Изобретение относится к области автомобилестроения, машиностроения и может быть использовано в трансмиссиях как переднеприводных, так и заднеприводных легковых автомобилей, грузовых автомобилей, а также других транспортных средств.
Известна гидродинамическая автоматическая коробка передач (АКП), патент Германии: DE 3263522, опубликованный 2 августа 1966 г. N.T. GENERAL DUAL RANGE TORQUE CONVERTER TRANSMISSION и патент Германии DE 2910111 C2, кл. F 16 H 41/04 от 17.10.1991 г., которая состоит из гидросцепления, принцип работы которого основан на "проскальзывании", и автоматической коробки передач, состоящей из нескольких простых или сложных планетарных механизмов, установленных рядами (планетарных рядов), управление которыми происходит автоматически с помощью гидродинамических устройств (масляного насоса и системы клапанов), управляющих фрикционными тормозными лентами, останавливающими, или, наоборот, позволяющими вращаться управляющим дискам. Управляющий диск может быть одет на любую из шестерен: коронную шестерню, водило, солнечную шестерню, - в зависимости от схемы включения простой планетарной системы.
Также известна трансмиссия, содержащая корпус и расположенные в нем вариатор и редуктор (патент Германии N 4104487, кл. В 60 К 17/06, 1991 г.). Известны также:
1. Бесступенчатая трансмиссия транспортного средства, содержащая корпус, последовательно расположенные в нем и связанные между собой вариатор и реверсивный редуктор (патент РФ RU 2108926 C1, кл. В 60 К 17/08, 05.09.1998 г.).
2. Автобусная гидромеханическая передача, содержащая двигатель, входной и выходной валы, гидродинамический преобразователь крутящего момента, совмещенный с гидрозамедлителем, в круге циркуляции которого расположены насосное, турбинное и реакторное колеса, тормоз включения гидрозамедлителя и планетарную коробку передач, включающую планетарные механизмы и фрикционные элементы управления (патент РФ RU 2104431 C1, кл. F 16 H 47/06, 20.05.1998 г.).
3. Составная трансмиссия коробки передач, содержащая многоскоростную основную секцию трансмиссии, соединенную последовательно с многоскоростной дополнительной секцией трансмиссии, входной вал, простирающийся в основную секцию трансмиссии, главный вал, простирающийся из основной секции трансмиссии в дополнительную секцию трансмиссии и выходной вал, простирающийся из дополнительной секции трансмиссий (патент РФ RU 2104171 C1, кл. B 60 K 17/08, 20.05.1998 г.).
Недостатками данных трансмиссий является то, что они весьма громоздки, имеют большой вес, требуют наличия коробки передач, включающей в себя планетарные механизмы и фрикционные элементы управления, а клиноременные вариаторы имеют ограниченный диапазон передаточных соотношений, а также недостатком является сложность, трудоемкость и высокая стоимость изделия. Наличие фрикционных элементов (тормозных лент) в гидродинамическом управлении коробкой определяет невысокие эксплуатационные возможности изделия в целом.
Предлагаемое устройство - гидродинамическая бесступенчатая коробка передач устанавливается между двигателем и трансмиссией транспортного средства вместо сцепления и коробки передач (механической, либо гидродинамической автоматической коробки передач) и является их полным функциональным заменителем, но с дополнительными эксплуатационными возможностями и потребительскими свойствами, такими как:
I* плавная регулировка коэффициента передачи вращения с двигателя на трансмиссию в любых возможных числовых значениях коэффициента передачи в заданных пределах с возможностями:
- электрического управления всем диапазоном коэффициента передачи,
- управления с использованием электронного узла управления всем диапазоном коэффициента передачи,
- управления с использованием радиоуправляемого сигнала всем диапазоном коэффициента передачи,
- автоматического управления всем диапазоном коэффициента передачи,
- и всех возможных их комбинаций;
II. * противоугонная система, не как отдельная навесная конструкция, а как неотъемлемая часть автомобиля, вписанная в конструкцию гидродинамической бесступенчатой коробки передач.
III. * принудительное автоматическое управление с использованием радиоуправляемого сигнала скоростью автомобиля (автомобилей) для:
- остановки и последующего обнаружения угнанных транспортных средств, если транспортное средство на момент оставления его владельцем по каким-либо причинам оказалось незакодированным,
- регулирования максимально допустимой скорости движения автомобиля (автомобилей) на дорогах в местах с повышенной опасностью радиосредствами работников ГИБДД;
IV. простота конструкции, низкая себестоимость и долговечность, так как в гидроприводе полностью отсутствует фрикционная передача вращения с первичного вала на вторичный и практически полностью отсутствует шестеренчатая передача вращения с первичного вала на вторичный, в 90% металлоемких деталей есть возможность использовать селуминовое литье, а полный отказ от использования в конструкции фрикционных деталей и фрикционных тормозных лент делает конструкцию более долговечной в сравнении с гидродинамической автоматической коробкой передач (АКП);
V. более высокий КПД гидродинамической бесступенчатой коробки передач по сравнению с КПД гидродинамической автоматической коробкой передач, гидросцепление которой для достижения "мягкости хода" использует эффект "проскальзывания", либо вариации эффекта "проскальзывания" с автоматически включаемыми фрикционами для увеличения КПД. КПД гидродинамической бесступенчатой коробки передач по сравнению с КПД гидродинамической автоматической коробки передач выше за счет отказа от применения в конструкции гидродинамической бесступенчатой коробки передач эффекта "проскальзывания" на высоких оборотах вращения двигателя и сведения его к минимуму - на низких оборотах вращения двигателя.
Предварительные расчеты показывают, что гидродинамическая бесступенчатая коробка передач может быть вписана в габаритные размеры существующих конструкций, а, следовательно, не потребует пересмотра конструкции автомобиля. Она может быть установлена также на бывший в эксплуатации автомобиль путем замены сцепления и коробки передач на гидродинамическую бесступенчатую коробку передач и последующим переоснащением салона автомобиля.
Задачами предлагаемого изобретения являются:
I. Сохранив достоинства существующего прототипа, создать более простое, более надежное, технологичное в изготовлении гидродинамическое устройство (гидропривод), коэффициент передачи которого изменяется бесступенчато в прямом и обратном направлениях движения:
- симметрично
- несимметрично,
габаритные размеры и вес которого не зависят от требуемого коэффициента передачи. Бесступенчатый гидропривод может быть использован в транспортных средствах:
1) с двигателем внутреннего сгорания,
2) с высокооборотным маломощным электродвигателем постоянного тока с очень массивным маховиком, установленными на электромобиле: маломощный высокооборотный электродвигатель постоянного тока при включении питания аккумуляторов раскручивает до 15000 -20000 об./мин очень массивный маховик и поддерживает эту угловую скорость постоянно, а за динамику движения электромобиля отвечает бесступенчатый гидропривод, небольшие габаритные размеры, вес и высокий коэффициент передачи (от 1000 до 1) которого позволяют:
а) эффективно и динамично управлять электромобилем, несмотря на малую мощность электродвигателя,
б) провести оптимизацию расхода электроэнергии батарей аккумуляторов и увеличить запас хода электромобиля между зарядками аккумуляторов,
3) с бестопливным двигателем, если удастся создать его более мощную и высокооборотную конструкцию, облегчив при этом управление включением и выключением бестопливного двигателя.
Включение заднего хода во всех случаях происходит включением кнопки заднего хода, а управление коэффициентом передачи этого гидропривода - электрическое.
II. На основе электрического управления коэффициентом передачи создать:
1) управление с использованием электронного узла управления всем диапазоном коэффициента передачи,
2) управление с использованием радиоуправляемого сигнала всем диапазоном коэффициента передачи,
3) автоматическое управление всем диапазоном коэффициента передачи.
III. На основе управления с использованием электронного узла управления коэффициентом передачи создать противоугонную систему, как неотъемлемую часть гидродинамической бесступенчатой коробки передач, установленную внутри корпуса гидродинамической бесступенчатой коробки передач.
IV. На основе управления с использованием радиоуправляемого сигнала всем диапазоном коэффициента передачи создать принудительное автоматическое управление с использованием радиоуправляемого сигнала скоростью автомобиля извне (снижение скорости автомобиля до уровня максимально допустимой величины в местах с повышенной опасностью).
Указанные задачи достигаются тем, что гидродинамическая бесступенчатая коробка передач, управляющая началом и концом движения транспортного средства, движением "вперед-назад", бесступенчато управляющая коэффициентом передачи вращения с двигателя на карданный вал, содержит первичный и вторичный валы, расположенные соосно и соединенные, соответственно, с маховиком двигателя и карданным валом, гидродинамический преобразователь крутящего момента, расположенный в корпусе, жестко соединенного с блоком цилиндров двигателя, в замкнутом объеме циркуляции гидродинамического преобразователя крутящего момента расположены первичный цилиндр насоса и дополнительный цилиндр насоса, жестко посаженные на первичный вал, реакторный цилиндр дополнительного гидротрансформатора, расположенный вокруг дополнительного первичного цилиндра насоса один в другом, реакторный цилиндр основного гидротрансформатора, расположенный вокруг первичного цилиндра насоса и вокруг реакторного цилиндра дополнительного гидротрансформатора, турбина вторичного цилиндра, жестко соединенная с вторичным валом, образующая замкнутое цилиндрическое пространство вокруг основного гидротрансформатора, дополнительного гидротрансформатора, первичного цилиндра насоса и дополнительного первичного цилиндра насоса, при этом основной и дополнительный гидротрансформаторы выполнены с соответствующими штоками управления.
Основным признаком, определяющим решение поставленных задач, является принцип принудительного вращения гидротрансформатора и принцип принудительного перемещения гидротрансформатора вдоль оси его вращения, в отличие от жестко закрепленного гидротрансформатора между вращающимся ведущим диском гидронасоса и ведомым диском гидротурбины в устройствах гидросцепления. Для реализации принципа принудительного перемещения и принудительного вращения гидротрансформатора наиболее приемлемой формой оказывается цилиндрическая форма ведущего гидронасоса и ведомой гидротурбины с лопатками, расположенными на рабочих цилиндрических поверхностях, торцевые (дисковые) стороны цилиндров в этом случае оказываются нерабочими. В связи с этим, форма гидротрансформатора должна быть цилиндрической.
Управление вращением гидротрансформаторов и перемещение вдоль оси вращения осуществляется с помощью шаговых электродвигателей. Это позволяет реализовать электрическое управление гидроприводом, управление с использованием электронного узла управления, автоматическое и управление гидроприводом с использованием радиоуправляемого сигнала.
