Изобретение относится к бесконтактным средствам контроля и измерения уровня жидких сред или уровней раздела разнородных по электрофизическим свойствам жидкостей и может быть использовано в автоматизированных системах управления технологическими процессами.
Известны [2 - 4] бесконтактные уровнемеры, выполненные на основе излучения видеоимпульсов. В данном способе в направлении контролируемой жидкой среды излучают зондирующие видеоимпульсы, принимают отраженные сигналы и определяют время задержки отраженных сигналов относительно зондирующих. Основными недостатками данного способа являются ограниченная точность измерения интервалов времени между излученными и принятыми импульсными сигналами [2, стр. 54] вследствие большой временной и температурной нестабильности времени запуска генераторов коротких импульсов, порядка (1 - 0,5) нс [4], а также громоздкость антенной системы [3].
Известны [1, 5, 6] бесконтактные уровнемеры, выполненные на основе ЧМ-радиолокатора. Измерение уровня в данном способе сводится к излучению частотно-модулированного зондирующего сигнала в направлении контролируемой среды, прием отраженного сигнала, смешивание его с сигналом, сформированным в местном гетеродине одновременно с передачей зондирующего сигнала, в результате чего образуется сигнал биений при подсчете числа нулей сигнала биений за время одного периода частотной модуляции, по которому определяют уровень жидкости. Основным недостатком данного способа является отсутствие селекции отраженных сигналов от нескольких уровней разделения жидкостей и, следовательно, искажение сигнала биений (когда мощность отраженных от двух уровней раздела жидкостей или уровня и от дна сосуда сигналов одного порядка), которое приводит к существенным погрешностям измерения уровня.
Наиболее близким по технической сущности является способ, приведенный в [1], в котором в направлении контролируемой жидкой среды излучается зондирующий радиоимпульс, принимается и детектируется отраженный от уровней раздела разнородных жидких сред радиоимпульсный сигнал. Измерение уровней в данном способе сводится к измерению интервалов времени между излученным и принятым отраженным от уровней раздела жидкостей радиоимпульсными сигналами.
Недостатком такого уровнемера является ограниченная точность измерения разности интервала времени между зондирующим и отраженным радиоимпульсами. Во-первых, существует нестабильность задержки запуска импульсного модулятора, описанная выше для времяимпульсных уровнемеров, во-вторых, - отсутствие привязки времени излучения радиоимпульса с фазой несущей частоты при некогерентном детектировании приводит к неконтролируемому смещению времени приема радиоимпульсного сигнала после детектирования на величину порядка половины длины волны несущей, что также вносит неконтролируемую погрешность в измерение уровней порядка половины длины волны несущей.
Целью изобретения является повышение точности измерения уровня жидких сред или уровней разделения разнородных по электрофизическим свойствам жидкостей.
Цель изобретения достигается тем, что к способу измерения уровня, в котором излучается зондирующий радиоимпульсный сигнал в направлении контролируемой жидкой среды и принимается отраженный от уровней раздела жидкостей сигнал, добавляется фазовое детектирование с выделением квадратурных составляющих принятого сигнала, измерение по квадратурным составляющим фазы принятых сигналов в выделенных временных точках, соответствующих времени задержки отраженных радиоимпульсов от каждого уровня раздела разнородных по электрофизическим свойствам жидкостей. Изменяя дискретно несущую частоту зондирующих радиоимпульсов от одного края рабочего диапазона к другому, по полной разности фаз отраженных сигналов от каждого уровня раздела определяют уровни раздела жидкостей.
Для измерения относительного изменения уровней раздела жидкостей с повышенной точностью при постоянной несущей частоте зондирующих радиоимпульсов (например, в середине рабочего диапазона) в выделенных временных точках, соответствующих времени задержки отраженных радиоимпульсов от каждого уровня раздела, по разности фаз между начальным измерением и текущим определяется относительное изменение уровней раздела жидкостей.
Для выделения временных точек, соответствующих времени задержки отраженных радиоимпульсов от каждого уровня раздела жидкостей, перед циклом измерения уровней раздела жидкостей (или периодически, при измерении относительных изменений уровней раздела) производятся сканирование по времени задержки, поиск и запоминание местоположения максимумов амплитуд сигналов, вычисленных по квадратурным составляющим.
