Изобретение относится к космической технике, в частности к транспортным контейнерам, предназначенным для доставки полезной нагрузки небольшой массы (микроспутников массой до 130 кг) на орбиту и ее отделения с требуемыми начальными параметрами.
Известно устройство для транспортировки и отделения полезной нагрузки (см. журнал Московский международный авиационно-космический салон. - М.: Афрус, ИПТК Лагос, 1995, с. 194-195).
Указанное устройство предназначено для хранения и транспортировки находящейся внутри полезной нагрузки (тактической ракеты) и ее отделения путем выбора "минометным" способом.
К недостаткам этого устройства можно отнести большие скорости, а также значительные перегрузки действующие на полезную нагрузку при ее отделении.
Известно также устройство для транспортировки и отделения полезной нагрузки от космического объекта, включающее корпус с крышкой и элементами крепления к космическому объекту, узел транспортировочной фиксации полезной нагрузки, механизм отделения полезной нагрузки в виде ложемента с пружинными толкателями и систему контроля (см. авт. В.П. Легостаев, В.Е.Миненко. Возвращаемая баллистическая капсула "Радуга" научно-производственного объединения "Энергия", Серия: "Ракетно-космическая техника, машиностроение". -М.: Центр научно-технической информации "Поиск", 1994). Указанное устройство является наиболее близким к предлагаемому по функциональному назначению и конструкции. По этой причине указанное техническое решение принято в качестве прототипа.
Конструкция этого устройства лишена недостатков аналога, но не в полной мере. Указанное устройство отделяет полезную нагрузку все же с достаточно большой скоростью (≈ 0,7 м/с) и значительными угловыми погрешностями. Кроме того, отделение полезной нагрузки осуществляется, как и в аналоге, минометным способом. Это в свою очередь может привести к ударному взаимодействию полезной нагрузки (микроспутника) с внутренней поверхностью корпуса, возможному повреждению оптических элементов и зацеплению за корпус (или заклиниванию) выступающими и раскрывающими элементами конструкции, а также не обеспечивает отделение микроспутника с малыми линейными и угловыми скоростями.
Технический результат предлагаемого устройства заключается:
- в обеспечении транспортировочной фиксации и хранения полезной нагрузки с заданными условиями эксплуатации на транспортном корабле на этапах подготовки, выведения на орбиту, в процессе совместного полета транспортного корабля с орбитальной станцией;
- в обеспечении условий периодического и предпускового контроля полезной нагрузки;
- в фиксации полезной нагрузки в заданном положении относительно космического объекта (транспортного корабля или орбитальной станции) перед отделением полезной нагрузки;
- в обеспечении начальных условий отделения от космического объекта и возможности повторения операции выдвижения при нештатных ситуациях;
- в возможности подзарядки химических батарей микроспутника от бортовой энергосистемы транспортного корабля - орбитальной станции.
Сущность изобретения заключается в том, что устройство для транспортировки и отделения полезной нагрузки от космического объекта, включающее корпус с крышкой и элементами крепления к космическому объекту, узел транспортировочной фиксации полезной нагрузки, механизм отделения полезной нагрузки в виде ложемента с пружинными толкателями и систему контроля, снабжено механизмом перемещения ложемента по длине корпуса и узлом центрирования ложемента относительно корпуса, при этом узел центрирования ложемента выполнен в виде направляющих элементов, равномерно размещенных на внутренней поверхности корпуса вдоль его образующей, и подпружиненных роликовых опор смонтированных на ложементе с возможностью взаимодействия с направляющими элементами, узел транспортировочной фиксации полезной нагрузки выполнен в виде элементов фиксации ложемента относительно корпуса и полезной нагрузки относительно ложемента и узла фиксации полезной нагрузки от поперечных перемещений, механизм отделения полезной нагрузки снабжен узлом фиксации полезной нагрузки на ложементе, выполненным в виде адаптерного элемента, закрепленного на полезной нагрузке, поворотных крюков, смонтированных на ложементе с возможностью взаимодействия с адаптерным элементом, и привода раскрытия крюков, при этом пружинные толкатели размещены на адаптерном элементе с возможностью взаимодействия с ложементом, а система контроля снабжена датчиками контроля текущего и конечного положения ложемента относительно корпуса. Механизм перемещения ложемента по