Замкнутая внутренняя (рабочая) полость ведомой гидротурбины позволяет, используя масляный насос, собирать вытесненную через подшипник и зазоры штоков рабочую жидкость и контролировать давление в рабочей полости ведомой гидротурбины. Повысив давление в рабочей зоне можно увеличить КПД гидропривода.
В замкнутом объеме циркуляции гидродинамического преобразователя крутящего момента расположены:
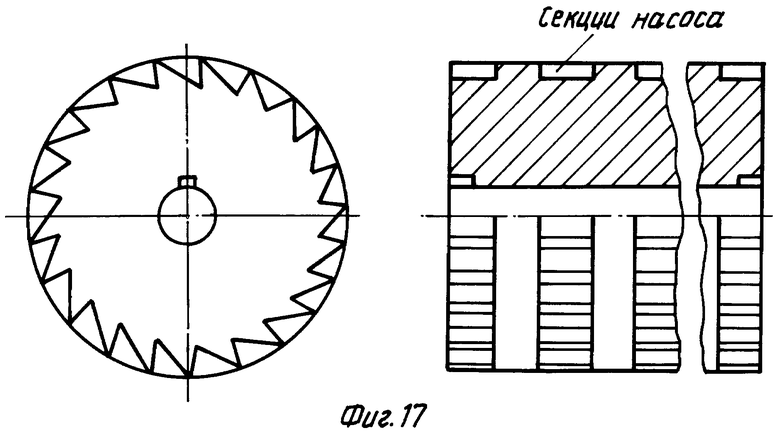
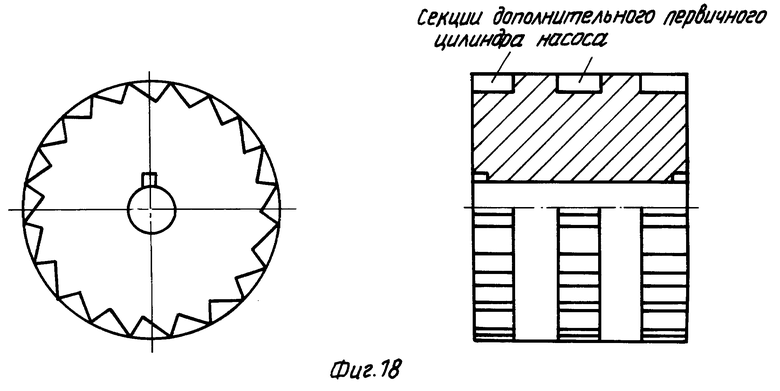
- секции первичного цилиндра насоса и секции дополнительного первичного цилиндра насоса, жестко посаженные на первичный вал,
- секции реакторного цилиндра дополнительного гидротрансформатора, последовательно чередующиеся левые с правыми, расположенные вокруг секций дополнительного первичного цилиндра насоса, имеющие две точки опоры на первичном валу через подшипники скольжения, а также имеющие возможность перемещения "влево-право" вдоль оси на расстояние, равное ширине секции, с помощью штоков, проходящих по скользящей посадке через втулку гидротрансформатора и жестко закрепленных к левой секции реакторного цилиндра дополнительного гидротрансформатора, втулка гидротрансформатора жестко закреплена к корпусу гидродинамической бесступенчатой коробки передач, поэтому штоки, вместе с реакторным цилиндром дополнительного гидротрансформатора, не имеют возможности вращения вокруг оси симметрии системы в динамическом режиме,
- секции реакторного цилиндра основного гидротрансформатора, последовательно чередующиеся левые с правыми, расположенные вокруг секций первичного цилиндра насоса, соединенные в торцах с гидротурбиной, образующей замкнутое цилиндрическое пространство вокруг секций реакторного цилиндра дополнительного гидротрансформатора, имеющие две точки опоры, на первичном валу и на втулке гидротрансформатора через подшипники скольжения, а также имеющие возможность перемещения "влево-право" вдоль оси вращения на ширину секции с помощью второй пары штоков, проходящих по скользящей посадке через втулку гидротрансформатора, и соединенных с левой частью гидротурбины реакторного цилиндра основного гидротрансформатора "встык", через подшипник качения, причем, скорость вращения и направление вращения основного гидротрансформатора вокруг оси вращения системы в динамическом режиме определяются взаимным расположением секций дополнительного первичного цилиндра насоса и секций реакторного цилиндра дополнительного гидротрансформатора.
Изменение направления вращения основного гидротрансформатора, от свободного вращения в одну сторону до принудительного вращения в другую сторону, определяет начало и конец вращения вторичного цилиндра, образующего замкнутое цилиндрическое пространство вокруг основного гидротрансформатора, дополнительного гидротрансформатора, первичного цилиндра насоса, дополнительного первичного цилиндра насоса. Турбина вторичного цилиндра жестко соединена с вторичным валом. Направление вращения турбины вторичного цилиндра в динамическом режиме определяется одним из двух крайних положений вращающегося основного гидротрансформатора, которые фиксируются второй парой штоков и возвратной пружиной.
Коэффициент передачи вращения с первичного цилиндра насоса на вторичный цилиндр турбины определяется отношением радиусов вторичного и первичного цилиндров и скоростью принудительного вращения основного гидротрансформатора. Управление началом и концом движения транспортного средства, движением "вперед-назад", коэффициентом передачи вращения с двигателя на карданный вал, производится линейным перемещением вдоль оси вращения первичного и вторичного валов двух пар штоков. Пара штоков, соединенная с основным гидротрансформатором, одним из двух своих крайних положений, определяет движение транспортного средства либо вперед, либо назад, а пара штоков, соединенная с дополнительным гидротрансформатором, управляющая свободным и принудительным вращением основного гидротрансформатора, а также скоростью принудительного вращения основного гидротрансформатора, определяет начало и конец движения транспортного средства, а также линейно изменяет коэффициент передачи вращения от двигателя на карданный вал.
Так как величина линейного перемещения штоков и силы, препятствующие линейному перемещению штоков, невелики, управление штоками можно производить посредством маломощных электродвигателей, или шаговых электродвигателей (шаговые электродвигатели более предпочтительны), размещенных снаружи корпуса гидропривода, либо внутри его (размещение шаговых электродвигателей снаружи корпуса наиболее предпочтительно). Электрическое управление коэффициентом передачи вращения,
началом и концом движения, движением вперед-назад, дает возможность обеспечить:
- управление с использованием электронного узла управления,
- автоматическое управление,
- управление с использованием радиоуправляемого сигнала и все возможные их комбинации, а также, на базе электронного управления началом и концом движения, коэффициентом передачи вращения, движением вперед-назад, противоугонную систему, как неотъемлемую часть конструкции автомобиля, вписанную в конструкцию гидродинамической бесступенчатой коробки передач, в отличие от известных отдельных навесных конструкций. На базе управления с использованием радиоуправляемого сигнала, принудительное автоматическое управление с использованием радиоуправляемого сигнала скоростью автомобиля для остановки и последующего обнаружения угнанного транспортного средства, если оно на момент оставления его владельцем по каким-то причинам оказалось незакодированным.
На базе управления с использованием радиоуправляемого сигнала, регулирование скорости автомобиля до уровня максимально допустимой скорости, если автомобиль превышает ее на дорогах в местах с повышенной опасностью, в местах с ограничением скорости движения, радиосредствами.
Дополнительный масляный насос с шестеренным приводом вращения от первичного вала, размещенный внутри корпуса гидропривода между корпусом и турбиной вторичного цилиндра, позволяет не только собрать и "возвратить" в рабочую зону выдавленное рабочим давлением масло в динамическом режиме работы через подшипники скольжения втулки гидротрансформатора и зазоры между штоками и отверстиями втулки гидротрансформатора, но и существенно поднять давление в рабочей зоне. Контроль за уровнем давления в рабочей зоне осуществляет редукционный клапан. Величина давления в системе ограничена жесткостью конструкции турбины вторичного цилиндра. Начальное повышенное давление в рабочей зоне дает возможность увеличить КПД гидродинамической бесступенчатой коробки передач в сравнении с аналогом.