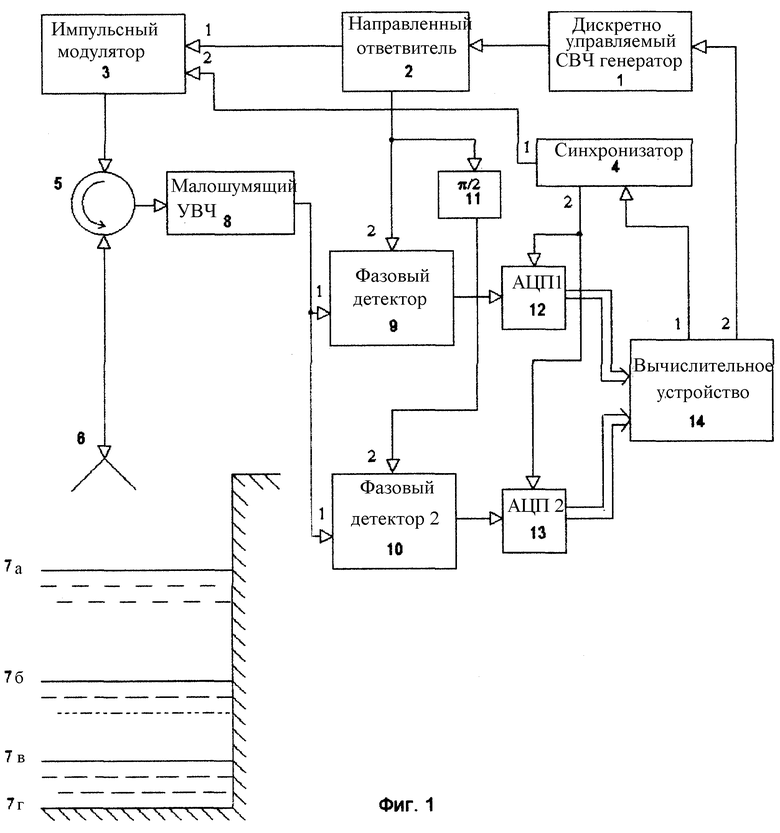
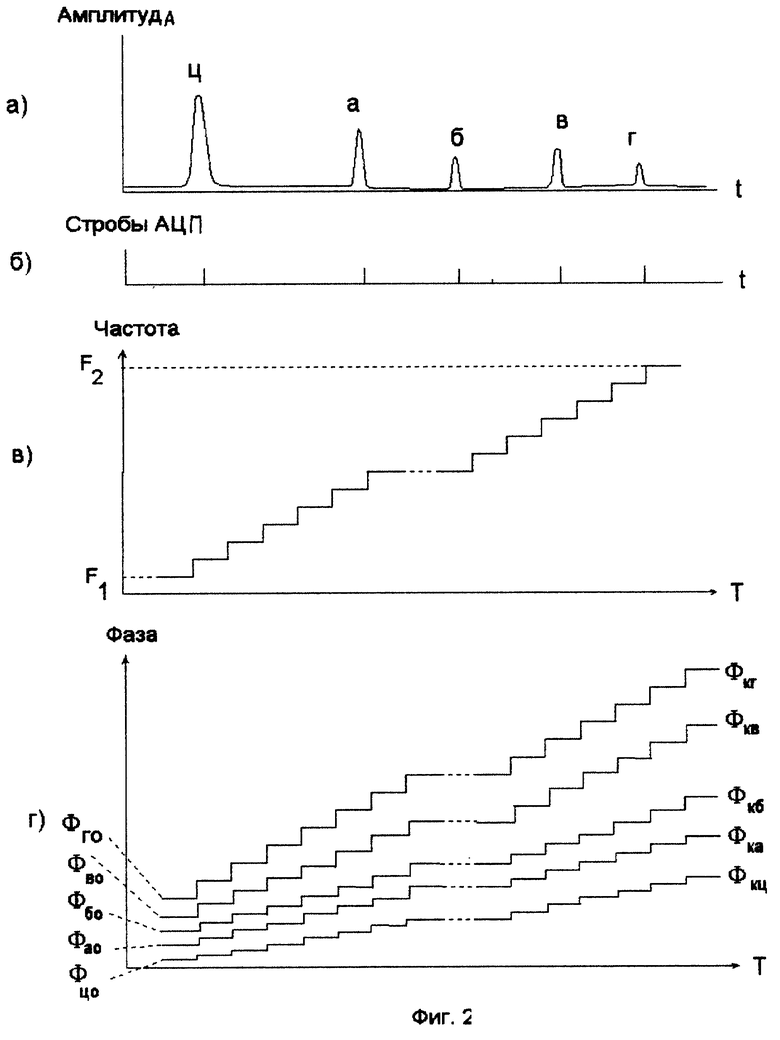
На фиг. 1 схематично показано устройство для осуществления предлагаемого способа; на фиг. 2 - временные диаграммы, объясняющие сущность способа: а - вид амплитуды просочившегося через циркулятор, отраженного от нескольких уровней раздела и от дна сосуда сигнала на выходах квадратурных фазовых детекторов; б - местоположение стробов АЦП (которые будут вырабатываться синхронизатором при измерении значений фазы), найденное после поиска максимумов амплитуд сигналов; в, г - соответственно изменение частоты излучения зондирующего сигнала во времени и изменение фазы принятых сигналов во времени, просочившегося через циркулятор отраженного от уровней раздела жидкостей и от дна сосуда, соответственно.
Устройство содержит дискретно управляемый СВЧ-генератор 1, выход которого через направленный ответвитель 2 соединен с первым входом импульсного модулятора 3, управляемого с первого выхода синхронизатора 4 через второй вход импульсного модулятора, выход которого через циркулятор 5 соединен с антенной 6, расположенной над контролируемыми поверхностями раздела разнородных жидкостей 7а, 7б,...7г и с малошумящим усилителем высокой частоты 8, выход которого соединен с первыми входами фазовых детекторов 9 и 10, второй вход первого фазового детектора 9 соединен со вторым выходом направленного ответвителя 2, а второй вход второго фазового детектора 10 соединен также со вторым выходом направленного ответвителя 2 через фазовращатель 11 на π/2. Выходы фазовых детекторов соединены с аналоговыми входами аналого-цифровых преобразователей АЦП1 12 и АЦП2 13, тактирующие входы которых соединены со вторым выходом синхронизатора 4. Цифровые выходы аналого-цифровых преобразователей соединены с вычислительным устройством 14, первый и второй выходы которого соединены с синхронизатором и дискретно управляемым СВЧ-генератором, соответственно.
