Изобретение относится к приборостроению и может быть использовано для одновременного измерения двух разностей давлений, например, в уровнемерах, основанных на гидростатическом методе измерения уровня жидкости.
Известна система измерения уровня "SMART TANK HTG" фирмы Fisher-Rosemount, основанная на гидростатическом методе. Система содержит три датчика давления, установленных на нижнем, промежуточном и верхнем уровнях резервуара. Разность давления между показаниями датчиков, установленных на нижнем и промежуточном уровнях, позволяет измерить плотность жидкости, а разность давления между показаниями датчиков, установленных на нижнем и верхнем уровнях, и данные по плотности жидкости позволяют вычислить уровень жидкости в резервуаре ("Гидростатическая система измерения уровня в резервуарах "SMART TANK", фирма Fisher-Rosemount, брошюра BRH N 1050, 1993 г.).
Недостатком системы являются ее сложность и высокая стоимость, связанные с использованием трех раздельных датчиков. Кроме этого, система имеет дополнительную погрешность измерения при наличии в резервуаре избыточного давления. Погрешность объясняется тем, что каждый из датчиков давления измеряет сумму гидростатического и избыточного давлений жидкости. При этом точность определения гидростатического давления уменьшается пропорционально увеличению избыточного давления.
Следует отметить, что существует вариант построения функционально аналогичной системы с использованием двух датчиков разности давления, погрешность измерения уровня которой не зависит от избыточного давления. Однако эта система также является относительно сложной, поскольку содержит два датчика.
Наиболее близким по технической сущности является емкостный датчик давления и разности давлений, содержащий корпус, размещенные в корпусе измерительную и силовую мембраны, плоскости которых расположены под углом в пределах от 70o до 110o, причем центральная часть силовой мембраны смещена относительно плоскости измерительной мембраны, элемент передачи силы, соединенный с центральными частями силовой и измерительной мембран, емкостный преобразователь деформации, связанный с измерительной мембраной (Патент России RU 2126533, 20.02.99, кл. G 01 L 09/12).
Недостатком датчика является невозможность использования для измерения дополнительной разности давлений.
Кроме этого, гидростатический уровнемер (система гидростатического измерения уровня), построенный с использованием двух таких датчиков, будет иметь дополнительную погрешность, т.к. датчики, учитывая их раздельное изготовление и градуировку, не могут иметь полностью одинаковые характеристики и одинаковую чувствительность к внешним воздействиям, например к температуре.
Техническим результатом изобретения является обеспечение возможности одновременного измерения двух разностей давлений с использованием единого упругого элемента, единого преобразователя деформации и связанные с этим упрощение конструкции и снижение относительной стоимости датчика.
Технический результат достигается за счет того, что датчик разности давлений, содержащий корпус, размещенные в корпусе измерительную и силовую мембраны, плоскости которых расположены под углом в пределах от 70o до 110oC, а центральная часть силовой мембраны смещена относительно плоскости измерительной мембраны, элемент передачи силы, соединенный с центральными частями силовой и измерительной мембран, преобразователь деформации, связанный с измерительной мембраной, дополнен второй силовой мембраной, плоскость которой расположена под углом в пределах от 70o до 110o к плоскости первой силовой мембраны и под углом в пределах от 70o до 110o к плоскости измерительной мембраны, причем центральная часть второй силовой мембраны смещена относительно плоскости измерительной мембраны и соединена с элементом передачи силы.
Технический результат достигается в случае использования одного из следующих вариантов преобразователя деформации.
Первый вариант основан на использовании емкостного метода измерения деформации мембраны. В этом варианте преобразователь деформации содержит подвижные и неподвижные электроды. Подвижные электроды связаны с поверхностью измерительной мембраны, а центры по меньшей мере двух электродов находятся не на одной прямой, пересекающей центральную часть мембраны. Неподвижные электроды расположены на введенной диэлектрической подложке с зазором относительно подвижных электродов. При этом подвижные электроды и соответствующие им противолежащие неподвижные электроды образуют конденсаторы, емкости которых характеризуют значения измеряемых параметров.
Деформацию участков мембраны несложно измерить с использованием тензорезисторов. Преобразователь деформации в этом случае содержит по меньшей мере два тензорезистора, которые связаны с поверхностью измерительной мембраны, причем центры по меньшей мере двух тензорезисторов находятся не на одной прямой, пересекающей центральную часть мембраны. Сопротивления тензорезисторов характеризуют значения измеряемых параметров.
