки, вызванные сильной продольной качкой судна в совокупности с возросшей жесткостью грузового каната (вследствие сокращения его длины по мере приближения поднимаемой КСВ к поверхности), превысили разрывную прочность грузового каната, что привело к его разрыву и обратному затоплению КСВ.
Из этого следует, что обеспечение волностойкости является обязательным условием создания морских грузоподъемных платформ, предназначенных для выполнения подводно-технических и судоподъемных работ. Еще одним определяющим успех условием функционирования таких платформ является обеспечение их плавучести и остойчивости при подъеме со дна тяжелых грузов. Грузоподъемные лебедки размещаются, как правило, на верхних палубах, где достаточно места для их удобного обслуживания и трассировки грузовых канатов, а также отсутствует заливание при наличии сильного морского волнения. В соответствии с законами механики точка приложения поднимаемого груза будет находиться там же, на верхней палубе. Поэтому при подъеме тяжелого груза центр масс всей морской грузоподъемной платформы может существенно повыситься, а ее осадка увеличиться. В результате, возникают проблемы с остойчивостью и плавучестью платформы.
Известно, что при создании морских грузоподъемных платформ достаточно выгодными являются архитектурные формы катамаранного типа, близкие к патенту РФ №2191132, 2001 г. «Полупогружная морская платформа повышенной волностойкости», показанные на фиг. (а, б) аналог.
Такая платформа имеет два положения: надводное крейсерское и рабочее, полупогруженное на глубину полувысоты колон. Особенность ее архитектуры в том, что в крейсерском положении при расстоянии между понтонами, близком полудлине расчетной волны, платформа почти не имеет бортовой качки, а в рабочем, полупогруженном положении - бортовой и вертикальной качки. Проявляется закон противофазности двух главных составляющих возмущающих сил - квазистатических 

Наиболее близким к предлагаемому техническому решению является архитектурная форма по патенту №2398705, 2008 г. «Волностойкий самоходный катамаранный комплекс» (фиг. 2) - прототип.
Этот волностойкий катамаранный комплекс (ВСКК) имеет форму понтонов в поперечном сечении в виде овала, вытянутого вверх с отношением высоты к ширине, примерно, 1,2 и с цилиндрической вставкой посередине. Такая форма понтонов обеспечивает этой платформе две волностойкие ватерлинии, одну - в притомленном надводном положении и вторую - в полупогруженном, основном рабочем положении. Потребуется только определить размеры ВМГП исходя из заданных полезных грузов, массы и габаритов поднимаемых грузов и разработать рекомендаций по проведению грузоподъемных работ, обеспечивающих сохранение его достаточной плавучести и остойчивости при их проведении. Описание патента РФ №2191132 содержит методику определения элементов понтонов, колонн и расстояния между ними, обеспечивающих стойкость к волнению заданной балльности при обеспечении необходимого запаса плавучести и остойчивости.