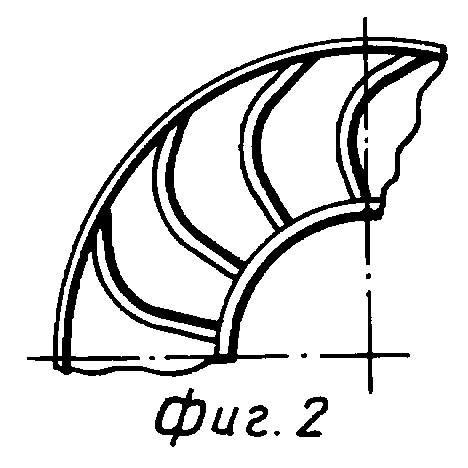
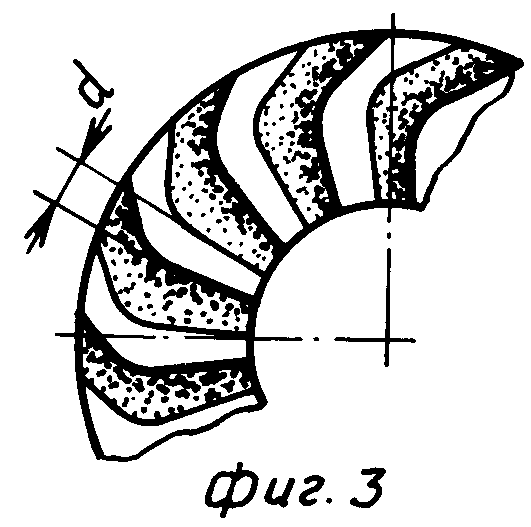
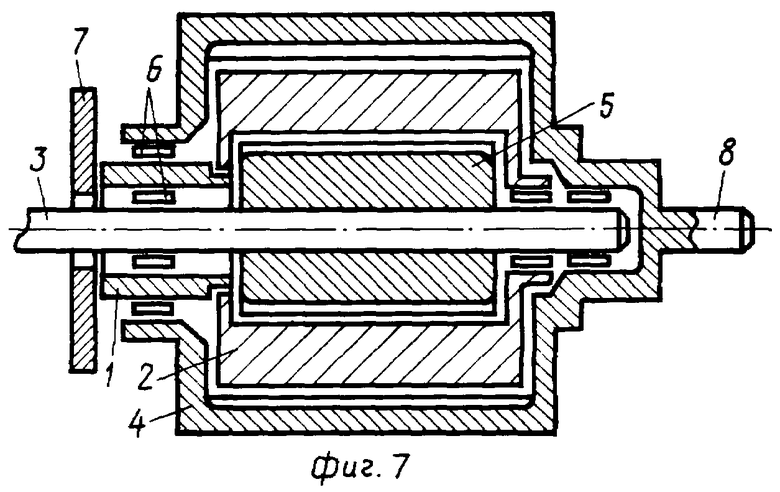
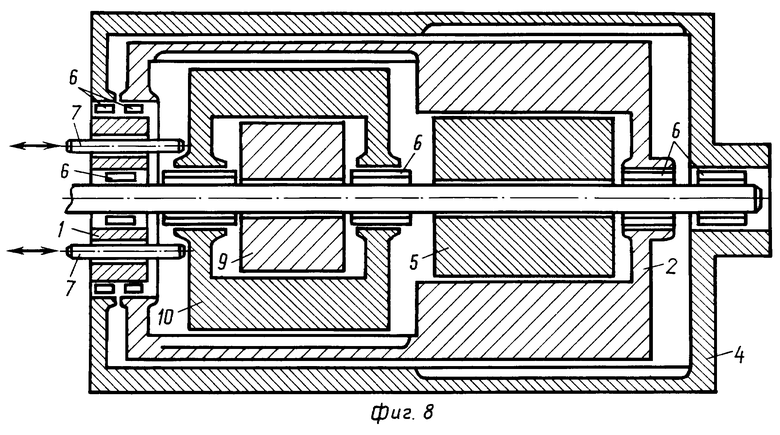
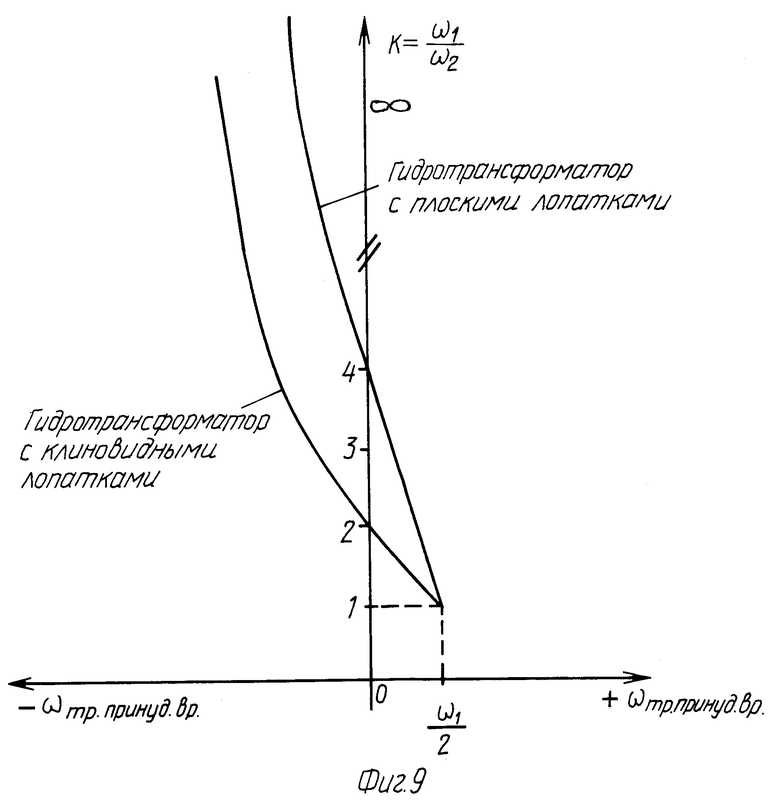
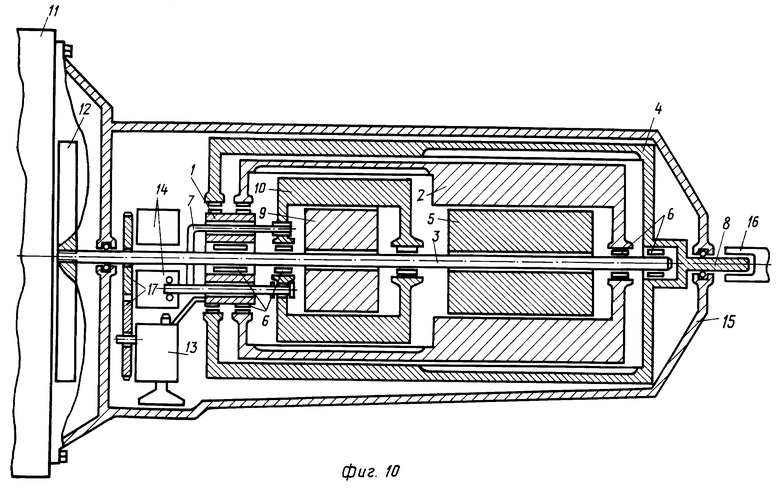
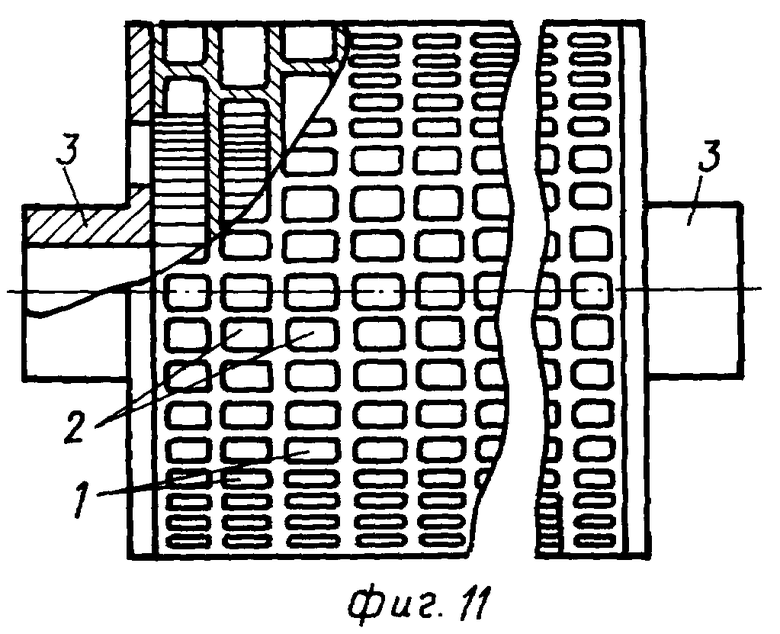
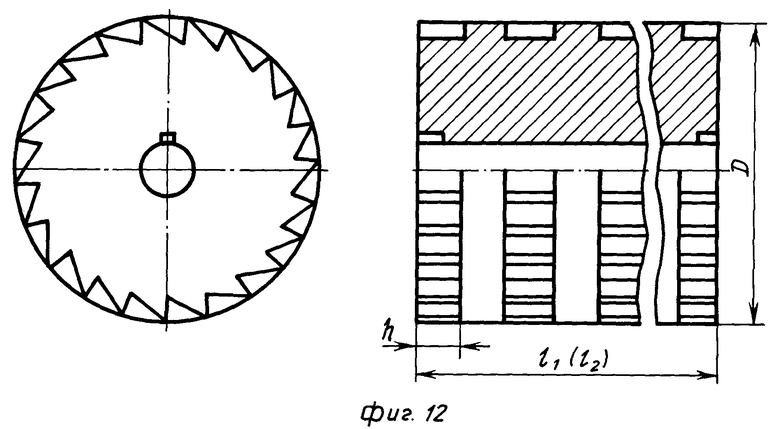
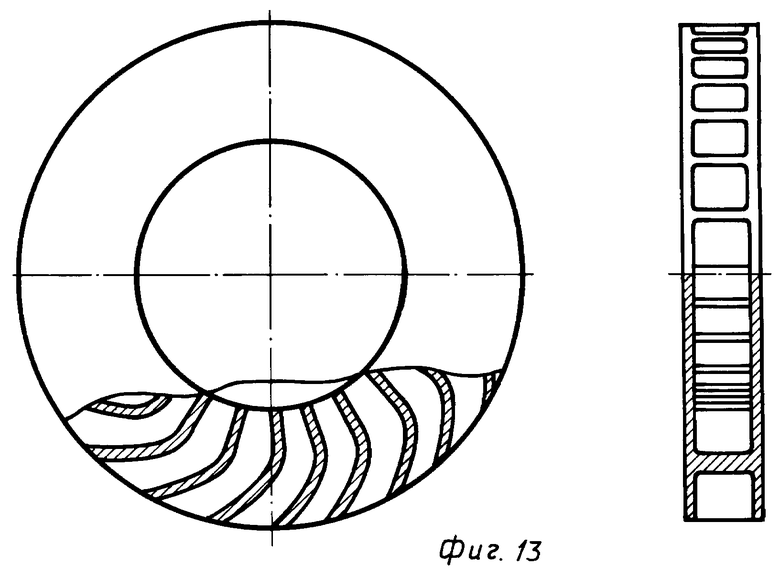
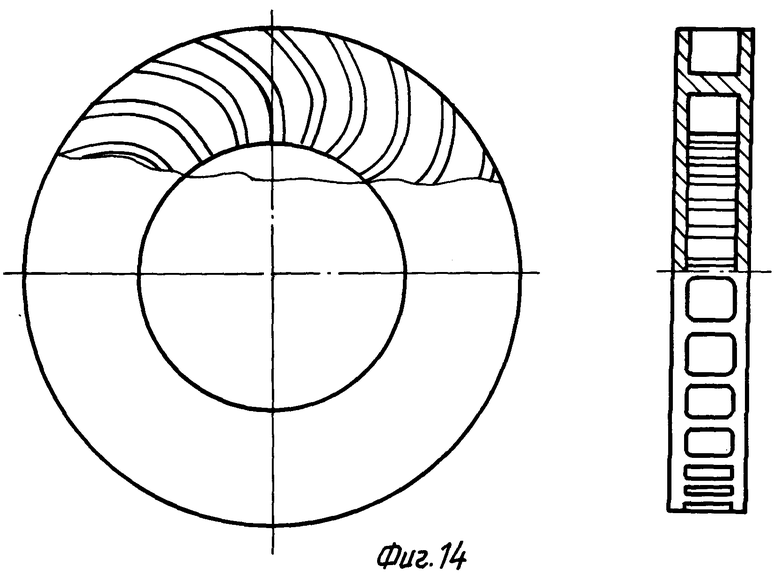
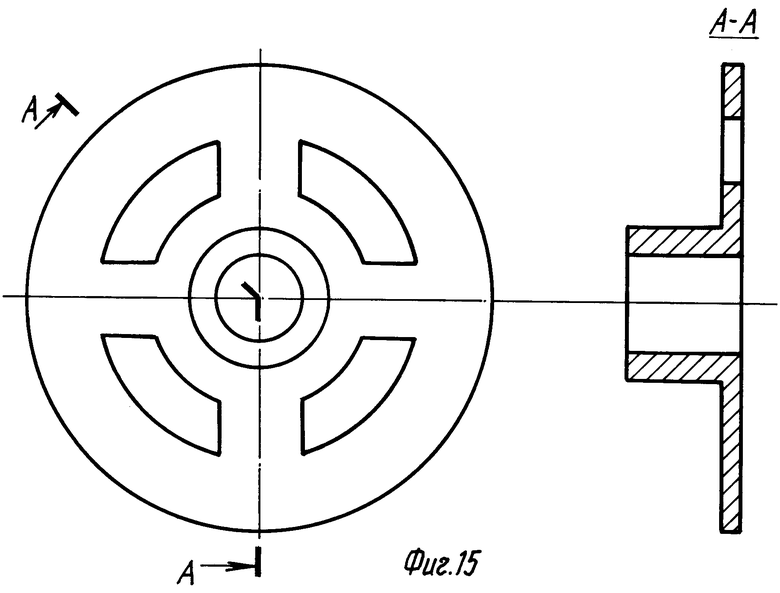
Конструкция гидродинамической бесступенчатой коробки передач поясняется чертежами, где на фиг. 1 приведена конструкция гидротрансформатора; на фиг. 2 - плоская конфигурация лопаток гидротрансформатора; на фиг. 3 - клиновидная конфигурация лопаток гидротрансформатора; на фиг. 4а - гидроцилиндр; 4б - гидроцилиндр с размещенными внутри лопатками гидротрансформатора; фиг. 5 - гидротрансформатор заторможен; фиг. 6 - гидротрансформатор не заторможен; фиг. 7 - конструкция гидропривода без возможности изменения коэффициента передачи; фиг. 8 - конструкция гидропривода с возможностью изменения коэффициента передачи, фиг. 9 - характеристики роста коэффициента передачи для плоских и клиновидных лопаток, фиг. 10 - гидродинамическая бесступенчатая коробка передач; фиг. 11 - дополнительный гидротрансформатор; фиг. 12 - первичный цилиндр и дополнительный первичный цилиндр; фиг. 13 - правая секция основного (дополнительного) гидротрансформатора;
