Изобретение относится к приборостроению и может быть использовано для одновременного измерения двух параметров, давления и разности давлений, например, в расходомерах перепада давления.
Известен многопараметрический массовый расходомер модели 3095MV фирмы FISHER-ROSEMOUNT. Расходомер содержит расположенные в одном модуле сенсора емкостный датчик разности давлений и пьезорезистивный датчик статического давления (Многопараметрический массовый расходомер Multivariable модели 3095MV. Фирма FISHER-ROSEMOUNT. Лист технических данных PDS 4716AOO. Русский, 1996 г.).
Недостатком многопараметрического расходомера является сложность конструкции, связанная с наличием двух раздельных датчиков. Кроме этого, измерительная электронная схема расходомера имеет раздельные и разнородные измерительные электрические цепи, предназначенные для считывания информации с датчиков, что усложняет электронный блок расходомера.
Известен емкостный датчик давления, содержащий мембрану, выполненную за одно целое с опорным основанием, круглый электрод, размещенный в центре мембраны, и закрепленный с зазором на опорном основании ответный электрод (Патент США N 4562742, C1, кл. G 01 L 09/12, 27.08.86 г.).
Недостатком емкостного датчика является невозможность измерения дополнительного параметра - разности давлений. Для измерения разности давлений необходим дополнительный датчик, что усложняет конструкцию расходомера перепада давления.
Известен емкостный датчик разности давлений, содержащий корпус с приемными штуцерами, размещенную в корпусе мембрану со штоком, связанную с тонкостенной разделительной втулкой, консольно закрепленной в корпусе, емкостный преобразователь с подвижными и неподвижными электродами и расположенный в полости разделительной втулки стержень, один конец которого прикреплен к ее торцу, а на другом его конце закреплен подвижный электрод (Патент России N 2010198 A, кл. G 01 L 09/12, 30.03.94 г.). Данный емкостный датчик выбран в качестве прототипа.
Недостатком емкостного датчика является невозможность измерения дополнительного параметра - давления.
Кроме этого, емкостный датчик имеет высокую температурную погрешность, обусловленную пространственным разделением упругих элементов и элементов емкостного преобразователя. Характеристики каждого из этих элементов изменяются под воздействием температуры. При этом, в случае наличия градиента температуры в корпусе датчика, температурный дрейф характеристик элементов будет различен и не может быть скорректирован путем измерения температуры датчика только в одной точке. Коррекция температурной погрешности с измерением температуры датчика в нескольких точках существенно усложняет конструкцию датчика.
Техническим результатом изобретения является обеспечение возможности одновременного измерения двух параметров - давления и разности давлений - с использованием единого упругого элемента, единых измерительных цепей электронной схемы и единой схемы термокоррекции характеристик датчика и связанные с этим упрощение конструкции и снижение относительной стоимости датчика.
Технический результат достигается тем, что емкостный датчик давления и разности давлений, содержащий корпус, размещенные в корпусе силовую мембрану, элемент передачи силы, закрепленный в средней части силовой мембраны, емкостный преобразователь с подвижными и неподвижными электродами, расположенными соответственно друг против друга с зазором, снабжен закрепленной в корпусе измерительной мембраной, плоскость которой расположена под углом в пределах от 70 до 110o к плоскости силовой мембраны и смещена относительно центральной части силовой мембраны, причем средняя часть измерительной мембраны соединена с элементом передачи силы, а подвижные электроды, расположенные по разные стороны от оси, проходящей через среднюю часть измерительной мембраны и параллельно плоскости силовой мембраны, с соответствующими неподвижными электродами образуют два конденсатора первой и второй измерительных частей емкостного преобразователя, емкости которых характеризуют значения измеряемых параметров.
Технический результат достигается также за счет использования следующих особенностей емкостного датчика давления и разности давлений.
Технический результат достигается за счет того, что в нем подвижные и неподвижные электроды первой и второй измерительных частей емкостного преобразователя выполнены в виде не связанных между собой геометрических фигур, нанесенных путем металлизации на введенных диэлектрических подложках, причем подложка с подвижными электродами выполнена в виде диэлектрической пленки, закрепленной свободной от электродов стороной на поверхности измерительной мембраны.
В другом варианте измерительная мембрана выполнена из диэлектрического материала, а подвижные и неподвижные электроды первой и второй измерительных частей емкостного преобразователя выполнены в виде не связанных между собой геометрических фигур, нанесенных путем металлизации соответственно на измерительную мембрану и введенную диэлектрическую подложку.
При этом подвижные и неподвижные электроды первой и второй измерительных частей емкостного преобразователя имеют форму эллипсов.
Технический результат достигается также за счет того, что подвижные электроды первой и второй измерительных частей объединены в общий электрод, который образован поверхностью измерительной мембраны, изготовленной из металла, а неподвижные электроды первой и второй измерительных частей выполнены в виде не связанных между собой геометрических фигур и образуют относительно общего электрода два конденсатора, емкости которых характеризуют значения измеряемых параметров.
В следующем варианте датчика неподвижные электроды первой и второй измерительных частей объединены в общий электрод, а подвижные электроды первой и второй измерительных частей выполнены в виде не связанных между собой геометрических фигур и образуют относительно общего электрода два конденсатора, емкости которых характеризуют значения измеряемых параметров.
Емкостный датчик давления и разности давлений имеет варианты, позволяющие получить дополнительные технические результаты.
В одном из вариантов емкостного давления и разности давлений измерительная мембрана изготовлена за одно целое с опорным основанием, причем опорное основание мембраны образовано по меньшей мере двумя толстостенными цилиндрами, которые соединены между собой тонкостенным цилиндром, при этом один из толстостенных цилиндров закреплен в корпусе датчика, а другой охватывает измерительную часть мембраны.