В следующем варианте преобразователь деформации выполнен на основе пьезорезистивных элементов. Этот преобразователь содержит по меньшей мере два пьезорезистивных элемента, которые связаны с поверхностью измерительной мембраны, при этом центры по меньшей мере двух элементов находятся не на одной прямой, пересекающей центральную часть мембраны. Электрические сигналы с выходов элементов характеризуют значения измеряемых параметров.
В основном варианте датчика наружная и внутренняя поверхности измерительной мембраны расположены в полостях, которые соединены между собой. В случае, если полость с наружной стороны измерительной мембраны отделена от полости, расположенной с внутренней стороны измерительной мембраны, и вакуумизирована или соединена с атмосферой, то предлагаемый датчик дополнительно может использоваться для измерения абсолютного или избыточного давления. В этом случае преобразователь деформации должен содержать по меньшей мере три чувствительных элемента, центры которых расположены по разные стороны от центра мембраны. В качестве чувствительных элементов могут быть использованы подвижные и неподвижные электроды емкостного преобразователя, тензорезисторы или пьезорезистивные элементы.
Вариант датчика разности давлений с емкостным преобразователем деформации показан на чертеже.
В предложенном датчике измерение двух разностей давленй реализовано с использованием единой упругой измерительной мембраны, деформируемой в двух координатах. Первая разность давлений посредством первой силовой мембраны и элемента передачи силы воздействует на измерительную мембрану в виде момента силы. Вектор момента силы приложен к точке, расположенной в области соединения элемента передачи силы и измерительной мембраны, в направлении вдоль плоскости измерительной мембраны и параллельно плоскости первой силовой мембраны. Вторая разность давлений посредством второй силовой мембраны и элемента передачи силы воздействует на измерительную мембрану в виде второго момента силы, вектор которого приложен к этой же точке в направлении вдоль плоскости измерительной мембраны и параллельно второй силовой мембране. Моменты силы приложены практически к одной и той же точке. Поэтому их можно заменить суммарным моментом. Вектор этого момента, в зависимости от соотношения величин измеряемых разностей давлений и их знаков, может менять направление в плоскости измерительной мембраны в пределах от 0o до 360o. Деформация мембраны при этом выражается в виде смещения участков мембраны, расположенных по одну сторону от оси вектора в направлении ее наружной стороны, и смещения участков в противоположном направлении по другую сторону от оси. Причем величина деформации какого-либо участка мембраны пропорциональна величине суммарного момента силы. Если допустить, что мембрана выполнена в виде фигуры вращения, то деформация участков мембраны, выраженная в виде смещения или кривизны поверхности на рассматриваемых участках, для участков, расположенных на одинаковом расстоянии от центра мембраны, равна
δ1= K•M•sin(ϕ1-ϕм);
δ2= K•M•sin(ϕ2-ϕм), (1)
δ1 и δ2 - величина деформации первого и второго участка мембраны соответственно;
К - коэффициент пропорциональности;
М - величина суммарного момента силы;
ϕм - направление вектора момента силы;
ϕ1 и ϕ2 - угол полярной координаты первого и второго участка мембраны соответственно.
Если два участка мембраны не расположены на прямой, пересекающей центр мембраны, т. е. угол между участками не равен 0 или 180o, то по величине деформации на этих участках можно определить суммарный момент силы и его направление. Для нахождения вектора можно воспользоваться формулами, полученными путем решения системы уравнений (1) для двух рассматриваемых участков. На основе суммарного вектора момента силы несложно найти его исходные составляющие по осям, параллельным силовым мембранам.
Объем вычислений для нахождения исходных составляющих суммарного вектора существенно меньше, если участки расположены на прямых, проходящих через центр измерительной мембраны и перпендикулярных силовым мембранам. Поскольку исходные составляющие суммарного вектора непосредственно связаны с величинами разностей давлений, то
δ1cp= β1•(P1-P3); (2)
δ2cp= β2•(P2-P3), (3)
где δ1cp - среднее значение смещения участка поверхности измерительной мембраны, расположенного на прямой, перпендикулярной плоскости первой силовой мембраны;
δ2cp - среднее значение смещения второго участка поверхности измерительной мембраны, расположенного на прямой, перпендикулярной плоскости второй силовой мембраны:
P1-P3 - разность давлений, воздействующих на первую силовую мембрану:
P2-P3 - разность давлений, воздействующих на вторую силовую мембрану;
β1,β2 - коэффициенты пропорциональности.