длине корпуса выполнен в виде реверсивного электропривода с редуктором, смонтированными на торцевой части корпуса, двух пар звездочек, соединенных между собой посредством цепей, и механизмов регулирования натяжения цепей, при этом одна из звездочек каждой пары закреплена на одном из концов вала редуктора, вторая - на верхней части корпуса, а каждая из цепей в одной точке соединена с ложементом. Элементы фиксации ложемента относительно корпуса и полезной нагрузки относительно ложемента выполнены в виде болтовых соединений. Узел фиксации полезной нагрузки от поперечных перемещений выполнен в виде регулируемых опор, размещенных попарно симметрично в резьбовых отверстиях верхней части корпуса, и опорных площадок, смонтированных на внешней поверхности полезной нагрузки. Узел фиксации полезной нагрузки от поперечных перемещений выполнен в виде рамки со шпильками, размещенной в верхней плоскости корпуса и закрепленной относительно последнего, а шпильки размещены с возможностью взаимодействия с соответствующими отверстиями, выполненными в элементах силовой конструкции полезной нагрузки. Адаптерный элемент выполнен с опорными поверхностями для взаимодействия с поворотными крюками механизма фиксации полезной нагрузки на ложементе, отверстиями для крепления к полезной нагрузке и гнездами для размещения пружинных толкателей. Адаптерный элемент выполнен в виде профилированного кольца.
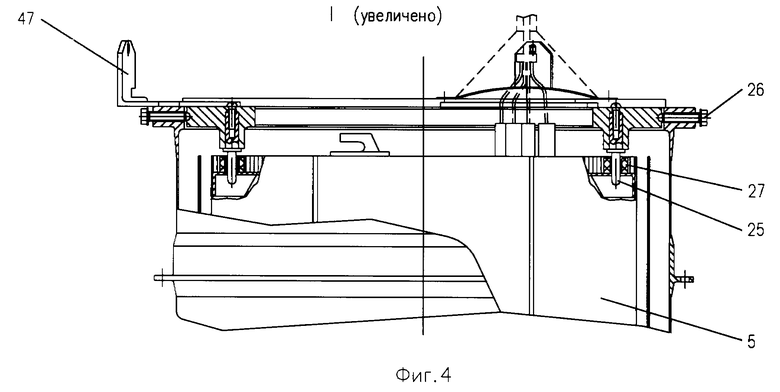
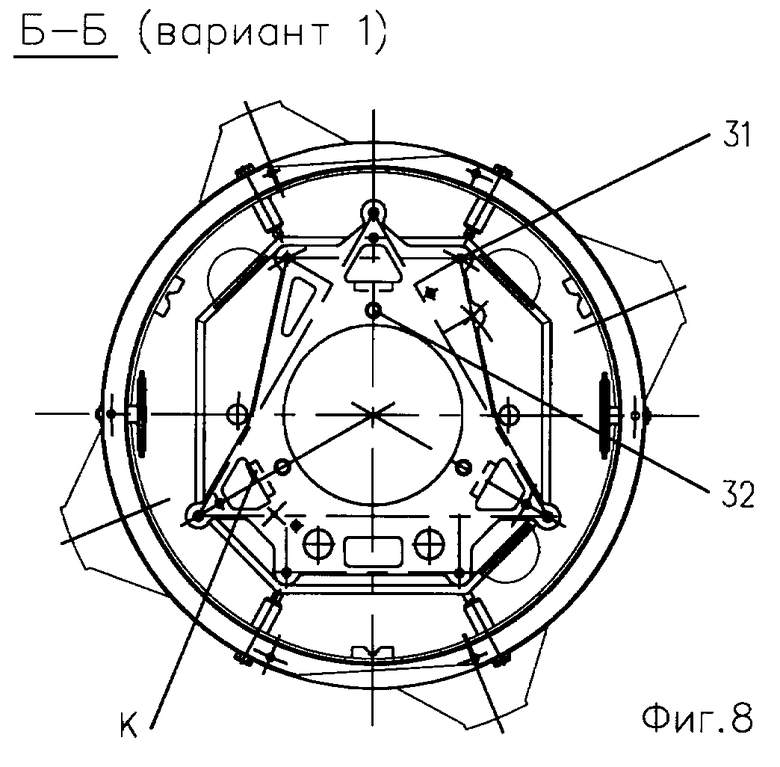
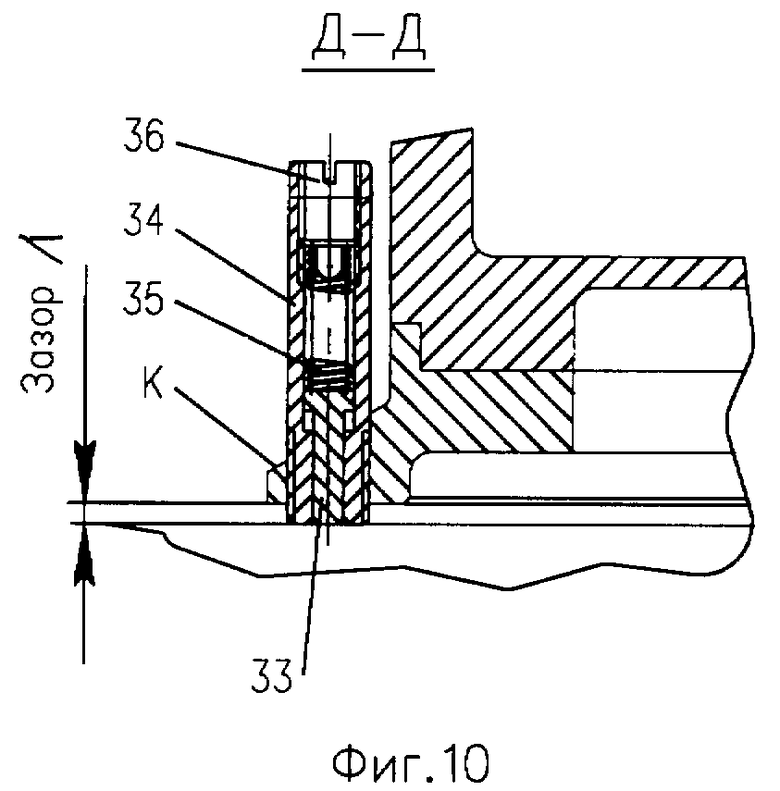
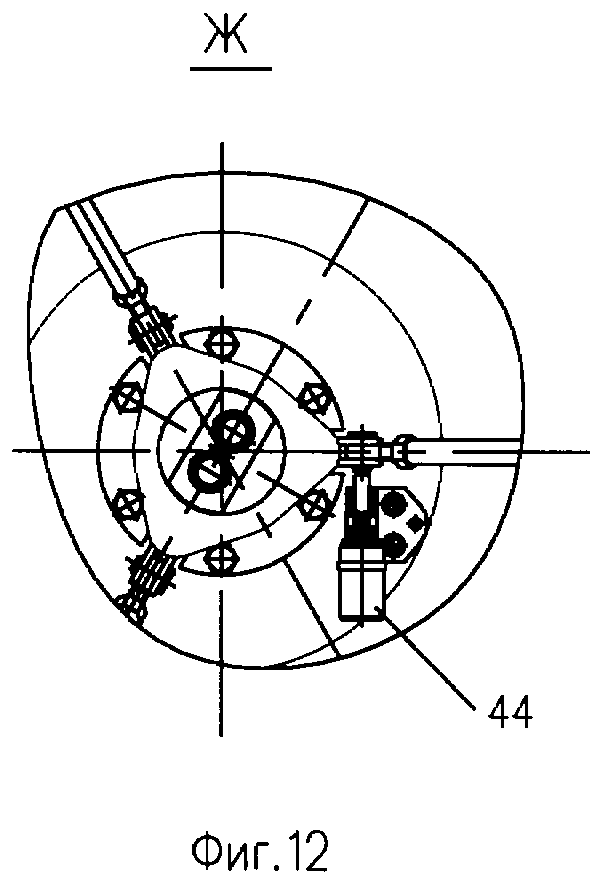
На фиг. 1 представлен общий вид устройства; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - сечение Г-Г на фиг. 1; на фиг. 4 - выноска I на фиг. 3; на фиг. 5 - выноска II на фиг. 3; на фиг. 6 - вид В на фиг. 1 (вариант 1); на фиг. 7 - вид В на фиг. 1 (вариант 2); на фиг. 8 - сечение Б-Б на фиг. 1 (вариант 1); на фиг. 9 - сечение Б-Б на фиг. 1 (вариант 2); на фиг. 10 - сечение Д-Д на фиг. 9; на фиг. 11 - вид Е на фиг. 5; на фиг. 12 - вид Ж на фиг. 5; на фиг. 13 - сечение И-И на фиг. 3; на фиг. 14 - транспортное положение устройства в грузовом отсеке корабля "Прогресс"; на фиг. 15 - рабочее положение устройства на стыковочном агрегате корабля "Прогресс" перед отделением полезной нагрузки.