Технический результат варианта заключается в повышении точности измерений за счет уменьшения влияния на результаты измерений механических напряжений и градиента температуры в корпусе датчика.
В следующем варианте емкостный датчик давления и разности давлений дополнен второй силовой мембраной, закрепленной в корпусе зеркально-симметричным образом относительно первой силовой мембраны, причем элемент передачи силы дополнительно присоединен к средней части второй силовой мембраны, а герметичная полость между мембранами заполнена диэлектрической жидкостью и охватывает измерительную мембрану с ее внутренней стороны.
Имеется вариант, в котором емкостный датчик давления и разности давлений дополнен двумя разделительными мембранами, расположенными по разные стороны от силовой мембраны и образующими две герметичные полости, причем одна из образованных этими мембранами полостей в корпусе датчика охватывает элемент передачи силы и измерительную мембрану с ее внутренней стороны, при этом обе полости заполнены диэлектрической жидкостью.
Положительный технический результат вариантов - обеспечение изоляции измерительной мембраны от измеряемой среды.
Также возможен вариант емкостного датчика давления и разности давлений, в котором корпус датчика выполнен разборным и включает в себя узел мембранного блока, в котором закреплены силовая мембрана, элемент передачи силы, измерительная мембрана и два фланцевых элемента с отверстиями для передачи давлений, причем фланцевые элементы охватывают мембранный блок с двух сторон.
Положительный технический результат варианта выражается в обеспечении удобства сборки и обслуживания датчика, а также в унификации элементов корпуса датчика давления и разности давлений с элементами датчиков, имеющими широкое применение.
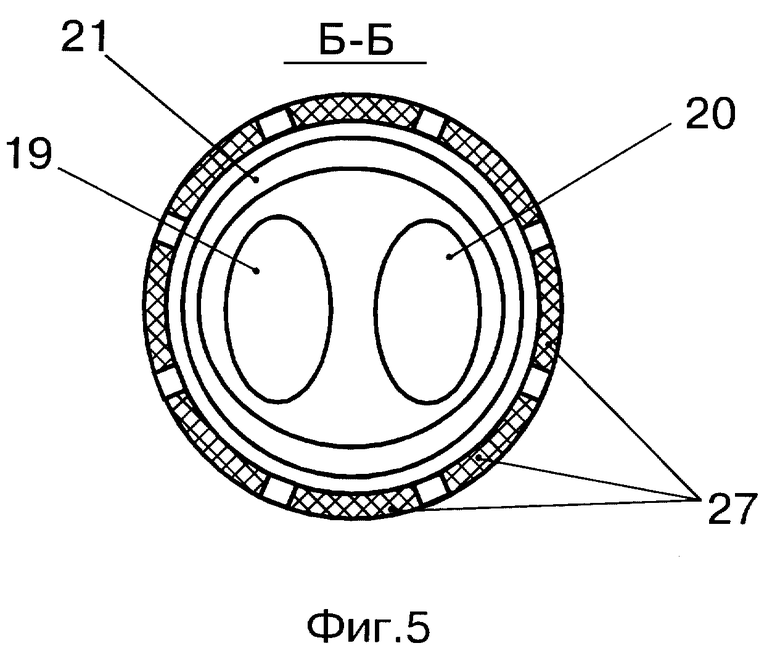
На фиг. 1 показан вариант емкостного датчика давления и разности давлений; на фиг. 2 приведен емкостный преобразователь этого датчика; на фиг.3 показан емкостный преобразователь в разрезе; на фиг.4 приведен вариант емкостного преобразователя; на фиг.5 показан разрез варианта емкостного преобразователя.
В предложенном емкостном датчике давления и разности давлений измерение двух параметров - давления и разности давлений реализовано с использованием единой упругой измерительной мембраны, деформируемой в двух координатах. Давление воздействует на поверхность измерительной мембраны и вызывает деформацию мембраны с векторами перемещения частей мембраны в направлении наружной стороны мембраны. Разность давлений посредством силовой мембраны и элемента передачи силы воздействует на измерительную мембрану в виде момента силы. Деформация измерительной мембраны при этом выражается в виде смещения частей мембраны, расположенных по одну сторону от оси, проходящей в плоскости измерительной мембраны через среднюю ее часть и параллельно плоскости силовой мембраны, в направлении наружной стороны и смещения частей мембраны, расположенных по другую сторону от оси с векторами перемещения в направлении внутренней стороны измерительной мембраны. Указанная ось по существу является осью деформации измерительной мембраны. Таким образом, векторы перемещения в первой части измерительной мембраны, расположенной по одну сторону оси деформации этой мембраны, складываются, а по другую сторону от оси, во второй части, вычитаются. При этом величины смещений участков поверхности измерительной мембраны связаны с измеряемыми параметрами следующими зависимостями:
где δ1cp - среднее значение смещения участка поверхности измерительной мембраны, расположенного в первой части мембраны, относительно его положения в недеформированном состоянии;
δ21cp - среднее значение смещения участка поверхности измерительной мембраны, расположенного во второй части мембраны, относительно его положения в недеформированном состоянии;
P1 - величина давления, воздействующего на поверхность измерительной мембраны;
P1 - P2 - разность давлений, воздействующих на силовую мембрану;
β1,1,β1,2,β2,1,β2,2 - коэффициенты пропорциональности.