Деформация участков мембраны может быть измерена с использованием емкостного преобразователя, который содержит два подвижных и два неподвижных электрода, образующих соответственно два конденсатора первой и второй измерительных частей преобразователя. Подвижные электроды расположены непосредственно на поверхности или на тонкой диэлектрической пленке, связанной с поверхностью измерительной мембраны, при этом центры электродов находятся не на одной прямой, пересекающей центральную часть мембраны. Для варианта расположения электродов с центрами на прямых, перпендикулярных плоскостям силовых мембран, формулы для вычисления измеряемых параметров выглядят следующим образом: (4)
(4) (5)
(5)
где α1,0,0= X/β1; α2,0,0= X/β2; α1,1,0= -ε0•ε1•S1/β1; α2,1,0= -ε0•ε1•S2/β2;
C1 и C2 - емкости конденсаторов первой и второй измерительных частей преобразователя соответственно;
C1п и C2п - пассивные составляющие емкостей конденсаторов первой и второй измерительных частей соответственно; эти составляющие, в частности, учитывают емкости соединительных проводов;
X - величина зазора между подвижными и неподвижными электродами:
S1 и S2 - площади подвижных электродов конденсаторов первой и второй измерительных частей соответственно;
ε0 - диэлектрическая проницаемость вакуума;
ε1 - относительная диэлектрическая проницаемость среды между электродами.
Приведенные формулы (4) и (5) справедливы для относительно небольших величин деформаций частей мембраны
δ1cp/X ≪ 1 и δ1cp/r ≪ 1,
где r - радиус мембраны.
При строгом анализе зависимостей деформаций участков мембраны от измеряемых параметров и анализе зависимостей изменений емкостей электродов преобразователя от величин деформаций необходимо учитывать дополнительное влияние измеряемых параметров друг на друга, обусловленное изменением формы мембраны и формы электродов преобразователя. Расчеты показывают, что в случае воздействия на мембрану первой разности давлений, вызывающей деформацию подвижного электрода второй измерительной части емкостного преобразователя в виде изгиба поверхности с выдавливанием одного из краев электрода и утоплением другого на величину, составляющую 10% от величины зазора между подвижным и неподвижным электродами, "нулевая" точка величины второй разности давлений, определенной в соответствии с (5), смещается приблизительно на 1%.
В то же время приведенные в правых частях формул (4) и (5) составляющие являются доминирующими. Следовательно, взаимные зависимости могут быть скомпенсированы путем добавления в эти формулы дополнительных членов, имеющих больший порядок малости. При этом правые части формул (4) и (5) могут быть заменены полиномами

где m1, m2 - степени полиномов;
α1,i,j, α2,i,j - коэффициенты полиномов.
Изложение метода нахождения коэффициентов полиномов приведено в описании примера реализации датчика.
Необходимо отметить, что выражения в виде полиномов (6) и (7) являются универсальными. Путем подбора коэффициентов полиномов можно аппроксимировать зависимости измеряемых параметров от емкостей конденсаторов измерительных частей для вариантов преобразователя, в которых центры электродов не расположены на прямых, перпендикулярных плоскостям силовых мембран. Для аппроксимации этих зависимостей также могут быть использованы другие математические выражения, например кусочно-линейные функции.
Преобразователь деформации может быть выполнен с использованием других типов чувствительных элементов, например тензорезисторов. В этом случае измеряемые параметры аналогичным образом можно выразить через параметры по меньшей мере двух чувствительных элементов.
Следовательно, для реализации измерения двух разностей давлений достаточно использования единого упругого элемента - измерительной мембраны.
Для измерения используются также единый преобразователь деформации и общие элементы электронной схемы. Поэтому стоимость датчика в расчете на измерение одной разности давлений будет ниже, чем при использовании двух отдельных датчиков.
Дополнительный положительный результат изобретения заключается в повышении точности измерения в случае, когда выходной результат определен в виде отношения (P1-P3)/(P2-P3).
Повышение точности объясняется следующим.
В предлагаемом датчике измерение двух разностей давлений реализовано с использованием единых измерительной мембраны и преобразователя деформации. Поэтому характеристики измерительных каналов преобразователя имеют одинаковую чувствительность к внешним воздействиям. Под влиянием внешних воздействий выходной сигнал отдельно взятого измерительного канала будет изменяться. Однако сигнал другого канала будет изменяться в той же степени. В результате величина отношения этих сигналов остается постоянной.
