Предлагаемое изобретение относится к области транспортной технике и может быть использовано для обслуживания, ремонта и профилактики подводных кабельных магистралей связи.
Половина всего эксплуатационного времени подводных аппаратов затрачивается на обслуживание морских нефтепроводов, пятая часть - на осмотр и укладку в траншеи подводных трубопроводов и кабелей, десятая часть уходит на подводные и аварийно-спасательные работы. Остальное время - биологические и геологические исследования, сбор кораллов и контроль за загрязнением океанов [A.H.Дмитриев. Проектирование подводных аппаратов. Л., Судостроение 1978].
Известны различные типы подводных устройств, так, например, подводный аппарат, описанный в книге Морская энциклопедия. Л.: Судостроение, 1986, с.102. ПА-обитаемое или необитаемое инженерное сооружение для проведения подводных наблюдений и работ в автономном плавании или в сопровождении судна-носителя. Автономные ПА имеют полный комплект систем и устройств, обеспечивают самостоятельное подводное плавание. Скорость ПА 6-12 км/ч. ПА имеет телевизионные камеры, горизонтальный движитель, вертикальный движитель, прочный корпус, баластную цистерну, маршевый движитель, баллоны воздуха высокого давления, аккумуляторные батареи, манипуляторы и др. элементы.
Автономные обитаемые ПА могут использоваться в толще воды и на дне в научных исследовательских и др. целях.
Прототипом заявляемого устройства является подводный обитаемый аппарат "Пайсис" [А.А.Каганович, Е.М.Хайзерук. Суда для прокладки подводных кабелей связи. Л.: Судостроение, 1988, с.1507].
Устройство состоит из рамы, на которой смонтированы сферическая кабина, кормовая сферическая балластная цистерна, две носовые сферические балластные системы и блок питания и управления.
Спускаемый подводный автономный аппарат "Пайсис" имеет рабочую глубину погружения 2000 м, развивает скорость до 2-х узлов, продолжительность погружения при новых аккумуляторных батареях не более 5-6 часов. Подводный аппарат спускают с судна носителя для осмотра, профилактики, ремонта и заглубления подводных магистралей связи, а также для проведения научных изысканий на дне морей и океанов.
Недостатком как аналога, так и прототипа является малая автономность устройства, из-за недостаточной энергоемкости аккумуляторных батарей которых хватает всего на 5-6 часов работы, а это, в свою очередь, ведет к остановкам устройства во время проводимых работ для подзарядки аккумуляторных батарей, в результате чего снижается производительность работы устройства.
Целью настоящего изобретения является увеличение автономности плавания спускаемого подводного аппарата.
Поставленная цель достигается тем, что устройство для обслуживания и ремонта подводных кабельных магистралей связи, содержащее спускаемый подводный автономный аппарат с аккумуляторными источниками энергии и электродвигателем, снабжено плавающим волновым источником электроэнергии, с кабель-тросом и блоком амортизации его подергивания, соединенным с этим кабель-тросом, при этом упомянутый источник электроэнергии подключен впараллель к аккумуляторному источнику энергии и электродвигателю, причем блок амортизации подергивания кабель-троса представляет собой спиральную пружину растяжения и участок кабель-троса, образующий петлю, параллельно которому прикреплена спиральная пружина растяжения, а плавающий волновой источник электроэнергии представляет собой заякореваемый преобразователь энергии морских волн в электрическую энергию, при этом заякореваемый преобразователь энергии морских волн в электрическую энергию снабжен водяным якорем, установленным на кабель-тросе между блоком амортизации его подергивания и преобразователем энергии морских волн в электроэнергию, а водяной якорь представляет собой плоский круг с растяжками, с помощью которого этот плоский круг закреплен к преобразователю энергии морских волн в электроэнергию на глубине неподвижной воды, при этом устройство снабжено движителем с электроприводом и блоком управления направлением движения по кабель-тросу, при этом упомянутый движитель размещен на плавающем волновом источнике электроэнергии.
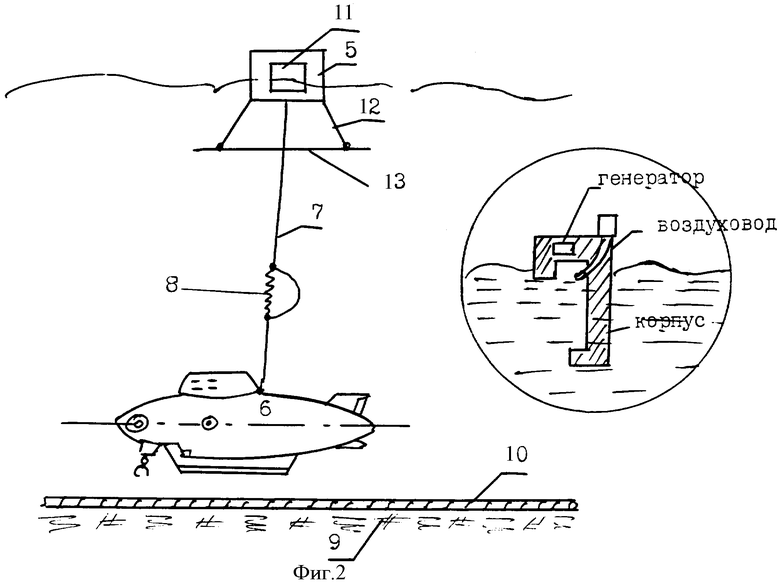
На фиг.1 показана схема устройства с использованием свободно плавающего волнового источника энергии.