В случае, если рассматриваемые участки равны между собой и расположены симметрично относительно оси деформации, а сама измерительная мембрана также симметрична относительно этой оси, то
β1,1= β2,1= β1,β1,2= β2,2= β2. (2)
Решая систему (1) уравнений с учетом (2), несложно определить величины, отображающие измеряемые параметры в отдельности
Емкостный преобразователь перемещения содержит подвижные и неподвижные электроды. Подвижные электроды находятся непосредственно на поверхности или на тонкой диэлектрической пленке, которая закреплена на поверхности мембраны, т. е. связаны с поверхностью измерительной мембраны, а неподвижные электроды расположены на диэлектрической подложке, неподвижно закрепленной в корпусе датчика или на основании измерительной мембраны. Причем электроды, расположенные по разные стороны от оси деформации измерительной мембраны, образуют два конденсатора первой и второй измерительных частей емкостного преобразователя. Емкости конденсаторов связаны с величинами смещений подвижных электродов следующими зависимостями:

где C1 и C2 - емкости конденсаторов соответственно первой и второй измерительных частей емкостного преобразователя;
С1П и С2П - пассивные составляющие емкостей конденсаторов соответственно первой и второй измерительных частей; эти составляющие учитывают, например, емкости соединительных проводов;
К1 и К2 - коэффициенты пропорциональности;
X - величина зазора между электродами при недеформированной измерительной мембране;
δэ1 - среднее значение смещений участков, расположенных в пределах поверхности подвижного электрода первой измерительной части;
δэ2 - среднее значение смещений участков, расположенных в пределах поверхности подвижного электрода второй измерительной части.
Принято допущение, что величина X зазора постоянна.
Поскольку электроды связаны с участками поверхности мембраны, то можно записать равенства δ1cp= δэ1, δ2cp= δэ2. Принимая во внимание (5) и (6), формулы для вычисления измеряемых параметров можно записать следующим образом:
где α1,0,0= X/β1;
α1,1,0= -K1/(2β1);
α1,0,1= -K2/(2β1);
α2,0,0= 0;
α2,1,0= -K1/(2β2);
α2,0,1= K2/(2β2).
Несложно показать, что при отсутствии принятых допущений о симметрии измерительной мембраны, равенстве электродов и постоянстве величины зазора X формулы (7) и (8) будут выглядеть аналогичным образом.
Приведенные формулы (7) и (8) справедливы для относительно небольших величин деформаций частей мембраны δ1э/X ≪ 1 и δ1э/r ≪ 1, где r - радиус мембраны. При более строгом анализе зависимостей деформаций от измеряемых параметров и анализе зависимостей емкостей конденсаторов от величин деформаций необходимо учитывать нелинейные эффекты, обусловленные изменением формы мембраны и формы подвижных электродов. Нелинейные эффекты могут привести к взаимному влиянию друг на друга измеряемых параметров в выходных результатах. Например, более точное выражение для емкости конденсатора первой измерительной части имеет вид
где КС1 - коэффициент пропорциональности;
δ1(x,y) - величина смещения точечного участка подвижного электрода в направлении по нормали к плоскости измерительной мембраны, расположенного с координатами x, y в пределах области S поверхности подвижного электрода первой измерительной части.
Естественно, что упрощенное замещение этого интеграла в (5), а также аналогичного интеграла в (6) и использование формул (7) и (8) для вычисления измеряемых параметров приводит к существенным погрешностям. Расчеты показывают, что в случае воздействия на мембрану момента силы, вызывающего деформацию подвижных электродов в виде сегментов сферы с выдавливанием центров электродов относительно краев на величину, составляющую 25% от величины зазора X, "нулевая" точка давления, определенного в соответствии с (7), смещается в сторону увеличения на 5%.
Приведенные в правых частях формул (7) и (8) составляющие являются доминирующими, а нелинейные эффекты могут быть скомпенсированы путем добавления в эти формулы дополнительных членов, имеющих больший порядок малости. При этом правые части формул (7) и (8) могут быть заменены полиномами

где m1 и m2 - степени полиномов соответственно по давлению и разности давлений;
α1,i,j,α2,i,j- коэффициенты полиномов.
Принципиальная возможность использования предложенных математических выражений (10) и (11) для вычисления измеряемых параметров основана на том, что при любой допустимой комбинации значений измеряемых параметров поверхность измерительной мембраны деформирована единственным образом, также единственна комбинация значений емкостей конденсаторов измерительных частей. При этом для каждого из измеряемых параметров существуют функциональные зависимости от емкостей конденсаторов. Функциональные зависимости в общем случае не имеют точного аналитического выражения, однако могут быть представлены в виде таблиц, являющихся результатом расчетов с использованием математических моделей измерительной мембраны и емкостного преобразователя. Способы построения математических моделей известны. Для аппроксимации табличных данных могут быть использованы различные функции, например полиномы.
Необходимо отметить, что для расчета коэффициентов полиномов нет необходимости использовать точные аналитические выражения рассмотренных функциональных зависимостей. Как показано в описании варианта емкостного датчика давления и разности давлений, коэффициенты полиномов могут быть рассчитаны также на основе данных, полученных в результате градуировки датчика.
Следовательно, для реализации измерения давления и разности давлений достаточно использования единого упругого элемента - измерительной мембраны и двух каналов измерения емкостей.
Ввиду того, что измерительная мембрана и емкостный преобразователь представляют собой интегрированную конструкцию, локализованную в малом объеме, для коррекции температурной погрешности датчика достаточно измерения температуры только в одной точке - вблизи измерительной мембраны, что также упрощает конструкцию датчика.