Устройство для транспортировки и отделения полезной нагрузки от космического объекта включает корпус 1 с крышкой 2. Корпус 1 выполнен из верхнего, промежуточного, нижнего шпангоутов и обечайки. Внутри корпуса размещен ложемент 3. Последний выполнен в виде каретки 3. На верхней плоскости ложемента (каретки) 3 размещен адаптерный элемент 4, закрепляемый на полезной нагрузке 5. На ложементе (каретке) 3 имеются упоры 6.
Узел центрирования ложемента (каретки) 3 относительно корпуса 1 выполнен в виде трех роликовых опор 7 и трех направляющих элементов 8. Каждая из опор 7 представляет собой пару роликов, смонтированных на ложементе (каретке) 3 на индивидуальных кронштейнах 9 посредством осей 10. Кронштейны 9 каждой роликовой пары связаны с ложементом (кареткой) 3 механизмом регулирования усилий, который представляет собой размещенные в корпусе 11 пружины 12 и регулировочные винты 13, предназначенные для регулирования усилия поджатия опорных роликов 7 к направляющим элементам 8. Последние выполнены в виде профилей и закреплены на внутренней поверхности обечайки корпуса 1 вдоль его образующей.
Механизм перемещения ложемента (каретки) 3 вдоль корпуса 1 включает смонтированный на балке 14 электропривод 15 с редуктором 16 и двух пар звездочек 17, соединенных между собой цепями 18. При этом одна из звездочек 17 каждой пары закреплена на одном из концов выходного вала 19 редуктора 16, а вторая - на верхней части корпуса 1 посредством механизма регулирования натяжения цепи 20. Каждая из цепей 18 связана с ложементом (кареткой) 3 посредством соединительного звена - компенсатора 21. Балка 14 закреплена на нижнем шпангоуте корпуса 1.
Узел транспортировочной фиксации полезной нагрузки 5 выполнен в виде элементов фиксации ложемента (каретки) 3 относительно корпуса 1 и полезной нагрузки 5 относительно ложемента (каретки) 3 и узлов фиксации полезной нагрузки 5 от поперечных перемещений. При этом элементы фиксации ложемента (каретки) 3 относительно корпуса 1 и полезной нагрузки 5 относительно ложемента (каретки) 3 выполнены соответственно в виде болтовых соединений 22 и 23.
Узел фиксации полезной нагрузки 5 от поперечных перемещений выполнен в двух вариантах, один из которых (вариант 1) предпочтителен для полезной нагрузки с установочным размером меньше длины корпуса, а вариант 2 более универсален и обеспечивает фиксацию полезной нагрузки 5 с установочным размером превышающим длину корпуса 1.
Узел фиксации полезной нагрузки 5 от поперечных перемещений (вариант 1) выполнен в виде рамки 24 со шпильками 25. Рамка 24 размещена в верхней части корпуса 1 и закреплена посредством упоров 26. Шпильки 25 установлены с возможностью взаимодействия с отверстиями 27, выполненными в силовых элементах конструкции полезной нагрузки 5.
В другом конструктивном исполнении (вариант 2) узел фиксации полезной нагрузки 5 от поперечных перемещений выполнен в виде четырех опор 28 и четырех опорных элементов 29, смонтированных на полезной нагрузке 5. Опоры 28 размещены попарно симметрично в резьбовых отверстиях 30 верхней части корпуса 1.