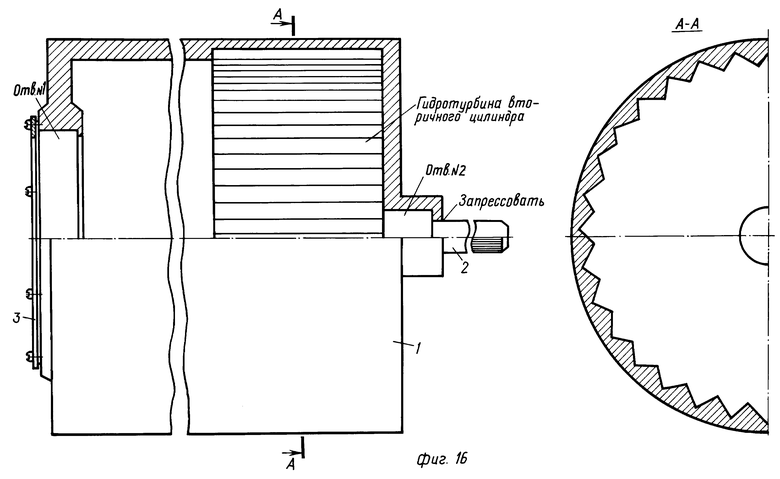
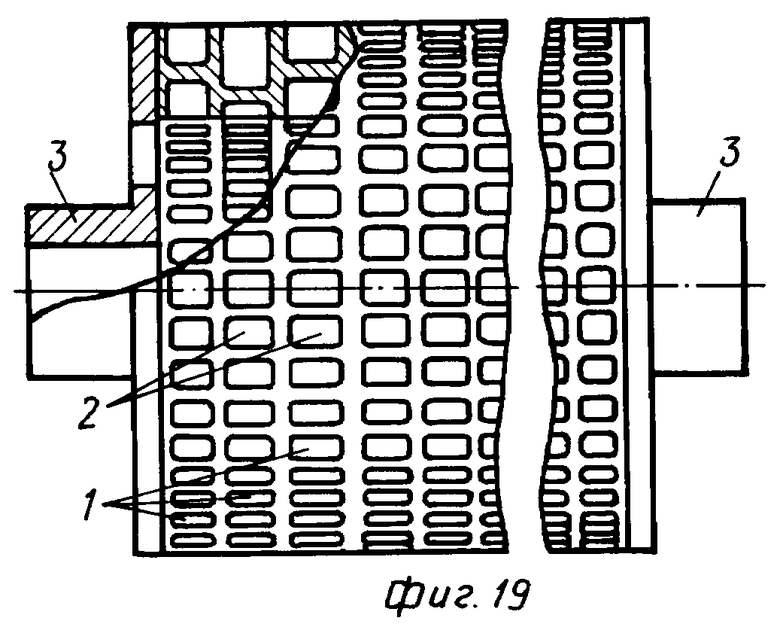
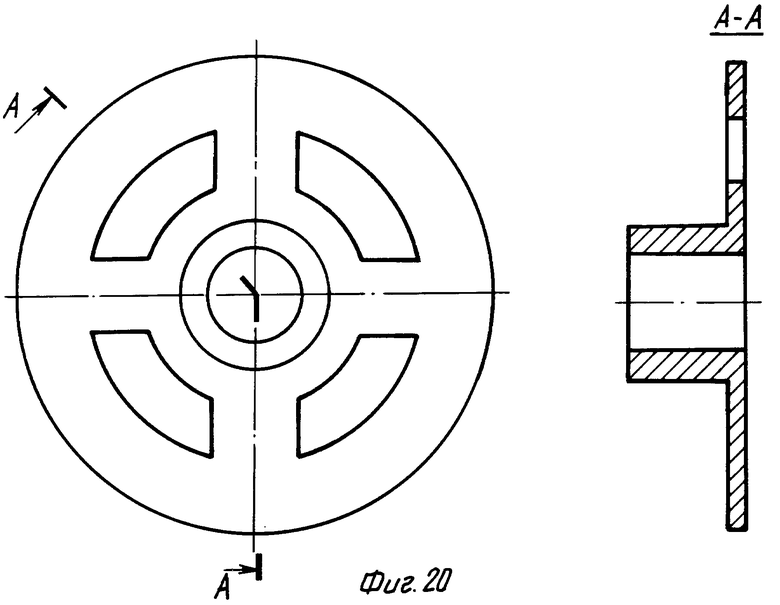
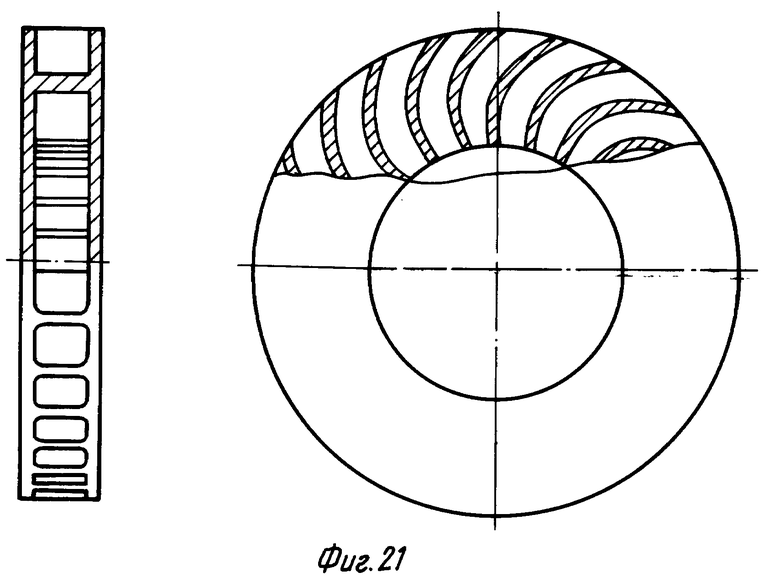
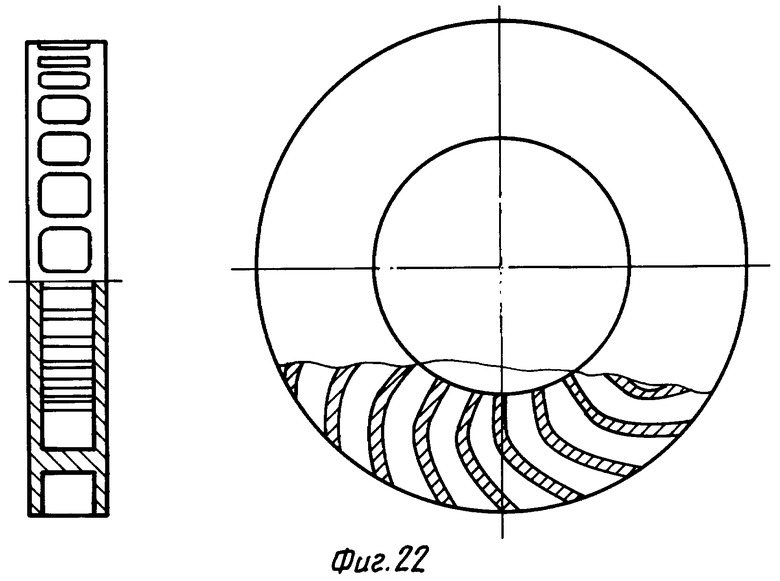
фиг. 14 - левая секция основного (дополнительного) гидротрансформатора; фиг. 15 - левая (правая) пластины основного (дополнительного) гидротрансформатора; фиг. 16 - гидротрансформатор вторичного цилиндра; фиг. 17 - первичный цилиндр насоса; фиг. 18 - дополнительный первичный цилиндр насоса; фиг. 19 - дополнительный гидротрансформатор; фиг. 20 - крышка реакторного цилиндра дополнительного гидротрансформатора; фиг. 21 - правая секция реакторного цилиндра дополнительного гидротрансформатора; фиг. 22 - левая секция реакторного цилиндра насоса дополнительного гидротрансформатора.
Гидродинамическая бесступенчатая коробка передач содержит втулку гидротрансформатора 1 (см. фиг. 10), основной гидротрансформатор 2 (фиг. 7, 8, 10), вал первичный 3, первичный 4 и вторичный 5 цилиндры, кольца подшипников 6, шток 7, вал вторичный 8, дополнительный первичный цилиндр 9 и дополнительный гидротрансформатор 10, двигатель 11, маховик 12, масляный насос 13, шаговые электродвигатели 14, корпус 15, карданный вал 16, шестерни привода масляного насоса 17.