Способ осуществляется следующим образом.
Несущая частота зондирующего радиоимпульсного сигнала задается дискретно управляемым СВЧ-генератором 1 в рабочем диапазоне частот от F0 до FK с дискретом ΔF:
Fk = F0 + k • ΔF, k = 0...K,
где k - номер излучаемой частоты, a K = (FK - F0)/ΔF - количество излучаемых частот в рабочем диапазоне.
Выходной радиоимпульсный сигнал, сформированный в импульсном модуляторе 3 под управлением синхронизатора 4, через циркулятор 5 поступает в антенну 6, излучается, а после зеркального отражения от контролируемых уровней раздела разнородных жидкостей 7а, 7б,...7в, а также от дна емкости 7г, принимается антенной 6 и через циркулятор 5 подается на малошумящий усилитель высокой частоты 8, на вход которого также поступает просочившийся через циркулятор 5 сигнал. На выходе малошумящего усилителя высокой частоты результирующий сигнал Uk(t) принимает вид
где Ai - радиолокационный множитель [8] от i-го уровня и дна или просочившегося сигнала в циркуляторе;
U0(t) - функция формы радиоимпульса излученного сигнала;
ti - время задержки отраженного радиоимпульса от i-го уровня;
tppt - полное время задержки в тракте направленный ответвитель 2, модулятор 3, циркулятор 5, малошумящий усилитель 6, фазовый детектор 9 или 10;
фq - начальная фаза дискретно управляемого СВЧ-генератора 1;
i - номер временной точки, соответствующий на фиг. 2 просочившемуся радиоимпульсу в циркуляторе - ц, отраженным видеосигналам от уровней раздела разнородных жидкостей - а, б,..., в и от дна сосуда - г.