Это можно проиллюстрировать на примере компенсации погрешности, обусловленной изменением жесткости измерительной мембраны под воздействием температуры. Величина жесткости измерительной мембраны непосредственно связана с величинами коэффициентов β1 и β2. Анализ формул (4) и (5) показывает, что пропорциональное изменение этих коэффициентов не отражается на величине отношения (P1-P3)/(P2-P3).
Датчик с емкостным преобразователем деформации (см. чертеж) содержит корпус 1, первую 2 и вторую 3 силовые мембраны, элемент передачи силы 4, измерительную мембрану 5, выполненную за одно целое с опорным основанием, емкостный преобразователь деформации, образованный подвижными электродами 6 и 7, расположенными на поверхности с наружной стороны измерительной мембраны 5, и неподвижными электродами 8 и 9, расположенными на диэлектрической подложке 10. Силовая мембрана 2 выполнена с жесткой центральной и гибкой периферийной частями. Вторая силовая мембрана 3 имеет такую же конструкцию. Измерительная мембрана 5 и силовые мембраны закреплены в корпусе 1 таким образом, что их плоскости расположены под прямыми углами, а центры силовых мембран смещены относительно плоскости измерительной мембраны 2. При этом первая и вторая силовые мембраны разделяют внутреннюю полость корпуса на три камеры - камеру 11 для приема первого измеряемого давления P1 камеру 12 для приема второго давления P2 и среднюю камеру 13 для приема третьего давления P3. Расположенные на стенках корпуса отверстия 14, 15 и 16 предназначены для подачи в камеры датчика измеряемых давлений, например, с помощью импульсных линий давлений. Элемент 4 передачи силы выполнен в виде конструкции, образованной двумя дугами, имеющими общую часть. Жесткость и геометрия дуг выбраны с условием обеспечения минимального радиального напряжения в силовых мембранах при их взаимном перемещении. Общая часть элемента 4 передачи силы закреплена в центральной части измерительной мембраны 5 с внутренней ее стороны, а свободные концы дуг закреплены в центральных частях первой и второй силовых мембран. Подвижные электроды 6 и 7 емкостного преобразователя расположены непосредственно на поверхности на наружной стороне измерительной мембраны 5. Они выполнены в виде сегментов кольца, центральные оси которых проходят через центр мембраны, и перпендикулярны плоскостям соответствующих силовых мембран. Диэлектрическая подложка 10 выполнена в виде цилиндра с выточкой для электродов 8 и 9 и закреплена периферийной частью на основании измерительной мембраны 5. Между обращенными друг на друга соответствующими электродами имеется зазор. Полость между измерительной мембраной 5 и диэлектрической подложкой 10 соединена со средней камерой 13. Измерительная мембрана 5 и диэлектрическая подложка 10 выполнены из диэлектрического материала, например из кварца.
Электроды 6 и 8 образуют конденсатор первой измерительной части, а электроды 7 и 9 - конденсатор второй измерительной части. Выводы конденсаторов предназначены для подключения к входам каналов двухканального электронного блока аналого-цифрового преобразователя, который соединен с электронным вычислительным блоком. На чертеже электронные блоки не приведены, а выводы электродов конденсаторов показаны условно с обозначениями соответствующих емкостей C1 и C2.
Датчик разности давлений работает следующим образом.
Внутренние камеры датчика заполнены средой, например разделительной жидкостью, имеющей давление P1 в камере 11, давление P2 в камере 12 и давление P3 в средней камере 13. Под действием разности давлений P1 и P3 на первую силовую мембрану 2 действует распределенная сила, суммарный вектор которой направлен перпендикулярно плоскости силовой мембраны 2 в сторону средней камеры 13. Эта сила компенсируется противодействием со стороны элемента 4 передачи силы и, частично, упругостью силовой мембраны 2. Поскольку конец элемента 4 передачи силы закреплен в средней части измерительной мембраны 5, а плоскость измерительной мембраны 5 смещена относительно центра силовой мембраны 2 и перпендикулярна плоскости этой мембраны 2, то сила, воздействующая на элемент 4 со стороны силовой мембраны 2, вызывает момент силы, вектор которого приложен к точке в области соединения измерительной мембраны и элемента передачи силы и направлен вдоль плоскости измерительной мембраны 5 и параллельно первой силовой мембране 2. Упругость силовой мембраны 2 выбрана минимальной, при этом противодействующая на мембрану 2 сила формируется в основном со стороны элемента 4 передачи силы, что уменьшает влияние изменений упругости силовой мембраны 2 на характеристики датчика. Разность давлений P2 и P3 посредством второй силовой мембраны 3 и элемента передачи силы 4 воздействует на измерительную мембрану 5 также в виде момента силы. Обусловленный этой разностью вектор момента силы приложен практически к той же точке, что и момент силы, обусловленный первой разностью давлений, и направлен вдоль плоскости измерительной мембраны 5 перпендикулярно первому вектору момента силы. Два момента силы могут быть заменены эквивалентным суммарным моментом. Суммарный момент определяет деформацию измерительной мембраны.