Однако колонны ВСКК между понтонами и верхней платформой могут быть усовершенствованы. Исходя из положений теории волностойкости и проведенных в Военно-морском политехническом институте модельных экспериментов для уменьшения квазистатических возмущающих сил 
Цель изобретения - расширение возможностей известного технического решения. Она достигаются тем, что предлагаемая волностойкая морская грузоподъемная платформа (ВМГП), включающая два водонепроницаемых понтона овальной формы, вытянутой вверх с отношением высоты к ширине Hп,/Bп, ≈1,2 с цилиндрической вставкой посередине, внутри понтонов размещаются энергетическая установка, движительно-рулевой комплекс с винто-рулевыми колонками, управляющимися системой динамического позиционирования для точного удержания ВМГП над местом подводно-технических работ (ПТР), запасы топлива, вспомогательные механизмы, балластные цистерны с системами их заполнения и продувания, при этом понтоны соединены прочными горизонтальными связями балками-распорками крыльевого типа, над понтонами располагаются вертикальные колонны с горизонтальными дисками, выполняющими роль нейтрализаторов волновых сил в рабочем полупогруженном состоянии ВМГП, а на колонны опирается верхняя рабочая палуба, предлагаемая ВМГП дополнена грузоподъемным устройством с двухзвенной схемой спуска и подъема, состоящей из основной грузовой лебедки, главных гиней с подвижным и неподвижным блоками, соединенными размыкающимися дистанционно фиксирующими механизмами, четырех лебедок для спуска опорной рамы, направляющих блоков опорной рамы, являющейся местом закрепления неподвижного блока главного полиспаста и подвешенной на четырех вспомогательных полиспастах, которые закреплены на палубной эстакаде, причем опорная рама способна фиксироваться в верхнем и нижнем положениях особыми фиксаторами, перемещаясь в промежуточных положениях на роликах по направляющим стойкам через вырез в рабочей палубе, закрываемый с помощью приводов люковых закрытий, служащих в конечном итоге опорной поверхностью для поднимаемых объектов, при этом общая высота колонн принимается около 1,2 расчетной высоты волны, а широкая часть колон должна располагаться посередине, а вверх и вниз профиль колонн должен сужаться для уменьшения квазистатической части возмущающей силы при прохождении волны, а ее водоизмещение, запас плавучести, остойчивость и волностойкость рассчитываются известными методами для заданной балльности волнения для нормальной нагрузки с включением в нее грузоподъемного комплекса, для случая подъема с глубин указанных в задании на проектирование массы и габаритов затонувших объектов под опорную площадку и после подъема их на рабочую палубу. ВМГП в исходном состоянии при стоянке в базе без груза показана на фиг. 3.
Предлагаемая ВМГП имеет две волностойкие ватерлинии, каждая из которых реализуется на различном по силе волнении и в зависимости этапа работ по подъему груза.
Надводное волностойкое положение ВМГП возникает после затопления концевых групп ЦГБ, обеспечивая достаточный запас плавучести и остойчивости. Оно аналогично позиционному положению подводных лодок. Оно показано на фиг. 4. Это положение может использоваться на этапе перехода к месту выполнения подводно-технических работ (ПТР) и обратно в пункт базирования, а также при проведении грузоподъемных операций при относительно небольшом волнении.
