Область техники, к которой относится изобретение
Комбинированная лопасть несущего винта летательного аппарата и способ полета летательного аппарата относятся к летательным аппаратам с несущим винтом, обеспечивающих вертикальный взлет, зависание и посадку, и длительный высокоскоростной горизонтальный полет в сочетании с хорошей маневренностью.
Уровень техники.
Известен летательный аппарат с Х-образным крылом-ротором, представляющий собой винтокрылый аппарат с останавливаемым несущим винтом. Для обеспечения полета с одним и тем же винтом-крылом и в самолетном и в вертолетном режимах несущая система снабжена системой выдувания потока с передней и задней кромок лопастей. Причем ротор имеет симметричный относительно центральной вертикальной оси профиль с созданием подъемной силы за счет выдувания воздуха через щель над задней кромкой. Внутри лопасти имеется канал для подачи воздуха от компрессора к соплам на передних и задних кромках лопастей ротора. Лопасть данной конструкции не позволяет использовать набегающий на лопасть поток воздуха для подачи в воздушно-реактивный двигатель и для рекуперации тепла отходящих газов [1] с. 187-188 Рис.6.32.
Известен комбинированный вертолет, имеющий вертолетный винт, крыло и толкающий воздушный винт, который приводится в движение обычным поршневым двигателем. Воздух высокого давления, поступающий от компрессора двигателя, направляется к небольшим реактивным соплам, установленным на законцовках ротора. Для осуществления скоростного горизонтального полета подача воздуха в реактивные сопла отключается, и ротор устанавливается в режим авторотации. Недостатком этого винта является необходимость использования различных двигателей для вертикального и высокоскоростного горизонтального полета, ухудшение аэродинамических характеристик на высоких скоростях полета [2] с.210 Рис.11.1.
Известен вертолет с реактивным несущим винтом, у которого на концах лопастей установлены воздушно-реактивные двигатели с подачей топлива через втулку винта. Так как для запуска воздушно-реактивного двигателя требуется большая скорость набегающего потока, то такой винт требует предварительной раскрутки от другого источника энергии до включения основного двигателя. Такой винт обеспечивает простоту конструкции, но из-за низкого КПД двигателей имеет большой удельный расход топлива. Из-за размещения двигателя на концах лопастей невозможно применять рекуперацию тепла, ухудшаются аэродинамические характеристики несущего винта, увеличивается механическая нагрузка на лопасти [2] с.211 Рис. 11.2.
Известна также лопасть летательного аппарата, которая оснащена газотурбинным реактивным двигателем. Упомянутый газотурбинный реактивный двигатель вмонтирован в лопасть на некотором удалении от оси вращения ротора. Причем входное устройство размещено на передней кромке лопасти, а выходное сопло - на задней кромке той же лопасти. В канале между упомянутыми входным устройством и выходным устройством газотурбинный двигатель размещен таким образом, что ось вращения турбины и компрессора расположена вдоль продольной оси лопасти. Воздушный поток, поступающий через воздухозаборник на передней кромке лопасти, поступает в воздушно-реактивный двигатель в направлении к периферии (концевой части) лопасти. В этой конструкции нагрузка на лопасть увеличена из-за размещения на концевой части лопасти реактивного двигателя вместе с турбиной, компрессором, топливной системой, системой охлаждения и др. Такая конструкция не позволяет осуществлять полет с использованием двигателей, размещенных в лопасти при неподвижном несущем роторе. Увеличенная масса концевой части лопасти приводит к увеличению деформаций лопасти при передаче крутящего момента от ее корневой части для вращения и изменения углов атаки лопасти [3] (Изобретение по заявке ФРГ N 1456071, 1968, В 64 С 27/18).
Во всех прототипах на высокой скорости горизонтального полета лопасти создают сильное лобовое сопротивление, лопасти в любом режиме полета не могут совмещать функции несущего ротора и теплообменника воздушно-реактивного двигателя. Ни один из прототипов не обеспечивает непосредственное управление боковой силой.
Сущность изобретения
Известные ранее конструкции лопасти несущего винта летательного аппарата с воздухозаборником на передней кромке и задним выходным соплом, соединенным с воздушно-реактивным двигателем, предлагается оснастить осевым соплом, расположенным на торце лопасти осевым соплом, расположенным на торце лопасти и направленным вдоль оси лопасти, каналом для соединения воздушно-реактивного двигателя с упомянутым задним выходным соплом и с упомянутым осевым соплом, газораспределительным устройством, расположенным между упомянутыми каналами, предназначенными для соединения с указанным воздушно- реактивным двигателем, который размещен на оси вращения винта. Предлагаемое изменение в конструкции лопасти несущего винта и способ полета летательного аппарата направлены на решение следующих задач:
создание несущей лопасти, совмещающей функции несущего ротора и противоточного рекуперативного теплообменника с большой поверхностью теплообмена для предварительного подогрева сжатого воздуха, поступающего в камеру сгорания, при минимальном местном гидравлическом сопротивлении воздушному потоку;
использование несущей лопасти в летательных аппаратах, способных обеспечивать вертикальные взлет и посадку, и длительный высокоскоростной горизонтальный полет как с подвижным, так и с неподвижным ротором;
применение газотурбинного двигателя с переменным рабочим циклом, на разных скоростях горизонтального полета (от компрессорного к бескомпрессорному газотурбинному воздушно-реактивному двигателю);
снижение массовой характеристики летательного аппарата;
повышение КПД двигателя в широком диапазоне режимов полета;
непосредственное управление подъемной и боковой силами в горизонтальном полете;
использование ресурсов двигателя с высоким КПД как для горизонтального, так и для вертикального полета.