При включении зажигания двигатель 11 (см. фиг. 10) начинает вращать маховик 12. Маховик приводит во вращательное движение первичный вал 3, на котором жестко закреплены и, соответственно, также начинают вращаться первичный цилиндр насоса 5, дополнительный первичный цилиндр насоса 9 и шестерни привода масляного насоса 17. Вращение шестерни привода масляного насоса обеспечивает наличие давления рабочей жидкости в рабочей зоне солнечного гидропривода, а клапан масляного насоса обеспечивает нужную величину рабочего давления Pраб.
Шаговый электродвигатель 14, соединенный через подшипник штоком 7 с основным гидротрансформатором 2, имеет два рабочих положения "вперед-назад" и включается кнопкой от водителя "вперед-назад" в зависимости от нужного направления движения.
Шаговый электродвигатель 14, жестко соединенный штоком 7 с дополнительным гидротрансформатором 10, удерживаемым от вращения жестко закрепленной кронштейнами к корпусу 15 втулкой гидротрансформатора 1, отвечает за линейное перемещение дополнительного гидротрансформатора вдоль оси вращения системы, создавая тем самым все возможные варианты перекрытия секций дополнительного первичного цилиндра насоса 9 с левыми (фиг. 22) и правыми (фиг. 21) секциями дополнительного гидротрансформатора 10, обеспечивая таким образом управление скоростью вращения и направлением вращения основного гидротрансформатора 2.
Вращающиеся рабочие секции дополнительного первичного цилиндра насоса 9, совмещенные с левыми или правыми секциями дополнительного гидротрансформатора 10, возмущают рабочую жидкость, находящуюся под рабочим давлением Pраб..
Дивергенция потока возмущенной лопатками секций дополнительного первичного цилиндра насоса 9 жидкости, направленная лопастями секций дополнительного гидротрансформатора 10 в нужную левую (для движения назад) или правую (для движения вперед) сторону, начинает, в зависимости от расположения секций дополнительного гидротрансформатора и дополнительного первичного цилиндра насоса, либо затормаживать вращение основного гидротрансформатора 2 (в нейтральном положении он вращается в сторону, противоположную вращению первичного вала), что соответствует началу вращения вторичного вала 8 в сторону вращения первичного вала на пониженной передаче, либо останавливать вращение основного гидротрансформатора (более высокая пониженная передача), либо вращать основной гидротрансформатор в сторону вращения первичного вала, что соответствует вращению вторичного вала на повышенных передачах.
Вращающиеся рабочие секции первичного цилиндра насоса 5, совмещенные с левыми (для движения назад) или с правыми (для движения вперед) секциями основного гидротрансформатора 2, возмущает рабочую жидкость, находящуюся под рабочим давлением Pраб.. Дивергенция потока возмущенной лопатками секций первичного насоса 5 жидкости и направленная лопастями секций основного гидротрансформатора 2 в нужную левую (для движения назад) или правую (для движения вперед) сторону, начинает вращать в нужную сторону лопатки турбины вторичного цилиндра 4, с которым жестко соединен выходной (вторичный) вал 8. Скорость вращения вторичного вала 8 зависит от скорости вращения первичного вала 3 и от площади перекрытия секций дополнительного гидротрансформатора 10 с рабочими секциями дополнительного первичного цилиндра насоса 9.
1. Работы по созданию автоматических коробок передач начались с 1932 г.
Предлагались разные конструкции:
передвижение шестерен и синхронизаторов в соответствующее положение с помощью давления жидкости, давления сжатого воздуха, электричества, разряжения воздуха. Фирмы "Крайслер", "Шевроле", "Пакард", для передвижения шестерен и синхронизаторов использовали разряжение. Фирма "Катлер-Хаммер" на автомобилях "Премьер" первые устройства выполнила на электросоленоидах: на щитке приборов было 4 кнопки, водитель выбирает 1, 2, 3, R-задн. нужную передачу, включает сцепление, затем включает кнопкой передачу. Недостаток соленоидов - большой расход электроэнергии на них.
В отличие от этой системы в "электрической руке", применявшейся позднее фирмой "Хадсон", небольшой соленоид перемещал клапан, который под действием разряжения осуществлял переключение передач. В автомобиле "Додж" американского производства впервые была применена гидромуфта в сочетании с обычной механической коробкой передач. Преимущества: двигатель работает без перегрузок при буксировках тяжелых грузов за счет проскальзывания муфты, муфта поглощает вибрации и неравномерности вращения коленчатого вала, предохраняет двигатель от ударных нагрузок, также за счет проскальзывания муфты можно удерживать автомобиль "на горке" с включенным двигателем с помощью педали газа, не включая тормозов.
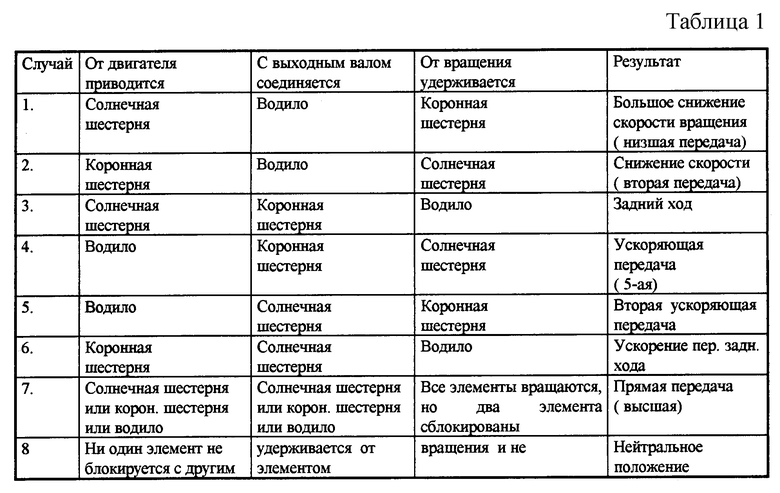
Современные автоматические коробки передач стали производиться после удачного применения в конструкциях простой планетарной системы. Возможных вариантов работы простых планетарных механизмов 8.
В планетарных системах, в отличие от шестеренных передач обычных коробок, где может быть осуществлено почти любое передаточное число, зависящее от числа зубьев шестерен, находящихся в зацеплении, возможное количество передаточных отношений ограничено. В одной планетарной коробке передач нельзя получить даже те варианты, которые отражены в таблице, так как невозможно менять местами соединения. Поэтому, чтобы получить трех или четырехступенчатую планетарную коробку, надо установить несколько планетарных рядов или применять системы с двумя комплектами сателитов. В современных коробках применены оба этих способа.
II. Принцип действия гидросцепления основан на передаче вращения от первичного диска посредством возмущенной лопатками первичного диска среды (масла) вторичному диску, также оснащенному лопатками. Для повышения КПД гидросцепления, между вращающимися первичным и вторичным дисками (ω1 ≠ 0; ω2 ≠ 0; ω1 > ω2) устанавливается жестко закрепленный к корпусу гидросцепления гидротрансформатор (ωтр = 0 всегда для гидросцепления),
где: ω1 - угловая скорость первичного диска;
ω2 - угловая скорость вторичного диска;
ωтр - угловая скорость гидротрансформатора (см. фиг. 1).
Гидротрансформатор, пропуская сквозь свои лопатки возмущенную лопатками первичного диска среду (масло), ориентирует ее движение в пространстве таким образом, что создает "нормальное" (под перпендикулярным углом) падение жидкости на лопатки вторичного диска, повышая тем самым КПД всего узла. Реально для гидросцепления ω2 < ω1 ≈ 20% за счет упругих потерь в жидкости (эффект проскальзывания). Эффект проскальзывания снижается в случае повышения ω1 и повышается в случае снижения ω1, этим собственно, обеспечивая "мягкость" хода всей системы, и обуславливает сцепление первичного и вторичного валов, начиная с определенного значения ω1 (как правило не ниже 1000 об/мин). Проскальзывание снижается до определенного уровня с ростом ω1 и в районе 2000-3000 об/мин снижение проскальзывания останавливается и далее оно ≠ 0.
Теоретически можно свести проскальзывание к нулю за счет явления "жесткой воды" (термин), то есть увеличить давление масла в системе, но тогда:
1. С ростом КПД снижается плавность хода (то, ради чего, собственно, сделано гидросцепление).
2. Потребуется установка второй оболочки корпуса гидросцепления и установка между двумя корпусными оболочками масляного насоса. То есть бесперспективность этого пути - очевидна.
Все современные автоматические коробки передач, оценив преимущества "Доджа", комплектуются гидросцеплением для улучшения динамических характеристик автомобиля (плавность хода). Хотя гидросцепление и уменьшает КПД автомобиля, но тот, кто позволяет себе такое дорогое устройство (АКП+гидросцепление), может позволить и компенсацию потерянной мощности гидросцепления за счет более мощного двигателя.
III. Принцип работы планетарного механизма в том, что вращение с шестерни первичного вала (внутренней шестерни) передается на шестерню вторичного вала (наружную шестерню) посредством шестерен "водила" (их, как минимум, три штуки) только в том случае, если шестерни "водила" заторможены. Коэффициент передачи в этом случае равен отношению длин окружностей двух шестерен. Направление вращения шестерен 1 и 2 - противоположны (см. таблицу 1 случай 3).
Попробуем представить себе модель планетарного механизма, в котором обе шестерни выполнены не в плоском виде, как обычно, а в виде цилиндров, а вместо зубьев у них лопатки: у наружного цилиндра - внутренняя, а у внутреннего - наружная, роль же шестерен "водила" (передатчика движения с первичной шестерни на вторичную) выполняет масляная среда (см. фиг.1 разрез А-А через гидротрансформатор).
В отличие от планетарного механизма, направление вращения внутреннего ведущего цилиндра и внешнего ведомого одинаково, но в отличие от гидросцепления, коэффициент передачи которого w 1, y гидропривода коэффициент передачи теоретически для случая "жесткой воды" и заторможенного гидротрансформатора равен отношению длин окружностей или отношению радиусов наружного и внутреннего цилиндров, либо квадрату отношения их радиусов (два этих случая рассмотрим ниже; при разных конструкциях гидротрансформатора закономерности будут разные).
Случай 1.
Конфигурация лопаток гидротрансформатора - плоская. Поворот потока жидкости идет с изменением объема (то есть hлопатки - по всей длине const). см. фиг. 2.