Узел транспортировочной фиксации разгружает механизм отделения и выдвижения на участке выведения и в процессе орбитальной эксплуатации грузового корабля.
Механизм отделения полезной нагрузки 5 включает узел фиксации полезной нагрузки на ложементе (каретке) 3 и пружинные толкатели. Узел фиксации выполнен в виде адаптерного элемента 4, закрепленного на полезной нагрузке 5, поворотных крюков с приводом их раскрытия и пирозамка.
Адаптерный элемент 4 (вариант 1) выполнен в виде фрезерованной плиты, на которой выполнены опорные поверхности K, отверстия 31, для соединения с полезной нагрузкой 5, и гнезда 32 под пружинные толкатели. Каждый из пружинных толкателей выполнен в виде штока 33, размещенного в корпусе 34 и пружины 35 с регулировочным винтом 36.
Адаптерный элемент 4 (вариант 2) может быть выполнена в виде точеного профилированного кольца 37, в котором опорная поверхность K выполнена кольцевой формы.
Конструктивное исполнение адаптерного элемента 4 позволяет обеспечить контактные площадки между ложементом (кареткой) 3 и адаптерным элементом 4 незначительных размеров, обеспечивая по остальной площади возможного контакта гарантированный зазор Л. Это позволяет избежать возможной контактной сварки между ложементом (кареткой) 3 и адаптерным элементом 4 при длительной эксплуатации в условиях космического вакуума.
Узел фиксации полезной нагрузки 5 на ложементе (каретке) 3 выполнен в виде трех крюков 38, закрепленных с возможностью поворота посредством осей 39 на ложементе (каретке) 3 и связанных посредством тяг 40 с приводом их раскрытия 41. Последний выполнен пружинного типа и фиксируется в рабочем положении посредством пирозамка 42.
Система контроля включает угловой потенциометрический датчик 43 (телеметрический), установленный на редукторе 16, контактный датчик 44 (телеметрический) контроля раскрытия узла захвата полезной нагрузки, смонтированный на ложементе (каретке) 3 и контактный датчик 45 (командный и телеметрический) конца движения каретки, установленный на корпусе 1 в районе верхнего шпангоута. На внешней поверхности корпуса 1 смонтирована плата электроразъемов 46 (фиг. 2), предназначенная для подключения транспортного устройства к бортовым системам космического объекта (транспортного корабля, орбитальной станции).
На верхнем шпангоуте (как вариант на нижнем шпангоуте) корпуса 1 смонтированы элементы крепления устройства к космическому объекту, выполненные в виде кронштейнов 47.
Устройство снабжено комплектом съемных ручек 48, предназначенными для удобства работы космонавтов и устанавливаемыми на корпусе 1 перед проведением заключительных операций.
Для обслуживания полезной нагрузки 5 на корпусе 1 и в крышке 2 выполнены закрываемые лючки 49.
Устройство для транспортировки и отделения полезной нагрузки от космического объекта используется следующим образом.
На этапе начальной подготовки устройства производят регулировку натяжения цепей 18 механизма выдвижения ложемента (каретки) 3 посредством механизмов натяжения 20, осуществляют тарирование усилия штоков 33 пружинных толкателей и производят установку адаптерного элемента 4 на плоскость ложемента (каретки) 3.
При установке адаптерного элемента 4 осуществляют сжатие пружин 35 толкателей посредством штоков 33. После этого приводят в рабочее состояние механизм отделения полезной нагрузки 5, для чего три крюка 38, путем их поворота относительно осей 39 изменением длин тяг 40 вводят в зацепление с опорными поверхностями (кольцевой поверхностью - в случае кольцевого адаптера) K адаптерного элемента 4. При этом пружины привода 41 сжаты и зафиксированы в этом положении пирозамком 42. Для установки полезной нагрузки внутрь корпуса ложемент (каретку) 3 выдвигают в верхнее положение. Торец полезной нагрузки 5 крепят болтами через отверстия 31 к адаптерному элементу 4, установленному на ложементе (каретке) 3. Последнюю, вместе с установленной на ней полезной нагрузкой 5, опускают в нижнее положение до контакта упорами 6 с нижним шпангоутом корпуса 1. После этого осуществляют транспортировочную фиксацию полезной нагрузки 5. Фиксацию ложемента (каретки) 3 относительно корпуса обеспечивают болтами 22. Фиксацию полезной нагрузки 5 относительно ложемента (каретки) 3 осуществляют болтами 23. Закрепление полезной нагрузки 5 от поперечных перемещений осуществляют путем ввертывания в резьбовые отверстия корпуса 1 опор 28 до их контакта с опорными площадками 29 полезной нагрузки с созданием требуемого усилия поджатия.