Перечень фигур чертежей
Фиг. 1 - Общий вид летательного аппарата с комбинированной лопастью на 1 листе формата А4;
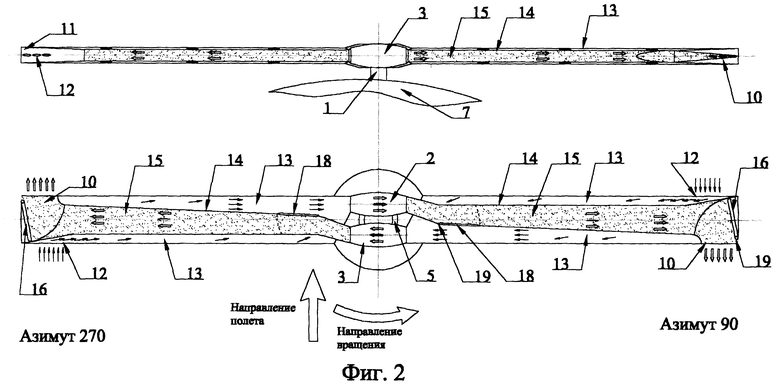
Фиг. 2 - Схема лопасти и газораспределения в азимуте 90 и 270 градусов на 1 листе формата А4;
Фиг. 3 - Схема газораспределения в лопастях в азимуте 45 и 255 градусов на 1 листе формата А4;
Фиг. 4 - Схема газораспределения в лопастях в азимуте 0 и 180 градусов на 1 листе формата А4;
Фиг. 5 - Схема газораспределения в лопастях в азимуте 45 и 255 градусов на 1 листе формата А4;
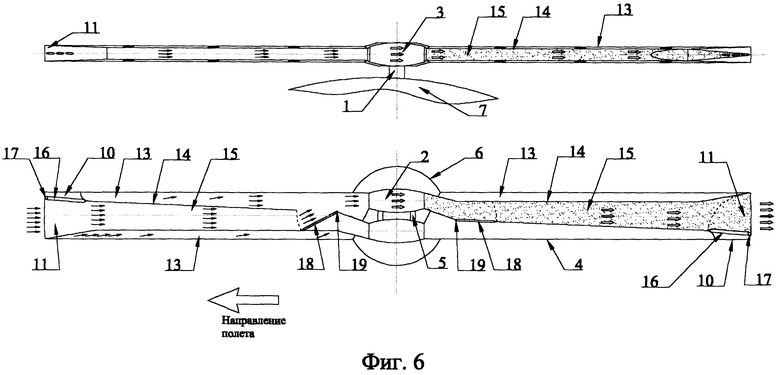
Фиг. 6 - Схема газораспределения в лопастях при неподвижном роторе с лопастями, расположенными по направлению полета на 1 листе формата А4.
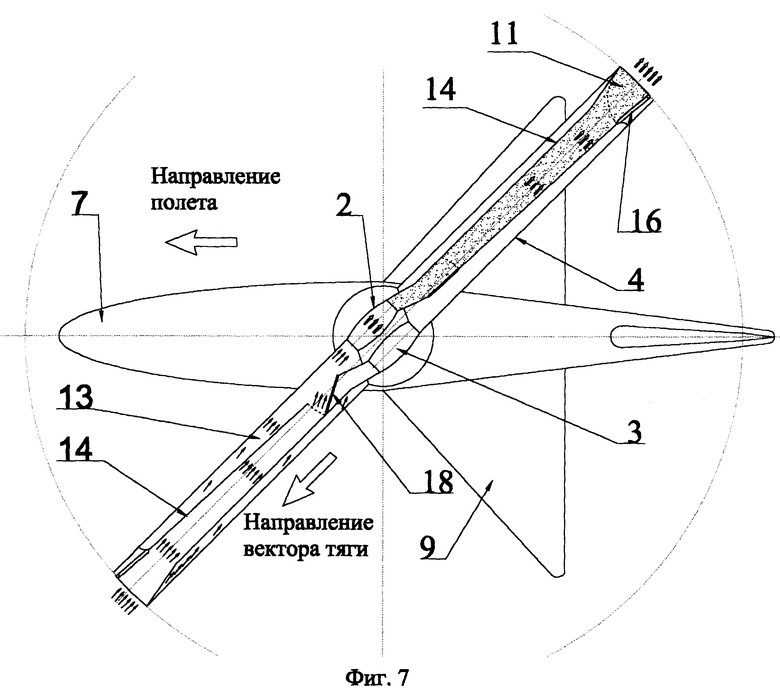
Фиг. 7 - Схема изменения вектора тяги относительно продольной оси летательного аппарата при неподвижном роторе на 1 листе формата А4.