Второй закон гидродинамики (закон сохранения количества движения для упругих сред)
I1•ω1 = I2•ω2+Ix•ωx,
где Ix•ωx - упругие потери.
Запишем этот закон для случая, когда Ix•ωx = 0, то есть для случая отсутствия упругих потерь ("жесткая вода").
I1•ω1 = I2•ω2
Коэффициент передачи k = ω1/ω2, следовательно
k • I1=I2, т.e. k=I2/I1.
Момент инерции равен I = F • r, следовательно
Сила F = P • S, где P - давление жидкости, S - площадь цилиндра, (S1 - площадь внутреннего цилиндра, S2 - площадь наружного цилиндра).
Отсюда 
для замкнутого контура давление во всех точках одинаково, следовательно, 
если l1 = l2, то  . Для случая r2 = 2 • r1, k = 4.
. Для случая r2 = 2 • r1, k = 4.
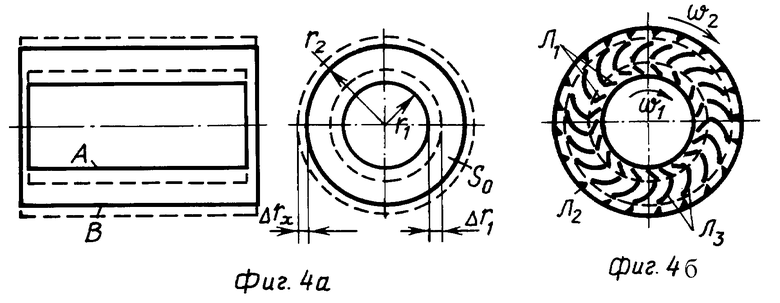
В подтверждение этого рассмотрим еще один случай. На сколько меняется радиус наружного цилиндра, если радиус внутреннего цилиндра изменился (r1+Δr), а объем жидкости между двумя цилиндрами остается - const (см. фиг. 4а). Герметичный цилиндр A находится внутри герметичного цилиндра B, а промежуточный объем между двумя цилиндрами полностью заполнен идеальной жидкостью. Рассмотрим случай, когда радиус цилиндра B равен двум радиусам цилиндра A, т.е. r2 = 2 • r1. Если каким-то образом объем цилиндра A изменился за счет изменения радиуса (r1+Δr), то, на сколько изменится радиус цилиндра B? То есть, чему равно Δrx?
Если впоследствии, в объеме, занятом жидкостью, разместить лопатки гидротрансформатора Л3 (фиг. 4б) для изменения направления детонирующей жидкости: то наружный цилиндр совершит вращение в сторону разворота лопаток Л3 на угол ϕ, примерно равный отношению Δrx к радиусу цилиндра B, т.е. к 2 • r1. Если, практически, изменение объема цилиндра A осуществлять вращая его вокруг оси симметрии с большой угловой скоростью, а наружную поверхность его оснастить лопастями Л1, то лопасти и будут, вращаясь вместе с цилиндром A, "выдавливать" жидкость из области r1+Δr. Если "угол атаки" у лопастей Л1 равен 45o, то векторная скорость элементарного объема жидкости, "отскочившей" от лопатки Л1, будет равна в численном выражении векторной скорости лопатки Л1, направления же векторов их скоростей будут перпендикулярны. "Элементарные объемы" детонированной жидкости, собранные в общий поток и направленные в нужную сторону лопастями гидротрансформатора Л3, взаимодействуют с внутренней стороной наружного цилиндра, также оснащенной приемными лопастями Л2. Наружный цилиндр, как уже говорилось выше, начинает вращаться с угловой скоростью  при том, что внутренний цилиндр вращается с угловой скоростью ω1 = Δr1/r1•t. Коэффициент передачи вращения k = ω1/ω2 = 2•Δr1/Δrx, см. фиг. 4б.
при том, что внутренний цилиндр вращается с угловой скоростью ω1 = Δr1/r1•t. Коэффициент передачи вращения k = ω1/ω2 = 2•Δr1/Δrx, см. фиг. 4б.
Sc = π•(2•r1)2-π•r
следовательно 
отсюда 
тогда π•(4•r1•Δrx+Δr
внесем +4 • r1 2 - 4 • r1 2,
получим 4•r
то есть 
тогда 
но, 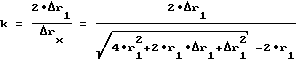
Теперь, если, например, r1 = 10, а Δr1 = 1 (напомним, что это случай r2 = 2 • r1), то k ≈ 4.
Случай 2.*
Конфигурация лопаток гидротрансформатора - клиновидная. Поворот потока жидкости идет без изменения ее объема. Размер d - расстояние между лопатками по всей длине - const (см. фиг. 3).
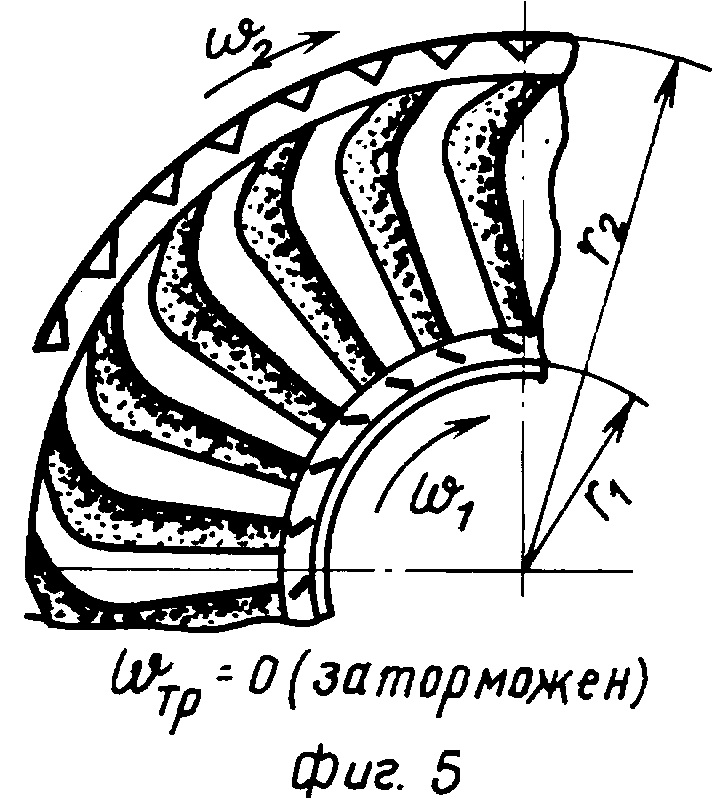
В этом случае жидкость, находящаяся в гидротрансформаторе одновременно взаимодействует (при вращении внутреннего цилиндра разумеется) с одинаковыми площадями (см. фиг. 5), а не с разными (как в случае 1), поэтому коэффициент передачи в этом случае исчисляется также как в простой планетарной системе (таблица 1, случай 3) k =r2/r1. Для случая r2 = 2 • r1, k = 2. Вывод: для разных форм лопаток гидротрансформатора, коэффициент передачи считается по разному.
Итак, мы убедились, что у гидропривода для случая замкнутого масляного объема и заторможенного гидротрансформатора коэффициент передачи - величина постоянная, не равная 1 как в гидросцеплении и системно ее можно сделать какой угодно, ну скажем, равную 4 или 2, и т.д.
Теперь рассмотрим случай, когда ωтр ≠ 0.
Случай 3.
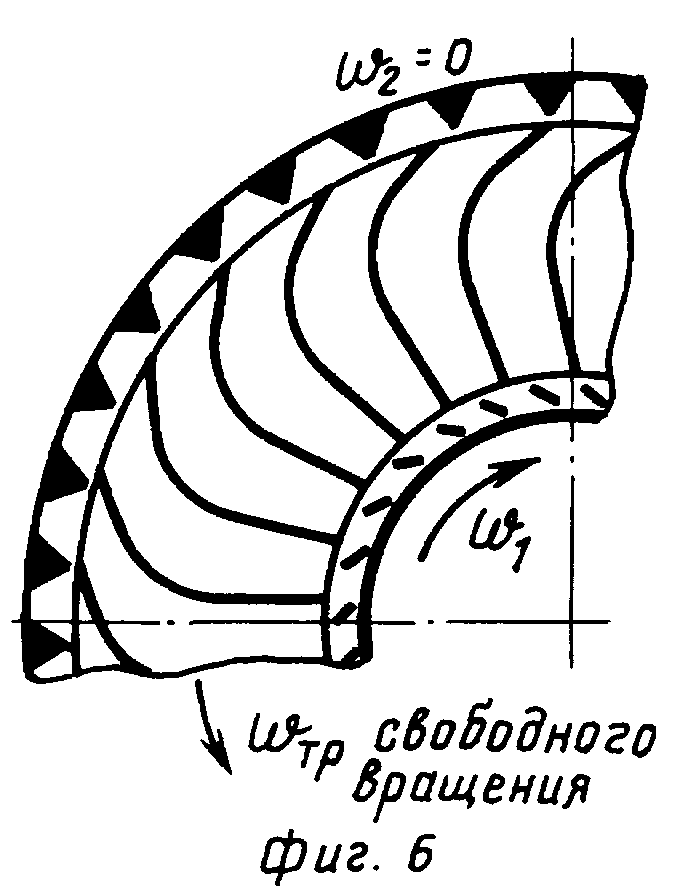
Когда гидротрансформатор не заторможен, передачи вращения с первичного (внутреннего) цилиндра на внешний не происходит (это ясно, так как здесь аналогия с солнечным механизмом для случая с незаторможенным водилом - водило начинает вращаться). Гидротрансформатор начинает вращаться в сторону, противоположную стороне разворота лопаток гидротрансформатора с угловой скоростью ω свободного вращения, под действием сил, возникающих в момент изменения направления жидкости при ее движении по лопаткам гидротрансформатора (см. фиг. 6). Усредненная точка приложения этих сил находится в районе "колена" лопатки гидротрансформатора, соответственно момент разгоняющих гидротрансформатор сил считается из этих условий:
Mразг = ∑ F1...n•rсред.колена,
где rсредн.колена - расстояние от центра до усредненной точки приложения сил ∑ F1...n. Количественно этот момент сил невелик, так как на радиусе изгиба колена сложение сил происходит векторное, да и, если надо этот момент еще уменьшить, то можно расстояние rсредн.колена (расстояние от центра вращения гидротрансформатора до центра приложения ∑ F1...n сил) уменьшить, приблизив к центру вращения начало изгиба колена. Оптимальное r средн.колена ≈ 2/3 r.