На фиг.2 показана схема устройства с использованием заякоренного преобразователя энергии морских волн.
Свободно плавающий волновой источник электроэнергии состоит из трех плотов 1, шарниров 2 между плотами 1, гидравлических насосов 3, гидравлического мотора 4, соединенного механически с генератором электроэнергии 5 и установленного на одном из плотов 1.
От генератора 5 электроэнергия поступает на двигатель и аккумуляторные батареи подводного аппарата 6 по кабель-тросу 7, на котором установлен демпфер 8 для стабилизации подводного аппарата 6. Кабель-трос 7 закреплен на подводном аппарате 6 через катушку слабины. Эта катушка не показана, она служит для регулирования глубины погружения подводного аппарата. На дне водоема 9 показана подводно-кабельная магистраль связи 10.
Работа предлагаемого устройства заключается в следующем.
Плот 1 представляет шарнирную цепочку из трех понтонов. Тройка шарнирно связанных понтонов при движении ПА 6 свободно движется по поверхности водоема, и следует профилю волны. Когда передний понтон, подобно поплавку, свободно перемещается вверх и вниз, второй качается со сдвигом фазы, а третий остается относительно неподвижным.
Поворачиваясь в шарнирах 2, понтоны 1 толкают вперед и назад рычаги и двигают поршни гидравлических насосов 3, которые, перекачивая жидкость, приводят в действие гидравлический мотор 4. Мотор 4 вращает генератор 5, вырабатывающий электрическую энергию, которая по кабель-тросу 7 поступает на аккумулятор и двигатель ПА 6.
На понтоне 1 может быть установлен и движитель с электроприводом и блоками управления направлением движения по кабель-тросу 7 (не показано).
Устройство с использованием заякоренного преобразователя энергии морских волн по схеме (фиг.2) также обеспечивает питание ПА 6 электроэнергией. В этом случае используется воздушная турбина 11, генератор электроэнергии 5, растяжки водяного якоря 12 и водяной якорь 13 типа перевернутого бака - плоскостного круга с отверстиями наверху и с воздушной прослойкой над ватерлинией. Поднимаясь или падая, волна соответственно выталкивает или всасывает воздух внутрь емкости через отверстия. Колебания столба воздуха приводят в движение турбину 11, соединенную с генератором электроэнергии 5, который вырабатывает электроэнергию и подает ее по кабель-тросу 7, который снабжен демпфером 8 - стабилизирующим устройством, на аккумулятор и двигатель ПА 6.
Технико-экономическая эффективность.
Развитие международной торговли и другие обстоятельства побуждают постоянно совершенствовать межконтинентальную связь. Только через Атлантику уже проложено более 15 подводно-кабельных магистралей связи, последняя на сотни тысяч телефонных каналов. Вполне понятно, что для таких многоканальных систем совершенно недопустимо простой связи из-за повреждения кабеля, он слишком дорого обходится. Между тем вероятность повреждения его с ростом числа подводно-кабельных магистралей связи возрастает главным образом из-за интенсификации освоения человеком мирового океана. Для осмотра, профилактики, заглубления подводного кабеля в грунт морского дна и ремонта ПКМС в настоящее время используют обитаемые подводные аппараты (см. Морской сборник №121981 г. "Защита подводных кабельных линий связи").
Работы по обследованию морского дна и по заглублению ПКМС достаточно трудоемкие и требуют много времени.
Современные же обитаемые ПА обладают малой автономностью, так как аккумуляторные батареи их рассчитаны в пределах 5-6 часов работы (в зависимости от вида работ), после чего им необходима, как известно, перезарядка 7-8 часов.
Предложенное устройство обеспечивает работу подводного аппарата практически на неограниченное время, т.е. получен новый эффект - непрерывность процесса, так как двигатель ПА 6 постоянно получает электроэнергию от волнового источника электроэнергии и одновременно в параллель происходит подзарядка аккумуляторных батарей ПА 6.