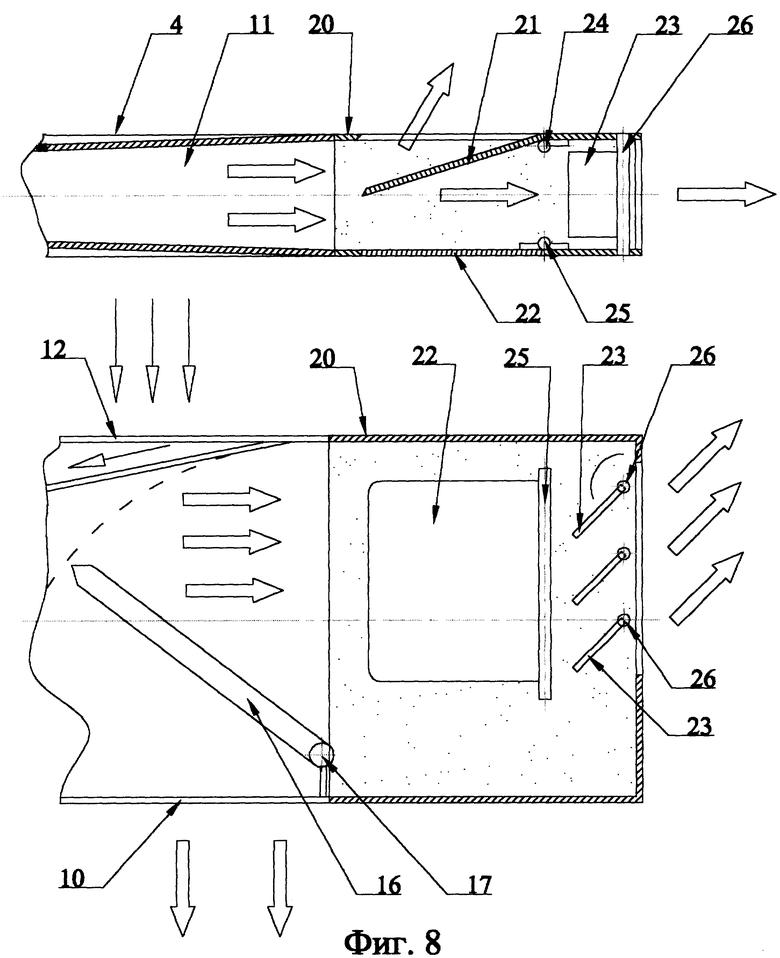
Фиг. 8 - Схема изменения направления истечения горячих газов относительно продольной оси на 1 листе формата А4.
Сведения, подтверждающие возможность осуществления изобретения
Несущий ротор летательного аппарата выполнен, например, в виде полого двухлопастного винта. На оси 1 ротора летательного аппарата размещены два (по числу лопастей ротора) воздушно- реактивных двигателя 2 и 3 с противоположным направлением входа холодного воздуха и истечения горячего газа. Подача топлива к двигателям 2 и 3 осуществляется через ось 1 ротора, а циклическое изменение углов установки лопастей 4 - через втулку 5 несущего винта. Для уменьшения аэродинамического сопротивления двигатели 2 и 3 вместе с втулкой 5 несущего винта закрыты обтекателем 6. Фюзеляж 7 летательного аппарата выполнен с плавными обводами, снижающими лобовое сопротивление на крейсерских и максимальных скоростях. Шасси 8 выполнено убирающимся. Для создания подъемной силы при больших скоростях полета летательный аппарат имеет крылья 9 (Фиг. 1). На задних кромках концевых частей лопастей 4 размещены реактивные задние сопла 10, обеспечивающие истечение струй газов в направлении, перпендикулярном продольной оси лопасти 4 (Фиг. 2). На торце каждой лопасти 4 встроено осевое сопло 11, ось которого параллельна продольной оси лопасти 4, и обеспечивающее истечение струй горячих газов в направлении, параллельном продольной оси лопасти 4. На передних кромках концевых частей лопастей 4 размещены воздухозаборники 12, обеспечивающие отбор воздуха с передней кромки лопасти 4 для последующей подачи его к камере сгорания двигателей 2 или 3. Для разделения потоков горячего и холодного воздуха во внутренней полости 13 лопасти 4 размещена удлинительная труба 14, внутренняя полость 15 которой соединяет реактивные задние сопла 10 и осевое сопло 11 с выходными устройствами воздушно-реактивных двигателей 2 или 3. Удлинительная труба 14 выполнена из теплопроводного материала и размещена во внутренней полости 13 лопасти 4 таким образом, чтобы обеспечить наилучшее охлаждение встречным потоком воздуха, поступающим в лопасть через воздухозаборники 12 к двигателям 2 или 3. Для распределения потока горячего воздуха между задними соплами 10 и осевым соплом 11 в полости 15 удлинительной трубы 14 размещена створка 16 газораспределителя с возможностью поворота вокруг оси 17 по командам системы управления (на схеме не показана). Форма створки 16 внешнего распределителя выполнена такой, что в двух крайних положениях обеспечивает направление всего потока горячего воздуха, движущегося от камеры сгорания двигателя 2 или 3, либо к задним соплам 10, либо к осевому соплу 11. Для соединения полостей 13 и 15 в режиме горизонтального полета с неподвижным ротором, в удлинительной трубе 14 выполнена створка 18 клапана с возможностью поворота вокруг оси 19 по командам системы управления. Форма створки 18 клапана выполнена такой, что обеспечивает герметичное разделение внутренней полости 13 лопасти 4 и полости 15 удлинительной трубы 14 в одном положении и их соединение в другом крайнем положении.