Радиоимпульсы с выхода малошумящего усилителя высокой частоты поступают на первые входы фазовых детекторов 9 и 10. В качестве опорного сигнала на второй вход первого фазового детектора подается часть мощности дискретно управляемого СВЧ-генератора 1, подаваемого непосредственно с направленного ответвителя 2 - Ucm(t), а на второй вход второго фазового детектора - через фазовращатель 11 на π/2 - Usm(t), соответственно:
где Uоm - амплитуда опорного сигнала на выходе направленного ответвителя 2;
tg - время задержки в тракте направленный ответвитель 2 - фазовый детектор 9 или 10.
После произведения сигналов (1) на (2) в фазовых детекторах на их выходах выделяются квадратурные составляющие принятых сигналов Uck(t) и Usk(t), которые можно представить в виде
где Ui(t) = kd • Ai • Uот • U0(t) - огибающая отраженного сигнала от i-го уровня разделения;
kd - коэффициент преобразования фазового детектора;
Фd - фаза смещения квадратурного детектирования.
После преобразования квадратурных составляющих принятых сигналов (на аналого-цифровых преобразователях АЦП1 и АЦП2) в цифровую форму данные поступают в вычислительное устройство 14, в котором по значениям квадратурных составляющих вычисляются амплитуды сигналов Ampk(t) для k-й частоты дискретно управляемого СВЧ-генератора в соответствии с выражением
Для временного разделения отраженных сигналов от соседних уровней раздела жидкостей вычислительное устройство 14, управляя синхронизатором 4, при несущей частоте Fm зондирующего радиоимпульса, например, в середине рабочего диапазона, производит поиск и запоминание значений времени задержки tmaxi, соответствующих максимумам амплитуды сигнала Ampm(tmaxi), отраженного от i-го уровня раздела (см. фиг. 2а, б). Если длительность излученного радиоимпульса меньше чем 2ΔHmin/c, где ΔHmin - минимальное расстояние между двумя соседними уровнями раздела, с - скорость света, то происходит разделение соседних сигналов, сводя к минимуму взаимное влияние. Вышеописанная процедура позволяет производить вычисление и запоминание в вычислительном устройстве 14 значения фазы Фik каждого i-го сигнала для k-й частоты зондирования при сканировании по рабочему диапазону частот
где N - количество полных изменений фазы при изменении несущей частоты от F0 до Fk [9].
Для выбора шага перестройки несущей частоты необходимо выполнение условия 2π•ΔF•tmax < π/2, где tmax=tppt - tg + 2Hmax/c - максимальная задержка сигнала, соответствующая максимальному диапазону измеряемого уровня Hmax (при более чем двух измерениях фазы ее изменение будет не больше π), данное условие соответствует ΔF < c/8Hmax.
При изменении от меньшей частоты F0 к большей Fk с шагом ΔF значение N должно увеличиваться на единицу [9], если значение измеренной фазы на частоте Fk-1 больше, чем на частоте Fk, что позволяет проследить за суммарным изменением фазы каждого сигнала. На фиг. 2,г показано изменение фазы для просочившегося сигнала через циркулятор - ц, для отраженного сигнала от уровней раздела жидкостей - а, б,..., в и от дна сосуда - г при изменении частоты излучения, показанной на фиг. 2,в.
Как следует из выражения (5), изменение фазы ΔФi от i-го уровня при изменении частоты от F0 до Fk соответствует
ΔФi = ФiK-Фi0 = 2π•(FK-F0)•(tppt-tg+ti).