Как вариант фиксацию от поперечных перемещений осуществляют путем введения шпилек 25 рамки 24 в отверстия 27, выполненные в элементах силовой конструкции полезной нагрузки 5, и закрепления рамки 24 относительно корпуса 1.
Корпус 1 закрывают крышкой 2, при этом через лючок 49 в крышке вводят кабель 50 для подключения разъемов полезной нагрузки к системам транспортного корабля (орбитальной станции).
Корпус 1 с полезной нагрузкой 5 устанавливают внутри транспортного корабля, например грузового корабля "Прогресс" (фиг. 14). Крепление корпуса 1 в грузовом корабле "Прогресс" осуществляют посредством шпилек балки 14 и транспортировочной рамы 51. Плату электроразъемов 46 подключают к ТМ-системе и системе электроснабжения транспортного корабля (орбитальной станции).
После выведения транспортного корабля на орбиту возможны две схемы использования устройства с полезной нагрузкой.
Схема 1 подразумевает в качестве космического объекта, от которого происходит отделение полезной нагрузки, использование транспортного корабля "Прогресс" (фиг. 15). Для этого за 1. ..2 суток до расстыковки корабля "Прогресс" от станции космонавты освобождают корпус 1 от крепления к раме 51 и выводят корпус 1 с полезной нагрузкой в свободный объем транспортного корабля. После чего, отворачивают и снимают болты 22 и 23 транспортной фиксации ложемента (каретки) 3 к корпусу 1 и полезной нагрузки 5 к ложементу (каретке) 3. Из отверстий 30 выворачивают и снимают опоры 28. После этого космонавты, пользуясь предварительно установленными ручками 48, переводят корпус 1 устройства к стыковочному агрегату грузового корабля и закрепляют его на шпангоуте стыковочного агрегата на кронштейны 47. Снимают ручки 48, производят расстыковку кабелей от разъемов полезной нагрузки 5, снимают защитную крышку 2. После расстыковки корабля "Прогресс" со станцией и его ухода от станции на определенное расстояние осуществляют заключительную операцию по отделению полезной нагрузки 5. Для этого подают команду на включение электропривода 15. Последний посредством редуктора 16 и цепей 18 осуществляет движение ложемента (каретки) 3 с полезной нагрузкой 5 относительно корпуса 1. При этом начало движения ложемента (каретки) 3 и ее промежуточное положение - контролируют потенциометрическим датчиком 43, а окончание движения ложемента (каретки) 3 контролируют датчиком 45. Соответствующее регулирование усилия поджатия роликовых опор 7 позволяет осуществить строго соосное движение ложемента (каретки) 3 с полезной нагрузкой 5 по длине корпуса 1, исключающее нежелательный механический контакт полезной нагрузки с внутренними стенками корпуса. При возникновении затруднений по выдвижению ложемента (каретки) 3 с полезной нагрузкой 5 есть возможность прекратить ее выдвижение, произвести реверс электропривода 15, вернуть ложемент (каретку) 3 в исходное положение и повторить операцию выдвижения.
Такая схема позволяет повысить надежность проведения эксперимента. Так при не отделении полезной нагрузки 5 (микроспутника) в зоне видимости ЦУПа можно микроспутник вновь "спрятать" внутрь корпуса 1, избежав, тем самым, переохлаждения его систем (в частности "замораживания" химических батарей) на теневых участках орбиты.