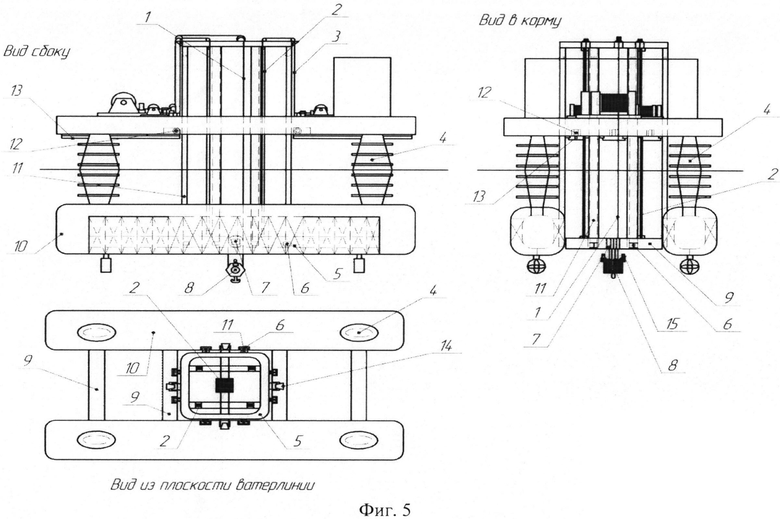
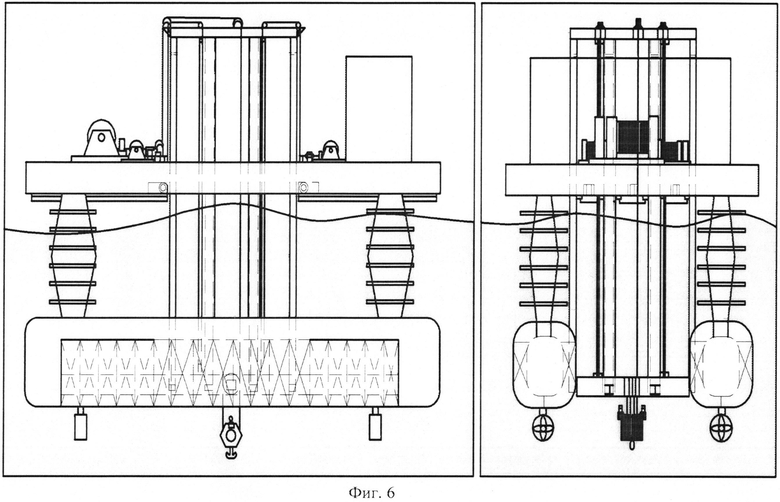
Основное волностойкое полупогруженное положение показано на фиг. 5. В это положение ВМГП переходит, заполняя дополнительно среднюю группу ЦГБ. Для этого объем ЦГБ средней группы должен быть равным запасу плавучести ВМГП в первом волностойком положении с учетом объема колонн, погруженных по основное ее волностойкое положение. Основное волностойкое полупогруженное положение будет применяться непосредственно при спуске грузонесущей связи, остропке и подъеме объекта в условиях сильного волнения. Статическое равновесие ВМГП будет обеспечиваться плавучестью колонн, а остойчивость, главным образом, переносными моментами инерции их площадей. На фиг. 6 показана опорная рама 5, зафиксированная фиксаторами 14 в нижнем положении между двумя балками-распорками 9. Фиксирующие механизмы главного полиспаста 15 разомкнуты, что позволяет подвижному блоку с гаком 8 опускаться вниз при разматывании грузонесущей связи основной лебедки 1. Волностойкость обеспечивается профилированными колоннами с нейтрализаторами 4 и всей архитектурной формой ВМГП.
Порядок применения ВМГП показан на фиг. 4-8. Он включает:
1. Переход к месту производства ПТР, судоподъемных или других работ. Он осуществляется буксировкой или своим ходом на небольшие расстояния в нормальном состоянии (фиг. 3) при отсутствии волнения или в волностойком надводном положении (фиг. 4) при сравнительно небольшом волнении. При этом опорная рама зафиксирована в верхнем положении, блоки главного полиспаста соединены между собой фиксирующими механизмами. Балластные цистерны пусты или заполнены их концевые группы для перевода ВМГП в волностойкое надводное положение. При этом несколько увеличивается осадка ВМГП и, в силу овального сечения корпусов, качка платформы на этом морском волнении существенно уменьшается. Вырез в верхней палубе закрыт люковыми закрытиями.
2. Определение места ПТР и позиционирование над ним с помощью винторулевых колонок.
3. Переход в волностойкое положение (фиг. 3 или 4) в зависимости от интенсивности волнения нулем частичного или полного затопления цистерн главного балласта.
4. Спуск с помощью полиспастов 2 опорной рамы 5 на балку-распорку 9. Опорная рама снимается со стопоров и через вырез в рабочей палубе при раздвинутых закрытиях опускается вниз синхронной работой четырех малых полиспастов. Плавный, без рывков и раскачивания спуск опорной рамы обеспечивается за счет волностойкости ВМГП, а также за счет наличия направляющих стоек и отсутствия раскачивания подвижного блока главного полиспаста, закрепленного фиксирующими механизмами. В нижнем положении опорная рама фиксируется, фиксирующие механизмы главного полиспаста дистанционно размыкаются.
5. Спуск грузоподъемного гака и остропка поднимаемого груза. Ее выполняют известными способами, в том числе возможно применение рабочего телеуправляемого подводного необитаемого аппарата, размещенного непосредственно на самой ВМГП в качестве вспомогательного оборудования. При сравнительно небольшой глубине места возможен также спуск водолазов.
6. Отрыв поднимаемого груза от грунта производится путем периодического осушения и заполнения ЦГБ средней группы, что будет вызывать периодическое натяжение и ослабление грузонесущей связи. Эта вертикальная раскачка в конечном итоге приведет к отрыву груза от грунта.