Дополнительный положительный результат изобретения заключается в повышении точности измерения в случае, когда выходной результат определен в виде отношения (P1 - P2)/P1. Это отношение используется, например, при вычислении расхода газа в расходомерах перепада давления. Повышение точности достигается за счет компенсации погрешности, обусловленной изменением жесткости измерительной мембраны. Изменение жесткости измерительной мембраны выражается в пропорциональном изменении коэффициентов β1,1,β1,2,β2,1,β2,2 (1). Анализ формул (7) и (8) показывает, что пропорциональное изменение этих коэффициентов не влияет на величину отношения (P1 - P2)/P1.
Вариант емкостного датчика давления и разности давлений показан на фиг. 1.
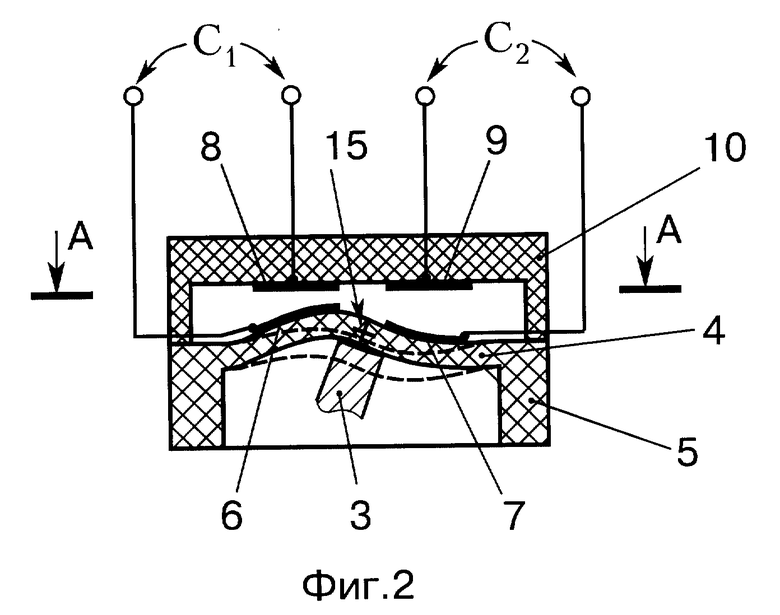
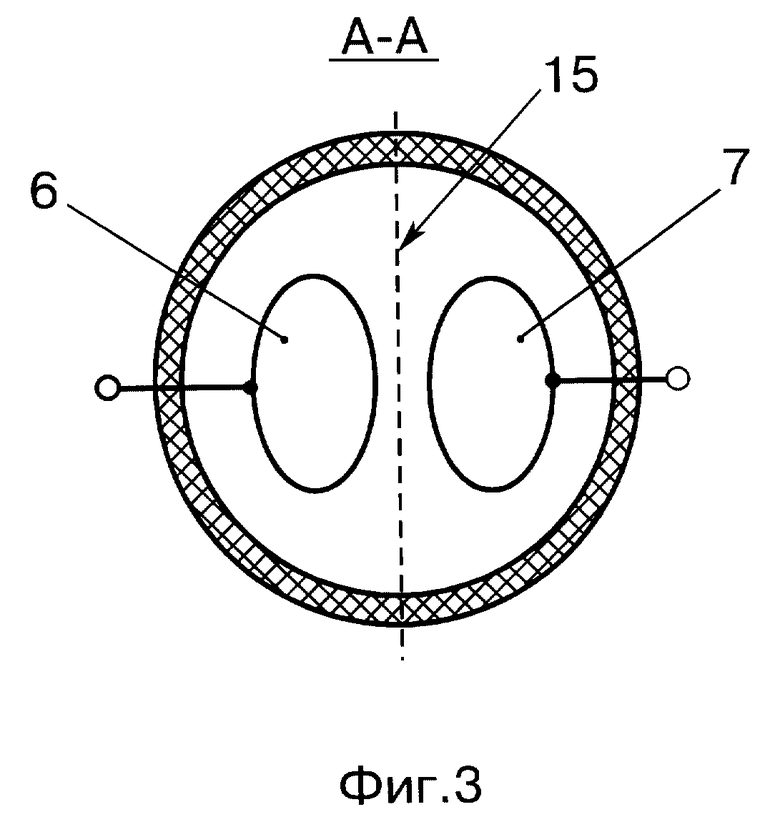
Емкостный датчик давления и разности давлений содержит корпус 1, силовую мембрану 2, элемент передачи силы 3, измерительную мембрану 4, выполненную за одно целое с опорным основанием 5, емкостный преобразователь, образованный подвижными электродами 6 и 7, расположенными на поверхности с наружной стороны измерительной мембраны 4, и неподвижными электродами 8 и 9, расположенными на диэлектрической подложке 10. Силовая мембрана 2 выполнена с жесткой центральной и гибкой периферийной частями. Мембрана 2 закреплена периферийной частью в корпусе 1 таким образом, что разделяет внутреннюю полость корпуса на две камеры - плюсовую камеру 11 для приема первого P1 большего измеряемого давления и минусовую камеру 12 для приема второго P2 меньшего давления. Расположенные на боковых стенках корпуса отверстия 13 и 14 предназначены для подачи в камеры датчика измеряемых давлений, например, с помощью импульсных линий давлений. Измерительная мембрана 4 закреплена за опорное основание 5 в корпусе 1 таким образом, что плоскость измерительной мембраны 4 расположена под углом ϕ = 90o к плоскости силовой мембраны 2 и смещена относительно центральной части силовой мембраны 2 на расстояние L. При этом внутренняя сторона измерительной мембраны 4 обращена в сторону плюсовой камеры 11 и соприкасается со средой в этой камере, а наружная соприкасается с внешней средой или защищена от внешней среды и находится в вакууме. Элемент 3 передачи силы выполнен в виде Г-образной конструкции, имеющей жесткую и гибкую части. На фиг.1 эти части выделены разной толщиной. Свободный конец жесткой части элемента 3 передачи силы закреплен в центральной части измерительной мембраны 4 с внутренней ее стороны, а свободный конец гибкой части этого элемента 3 закреплен в центральной части силовой мембраны 2. Подвижные электроды 6 и 7 емкостного преобразователя расположены непосредственно на поверхности на наружной стороне измерительной мембраны 4 и попарно с соответствующими неподвижными электродами 8 и 9, расположенными на диэлектрической подложке 10, разделены на две измерительные части, расположенные по разные стороны от оси деформации 15, проходящей вдоль плоскости измерительной мембраны 4 через среднюю ее часть и параллельно плоскости силовой мембраны 2. Положение оси 15 на фиг.1 обозначено в виде знака +, а на фиг. 2 пунктирной линией. Подвижный 6 и неподвижный 8 электроды первой измерительной, а также подвижный 7 и неподвижный 9 электроды второй измерительной частей выполнены в виде не связанных между собой геометрических фигур, например, в виде эллипсов фиг.2, нанесенных путем металлизации на поверхности мембраны 4 и подложки 10. Диэлектрическая подложка 10 выполнена в виде цилиндра с выточкой для электродов 8 и 9 и закреплена периферийной частью на основании 5 измерительной мембраны 4 таким образом, что между обращенными друг на друга соответствующими электродами измерительных частей имеется зазор. Измерительная мембрана 4 и диэлектрическая подложка 10 выполнены из диэлектрического материала, например из кварца.