Предложенное устройство может быть использовано и для проведения научных изысканий на акватории морей и океанов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система энергообеспечения подводного аппарата | 2020 |
|
RU2750396C1 |
| УСТРОЙСТВО ДЛЯ РЕМОНТА ПОДВОДНЫХ КАБЕЛЬНЫХ МАГИСТРАЛЕЙ СВЯЗИ | 2007 |
|
RU2336196C1 |
| Мобильная распределённая система подводного наблюдения | 2021 |
|
RU2767384C1 |
| УСТРОЙТВО ДЛЯ ЭНЕРГООБЕСПЕЧЕНИЯ ПОДВОДНОГО ЭНЕРГОАККУМУЛИРУЮЩЕГО ОБЪЕКТА | 2021 |
|
RU2775329C1 |
| Модульный необитаемый подводный аппарат "Океаника-КИТ" | 2020 |
|
RU2738281C1 |
| ПОДВОДНОЕ СУДНО ДЛЯ ОБСЛУЖИВАНИЯ ПОДВОДНЫХ ДОБЫЧНЫХ КОМПЛЕКСОВ НА АРКТИЧЕСКОМ ШЕЛЬФЕ И ДРУГИХ ПОДВОДНО-ТЕХНИЧЕСКИХ РАБОТ | 2016 |
|
RU2629625C1 |
| Система наблюдения за надводной и подводной обстановкой | 2022 |
|
RU2787578C1 |
| ПЛАВУЧАЯ ФЕРМА ДЛЯ РАЗВЕДЕНИЯ ГИДРОБИОНТОВ | 2009 |
|
RU2410873C1 |
| Способ пространственной ориентации системы нелетального воздействия | 2022 |
|
RU2801544C1 |
| Коллективное спасательное средство для использования в ледовых условиях | 2023 |
|
RU2808496C1 |
Изобретение может быть использовано для обслуживания, ремонта и профилактики подводных кабельных магистралей связи, а также для проведения научных изысканий на акватории морей и океанов. Устройство содержит спускаемый подводный автономный аппарат с аккумуляторными источниками энергии и электродвигателем. Подводный аппарат соединен кабель-тросом с плавающим волновым источником электроэнергии через блок амортизации, содержащий спиральную пружину растяжения и участок кабель-троса, образующий петлю. Волновой источник электроэнергии подключен параллельно к аккумуляторным источникам и электродвигателю и представляет собой заякореваемый преобразователь энергии морских волн, снабженный водяным якорем, состоящим из плоского круга с растяжками. Достигается увеличение автономности плавания подводного аппарата. 2 ил.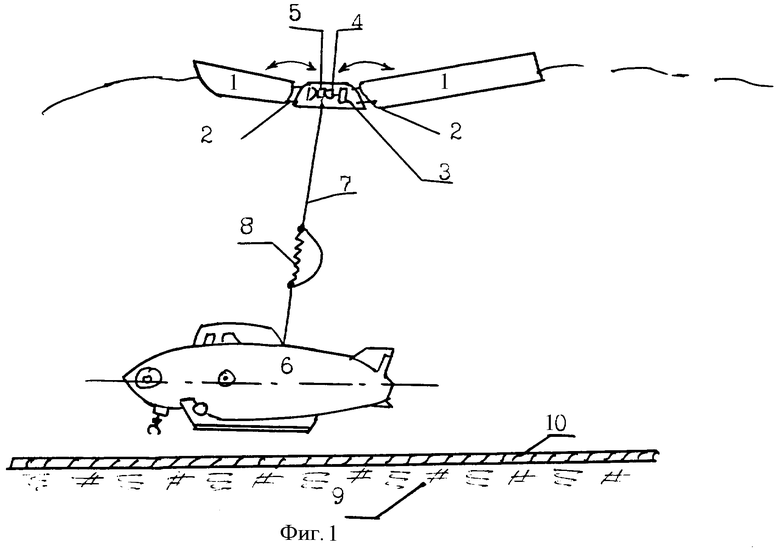
Устройство для обслуживания и ремонта подводно-кабельных магистралей связи, содержащее спускаемый подводный автономный аппарат с аккумуляторными источниками энергии и электродвигателем, отличающееся тем, что устройство снабжено плавающим волновым источником электроэнергии с кабель-тросом и блоком амортизации его подергивания, соединенным с этим кабель-тросом, при этом упомянутый источник электрической энергии подключен параллельно к аккумуляторному источнику энергии и электродвигателю, причем блок амортизации подергивания кабель-троса представляет собой спиральную пружину растяжения и участок кабель-троса, образующий петлю, параллельно которому прикреплена спиральная пружина растяжения, а плавающий волновой источник электроэнергии представляет собой заякореваемый преобразователь энергии морских волн в электрическую энергию, при этом заякореваемый преобразователь энергии морских волн в электрическую энергию снабжен водяным якорем, установленным на кабель-тросе между блоком амортизации его подергивания и преобразователем энергии морских волн в электроэнергию, а водяной якорь представляет собой плоский круг с растяжками, с помощью которого этот плоский круг закреплен к преобразователю энергии морских волн в электроэнергию на глубине неподвижной воды, при этом устройство снабжено движителем с электроприводом и блоком управления направлением движения по кабель-тросу, причем упомянутый движитель размещен на плавающем волновом источнике электроэнергии.
| Катанович А.А., Хайзерук Е.М | |||
| Суда для прокладки подводных кабелей связи | |||
| - Л.: Судостроение, 1988, с.150 | |||
| ВОЛНОДВИЖИТЕЛЬНАЯ МАШИНА | 2000 |
|
RU2196071C2 |
| Волновая насосная установка для использования энергии волн | 1933 |
|
SU41470A1 |
| US 3872819 А, 25.03.1975 | |||
| СПОСОБ ПЕРЕРАБОТКИ ТВЕРДЫХ БЫТОВЫХ ОТХОДОВ | 1992 |
|
RU2045708C1 |