Отсюда можно вывести выражение для оценки времени задержки отраженного радиоимпульса от i-го уровня раздела жидкости
Так как в выражении (6) присутствует время задержки в приемопередающем тракте  имеющей большую как температурную нестабильность, так и временную, то для ее исключения воспользуемся наличием просочившегося в циркуляторе сигнала, для чего из оценки уровня i-го уровня вычтем оценку уровня, соответствующего просочившемуся сигналу в циркуляторе [4] . Окончательно можно написать выражение уточненной оценки времени задержки отраженного радиоимпульса от уровня раздела жидкостей относительно циркулятора в виде
имеющей большую как температурную нестабильность, так и временную, то для ее исключения воспользуемся наличием просочившегося в циркуляторе сигнала, для чего из оценки уровня i-го уровня вычтем оценку уровня, соответствующего просочившемуся сигналу в циркуляторе [4] . Окончательно можно написать выражение уточненной оценки времени задержки отраженного радиоимпульса от уровня раздела жидкостей относительно циркулятора в виде
где ΔФcir - разность фаз просочившегося сигнала в циркуляторе при изменении частоты от F0 до Fk.
При измерении относительного изменения уровней находим разность фаз ΔФTi = ФTi-Ф0i между измеренной фазой в текущий момент времени ФTi и фазой в начале измерения Ф0i для каждого сигнала, отраженного от i-го уровня при излучении зондирующего сигнала с постоянной частотой Fm, например, в середине рабочего диапазона. Тогда можно записать выражения для относительного изменения времени задержки отраженного радиоимпульса от каждого i-го уровня от начала измерения до текущего в виде
где tapp0, tappt - время задержки в приемопередающем тракте вначале и при текущем измерении, соответственно, которые вследствие временной нестабильности могут не совпадать.
С учетом вышесказанного для исключения временной и температурной нестабильности выражение для относительного изменения времени задержки отраженного радиоимпульса от уровня раздела жидкости относительно задержки просочившегося в циркуляторе сигнала запишется в виде
где ΔФTcir - разность фаз между началом измерения и текущим измерением для просочившегося сигнала в циркуляторе.
Соответствующие [10] погрешности абсолютного измерения времени задержки отраженного радиоимпульса от i-го уровня раздела жидкостей (7) и измерения относительного изменения времени задержки отраженного радиоимпульса от i-го уровня (8) запишутся в виде
где δФ - погрешность измерения фазы.
Из выражения (5) следует, что
здесь Ф - измеряемая фаза сигнала; δU - погрешность измерения квадратурных составляющих сигнала; A - амплитуда сигнала.
Если отношение напряжений сигнал/шум больше 30 дБ, то основная погрешность определяется погрешностью аналого-цифрового преобразования, имеющей значение не более половины дискрета, и для 8-разрядного АЦП, равной 1/(2 • 28) [11], тогда ошибка измерения фазы δФ будет не более 2,8 • 10-3. Погрешность установки частоты дискретно управляемого СВЧ-генератора δF определяется схемотехникой его построения и для ФАПЧ с переменным коэффициентом деления и опорным кварцевым генератором (синтезатор частот) относительная погрешность установки частоты не более 10-5 [7].
Таким образом для измерителя уровней с рабочим диапазоном 4.0 - 4.5 ГГц общая погрешность измерителя времени задержки отраженного радиоимпульса от уровней раздела жидкостей не более 6 псек  а для измерителя относительных изменений времени задержки отраженного радиоимпульса от уровней раздела жидкостей не более
а для измерителя относительных изменений времени задержки отраженного радиоимпульса от уровней раздела жидкостей не более 
Таким образом, предложенный способ позволяет обеспечить более высокую точность измерения времени задержки отраженного радиоимпульса от уровней раздела жидкостей в сравнении с прототипом, что выполняет поставленную цель изобретения.
Литература
1. Коган И.М. Ближняя радиолокация. - М., Сов. радио, 1973.
2. Беннетт С. Л., Росс Дэк. Ф. Время-импульсные процессы и их применения. ТИИЭР, 1978, т. 66, N 3, с. 35-37.
3. Авторское свидетельство СССР N 1659730, кл. G 01 F 23/28, 1988.
4. Патент РФ N 2023989, кл. G 01 F 23/28, 1992.
5. Авторское свидетельство СССР N 1642250, кл. C 01 F 23/28, 1989.
6. Авторское свидетельство СССР N 1659733, кл. G 01 F 23/28, 1989.