Электроды 6 и 8 образуют конденсатор первой измерительной части, а электроды 7 и 9 образуют конденсатор второй измерительной части. Выводы конденсаторов предназначены для подключения к входам каналов двухканального электронного блока аналого-цифрового преобразователя, цифровые сигналы с выходов которого подаются на входы электронного вычислительного блока. На фигурах электронные блоки не показаны, а выводы электродов конденсаторов приведены условно с обозначениями соответствующих емкостей.
Емкостный датчик давления и разности давлений работает следующим образом.
Внутренние камеры датчика заполнены средой, например природным газом, имеющей давление P1 в плюсовой камере 11 и давление P2 в минусовой камере 12. Под действием разности давлений P1 и P2 на силовую мембрану 2 действует распределенная сила, суммарный вектор которой направлен перпендикулярно плоскости силовой мембраны 2 в сторону минусовой камеры 12. Эта сила компенсируется противодействием со стороны элемента 3 передачи силы и, частично, упругостью силовой мембраны 2. Поскольку жесткий конец элемента 3 передачи силы закреплен в средней части измерительной мембраны 4, а плоскость измерительной мембраны 4 смещена на величину L относительно центра силовой мембраны 2 и перпендикулярна плоскости этой мембраны 2, то сила, воздействующая на элемент 3 со стороны силовой мембраны 2, вызывает вблизи точки соединения измерительной мембраны 4 и элемента 3 момент силы. Нормальная по отношению к плоскости измерительной мембраны 4 составляющая силы, действующей со стороны элемента 3 на измерительную мембрану 4, незначительна, к тому же эта составляющая дополнительно уменьшена за счет гибкого участка элемента 3 передачи силы.
Упругость силовой мембраны 2 выбрана минимальной, при этом противодействующая на мембрану 2 сила формируется в основном со стороны элемента 3 передачи силы, что уменьшает влияние изменений упругости силовой мембраны 2 на характеристики датчика.
Момент силы вызывает деформацию измерительной мембраны 4. Деформация мембраны 4 при этом выражается в виде смещения частей мембраны, расположенных по одну сторону от оси 15 деформации, с векторами перемещения в направлении наружной стороны и смещения частей мембраны 4, расположенных по другую сторону от оси 15, с векторами перемещения в направлении внутренней стороны мембраны 4, как это показано на фиг.2 в виде изгиба наружной и внутренней поверхностей мембраны 4, обозначенных пунктирной линией. Величина деформации мембраны 4 на фиг.2 для большей наглядности увеличена.
Одновременно на измерительную мембрану 4 воздействует распределенная сила, обусловленная давлением среды в плюсовой камере 11. В случае, если наружная поверхность мембраны 4 находится в вакууме, эта сила пропорциональна абсолютному давлению в плюсовой камере 11. Сила вызывает деформацию измерительной мембраны 4 с векторами перемещения частей мембраны в направлении наружной стороны мембраны. Таким образом, векторы перемещения в первой части измерительной мембраны 4, расположенной по одну сторону от оси 15, складываются, а по другую вычитаются. Профиль измерительной мембраны 4, обусловленный давлением среды в плюсовой камере и моментом силы, показан на фиг.2 сплошной линией.
Деформация мембраны 4 вызывает перемещения расположенных на поверхности мембраны 4 подвижных электродов 6 и 7. При этом в случае увеличения давления в плюсовой камере датчика емкости C1 и C2 конденсаторов первой и второй измерительных частей увеличиваются, а при увеличении разности давлений P1 и P2 в плюсовой и минусовой камерах емкость C1 конденсатора первой измерительной части увеличивается, а емкость C2 конденсатора второй измерительной части уменьшается.
Как было показано, существуют функциональные зависимости измеряемых параметров, выраженные через значения емкостей C1 и C2 конденсаторов, отображающие каждый из измеряемых параметров в отдельности. Эти функциональные зависимости могут быть аппроксимированы, например, в виде полиномов или в виде кусочно-линейных функций.