После выдвижения ложемента (каретки) 3 до верхнего шпангоута корпуса 1 полезная нагрузка 5 выходит из корпуса 1 полностью. В этом положении проводят проверку готовности систем полезной нагрузки 5 к самостоятельному полету и только после этого подают команду на ее отделение. При этом срабатывает пирозамок 42, освобождает пружины привода 41, который через тяги 40 поворачивает крюки 38. Механическая связь между полезной нагрузкой 5 и ложементом (кареткой) 3 нарушается. Срабатывание узла захвата полезной нагрузки 5 контролируют датчиком 45. Штоки 33 пружинных толкателей 33 придают полезной нагрузке 5 расчетную начальную линейную скорость в пределах от 0,02 до 0,1 м/с и обеспечивают угловые скорости по трем осям в пределах 0,5 град/с. Происходит "мягкое" отделение полезной нагрузки 5 (микроспутника).
Схема 2 подразумевает в качестве космического объекта, от которого происходит отделение полезной нагрузки, использование орбитальной станции. В этом случае устройство с полезной нагрузкой (микроспутником) космонавты переносят внутрь станции, а затем перемещают в космос и закрепляют его на внешней поверхности одного из модулей станции, используя для этого кронштейны 47, выполненные на нижнем шпангоуте корпуса 1. Крышку 2 корпуса 1 в этом случае выполняют с электроприводом. Управление процессом открытия крышки 2, выдвижения и отделения полезной нагрузки 5 осуществляют изнутри станции космонавтом. Эти операции происходят аналогично описанной выше схеме 1. В случае возникновения нештатной ситуации, ставящей под сомнение целевое использование полезной нагрузки 5, в процесс может вмешаться экипаж станции и провести необходимые работы с микроспутником или устройством при выходе в открытый космос.
Такая схема устройства позволяет иметь в составе станции некоторый "запас" целевых нагрузок различного назначения (инспектирование станции, проведение геофизических исследований, исследование явлений микрогравитации и др.).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ФИКСАЦИИ И ВЫДВИЖЕНИЯ ПОЛЕЗНОЙ НАГРУЗКИ ИЗ КОСМИЧЕСКОГО АППАРАТА | 2006 |
|
RU2353559C2 |
| УСТРОЙСТВО СТЫКОВКИ КОСМИЧЕСКИХ МОДУЛЕЙ | 2003 |
|
RU2269462C2 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗОВ, ПРЕИМУЩЕСТВЕННО ЗА ПРЕДЕЛАМИ НАХОДЯЩЕГОСЯ НА ОРБИТЕ КОСМИЧЕСКОГО КОРАБЛЯ | 2000 |
|