Для регулирования направления истечения горячих газов из осевого сопла 11 относительно продольной лопасти комбинированная лопасть 4 летательного аппарата может оснащаться насадкой 20, размещенной на концевой части лопасти 4. Насадка 20 соединяется с осевым соплом 11. В насадке 20, имеющей внешний профиль, соответствующий профилю лопасти 4, имеются верхние отклоняющие створки 21, нижние отклоняющие створки 22 и осевые отклоняющие створки 23 (Фиг. 8). Верхние отклоняющие створки 21 могут поворачиваться вокруг верхней оси 24 и предназначены для отклонения струи горячих газов (прошедших через осевое сопло 11) вверх относительно плоскости вращения лопасти 4. Нижние отклоняющие створки 22 могут поворачиваться вокруг нижней оси 25 и предназначены для отклонения струи горячих газов вверх относительно плоскости вращения лопасти 4. Осевые отклоняющие створки 23 могут поворачиваться вокруг вертикальных осей 26 и предназначены для отклонения струи горячих газов относительно продольной оси лопасти 4 в плоскости ее вращения. Управление отклоняющими створками 21, 22 и 23 осуществляется системой автоматического управления в зависимости от требуемых условий работы лопасти. В исходном положении верхние 21 нижние 22 отклоняющие створки закрыты, а осевые отклоняющие заслонки 23 установлены параллельно продольной оси лопасти 4, обеспечивая истечение горячих газов из осевого сопла 11 только параллельно продольной оси лопасти 4.
Для вертикального взлета створки 16 газораспределителей в удлинительных трубах 14 лопастей 4 устанавливают в положение, при котором полость 15 удлинительной трубы соединена с задними соплами 10 на концевых частях лопастей 4. Створка 18 клапана устанавливается в положение, при котором полость 15 удлинительной трубы 14 изолируется от полостей 13 лопасти 4 для холодного воздуха. Затем производится запуск двигателей. Холодный воздух через воздухозаборники 12 на концевых частях лопастей 4 по внутренней полости 13 поступает к камерам сгорания двигателя 2 и 3, а горячие газы, выходящие из камер сгорания, по удлинительной трубе 14 к задним соплам 10. Благодаря противотоку холодного и горячего воздуха по изолированным друг от друга полостям 13 и 15 происходит рекуперативный теплообмен через стенки удлинительной трубы 14. Таким образом, холодный воздух подогревается перед поступлением в камеру сгорания, увеличивается его давление. Большая длина лопастей 4 и отсутствие поворотов потока воздуха обеспечивает эффективный теплообмен с небольшими гидравлическими потерями.
При работающих воздушно-реактивных двигателях 2 и 3 крутящий момент создается в результате всасывания воздуха через воздухозаборники 12 на передних кромках и истечения горячих газов из реактивных задних сопел 10 на задних кромках лопасти 4 ротора, т.е. за счет перепада давлений воздуха на передней и задней кромках лопасти 4. Вращающийся ротор в любом азимутальном положении лопастей 4 создает подъемную силу для вертикального взлета, зависания и посадки. Скорость вращения ротора регулируется количеством горячего газа, поступающего от двигателей 2 и 3.
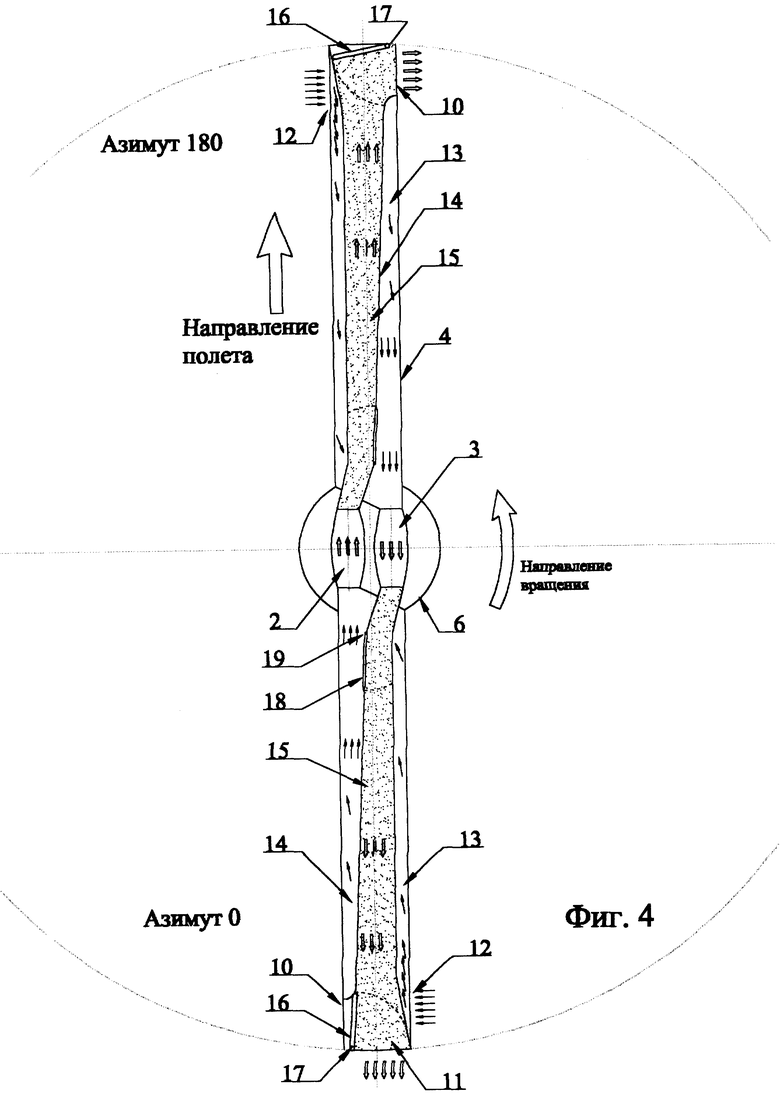
Для горизонтального полета с использованием реактивной составляющей горячих газов система автоматического управления осуществляет регулирование количества горючей смеси в воздушно-реактивных двигателях 2 и 3, количества горячего газа, истекающего через задние 10 и осевые сопла 11 в зависимости от азимутального положения лопасти 4, горизонтальной скорости полета и других условий. Для уменьшения лобового сопротивления при горизонтальном полете шасси 8 убирается в фюзеляж 7 после набора заданной высоты и скорости полета. Затем при вращении ротора, например, против часовой стрелки системой автоматического управления осуществляется регулировка газораспределения в зависимости от азимутального положения лопасти 4. Так в лопасти 4, находящейся в азимутальном положении 0 градусов (Фиг. 4), створка 16 находится в положении, при котором горячие газы вытекают только через осевое сопло 11, создавая реактивную тягу в направлении полета, а заднее сопло 10 закрыто. В противоположной лопасти 4, находящейся в азимутальном положении 180 градусов, створка 16 находится в положении, при котором горячие газы вытекают только через заднее сопло 10, создавая крутящий момент, а осевое сопло 11 закрыто. Таким образом в данном положении к ротору приложены крутящий момент для вращения лопасти и реактивное усилие в направлении полета, передаваемое через ось 1 фюзеляжу 7 для движения летательного аппарата в плоскости вращения ротора.