То есть, если надо начать движение вторичного цилиндра, нам достаточно к вращающемуся валу гидротрансформатора применить тормозящее усилие, сравнимое по величине с Mразг., но направленное в противоположную сторону. Если "мягко" прикладывать тормозящее усилие и регулировать величину его от 0 до Mразг., начинается "мягкий" разгон вторичного цилиндра, ω2 меняется от 0 до значения ω1/4 для фиг. 6, и ω2 меняется от 0 до значения ω1/2 для фиг. 5 для разных конструкций гидротрансформатора с разными скоростями. Для простоты мы всегда будем рассматривать случай r2 = 2 • r1. Мягкость разгона обеспечивается мягкостью торможения и проскальзыванием. Если исключить проскальзывание за счет "жесткой воды" (поднять давление масла), то мягкость разгона вторичного цилиндра будет обусловлена только мягкостью торможения гидротрансформатора, а от потерь на проскальзывание (как в системе гидросцепления) уже можно в принципе отказаться, следовательно подняв давление в системе гидропривода, мы получаем передачу вращения с первичного цилиндра на вторичный с высоким КПД (без потерь на проскальзывание), с возможностью "мягкого" управления началом и концом вращения вторичного цилиндра и с понижающим коэффициентом передачи вращения (4 или 2) в зависимости от конструкции гидротрансформатора.
Случай 4.
Случай принудительного вращения гидротрансформатора в сторону, противоположную направлению свободного вращения незаторможенного гидротрансформатора. Для рассмотрения этого случая удобнее всего рассматривать конструкцию гидротрансформатора с клиновидными лопатками (случай 2). Взаимодействие первичного цилиндра с вторичным происходит на длине окружности вторичного цилиндра (взаимодействие, конечно, происходит не на длинах окружностей, а на площадях, равных произведению длин окружностей на длины цилиндров. Упрощение мы делаем потому, что в данных конструкциях "цилиндра в цилиндре" их длины примерно равны), равной l2 = (n-l)/d, где n - количество лопаток гидротрансформатора, a d - расстояние между ними (см. фиг. 3). В этом случае конструктивно l1 ≈ l2, следовательно, пока внутренний цилиндр сделает один оборот, наружный (r2 = 2 • r1) сделает пол-оборота. Если при этих условиях гидротрансформатор мы заставим принудительно вращаться со скоростью ω1/2, то за это же время взаимодействие внутреннего и наружного цилиндра будет происходить по всей длине окружности внутреннего цилиндра и наружного цилиндра, и следовательно, одновременно по одному обороту сделает и внутренний и наружный цилиндр. То есть в этом случае коэффициент передачи будет равен 1.
Картина будет такая: с одинаковой угловой скоростью вращается внутренний и наружный цилиндры, при условии, что цилиндр гидротрансформатора вращается принудительно в ту же сторону с угловой скоростью ωтр = ω1/2. Естественно, что если принудительная угловая скорость вращения гидротрансформатора ωтр.принудит. будет меньше ω1/2, но больше 0, коэффициент передачи будет больше 1, но меньше 2. То есть, затормаживая свободное вращение гидротрансформатора (см. случай 3) и впоследствии принудительно вращая его (см. случай 4) ωтр.принудит.= -ωтр.своб.вращ.÷+ω1/2, мы можем плавно менять коэффициент передачи от ∞ до 1. В момент, когда ωтр.принудит.= 0, коэффициент передачи для r2= 2 • r1 для клиновидных лопаток гидротрансформатора равен 2. Для r2 = 2 • r1 и конструкции гидротрансформатора с плоскими лопатками коэффициент передачи также меняется от ∞ до 1, разница лишь в том, что когда ωтр.принудит.= 0, коэффициент передачи для плоских лопаток равен 4, то есть крутизна характеристики роста коэффициента передачи для плоских лопаток выше, чем для клиновых (см. фиг. 9). Все это можно было долго не объяснять, а лишь вспомнить игру в теннис: вы бьете ракеткой по летящему к Вам мячу, стараясь изменить направление его полета на 90o. Направление полета мяча меняется, а скорость его полета становится равной векторной сумме скоростей мяча и ракетки во время удара.
Конструкция гидропривода без возможности изменения коэффициента передачи (см. фиг. 7). Замкнутый масляный объем создает вторичный цилиндр 4 правая часть которого соединяется с хвостовиком кардана, а левая скользит по валу гидротрансформатора через подшипник 6 скольжения. Внутренний диаметр втулки гидротрансформатора 1 через подшипник скольжения сидит на первичном вале 3. Для случая "мокрой воды" (отсутствия начального давления в системе) оба вала достаточно оборудовать сальными прокладками (аналог прокладок гидросцепления), и масло из системы не будет утекать.
Конструкция гидропривода с возможностью управления коэффициентом передачи (см. фиг. 8).
Как уже говорилось выше, в случае 2** для управления коэффициентом передачи необходимо не жесткое крепление фланца втулки гидропривода к корпусу, а принудительное управление скоростью вращения основного гидротрансформатора (фиг. 8 поз. 2) во всем ее диапазоне от ωтр до +ωтр , то есть от торможения свободного вращения основного гидротрансформатора 2, вращающегося в сторону, противоположную вращению первичного вала 5, до принудительного вращения основного гидротрансформатора в сторону вращения первичного вала.
Попробуем инженерно реализовать эту функцию, не изменяя правую часть фиг. 7 - силовую часть, а в левую (управляющую) часть ввести устройство, позволяющее управляющим поступательным перемещением "влево - вправо" осуществлять функцию управления угловой скоростью вращения основного гидротрансформатора (см. фиг. 8).
Правая часть фиг. 8 повторяет полностью фиг. 7, за исключением того, что гидротрансформатор "плавно" переходит в левой части во вторичный цилиндр 4, превращаясь из гидротрансформатора в правой части в гидротурбину в левой части, а внутренняя часть вторичного цилиндра 4 в левой части рисунка лопастей не имеет (гладкая поверхность). Гидротурбиной вторичный цилиндр является только в левой части рисунка. Появилось две новые детали: 9 - дополнительный первичный цилиндр (дополнительный гидронасос). Его конструкция слегка отлична от основного первичного цилиндра тем, что лопасти на нем чередуются с гладкой поверхностью, 10 - дополнительный гидротрансформатор. Отличие дополнительного гидротрансформатора (поз. 10 на фиг. 8) от гидротрансформатора (поз. 2 на фиг. 7) в том, что у него конструктивно предусмотрена функция поступательного перемещения вдоль центральной оси влево-вправо через втулку гидротрансформатора 1, которая в этом случае жестко закреплена к корпусу и не имеет возможности вращения вокруг своей оси, посредством штоков 11. Гидротрансформатор (поз. 10 фиг. 8) так же как и гидротрансформатор (поз. 2 фиг. 7) не вращается, а имеет лишь поступательное движение вдоль оси вращения влево-вправо. Основной гидротрансформатор (поз. 2 фиг. 8) отличается от гидротрансформатора (поз. 2 фиг. 7) тем, что у него предусмотрено:
1. Возможность поступательного перемещения вдоль оси вращения;
2. Свободное и принудительное вращение в обе стороны.
Дополнительный гидротрансформатор 10 на фиг. 8 также сделан секционно как и дополнительный первичный цилиндр: область, которая соответствует гладкой поверхности первичного цилиндра, жидкость через себя не пропускает.
Таким образом, при перемещении влево или вправо дополнительного гидротрансформатора на расстояние h мы полностью перекроем каналы выхода возмущенной лопатками дополнительного цилиндра масляной среды, тем самым исключив торможение основного гидротрансформатора (фиг. 8 поз. 2), который, в свою очередь, перестанет вращать вторичный цилиндр (фиг. 8 поз. 4). Эта ситуация соответствует нейтральной передаче.
Продолжая поступательное перемещение дополнительного гидротрансформатора либо в ту же сторону, либо обратно, мы уменьшаем перекрытие, и часть возмущенной лопатками дополнительного первичного цилиндра жидкости через поворотные каналы дополнительного гидротрансформатора попадает на лопатки основного гидротрансформатора (который в области П выполняет функцию вторичного цилиндра), тем самым создавая торможение собственному вращению основного гидротрансформатора, остановку его при определенных значениях h и вращении его в сторону, противоположную собственному вращению, для h > hостановки под действием разности сил, приложенных к нему двумя разными потоками: регулируемым потоком с дополнительного гидротрансформатора и силой, возникающей в основном гидротрансформаторе при развороте потока от основного первичного цилиндра (фиг. 8 поз. 5).
Итак, конструкция гидропривода на фиг. 8 предусматривает управление коэффициентом передачи, управление началом и концом движения (нейтральная передача) в одном направлении вращения вала вторичного цилиндра. Теперь необходима конструкция, обеспечивающая вышеперечисленные функции в обоих направлениях вращения вторичного вала: прямом и обратном (движение назад) без изменения направления вращения первичного вала. Для решения этого вопроса предлагается конструкция секционного типа. На фиг. 8 направление вращения вала вторичного цилиндра определяется направлением разворота колена в основном гидротрансформаторе. Понятно, в какую сторону бьет "струя", туда и вращается турбина, поэтому предлагается основной гидротрансформатор делать не цельной конструкцией с поворотом колена лопасти в одну сторону, а секционно, то есть по очереди ставить левую и правую секции, чередуя их друг за другом и соединяя в один пакет.
Одновременно, конструкцию основного первичного цилиндра (фиг. 8 поз. 5) также надо изменить и выполнить его конструктивно похожим на дополнительный первичный цилиндр, то есть лопатки основного первичного цилиндра будут чередоваться с гладкой цилиндрической поверхностью. Если теперь изменить тип посадки основного первичного цилиндра на вал (фиг.4 поз. 14), то есть жесткое крепление цилиндра к валу заменить на крепление, дающее возможность двигаться основному цилиндру по валу влево-вправо, то, переместив основной первичный цилиндр в крайнее левое положение, возмущенная жидкость будет проходить только через левые секции (правые окажутся невозмущенными).