RU2167085C1 |
| ПИЛОТИРУЕМЫЙ КОСМИЧЕСКИЙ КОРАБЛЬ | 2005 |
|
RU2310586C2 |
| ТРАНСПОРТНАЯ КОСМИЧЕСКАЯ СИСТЕМА | 1998 |
|
RU2165870C2 |
| УСТРОЙСТВО ВЫПУСКА ТРОСА СВЯЗКИ ДВУХ КОСМИЧЕСКИХ АППАРАТОВ И СИСТЕМА УПРАВЛЕНИЯ ДЛЯ НЕГО | 1999 |
|
RU2148535C1 |
| УСТРОЙСТВО ДЛЯ УДЕРЖАНИЯ И ОСВОБОЖДЕНИЯ ТРАНСФОРМИРУЕМОЙ КОНСТРУКЦИИ, УСТАНАВЛИВАЕМОЙ НА КОСМИЧЕСКОМ ОБЪЕКТЕ | 1999 |
|
RU2155145C1 |
| УСТРОЙСТВО ДЛЯ ВЫДВИЖЕНИЯ ПОЛЕЗНОЙ НАГРУЗКИ ИЗ КОСМИЧЕСКОГО АППАРАТА | 2005 |
|
RU2302981C2 |
| ТРАНСФОРМИРУЕМАЯ КОНСТРУКЦИЯ | 2000 |
|
RU2167789C1 |
| БОРТОВОЙ КОМПЛЕКС ГРУЗОВОГО КОСМИЧЕСКОГО КОРАБЛЯ | 2001 |
|
RU2207308C1 |










Изобретение относится к космической технике, в частности к транспортным контейнерам для доставки полезной нагрузки (ПН) небольшой массы на орбиту и ее отделения с требуемыми параметрами. Устройство, согласно изобретению, содержит корпус, механизм перемещения и узел центрирования ложемента, а также механизм отделения и средства контроля и транспортной фиксации ПН. Механизм перемещения снабжен реверсивным приводом, кинематически взаимодействующим с ложементом. Узел центрирования имеет направляющие элементы и подпружиненные роликовые опоры на ложементе. Механизм отделения ПН имеет узел фиксации в виде закрепленного на ПН адаптера и установленных на ложементе поворотных крюков с приводом. На адаптере размещены толкатели, взаимодействующие с ложементом. Механизм транспортной фиксации обеспечивает фиксацию ложемента относительно корпуса и ПН от продольных и поперечных перемещений. Система контроля имеет датчики текущего и конечного положений ложемента на корпусе. Изобретение обеспечивает надежность всех основных контрольных и эксплуатационных операций с ПН как перед пуском, так и при работе на орбите. 6 з.п. ф-лы. 15 ил.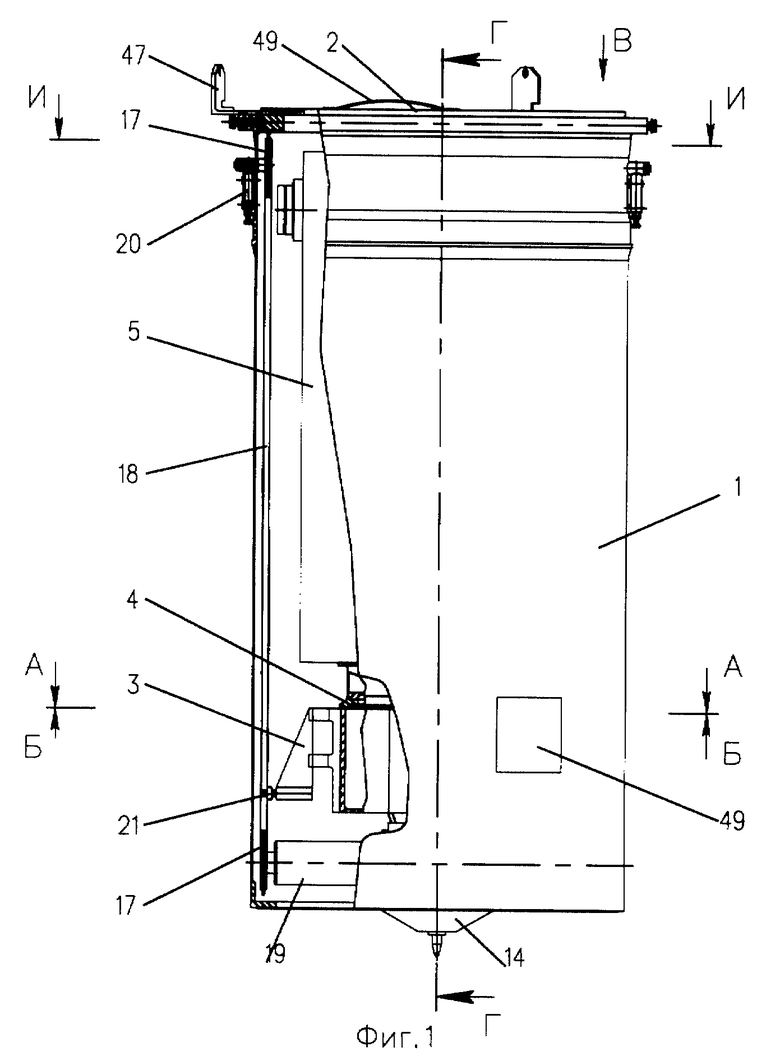
| Легостаев В.П | |||
| и др | |||
| Возвращаемая баллистическая капсула "Радуга" НПО "Энергия" | |||
| Сериал Ракетно-космическая техника | |||
| - М.: Машиностроение, ЦНТИ "Поиск", 1994 | |||
| Московский международный авиационно-космический салон, "Афрус" ИПТК "Лагос", 1995, с | |||
| Кран машиниста для автоматических тормозов с сжатым воздухом | 1921 |
|
SU194A1 |
| US 4776539 A, 11.10.1988 | |||
| Торфодобывающая машина с вращающимся измельчающим орудием | 1922 |
|
SU87A1 |