Коэффициенты полиномов могут быть рассчитаны следующим образом.
Во время заводской градуировки датчика запоминают массив измеренных значений емкостей конденсаторов измерительных частей датчика при различных комбинациях входных параметров - давлений и разностей давлений, значения которых также запоминают. Количество точек градуировки зависит от степеней полинома. Для одного из параметров, например давления, составляют систему уравнений
где P1,I - значение образцовой величины давления для соответствующей точки градуировки характеристики датчика под номером I, принадлежащей массиву измерений в пределах 1 ... n;
C1,I - измеренное значение емкости C1 конденсатора первой измерительной части в точке градуировки под номером I;
C2,I - измеренное значение емкости C2 конденсатора второй измерительной части в точке градуировки под номером I.
Величины C1П и C2П могут быть определены расчетным путем или прямыми измерениями и в дальнейшем используются как константы.
Решая эту систему, находят коэффициенты полинома. Методы решения и критерии выбора точек градуировки датчика для улучшения обусловленности системы известны.
Аналогичным образом находят коэффициенты полинома для расчета второго параметра - разности давлений. Далее эти коэффициенты записывают в ПЗУ электронного вычислительного блока датчика.
В процессе измерения вычислительный блок осуществляет вычисление значений этих полиномов.
Таким образом, выходными результатами вычислительного блока являются измеряемые параметры в отдельности.
Емкостный датчик давления и разности давлений характеризуется тем, что измерение двух параметров реализовано с использованием единой измерительной мембраны. Деформация измерительной мембраны обусловлена одновременным действием силы и момента силы и ограничена единым для этих сил пределом. Поэтому верхние пределы измерений давления и разности давлений связаны между собой. Реализация разных соотношений этих пределов может быть осуществлена путем изменения величины смещения L (см. фиг.1), соотношения размеров силовой 2 и измерительной 4 мембран.
Основная область применения емкостного датчика - в расходомерах перепада давления. Дополнительно датчик может использоваться в приложениях, где целесообразно одновременное измерение разности давлений и давления, например, для измерения уровня методом перепада давления и одновременного измерения давления в этом же резервуаре. Не исключен вариант использования датчика для измерения только разности давлений или только давления. Поскольку выходными результатами датчика являются разность давлений и одно из этих давлений, то несложно вычислить значение второго давления. Поэтому выходной результат датчика может быть выражен в виде двух давлений по отдельности. Емкостный датчик также может быть отградуирован для отрицательной ветви характеристики разности давлений.
Емкостный датчик давления и разности давлений по исполнениям емкостного преобразователя, измерительной мембраны, силовой мембраны или блока мембран, конструкции элемента передачи силы и корпуса имеет множество вариантов. Ниже приведены наиболее характерные из них.
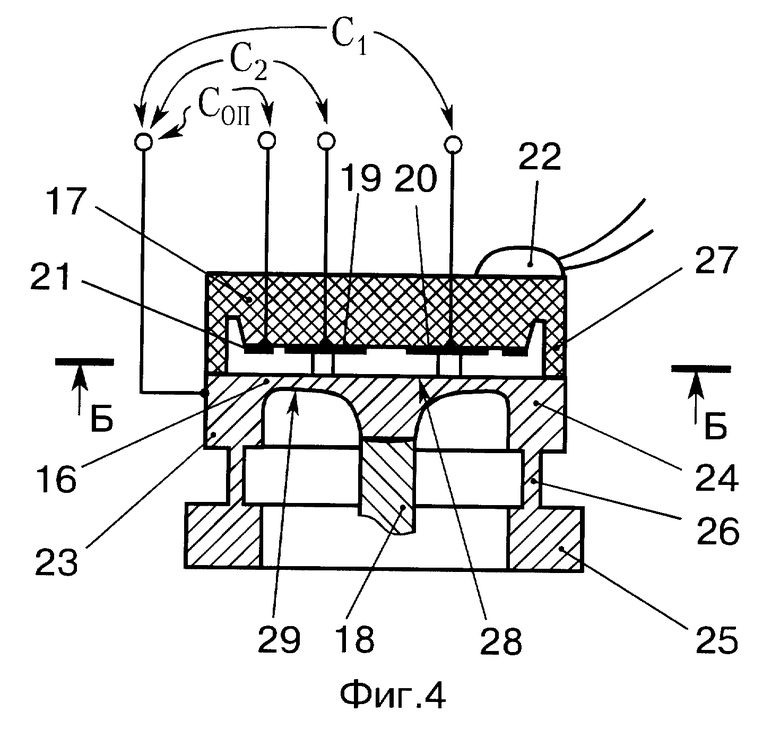
На фиг.4 приведен пример варианта емкостного преобразователя, а на фиг.5 показан его разрез. На фиг.4 и 5 обозначены измерительная мембрана 16, диэлектрическая подложка 17, элемент 18 передачи силы, неподвижные электроды 19 и 20 соответственно первой и второй измерительных частей, опорный неподвижный электрод 21, датчик 22 температуры, основание 23 измерительной мембраны, верхний толстостенный цилиндр 24 основания мембраны, нижний толстостенный цилиндр 25 основания мембраны, промежуточный тонкостенный цилиндр 26 основания измерительной мембраны, сегменты 27 тонкостенного цилиндра основания диэлектрической подложки 17.
Как показано на фиг.3, подвижные электроды первой и второй измерительных частей объединены в общий электрод, в качестве которого использована непосредственно поверхность 28 измерительной мембраны 16, выполненной из металла. В данном случае участки поверхности мембраны выполняют функцию подвижных электродов.