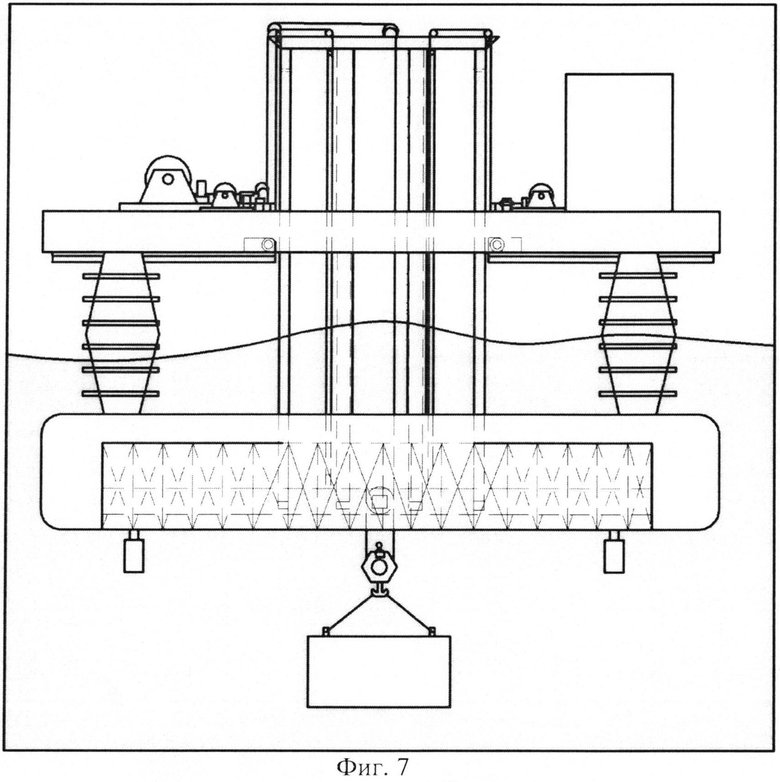
7. Подъем груза с грунта. Подъем объекта с грунта производится главным полиспастом с одновременной откачкой балласта из балластных цистерн для сохранения волностойкой осадки ВМГП (фиг. 6) и недопущения сокращения его запаса плавучести. Остойчивость ВМГП при уменьшенной площади действующей ватерлинии в рабочем положении обеспечивается низким расположением неподвижного блока главного полиспаста, к которому приложен вес поднимаемого груза. Подъем объекта под днище ВМГП показан на фиг. 7. В таком положении в силу волностойкости ВМГП можно безопасно ждать уменьшения волнения, либо осуществлять медленный переход ВМГП в закрытый от волн район для завершения работ по подъему объекта на борт ВМГП.
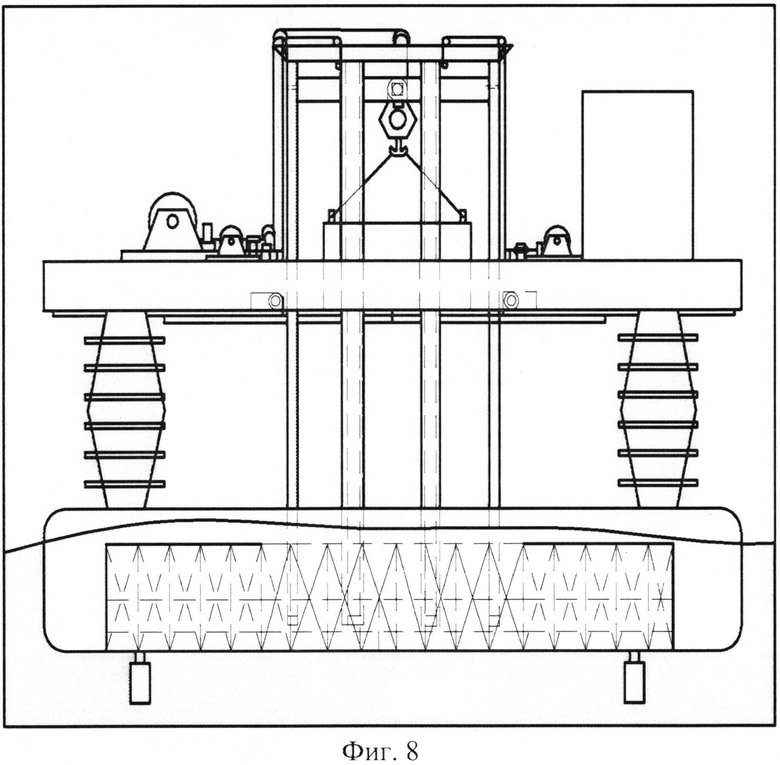
8. Перевод ВМГП в первое надводное волностойкое положение фиг. 5 с грузом, который остается в положении, показанном на фиг. 8. Эту операцию можно провести при тихой погоде или незначительном волнении быстрым продуванием ЦГБ, чтобы быстрее пройти опасный горизонт уменьшения остойчивости при уменьшении площади сечения колонн.