Таким образом, вал вторичного цилиндра будет вращаться влево, обеспечив тем самым движение назад, и соответственно, крайнее правое положение основного первичного цилиндра обеспечит вращение вала вторичного цилиндра вправо, таким образом обеспечив движение вперед. Для того, чтобы сохранить управляемость движением и вперед и назад, конструктивно придется изменить и дополнительный гидротрансформатор (фиг. 8 поз. 10). Он у нас и так практически секционный, то есть правая секция чередуется с пустой секцией (гладкой поверхностью). Теперь же заменим "пустую секцию" на левую секцию, так как поступательное движение влево-вправо на дополнительном гидротрансформаторе уже предусмотрено в конструкции на фиг. 8, то замена пустой секции на левую дает возможность управлять скоростью вращения основного гидротрансформатора (фиг. 8 поз. 2) в двух направлениях прямом и обратном, обеспечив таким образом управляемое движение в прямом и обратном направлении, при соответствующих комбинациях относительных расположений элементов. Кстати, для удобства управления может быть окажется удобнее перемещать по валу влево-вправо не основной цилиндр относительно основного гидротрансформатора, а наоборот, основной гидротрансформатор относительно основного цилиндра, так как вторая точка опоры основного гидротрансформатора соприкасается с втулкой гидротрансформатора (фиг. 8 поз. 1), следовательно, будет достаточно удобно пропустить через втулку еще пару штоков для управления перемещением основного гидротрансформатора.
Таким образом, через втулку будут проходить две пары штоков управления: первая пара, как показано на фиг. 8 поз. 1, управляет дополнительным гидротрансформатором (поз. 10), перемещая его влево-вправо, а вторая пара штоков (она не показана на фиг. 4, но будет находиться перпендикулярно плоскости) управляет основным гидротрансформатором, перемещая его влево-вправо (у этой пары рабочими положениями являются только два крайних положения, так как эти штоки обеспечивают движение либо вперед, либо назад). Каждая пара штоков своими левыми торцами соединена со своим шаговым двигателем (их два).
Один шаговый двигатель электрически управляет изменением коэффициента передачи, началом и концом движения в зависимости от относительного расположения дополнительного первичного цилиндра и дополнительного гидротрансформатора, другой шаговый двигатель управляет движением вперед-назад в зависимости от взаимного расположения первичного цилиндра и основного гидротрансформатора. Крепятся оба шаговика так же как и втулка к корпусу оболочки. Корпус оболочки в свою очередь жестко крепится к блоку двигателя, имеет отверстие для входа через сальник первичного вала и выхода через сальник вала вторичного цилиндра. Выполняет функцию защиты вторичного цилиндра и функцию сбора выдавленного из области повышенного давления масла через штоки втулки гидротрансформатора и через кольца подшипников скольжения. Для возврата выдавленного масла в рабочую зону целесообразно рядом с шаговыми электродвигателями разместить масляный насос и через втулку гидротрансформатора и редукционный клапан закачивать выдавленное масло обратно в рабочую зону. Крепится насос на корпусе оболочки, приводится в действие через шестерню от первичного вала.
Таким образом, внутри корпуса-оболочки надо разместить три обслуживающих устройства: два шаговых двигателя и масляный насос, что тоже является непростой инженерной задачей.
Итак, мы рассмотрели возможность создания электрически управляемого устройства, способного управлять движением автомобиля вперед, назад, изменением коэффициента передачи, началом и концом движения вперед и назад, выполнять эти функции мягко, плавно и без фрикционных элементов, без зубчатых зацеплений. Соприкосновение вращающихся деталей происходит только в подшипниковых узлах (точках опоры), а основное взаимодействие деталей происходит в области лопаток через "жесткую" масляную среду (среду под давлением). Поэтому износ основного узла определяется износом подшипников, масляного насоса и шаговых двигателей.
Так как управление этого узла электрическое, то при соответствующем заказе можно сделать дополнительную функцию - радиоуправление. Например, при поступлении соответствующего кода по радиоэфиру движение автомобиля можно прекратить. Или, например, при поступлении соответствующего сигнала по радиоэфиру можно уменьшить скорость движения автомобиля, то есть в местах ограничения скорости движения принудительно изменять скорость проезжающих автомобилей, оборудованных этим типом АКП. Необходимость наличия такой конструкции более чем очевидна. Стоимость такой конструкции в серийном производстве может оказаться примерно в 5 раз дешевле существующих конструкций АКП, выполняющих те же функции, что и эта, за исключением одной - радиоуправление. Новая конструкция в дополнение к простоте, надежности и дешевизне, еще и радиоуправляема, а следовательно - перспективна.
Исходя из вышесказанного предлагается назвать ее - гидродинамическая бесступенчатая коробка передач.
| название | год | авторы | номер документа |
|---|---|---|---|
| Трансмиссия транспортного средства | 1982 |
|
SU1169524A3 |
| СПОСОБ РАБОТЫ ТРАНСМИССИИ АВТОМОБИЛЯ | 2016 |
|
RU2620034C1 |
| Гидромеханическая передача | 2018 |
|
RU2695477C1 |
| Гидромеханическая трансмиссия транспортного средства | 1975 |
|
SU598783A1 |
| Гидротрансформатор | 2018 |
|
RU2682694C1 |
| Бесступенчатая трансмиссия | 1991 |
|
SU1772006A1 |
| БЕССТУПЕНЧАТАЯ ТРАНСМИССИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2340473C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ И СПОСОБ УПРАВЛЕНИЯ РЕМЕННОЙ БЕССТУПЕНЧАТОЙ ТРАНСМИССИЕЙ | 2009 |
|
RU2483235C1 |
| Диапазонная с ручным управлением гидромеханическая передача транспортного средства | 1988 |
|
SU1650983A1 |
| ГИДРОМЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 1995 |
|
RU2086427C1 |
Изобретение относится к области автомобилестроения, машиностроения и может быть использовано в трансмиссиях как переднеприводных, так и заднеприводных легковых автомобилей, а также других транспортных средств. Гидродинамическая бесступенчатая коробка передач содержит первичный и вторичный валы, расположенные соосно и соединенные соответственно с маховиком двигателя и карданным валом, гидродинамический преобразователь крутящего момента, расположенный в корпусе, жестко соединенном с блоком цилиндров двигателя, в замкнутом объеме циркуляции гидродинамического преобразователя крутящего момента расположены первичный цилиндр насоса и дополнительный цилиндр насоса, жестко посаженные на первичный вал, реакторный цилиндр дополнительного гидротрансформатора, расположенный вокруг дополнительного первичного цилиндра насоса один в другом, реакторный цилиндр основного гидротрансформатора, расположенный вокруг первичного цилиндра насоса и вокруг реакторного цилиндра дополнительного гидротрансформатора, турбина вторичного цилиндра, жестко соединенная с вторичным валом, образующая замкнутое цилиндрическое пространство вокруг основного гидротрансформатора, дополнительного гидротрансформатора, первичного цилиндра насоса и дополнительного первичного цилиндра насоса, при этом основной и дополнительный гидротрансформаторы выполнены с соответствующими штоками управления. Техническим результатом является простота изготовления, так как не требует высокой точности при изготовлении сопрягаемых деталей, более долговечен в эксплуатации, а также высокий КПД. 10 з.п.ф-лы, 1 табл., 22 ил.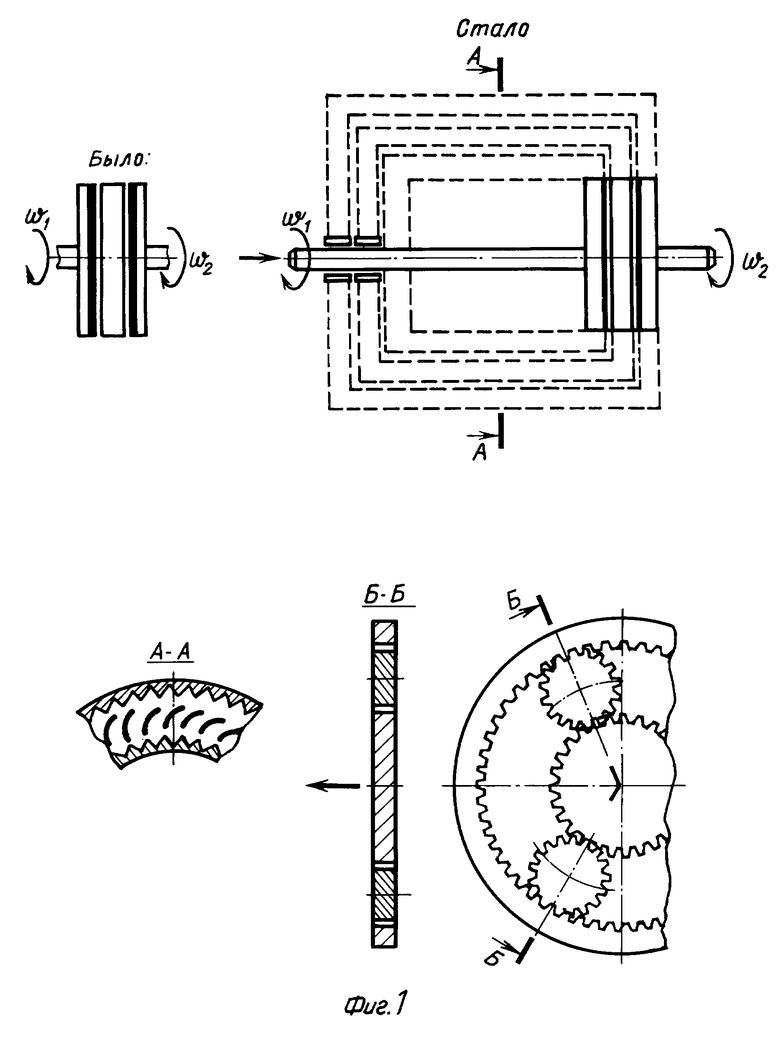
| GB 999475, 28.08.1965 | |||
| US 3939936, 24.02.1976 | |||
| Способ изготовления биметаллических металлкерамических подшипников скольжения | 1976 |
|
SU626853A1 |
| СЦЕПНОЙ УЗЕЛ СЕЛЬСКОХОЗЯЙСТВЕННОГО ОРУДИЯ | 2013 |
|
RU2535262C2 |
| Способ приготовления люминофорной суспензии | 1984 |
|
SU1208588A1 |
| DE 1220223, 30.06.1966 | |||
| Устройство для определения медианы | 1985 |
|
SU1292010A1 |
| DЕ 3741746 А1, 16.06.1988 | |||
| DЕ 3841818 А1, 29.06.1989 | |||
| DЕ 19512996, 10.10.1996 | |||
| УСТРОЙСТВО До1Я ИЗМЕРЕНИЯ РАЗНОСТИ ФАЗ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ | 0 |
|
SU333487A1 |
| РЕДУКТОР ТРАНСМИССИИ ТРАКТОРА | 1992 |
|
RU2023599C1 |
| АВТОМАТИЧЕСКАЯ КОРОБКА ПЕРЕДАЧ ФМВ | 1993 |
|
RU2061600C1 |