Воздух, поступающий в воздухозаборник 12 на передней кромке вращающейся лопасти 4 во всех ее азимутальных положениях, проходит по внутренней полости 13, обеспечивая охлаждение удлинительной трубы 14, и одновременно подогревается перед поступлением в камеры сгорания воздушно-реактивных двигателей 2 и 3. Подогрев воздуха перед поступлением в камеру сгорания улучшает условия горения и повышает КПД двигателей 2 и 3.
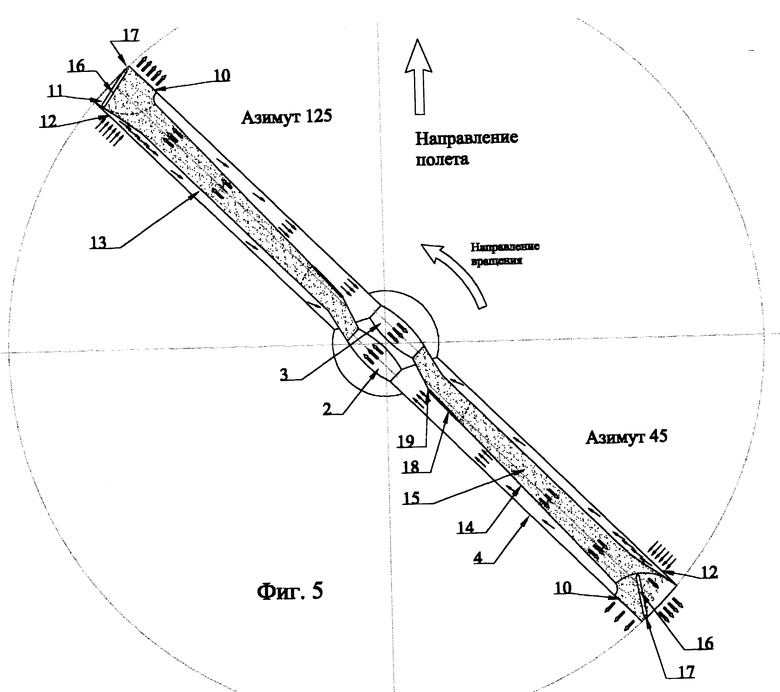
При повороте лопасти 4 из азимутального положения 0 градусов до азимутального положения 90 градусов система автоматического управления осуществляет поворот створки 16 вокруг оси 17 от положения, при котором все горячие газы вытекают через осевое сопло 11, создавая реактивную тягу вдоль лопасти, до положения (в азимуте 90 градусов), при котором все горячие газы вытекают через заднее сопло 10, создавая крутящий момент. В результате уменьшения количества горячего газа, вытекающего из осевого сопла 11, реактивная тяга вдоль данной лопасти 4 будет уменьшаться, а крутящий момент будет увеличиваться за счет увеличения количества горячего газа, вытекающего через заднее сопло 10. Реактивная тяга вдоль данной лопасти 4 передается через ось 1 фюзеляжу 7 и способствует горизонтальному перемещению летательного аппарата вперед.
При повороте лопасти 4 из азимутального положения 90 градусов до азимутального положения 270 градусов система автоматического управления сохраняет положение створки 16, при котором все горячие газы вытекают через заднее сопло 10, а осевое сопло 11 закрыто. Таким образом в азимуте от 90 до 270 градусов горячие газы, вытекающие через заднее сопло 10, создают только крутящий момент. В результате реактивная тяга вдоль данной лопасти 4 в азимуте от 90 до 270 градусов будет отсутствовать, а крутящий момент будет способствовать вращению ротора и его величина будет зависеть от количества горячего газа, поступающего от воздушно- реактивного двигателя 2 к заднему соплу 10.
При повороте лопасти 4 из азимутального положения 270 градусов до азимутального положения 0 градусов система автоматического управления осуществляет поворот створки 16 вокруг оси 17 от положения, при котором все горячие газы вытекают через заднее сопло 10, создавая крутящий момент, до положения (в азимуте 0 градусов), при котором все горячие газы вытекают через осевое сопло 11. В результате уменьшения количества горячего газа, вытекающего из заднего сопла 10, крутящий момент, приложенный к данной лопасти, 4 будет уменьшаться, а реактивная тяга вдоль лопасти 4 будет увеличиваться за счет увеличения количества горячего газа, вытекающего через осевое сопло 11. Реактивная тяга вдоль данной лопасти 4 передается через ось 1 фюзеляжу 7 и способствует горизонтальному перемещению летательного аппарата вперед.