Деформация мембраны 5 вызывает перемещения расположенных на поверхности мембраны 5 подвижных электродов 6 и 7. При этом увеличение первой разности давлений P1 и P3 связано с уменьшением емкости C1 конденсатора первой измерительной части, а увеличение разности давлений P2 и P3 вызывает уменьшение емкости C2 конденсатора второй измерительной части.
Как было показано, существуют функциональные зависимости между измеряемыми параметрами и значениями емкостей C1 и C2 конденсаторов, выражающие каждый из измеряемых параметров в отдельности. Поскольку центры подвижных электродов 6 и 7 расположены на осях, перпендикулярных плоскостям силовых мембран, то для вычисления измеряемых параметров можно воспользоваться полиномами (6) и (7).
Коэффициенты полиномов рассчитывают следующим образом.
Во время заводской градуировки датчика запоминают массив измеренных значений емкостей конденсаторов измерительных частей датчика при различных комбинациях входных параметров - разностей давлений. Значения разностей давлений также запоминают. Количество точек градуировки зависит от степеней полинома. Для одного из параметров, например для первой разности давлений, составляют систему уравнений
 (8)
(8)
где P1,1 - P3,1 - значение образцовой величины разности давления для соответствующей точки градуировки характеристики датчика под номером 1, принадлежащей массиву измерений в пределах 1...n;
C1,1 - измеренное значение емкости C1 конденсатора первой измерительной части в точке градуировки под номером 1;
C2,1 - измеренное значение емкости C2 конденсатора второй измерительной части в точке градуировки под номером 1.
Величины C1п и C2п могут быть определены расчетным путем или прямыми измерениями и в дальнейшем используются как константы.
Решая эту систему, находят коэффициенты полинома. Методы решения и критерии выбора точек градуировки датчика для улучшения обусловленности системы известны.
Аналогичным образом находят коэффициенты полинома для расчета второго параметра - второй разности давления. Далее эти коэффициенты записывают в ПЗУ электронного вычислительного блока датчика.
В процессе измерения электронный вычислительный блок осуществляет вычисление значений этих полиномов.
Таким образом, выходными результатами вычислительного блока являются измеряемые параметры в отдельности.
Датчик предлагается использовать в приложениях, где целесообразно одновременное измерение двух разностей давлений или (и) отношений разностей давлений.
Одно из таких приложений - измерение уровня и массы жидкости гидростатическим способом. Измерение уровня может быть осуществлено с использованием трех выносных разделительных мембран, соединенных с камерами датчика капиллярными трубками. При этом две мембраны устанавливают в верхней и нижней частях резервуара. Третью мембрану дополнительно устанавливают на средней по высоте отметке резервуара.
В случае использования стандартного датчика разности давления измерение уровня и массы осуществляют следующим образом. На основе результата измерения разности давлений в нижней и верхней частях резервуара и данных о плотности вычисляют уровень. Используя данные об уровне и геометрии резервуара, определяют объем. На основе объема и плотности вычисляют массу.
Если резервуар имеет постоянное горизонтальное сечение, плотность жидкости не влияет на результат вычисления массы. Однако, если резервуар имеет геометрию в виде шара или в виде горизонтально расположенного цилиндра, а плотность жидкости измерена с большой погрешностью или задана в виде граничных значений, то результаты измерения массы и уровня будут неточными. При этом, для исключения перелива жидкости необходимо оставлять большой запас по уровню или использовать дополнительный уровнемер.
Анализ показывает, что погрешность определения уровня возрастает с его увеличением с нарастающей скоростью. Это связано с увеличением высоты столба жидкости и с тем, что площадь сечения резервуара сначала увеличивается, а затем уменьшается. Следовательно, гидростатический уровнемер, построенный с использованием одного датчика разности давления, имеет максимальную погрешность измерения, когда уровень жидкости находится выше средней отметки резервуара.