9. Подъем груза на рабочую палубу для транспортировки в базу. Этот подъем осуществляется из предыдущего положения путем постепенного продувания ЦГБ концевых групп и подъема груза полиспастами на рабочую платформу. Эта операция должна быть предварительно просчитана, чтобы на всех этапах подъема груза, при котором повышается центр масс ВМГП и соответственно увеличивалась бы площадь ватерлинии понтонов и рос момент остойчивости формы, компенсирующий увеличение момента остойчивости масс. Финал этого подъема показан на фиг. 8.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВОЛНОСТОЙКИЙ САМОХОДНЫЙ КАТАМАРАННЫЙ КОМПЛЕКС | 2008 |
|
RU2398705C2 |
| Стационарная волностойкая платформа аэрозольного противодействия (АЭП) | 2021 |
|
RU2785477C1 |
| ПОЛУПОГРУЖНАЯ МОРСКАЯ ПЛАТФОРМА ПОВЫШЕННОЙ ВОЛНОСТОЙКОСТИ | 2001 |
|
RU2191132C1 |
| ПОЛУПОГРУЖНОЙ МНОГОЦЕЛЕВОЙ МОРСКОЙ КОМПЛЕКС | 2021 |
|
RU2757512C1 |
| МОРСКАЯ ТЕХНОЛОГИЧЕСКАЯ ЛЕДОСТОЙКАЯ ПЛАТФОРМА | 2012 |
|
RU2522628C1 |
| УСТРОЙСТВО ДЛЯ СПУСКА И ПОДЪЕМА АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2024 |
|
RU2827914C1 |
| БОЛЬШОЙ МОРСКОЙ БУЙ ЗАДАННОЙ ВОЛНОСТОЙКОСТИ И ОСТОЙЧИВОСТИ | 2006 |
|
RU2309081C1 |
| ПЛАВУЧЕЕ СРЕДСТВО ДЛЯ ВЫПОЛНЕНИЯ ПОДЪЕМНО-ТРАНСПОРТНЫХ ОПЕРАЦИЙ | 2011 |
|
RU2459739C1 |
| СУДОПОДЪЕМНЫЙ ПОНТОН | 2006 |
|
RU2330777C2 |
| СПОСОБ БИООЧИСТКИ ВОД ОТ ТЕХНОГЕННЫХ РАДИОНУКЛИДОВ | 2002 |
|
RU2255906C2 |
Изобретение относится к средствам обеспечения подводно-технических работ (ПТР), а также подъема на борт затонувших объектов значительных масс и габаритов в условиях волнения и течения. Предложена волностойкая морская грузоподъемная платформа (ВМГП), которая благодаря понтонам овальной вытянутой вверх формы обладает волностойкостью в надводном положении против волн ограниченной интенсивности при частичном заполнении балластных цистерн и повышенной волностойкостью при полном затоплении всех балластных цистерн и погружении колонн на величину около 1,2 расчетной амплитуды волны. У ВМГП повышена волностойкость в этом положении за счет усовершенствования формы колонн. Для проведения грузоподъемных операций ВМГП снабжена грузоподъемным устройством с двухзвенной схемой спуска и подъема грузов, разработана методика управления им, позволяющая обеспечить необходимый запас плавучести и остойчивости при подъеме и транспортировке грузов. Технический результат заключается в расширении функциональных возможностей волностойкой морской платформы. 2 з.п. ф-лы, 8 ил.