Таким образом при непрерывном вращении лопасти горячие газы воздушно-реактивных двигателей 2 и 3 не только создают крутящий момент на несущем роторе летательного аппарата, но и создают реактивное усилие в направлении продольной оси фюзеляжа 7. Максимальная величина реактивной тяги совпадает с направлением продольной оси фюзеляжа 7. Так как вектор реактивной тяги, передаваемой лопастями 4 на фюзеляж 7, постоянно меняет свою величину и направление в азимуте от 90 до 270 градусов, то рыскание летательного аппарата по курсу может предотвращаться системой автоматического управления, например соответствующим поворотом вертикальных стабилизаторов летательного аппарата (на схеме не показаны). Направление максимального вектора реактивной тяги от лопастей 4 относительно продольной оси фюзеляжа может изменяться путем изменения момента времени открытия и закрытия створок 16 газораспределительного механизма лопасти 4. Для поворота максимального вектора реактивной тяги от продольной оси летательного аппарата против часовой стрелки во время полета с вращающимся ротором система автоматического управления осуществляет вышеописанные повороты створки 16 вокруг оси 17 с опережением по фазе на требуемый угол. А для поворота максимального вектора реактивной тяги от продольной оси летательного аппарата по часовой стрелке во время полета с вращающимся ротором система автоматического управления осуществляет вышеописанные повороты створки 16 вокруг оси 17 с отставанием по фазе на тот же угол. Так как угол запаздывания может устанавливаться в пределах от 0 до 360 градусов, то регулирование направления вектора тяги относительно продольной оси летательного аппарата может обеспечиваться в тех же пределах. На изменение угла запаздывания требуется время, сопоставимое со временем одного полного оборота лопасти, следовательно, изменение направления вектора реактивной тяги может осуществляться за такое же короткое время. Указанные диапазон и время регулирования направления и величины вектора реактивной тяги обеспечивают повышение маневренности летательного аппарата, т.к. реактивная тяга не зависит от переходных процессов, связанных с перестройкой воздушного потока возле винта при энергичном маневрировании.
По мере увеличения скорости горизонтального полета подъемная сила, создаваемая крыльями 9, увеличивается, поэтому от ротора летательного аппарата требуется увеличивать усилие, приложенное к фюзеляжу, в направлении полета, а подъемная сила, создаваемая ротором, может быть уменьшена. В соответствии с этим по мере увеличения скорости горизонтального полета система автоматического управления уменьшает количество горячих газов, отходящих от воздушно-реактивного двигателей 2 и 3 к задним соплам 10 лопастей 4, находящихся в азимутальном положении от 90 до 270 градусов, и одновременно увеличивает количество горячих газов, поступающих к осевым соплам 11 лопастей 4, находящихся в азимутальном положении от 270 до 90 градусов. Практически это обеспечивается периодическим изменением количества топлива, сжигаемого в воздушно-реактивных двигателях 2 и 3.
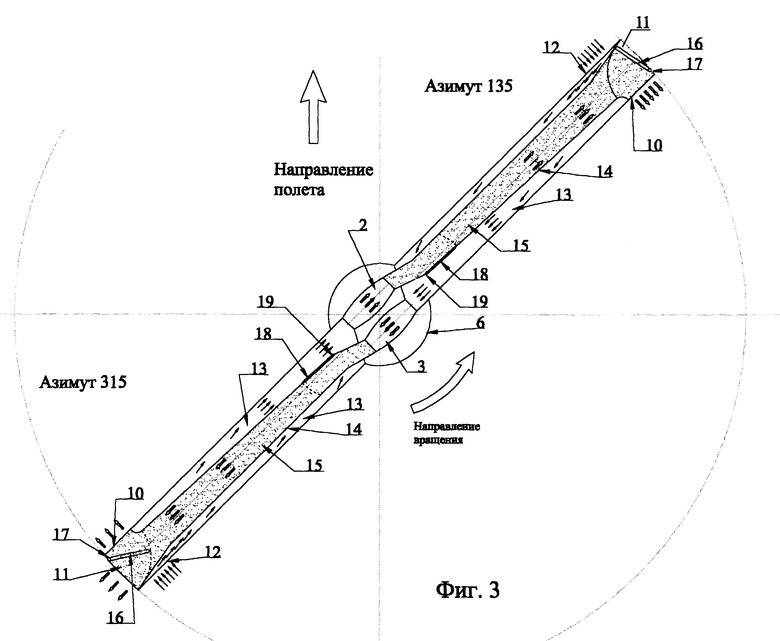
Т. е. уменьшают количество топлива, сжигаемого в воздушно- реактивном двигателе 2 или 3 в период, когда они подают горячие газы в лопасть 4, находящуюся в азимуте от 90 до 270 градусов, и одновременно увеличивают количество топлива, сжигаемого в воздушно-реактивном двигателе 2 или 3 в период, когда они подают горячие газы в лопасть 4, пока она находится в азимуте от 270 до 90 градусов (Фиг. 3). При вышеописанном регулировании количества горячих газов, истекающих через задние сопла 10 и осевые сопла 11, крутящий момент на роторе, частота его вращения и подъемная сила уменьшатся, а реактивная тяга в направлении полета, передаваемая от лопастей 4 фюзеляжу 7 через ось 1, увеличится. Уменьшение частоты вращения лопастей 4 приводит к уменьшению их лобового сопротивления в горизонтальном полете.