С использованием изобретения погрешность измерения верхнего уровня можно существенно уменьшить за счет введенной дополнительной точки отбора давления, расположенной на средней отметке резервуара. В этом случае уровень жидкости находят относительно средней отметки резервуара по показанию разности давления в верхней точке и на средней отметке. Это позволяет уменьшить погрешность измерения верхнего уровня более чем в два раза. Кроме этого, с введением дополнительной точки отбора давления появляется возможность непосредственного измерения плотности жидкости, поскольку на основе показаний датчика известен вес столба жидкости, расположенного между средней и нижней отметками резервуара. Измеренную плотность жидкости можно использовать для расчета уровня. В результате этого погрешности измерения верхнего уровня и массы жидкости будут еще меньше.
Поскольку величина нижнего уровня и начальная масса жидкости до начала заполнения резервуара могут быть измерены достаточно точно, то использование изобретения позволить измерить массу жидкости при ее наливе в резервуар практически без погрешности, обусловленной неточными данными о ее плотности. При этом дополнительно гарантируется заполнение резервуара без перелива или недолива.
Второй пример применения датчика разности давлений - в системе управления горелкой котлоагрегата. С использованием датчика может быть осуществлен контроль объема подачи газа в горелку и контроль соотношения газ - воздух. Для измерения этих параметров камеру 11 датчика (см. чертеж) подключают к трубопроводу воздуха горелки, камеру 12 - к трубопроводу газа, а среднюю камеру 12 соединяют с атмосферой.
Датчик разности давлений по исполнениям преобразователя деформации, измерительной мембраны, силовых мембран, конструкции элемента передачи силы и корпуса имеет множество вариантов. Ниже приведены наиболее характерные из них.
В примере реализации датчика разности давлений для измерения деформации мембраны использован емкостный преобразователь. Такой тип преобразователя не является единственным вариантом.
Под действием момента силы деформация мембраны выражена в виде выдавливания одних участков поверхности мембраны и утопления других. При этом величина деформации на этих участках характеризуется кривизной или величиной сжатия - растяжения поверхности мембраны. В свою очередь, кривизну или сжатие - растяжение поверхности несложно измерить с использованием тензорезисторов. Тензорезисторный преобразователь должен содержать по меньшей мере два тензорезистора, связанных с поверхностью измерительной мембраны, при этом центры по меньшей мере двух тензорезисторов не должны находиться на одной прямой, пересекающей центр мембраны.
Для измерения деформации участков мембраны также можно применить пьезорезистивные или резонансно-частотные чувствительные элементы. Центры чувствительности этих элементов также не должны находиться на одной прямой, проходящей через центр мембраны.
Существует вариант датчика, в котором полость с наружной стороны измерительной мембраны отделена от полости с внутренней стороны мембраны, т.е. от средней камеры датчика, и соединена с атмосферой или вакуумирована. В этом случае избыточное давление в средней камере датчика вызывает ее деформацию в виде выдавливания мембраны в направлении наружной или внутренней ее стороны. Эту деформацию можно измерить и, в дополнение к измерению двух разностей давлений, определить величину избыточного или абсолютного давления в средней камере датчика. В дальнейшем в тексте будет упоминаться только вариант датчика с измерением избыточного давления.
Минимальная система чувствительных элементов преобразователя деформации, которая позволяет реализовать измерение двух разностей давлений и, дополнено, избыточного давления, а также обеспечить компенсацию их взаимного влияния, состоит из трех элементов, центры чувствительности которых расположены по разные стороны относительно центра измерительной мембраны. Например, может быть использован емкостный преобразователь, подвижные электроды которого выполнены в виде трех одинаковых сегментов кольца, расположенных симметрично вокруг центра измерительной мембраны.
Как было показано, наличие двух чувствительных элементов с центрами, расположенными не на одной прямой, проходящей через центр мембраны, позволяет определить координаты вектора момента силы. Система из уравнений (1) для двух участков в этом случае имеет решение. В случае дополнительной деформации мембраны, связанной с избыточным давлением, в правые части уравнений (1) для рассматриваемых участков необходимо добавить составляющие, связанные с величиной избыточного давления. Полученная система уравнений имеет решение, если ее дополнить еще одним уравнением для третьего участка. При этом система уравнений будет лучше обусловлена, если каждый из участков расположить на противоположной относительно центра и двух других участков стороне мембраны. Следовательно, центры чувствительных элементов должны быть расположены по разные стороны относительно центра мембраны.
Математические выражения для вычисления измеряемых параметров существенно проще, если преобразователь деформации снабдить четырьмя чувствительными элементами, центры которых расположены симметрично относительно центра мембраны на прямых, проходящих через центр мембраны и перпендикулярных силовым мембранам.