1. Волностойкая морская грузоподъемная платформа (ВМГП), включающая два водонепроницаемых понтона овальной формы, вытянутой вверх с отношением высоты к ширине Hп/Bп≈1,2 с цилиндрической вставкой посередине, внутри понтонов размещаются энергетическая установка, движительно-рулевой комплекс с винто-рулевыми колонками за пределами понтонов, управляющимися системой динамического позиционирования для точного удержания ВМГП над местом подводно-технических работ (ПТР), запасы топлива, вспомогательные механизмы, балластные цистерны с системами их заполнения и продувания, при этом понтоны соединены прочными горизонтальными связями - балками-распорками крыльевого типа, над понтонами располагаются вертикальные колонны с горизонтальными дисками, выполняющими роль нейтрализаторов волновых возмущающих сил в рабочем полупогруженном состоянии ВМГП, на колонны опирается верхняя рабочая палуба, отличающаяся тем, что она снабжена грузоподъемным устройством с двухзвенной схемой спуска и подъема грузов, состоящей из основной грузовой лебедки, главных гиней с подвижным и неподвижным блоками, соединенными размыкающимися и дистанционно фиксирующими механизмами, четырех лебедок для спуска опорной рамы, направляющих блоков, опорной рамы, являющейся местом закрепления неподвижного блока главного полиспаста и подвешенной на четырех вспомогательных полиспастах, которые закреплены на палубной эстакаде, причем опорная рама способна фиксироваться в верхнем и нижнем положениях фиксаторами, перемещаясь в промежуточных положениях на роликах по направляющим стойкам через вырез в рабочей палубе, закрываемый с помощью приводов люковыми закрытиями, служащими в конечном итоге опорной поверхностью для поднимаемых объектов.
2. Волностойкая морская грузоподъемная платформа по п. 1, отличающаяся тем, что форма колонн - составные пирамиды с овальной формой сечения с отношением длины к ширине 1,2-1,3, соединенные на уровне рабочей волностойкой ватерлинии большими основаниями, а сечения к верхнему и нижнему основаниям пирамид плавно уменьшаются на 15-20%.
3. Волностойкая морская грузоподъемная платформа по п. 1, отличающаяся тем, что ее водоизмещение, запас плавучести, остойчивость и волностойкость рассчитываются известными методами для заданной балльности волнения для:
- нормальной нагрузки с включением в нее грузоподъемного комплекса,
- волностойкого положения после затопления ЦГБ концевых групп без груза,
- для случая подъема с глубин указанных в задании на проектирование массы и габаритов затонувших объектов под опорную площадку,
- после подъема их на рабочую палубу.
| ВОЛНОСТОЙКИЙ САМОХОДНЫЙ КАТАМАРАННЫЙ КОМПЛЕКС | 2008 |
|
RU2398705C2 |
| ПОЛУПОГРУЖНАЯ МОРСКАЯ ПЛАТФОРМА ПОВЫШЕННОЙ ВОЛНОСТОЙКОСТИ | 2001 |
|
RU2191132C1 |
| МОРСКОЕ ГРУЗОВОЕ СУДНО ДЛЯ ПОДЪЕМА, ПОГРУЗКИ-ВЫГРУЗКИ И ТРАНСПОРТИРОВКИ ЗАТОНУВШИХ ОБЪЕКТОВ В ПУНКТ ПРИЕМА | 2008 |
|
RU2377155C1 |
| US 4112864 A, 12.09.1978 | |||
| US 4909174 A, 20.03.1990 | |||
| DE 20308850 U1, 28.08.2003 | |||