Аварийный выход из строя одного из воздушно-реактивных двигателей (например, двигателя 2) сохраняет несущую способность ротора летательного аппарата, так как соответствующее уменьшение крутящего момента на лопастях 4 может быть компенсировано увеличением количества сжигаемого топлива в оставшемся работоспособным двигателе (в данном случае - в двигателе 3).
При необходимости полета с более высокими скоростями, когда даже медленно вращающийся ротор создает недопустимо большое лобовое сопротивление, створки 16 газораспределителей в лопастях 4 устанавливают в положение, при котором полость 15 удлинительной трубы 14 соединена с осевыми соплами 11 на концевых частях лопастей, а створки 18 клапанов - в положение, при котором полость 15 удлинительной трубы 14 соединяется с полостью 13 для холодного воздуха. При этом крутящий момент, создаваемый двигателями 2 и 3, уменьшается, так как горячие газы не истекают из задних сопел 10. Подъемная сила создается от воздействия встречного воздушного потока на крылья 9 летательного аппарата, профиль и размеры которых выбраны для высоких скоростей полета. Под действием лобового сопротивления воздуха, действующего на лопасти 4, и при отсутствии крутящего момента вращение ротора замедляется. Затем включается тормозное устройство (на схеме не показано), обеспечивающее плавное торможение и остановку ротора. После остановки ротора осуществляется его фиксирование относительно фюзеляжа 7 в требуемом направлении вектора тяги (Фиг. 6). Двигатель 2, из которого горячие газы истекают по направлению движения, выключают. А створка 18 клапана задней по ходу лопасти 4 (находящейся в азимуте 0 градусов) переводится в положение, при котором внутренняя полость 13 лопасти 4 отделена от внутренней полости 15 удлинительной трубы 14.
Благодаря продолжающемуся по инерции горизонтальному движению летательного аппарата встречный поток холодного воздуха поступает в осевое сопло 11 по внутренним полостям 15 и 13 передней (по ходу движения) лопасти 4 подается к камере сгорания работающего двигателя 2. Горячие газы, выходящие из камеры сгорания воздушно-реактивного двигателя 2, по удлинительной трубе 14 поступают к осевому соплу 11 и создают реактивное тяговое усилие, направленное вдоль оси задней (по ходу движения) лопасти 4, передаваемое фюзеляжу 7 через ось 1. Таким образом летательный аппарат продолжает горизонтальный полет за счет реактивной силы горячих газов при минимальном лобовом сопротивлении лопастей 4 ротора, установленных по направлению полета и имеющих минимальную площадь лобового сопротивления. Лопасти 4 ротора также служат в качестве входного и выходного устройств воздушно-реактивного двигателя 2.
В режиме полета с неподвижным ротором, для непосредственного управления боковой силой в нужном направлении без изменения углового положения летательного аппарата система автоматического управления осуществляет поворот лопастей 4 относительно продольной оси фюзеляжа 7 на заданный угол и затем фиксирует их в новом положении (Фиг. 7). При этом происходит отклонение вектора тяги относительно продольной оси фюзеляжа 7 на тот же угол. Так как время поворота лопасти 4 невелико, то это позволяет сразу изменить траекторию полета в нужном направлении без изменения углового положения летательного аппарата, что также увеличивает его маневренность.
В случае аварийного выхода из строя воздушно-реактивного двигателя 2 на этапе полета с неподвижным ротором осуществляется поворот лопастей 4 ротора на 180 градусов, их фиксация и включение воздушно-реактивного двигателя 3 с соответствующим изменением положения створок 16 и створок клапана 18. Так как полет с неподвижным ротором осуществляется с достаточным запасом высоты и скорости, то за время поворота ротора для смены вышедшего из строя двигателя 2 или 3 аварии летательного аппарата не происходит.
Для перехода из режима высокоскоростного горизонтального полета в вертолетный режим (при вращающемся несущем роторе) сначала снижается скорость горизонтального полета, а затем ось 1 ротора растормаживается и начинает вращаться в режиме авторотации под действием встречного воздушного потока. Створки 16 газораспределителей в удлинительных трубах 14 лопастей 4 переводятся в положение, при котором полость 15 удлинительной трубы 14 соединена с реактивными задними соплами 10 на концевых частях лопастей 4, а створки 18 клапана - в положение, при котором полость 15 удлинительной трубы 14 отделена от полости 13 для холодного воздуха (Фиг. 3). Холодный воздух, поступающий под давлением от воздухозаборников 12, используется для запуска двигателя 2 (временно отключенного в режиме высокоскоростного горизонтального полета). Далее управление лопастью осуществляется как для горизонтального полета с вращающимся ротором (см. выше).
При отказе всех двигателей и для кратковременного создания дополнительной подъемной силы без использования двигателей 2 и 3 створки 16 газораспределителей в удлинительных трубах 14 лопастей 4 переводятся в положение, в котором полость 15 удлинительной трубы 14 соединена с реактивными соплами 10 на концевых частях лопастей 4, а створки клапана 18 - в положение, при котором полость 15 удлинительной трубы 14 разделена от полости 13 для холодного воздуха. Затем сжатый воздух, например из пневмо-аккумулятора, через каналы в оси 1 ротора подается в удлинительные трубы 14 лопастей 4 и далее выходит через реактивные сопла 10.