Элементы преобразователя, расположенные по разные стороны от центра мембраны, обладают по отношению к воздействию момента силы разнонаправленной чувствительностью. В связи с этим для определения величин разностей давлений необходимо использовать разности параметров противоположно расположенных элементов. В случае воздействия на измерительную мембрану избыточного давления участки мембран смещаются в одном направлении, например в направлении наружной ее стороны. При этом параметры чувствительных элементов также изменяются с одинаковыми знаками. Следовательно, величину избыточного давления можно выразить через сумму параметров. Поскольку для определения величин разностей давлений используются разности параметров чувствительных элементов, а для определения избыточного давления - их суммы, то влияние избыточного давления на результаты измерений разностей давлений и влияние разностей давлений на результат измерения избыточного давления в значительной степени скомпенсированы.
Измерение параметров чувствительных элементов может быть реализовано с использованием мостовых схем. В этом случае преобразователь деформации должен содержать дополнительные элементы. Например, существует вариант тензорезисторного преобразователя деформации, который содержит четыре элемента, образующих мостовую схему для измерения первой разности давлений, четыре элемента, входящих в схему измерения второй разности давлений, и четыре элемента для измерения избыточного давления.
Необходимо отметить, что в последних двух описанных вариантах преобразователя деформации центры по меньшей мере трех чувствительных элементов также расположены по разные стороны относительно центра мембраны.
Анализ конструкции датчика разности давлений показывает, что в результате неточной сборки датчика, температурных напряжений в мембранах и корпусе датчика, а также других факторов, на измерительную мембрану через элемент передачи силы действует сила, вектор которой перпендикулярен плоскости измерительной мембраны. Деформация измерительной мембраны, связанная с этой силой, аналогична деформации от воздействия избыточного давления. Поэтому влияние на выходные результаты нормальной составляющей силы может быть устранено при градуировке датчика.
В случае, если плоскости силовых мембран не строго перпендикулярны друг другу, существует дополнительная взаимная зависимость измеряемых параметров, обусловленная передачей силы с одной силовой мембраны на другую через элемент передачи силы. Однако эта зависимость является детерминированной и также устраняется по результатам градуировки датчика.
Поскольку рассмотренные силы не приводят к нарушению работоспособности датчика, плоскость измерительной мембраны по отношению к плоскостям силовых мембран и плоскости силовых мембран по отношению друг к другу при необходимости могут быть расположены под углами, отличающимися от 90o, например под углами в пределах от 70o до 110o.
Взаимное влияние силовых мембран, обусловленное передачей силы через элемент передачи силы, можно уменьшить за счет использования специального профиля элемента передачи силы. С этой целью дугообразные части элемента 4 передачи силы, показанные на чертеже, предлагается выполнить в виде Г-образных частей, имеющих сечения в виде овала или прямоугольника. Причем в частях элемента передачи силы, связанных с центрами силовых мембран, широкая часть профиля должна быть ориентирована параллельно плоскости измерительной мембраны, а в частях, находящихся вблизи соединения с измерительной мембраной, - перпендикулярно плоскостям соответствующих силовых мембран. Анализ показывает, что в случае передачи полезной составляющей силы жесткость такой конструкции определяется жесткостью профиля при его деформации в направлении широкой стороны, а жесткость при передаче силы между мембранами - в направлении узкой стороны. Поэтому взаимное влияние силовых мембран через элемент передачи силы будет уменьшено.
Существует вариант выполнения элемента передачи силы в виде трех цилиндров, соединенных между собой под прямыми углами. При этом свободный конец первого цилиндра предназначен для соединения с центром измерительной мембраны, а свободные концы двух других - с центрами силовых мембран. Второй и третий цилиндры имеют сужения диаметров на участках вблизи их концов. Уменьшение взаимного влияния силовых мембран обусловлено тем, что цилиндры на этих участках имеют повышенную гибкость.
С целью обеспечения изоляции измерительной мембраны от внешней среды датчик предлагается дополнить разделительной мембраной, расположенной таким образом, что мембрана разделяет среднюю камеру датчика на две камеры, одна из которых охватывает внутренние поверхности измерительной и силовых мембран, элемент передачи силы и заполнена диэлектрической жидкостью, а вторая предназначена для приема внешней среды. Для полной изоляции силовых мембран датчик предлагается снабдить еще двумя разделительными мембранами, отделяющими внешние поверхности силовых мембран от внешней среды.