7. Хоровиц П. , Хилл У. Искусство схемотехники. т. 3. - М., Мир, 1993, стр. 151.
8. Жуковский А.П., Оноприенко Е.И., Чижов В.И. Теоретические основы радиовысотометрии. - М., Сов. радио, 1979.
9. Супряга Н.П. Радиолокационные средства непрерывного излучения. - М., Военное издательство МО, 1974, стр. 26.
10. Бакулев П. А., Степин В.М. Методы и устройства селекции движущихся целей. - М., Радио и связь, 1986.
11. Марцинкявичюс А.К., Багданскис Э.К. Быстродействующие интегральные микросхемы ЦАП и АЦП и измерение их параметров. - М., Радио и связь, 1988.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИМПУЛЬСНО-ФАЗОВЫЙ ИЗМЕРИТЕЛЬ ТОЛЩИНЫ СЛОЕВ РАЗНОРОДНЫХ ЖИДКОСТЕЙ, А ТАКЖЕ ИХ ОТНОСИТЕЛЬНОГО ИЗМЕНЕНИЯ С ПОВЫШЕННОЙ ТОЧНОСТЬЮ | 1999 |
|
RU2188399C2 |
| ИМПУЛЬСНО-ДОПЛЕРОВСКАЯ РАДИОВЫСОТОМЕРНАЯ СИСТЕМА | 2012 |
|
RU2500001C1 |
| ИМПУЛЬСНО-ДОПЛЕРОВСКИЙ РАДИОВЫСОТОМЕР | 2012 |
|
RU2522907C2 |
| ИМПУЛЬСНО-ДОПЛЕРОВСКАЯ РАДИОВЫСОТОМЕРНАЯ СИСТЕМА | 2012 |
|
RU2515524C2 |
| КОРРЕЛЯЦИОННЫЙ ИЗМЕРИТЕЛЬ ВЫСОТЫ И СОСТАВЛЯЮЩИХ ВЕКТОРА ПУТЕВОЙ СКОРОСТИ | 2012 |
|
RU2498344C2 |
| ИМПУЛЬСНО-ДОПЛЕРОВСКИЙ РАДИОВЫСОТОМЕР | 2013 |
|
RU2552837C1 |
| Способ навигации летательных аппаратов и устройство для его осуществления | 2019 |
|
RU2707269C1 |
| ИМПУЛЬСНО-ФАЗОВАЯ РАДИОВЫСОТОМЕРНАЯ СИСТЕМА | 2013 |
|
RU2551448C1 |
| СИГНАЛИЗАТОР УРОВНЯ ЖИДКОСТИ | 2023 |
|
RU2836446C2 |
| ТРЕХМЕРНАЯ СИСТЕМА ГОЛОГРАФИЧЕСКОГО РАДИОВИДЕНИЯ ДЛЯ ДОСМОТРА | 2017 |
|
RU2652530C1 |
Способы используются в автоматизированных системах управления технологическим процессом. Облучают жидкую среду радиоимпульсами СВЧ-генератора, осуществляют прием отраженных от уровней раздела жидкостей радиоимпульсов. Затем производят сканирование по несущей частоте зондирующих радиоимпульсных сигналов от одного конца диапазона рабочих частот к другому с заданным дискретом. Измеряют по квадратурным составляющим отраженных сигналов разность фаз между фазами отраженных сигналов в начале цикла сканирования и фазами в текущий момент сканирования в выделенные моменты времени, соответствующие времени задержки отраженных радиоимпульсных сигналов от каждого уровня раздела жидкостей относительно зондирующих сигналов. Вычисляют в каждом цикле сканирования суммарные разности фаз между фазами отраженных сигналов в начале и конце цикла сканирования для каждого уровня раздела жидкостей и после окончания циклов сканирования по несущей частоте по вычисленным значениям разностей фаз определяют значения уровней жидкостей. Измерения относительных изменений уровней раздела жидкостей осуществляют на фиксированной несущей частоте зондирующих радиоимпульсных сигналов в выделенных временных точках. Обеспечено повышение точности измерения. 2 с. и 2 з.п.ф-лы, 2 ил.