Комбинированная лопасть несущего ротора летательного аппарата может быть оснащена насадкой 20 для регулирования частоты вращения лопасти 4. Так, например, для торможения вращающихся лопастей осевые отклоняющие створки 23 поворачивают в положение, при котором горячие газы истекают из осевого сопла 11 под углом к продольной оси лопасти 4 в направлении вращения (Фиг. 8). При этом горячие газы, вытекающие из осевого сопла 11 навстречу вращению, создают реактивный момент, направленный в сторону, противоположную вращению лопастей 4, и вращение ротора замедляется. Так как тормозное усилие приложено к лопасти 4 на периферии, то уменьшается изгибающий момент от сил инерции вращающейся лопасти в сравнении с тормозными устройствами, размещаемыми на оси 1. Это позволяет увеличивать тормозной момент и быстрее тормозить лопасти 4 при меньшем риске их поломки.
Для создания реакции реактивной силы, приложенной к концевой части лопасти 4 вверх от ее плоскости вращения, система автоматического управления поворачивает нижнюю отклоняющую створку 22 и часть горячих газов будет истекать вниз от плоскости вращения лопасти 4. При этом создается реакция, приложенная к концевой части лопасти 4 и направленная вверх от плоскости ее вращения.
Для создания реакции реактивной силы, приложенной к концевой части лопасти 4 вниз от ее плоскости вращения, система автоматического управления поворачивает верхнюю отклоняющую створку 21 и часть горячих газов будет истекать вверх от плоскости вращения лопасти 4. При этом создается реакция, приложенная к концевой части лопасти 4 и направленная вниз от плоскости ее вращения. Таким образом изменяется скорость и амплитуда маховых движений лопасти 4. А это в свою очередь влияет на величину нагрузок, действующих на лопасть 4.
Комплексное управление положением отклоняющих створок 20, 22 и 24 и количества горячих газов, истекающих через заднее сопло 10 и осевое сопло 11, позволяет в любом азимутальном положении лопасти 4 создавать усилие (например, для гашения тряски лопастей), приложенное к ее концевой части требуемой величины и направления.
Список литературы:
1. Аэродинамическая компоновка и характеристики летательных аппаратов. - М. Машиностроение, 1991. - 256 с., ил.
2. Бауэрс П. Летательные аппараты нетрадиционных схем. - М.: Мир, 1991. - 320 с., ил.
3. Изобретение по заявке ФРГ N 1456071, 1968, В 64 С 27/18.
Изобретение относится к области авиации. Лопасть содержит воздухозаборник и выходное сопло, предназначенные для соединения с воздушно-реактивным двигателем (ВРД). Она снабжена осевым соплом, расположенным на торце лопасти и направленным вдоль оси лопасти, каналами для соединения ВРД с воздухозаборником, с выходным соплом и с осевым соплом. Имеется также газораспределительное устройство, расположенное между упомянутыми каналами, предназначенными для соединения с указанным ВРД, который размещен на оси вращения винта. Предложенный способ полета характеризуется тем, что вертикальные взлет и посадку осуществляют с использованием предложенной комбинированной лопасти, а горизонтальный полет осуществляют как до, так и после торможения до полной остановки несущего винта при истечении газов из упомянутого заднего выходного сопла перпендикулярно продольной оси лопасти и/или истечении газов из сопла, расположенного вдоль продольной оси лопасти в зависимости от направления полета и/или требуемого направления вектора тяги. Изобретение направлено на повышение маневренности и улучшение аэродинамических характеристик. 2 с. и 1 з.п.ф-лы, 8 ил.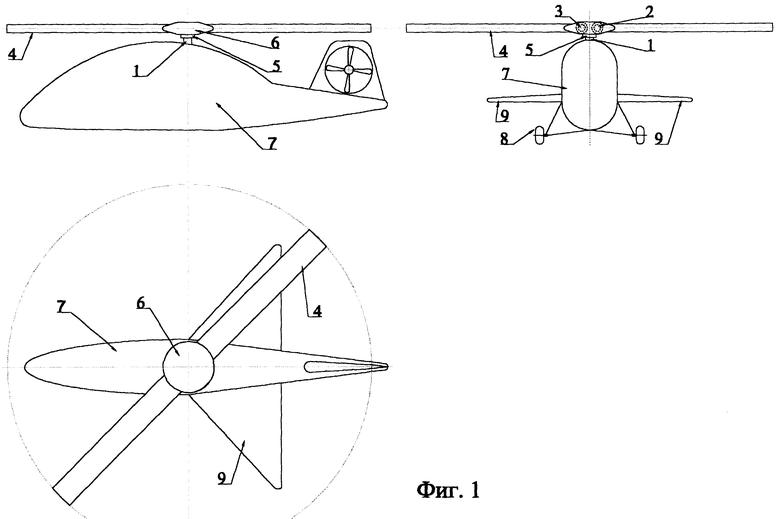
| Передвижная постройка для содержания скота | 1986 |
|
SU1456071A1 |
| СПОСОБ СОЗДАНИЯ РЕАКТИВНОЙ СИЛЫ ДЛЯ ВРАЩЕНИЯ РЕАКТИВНОГО ВИНТА ВЕРТОЛЕТА И ВЕРТОЛЕТНЫЙ СИЛОВОЙ АГРЕГАТ РЕАКТИВНОГО ПРИВОДА НЕСУЩЕГО ВИНТА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА ИМ.БЕЛИЦКОГО МИХАИЛА КОНСТАНТИНОВИЧА | 1992 |
|
RU2107643C1 |
| Способ регенерации загрязненного коксом цеолитсодержащего катализатора крекинга | 1977 |
|
SU1003740A3 |
| US 3865508 A 11.02.1975. | |||