Достоинством такого варианта является упрощение конструкции и повышение точности за счет исключения влияния подвижных электродов на упругие свойства измерительной мембраны и обеспечения высокой стабильности поверхностей электродов. Недостатками варианта являются необходимость изоляции измерительной мембраны от корпуса датчика и измеряемой среды и некоторые ограничения на конструкцию электронного блока аналого-цифрового преобразования, предназначенного для измерения емкостей конденсаторов, образованных электродами, т. к. имеется общая точка соединения выводов этих конденсаторов.
В качестве симметричного варианта описанному выше может быть предложен вариант с объединением в общий электрод неподвижных электродов. Вариант на фигурах не показан.
Возможен вариант, в котором измерительная мембрана выполнена из металла, а электроды первой и второй измерительных частей емкостного преобразователя выполнены в виде не связанных между собой геометрических фигур, нанесенных путем металлизации на введенных диэлектрических подложках, причем подложка с подвижными электродами выполнена в виде диэлектрической пленки, закрепленной свободной от электродов стороной на поверхности измерительной мембраны. Вариант на фигурах не показан.
Таким образом, подвижные электроды или образованный этими электродами общий электрод могут быть связаны с поверхностью измерительной мембраны путем закрепления электродов на поверхности измерительной мембраны (см. фиг. 1), или путем использования в качестве электродов непосредственно поверхности измерительной мембраны (см. фиг.2), или посредством тонкой диэлектрической пленки.
Для уменьшения мультипликативной составляющей погрешности, обусловленной, например, температурными изменениями геометрических размеров диэлектрической подложки с неподвижными электродами или характеристик каналов электронного блока аналого-цифрового преобразования, может быть использован вариант емкостного преобразователя с опорными электродами, образованными неподвижными электродами, расположенными на диэлектрической подложке, и противолежащими электродами, расположенными на частях поверхности мембраны, или образованными частями поверхности измерительной мембраны, выполненной в этом случае из металла, средняя величина смещений которых меньше зависит от измеряемого параметра, чем величины смещений частей мембраны с подвижными электродами измерительных частей.
Следует отметить, что эти погрешности могут быть в значительной степени устранены за счет измерения температуры емкостного преобразователя, однако всегда предпочтительнее иметь преобразователь с более высокой стабильностью без применения температурной коррекции.
Вариант емкостного преобразователя показан на фиг.4 и 5.
Особенностью варианта емкостного преобразователя датчика является то, что для коррекции погрешности измерения разности давлений в качестве опорных электродов могут использоваться измерительные электроды 19 и 20 в сумме, а для коррекции погрешности измерения давления - отдельные опорные электроды, а именно электрод 21, расположенный на периферийных частях поверхности диэлектрической подложки 17 и соответствующий противолежащий электрод в виде поверхности 28 мембраны 16. Емкости C1, C2 и CОП электродов 19, 20 измерительных частей и опорного электрода 21 в данном случае, как показано на фиг.4, образованы относительно поверхности 28 мембраны 16, являющейся общим электродом.
Для вычисления выходных результатов в этом случае целесообразно использовать следующие полиномы

где αP,i,j,αDP,i,j′ коэффициенты полиномов;
CОП - емкость конденсатора, образованного опорными электродами;
CОПП - пассивная составляющая емкости опорных электродов.
В приведенных примерах реализации емкостного датчика давления и разности давлений подвижные электроды емкостного преобразователя расположены на наружной стороне измерительной мембраны. Такое расположение электродов возможно является оптимальным техническим решением. Однако не исключен вариант расположения подвижных электродов на внутренней стороне измерительной мембраны, а также на обеих сторонах мембраны одновременно. В последнем случае измерительные части емкостного преобразователя образованы дифференциальными конденсаторами. Для этих вариантов приведенные доказательства возможности получения заявленных технических результатов изобретения также справедливы.
С целью повышения точности измерений и увеличения линейности преобразования измеряемых параметров измерительная мембрана может иметь специальный профиль.
Например, профиль, обеспечивающий максимально равную степень упругого напряжения материала мембраны в измерительной ее части. Вариант такого профиля 29 показан на фиг.4.
Деформация измерительной мембраны сопровождается изменением формы подвижных электродов, в результате чего характеристика преобразования величин смещений подвижных электродов в проводимости емкостей конденсаторов нелинейна. Для уменьшения нелинейности преобразования и уменьшения влияния измеряемых друг на друга в выходных результатах профиль мембраны может быть оптимизирован с учетом обеспечения минимальной деформации участков поверхности измерительной мембраны с подвижными электродами.
Дополнительно профиль мембраны может быть оптимизирован с учетом обеспечения минимальной нелинейности преобразования сил, воздействующих на мембрану, в смещения участков мембраны с подвижными электродами.
Оптимизированный профиль не обязательно должен быть равным во всех сечениях, проходящих через центральную ось мембраны. Методы расчета профиля мембраны с учетом приведенных критериев известны.
С целью уменьшения температурных градиентов и механических напряжений, передающихся с корпуса датчика, основание 23 измерительной мембраны предлагается выполнить в виде профиля, показанного на фиг.4, образованного двумя толстостенными цилиндрами 24 и 25, которые соединены между собой тонкостенным цилиндром 26. При этом один из толстостенных цилиндров предназначен для крепления в корпусе датчика, а второй охватывает измерительную часть мембраны 16.
Выравнивание температурного поля мембраны и уменьшение влияния внешних напряжений осуществляется за счет повышенного теплового сопротивления и меньшей жесткости части основания 23 измерительной мембраны, образованной тонкостенным цилиндром 26.