На чертеже показан корпус 1 датчика в упрощенном виде. С целью обеспечения удобства сборки корпус датчика должен быть разборным. Разделение камер датчика можно осуществить с использованием фланцевых элементов, ориентированных параллельно плоскостям силовых мембран и закрепленных непосредственно на корпусе датчика. Эти же фланцевые элементы должны содержать отверстия для подключения импульсных линий давления. С той же целью измерительная мембрана, преобразователь деформации и часть элемента передачи силы могут быть выполнены в виде единого измерительного модуля, имеющего свой отдельный корпус. Несмотря на то, что крепление измерительной мембраны к корпусу датчика в этом случае осуществляется посредством корпуса измерительного модуля, положение и ориентация этой мембраны относительно силовых мембран должны соответствовать приведенным признакам изобретения.
Изобретение относится к приборостроению и может быть использовано в уровнемерах, основанных на гидростатическом методе измерения уровня жидкости. Датчик, содержащий корпус, размещенные в корпусе измерительную и силовую мембраны, плоскости которых расположены под углом в пределах 70 - 110°, а центральная часть силовой мембраны смещена относительно плоскости измерительной мембраны, элемент передачи силы, соединенный с центральными частями силовой и измерительной мембран, преобразователь деформации, связанный с измерительной мембраной, снабжен второй силовой мембраной, плоскость которой расположена под углом в пределах 70 - 110° к плоскости первой силовой мембраны и под углом в пределах 70 - 110° к плоскости измерительной мембраны, причем центральная часть второй силовой мембраны смещена относительно плоскости измерительной мембраны и соединена с элементом передачи силы. Преобразователь деформации может быть выполнен емкостным, тензорезисторным или пьезорезистивным. Полость над измерительной мембраной может быть вакуумирована или соединена с атмосферой, такое выполнение датчика обеспечивает возможность одновременного измерения двух разностей давлений с использованием единого упругого элемента. 4 з.п.ф-лы, 1 ил.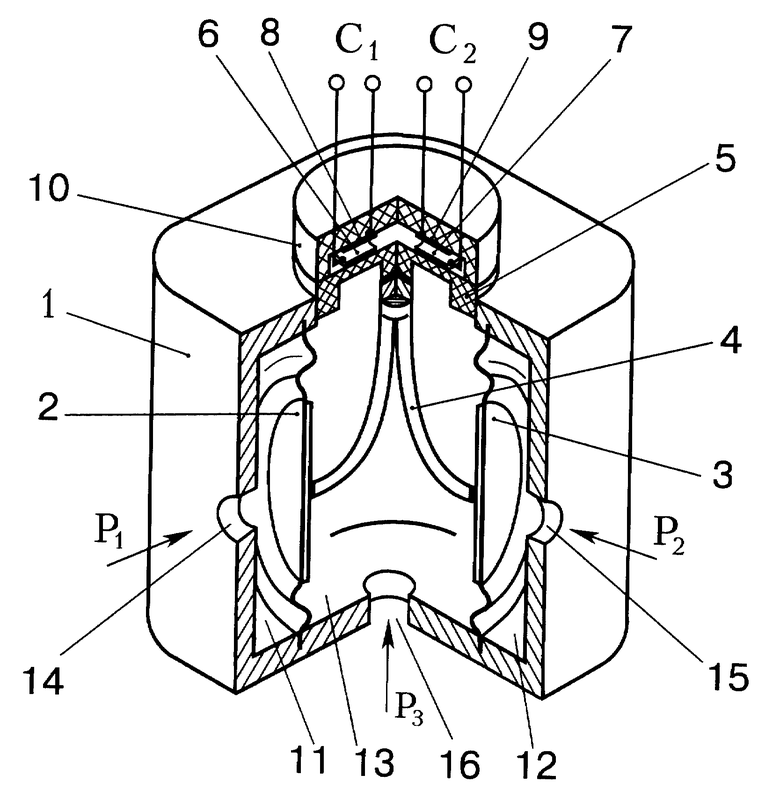
| ЕМКОСТНЫЙ ДАТЧИК ДАВЛЕНИЯ И РАЗНОСТИ ДАВЛЕНИЙ | 1997 |
|
RU2126533C1 |
| Гидростатическая система измерения уровня в резервуарах SMART TANK | |||
| Фирма Fisher Rosemount | |||
| РЕЛЕ | 1924 |
|
SU1050A1 |
| Способ изготовления фанеры-переклейки | 1921 |
|
SU1993A1 |