Поскольку измерительная мембрана и диэлектрическая подложка, как показано на фиг. 4, выполнены из разного материала, при плотном контакте опорной части диэлектрической подложки 17 с основанием 23 мембраны в случае изменения температуры возможны механические напряжения в подложке 17 и мембране 16. С целью уменьшения этих напряжений периферийная (опорная) часть подложки 17 выполнена в виде тонкостенных сегментов 27 цилиндра, опирающихся нижней частью на основание 23 мембраны 16 и охватывающих верхней частью часть подложки 17 с электродами. Сегменты 27, обладающие повышенной гибкостью, обеспечивают снижение механических напряжений в мембране 16 и подложке 17.
Существует вариант выполнения диэлектрической подложки с неподвижными электродами, имеющей профиль поверхности, обращенной к подвижным электродам, совпадающий с профилем поверхности мембраны при ее максимальной деформации. Достоинством такого варианта является повышение чувствительности и линейности преобразования деформации мембраны в емкость. Вариант на фигурах не показан.
С целью уменьшения температурных составляющих погрешностей емкостный преобразователь может содержать датчик 22 температуры (фиг.4). При этом полином (13), например, для начала измерения давления, будет иметь вид
где αPt,i,j,k - коэффициенты полинома;
t - температура емкостного преобразователя;
m3 - степень полинома по температуре.
Коэффициенты полиномов находят в процессе градуировки датчика давления и разности давлений описанным способом. В этом случае необходимо дополнительно варьировать температуру емкостного датчика давления и разности давлений.
Конструкция элемента передачи силы, показанная на фиг.1, не является единственно возможной. Также может быть использована жесткая конструкция элемента передачи силы. Нормальная по отношению к плоскости мембраны составляющая силы, воздействующей на измерительную мембрану через элемент передачи силы со стороны силовой мембраны, может возникнуть в результате неточной сборки датчика, температурных напряжений в силовой мембране и других факторов. Анализ деформации измерительной мембраны показывает, что эта составляющая существенно не изменяет характер деформации измерительной мембраны, который обусловлен моментом силы и давлением среды в плюсовой камере. Поэтому влияние на выходные результаты нормальной составляющей силы с элемента передачи силы может быть устранено при градуировке датчика.
Поскольку рассмотренная нормальная составляющая силы не приводит к нарушению работоспособности датчика, плоскость измерительной мембраны по отношению к плоскости силовой мембраны при необходимости может быть расположена под углом ϕ, отличающимся от 90o, например, под углом в пределах от 70 до 100o (см. фиг.1).
По конструкции силовой мембраны или блока мембран предлагаются следующие варианты.
Один из этих вариантов заключается в том, что емкостный датчик давления и разности давлений дополнен второй силовой мембраной, закрепленной в корпусе зеркально-симметричным образом относительно первой силовой мембраны, причем элемент передачи силы дополнительно присоединен к средней части второй силовой мембраны, а герметичная полость между мембранами заполнена диэлектрической жидкостью и охватывает измерительную мембрану с внутренней ее стороны.
Другой вариант характеризуется тем, что емкостный датчик давления и разности давлений дополнен двумя разделительными мембранами, расположенными по разные стороны от силовой мембраны и образующими две герметичные полости, причем одна из образованных этими мембранами полостей в корпусе датчика охватывает элемент передачи силы и измерительную мембрану с внутренней ее стороны, при этом обе полости заполнены диэлектрической жидкостью.
Варианты целесообразно использовать в случае, когда требуется изоляция измерительной мембраны от измеряемой среды. Кроме этого, в случае использования вариантов проще реализовать защиту мембран датчика от перегрузок. Варианты на фигурах не показаны.
В одном из вариантов корпус датчика выполнен разборным и включает в себя узел мембранного блока, в котором закреплены силовая мембрана, элемент передачи силы, измерительная мембрана, и два фланцевых элемента с отверстиями для передачи во внутренние камеры датчика измеряемых давлений. Мембранный блок также может содержать разделительные мембраны. Фланцевые элементы расположены с двух сторон мембранного блока.
Данный вариант корпуса нашел широкое распространение на практике и применим для предлагаемого датчика. Вариант на фигурах не показан.
Изобретение относится к приборостроению и может быть использовано для одновременного измерения двух параметров - давления и разности давлений, например, в расходомерах перепада давления. Емкостный датчик давления и разности давлений содержит корпус, силовую мембрану, элемент передачи силы, закрепленный в средней части силовой мембраны, измерительную мембрану, плоскость которой расположена под углом в пределах от 70 до 110o к плоскости силовой мембраны и смещена относительно центральной части силовой мембраны, причем средняя часть измерительной мембраны соединена с элементом передачи силы, емкостный преобразователь с подвижными и неподвижными электродами, причем подвижные электроды расположены по разные стороны от оси, проходящей через среднюю часть измерительной мембраны и параллельно плоскости силовой мембраны связаны с поверхностью измерительной мембраны и попарно с соответствующими неподвижными электродами образуют два конденсатора, емкости которых характеризуют измеряемые параметры. Такое выполнение обеспечивает возможность одновременного измерения двух параметров с использованием единого упругого элемента и единых измерительных цепей электронной схемы датчика. 9 з. п.ф-лы, 5 ил.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ЕМКОСТНЫЙ ДАТЧИК РАЗНОСТИ ДАВЛЕНИЙ | 1991 |
|
RU2010198C1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| US 4562742 A, 27.08.86, G 01 L 9/12 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Аппарат для автоматического тартания нефти из буровых | 1923 |
|
SU3095A1 |
