Изобретение относится к области радиолокации, в частности к бортовым измерителям высоты полета, составляющих векторы скорости, и может быть использовано в автономных бортовых радиосистемах управления посадкой летательных аппаратов.
Известен [1] доплеровский измеритель составляющих вектора скорости, высоты и местной вертикали для вертолетов и космических аппаратов вертикальной посадки. Для выделения сигнала фазы в нем использован способ, при котором входной сигнал разделяется на две составляющие: одну, образованную доплеровским смещением верхней боковой, и вторую, образованную доплеровским смещением нижней боковой излученного сигнала. Полученные составляющие перемножаются. Разделение сигналов происходит после фильтрации в блоке быстрого преобразования Фурье.
Известен [2] радиолокатор непрерывного излучения с частотной модуляцией, который обеспечивает одновременное измерение трех составляющих скорости и абсолютной высоты. Для определения скорости используется метод Доплера при низкой частоте частотной модуляции, а получение данных о высоте обеспечивается путем сравнения фазы одной из боковых полос принимаемого спектра.
Недостатком вышеуказанных устройств является большое время измерения составляющих вектора скорости (порядка нескольких секунд), ввиду того, что оценка доплеровской частоты проводится по амплитудам гармоник спектра доплеровских частот отраженных от подстилающей поверхности сигналов. Амплитуды гармоник, полученные по одному циклу быстрого преобразования Фурье, являются случайными и требуется дополнительное усреднение по циклам анализа.
Наиболее близким по технической сущности является импульсно-фазовый измеритель толщины слоев разнородных жидкостей, а также их относительного изменения с повышенной точностью [3], содержащий синхронизатор, аналого-цифровой преобразователь (АЦП), буферное оперативное запоминающее устройство (БОЗУ), направленный ответвитель, импульсный модулятор, фазовращатель, управляемый аттенюатор, циркулятор, приемопередающую антенну, малошумящий усилитель высокой частоты (УВЧ), фазовый детектор, видеоусилитель, блок регулировки усиления, блок регулировки ослабления, источник тока, управляемый напряжением (УН), контроллер обмена, вычислительное устройство, дискретно управляемый сверхвысокочастотный (СВЧ) генератор, выход которого соединен с входом направленного ответвителя, первый выход которого соединен с первым входом импульсного модулятора, второй вход которого соединен со вторым выходом синхронизатора, первый выход которого соединен с первым входом фазовращателя, второй вход которого соединен с выходом импульсного модулятора, а выход - с первым входом управляемого аттенюатора, выход которого соединен с первым входом циркулятора, вход/выход которого соединен с входом/выходом приемопередающей антенны, а выход - с входом малошумящего УВЧ, выход которого соединен с первым входом фазового детектора, второй вход которого соединен со вторым выходом направленного ответвителя, а выход - с первым входом видеоусилителя, второй вход которого соединен с выходом блока регулировки усиления, а выход - с первым входом АЦП, все выходы которого соединены со всеми пятыми входами БОЗУ, первый вход которого соединен со вторым входом АЦП и третьим выходом синхронизатора, четвертый выход которого соединен с первым входом вычислительного устройства, второй, третий, четвертый, пятый выходы которого соединены соответственно со вторыми входами блока регулировки ослабления и блока регулировки усиления, контроллера обмена, БОЗУ, шестой, седьмой и тринадцатый выходы - соответственно с третьим, четвертым и седьмым входами БОЗУ, десятый и одиннадцатый выходы - соответственно со вторым и первым входами дискретно управляемого СВЧ генератора, восьмой и девятый выходы - соответственно со вторым и третьим входами синхронизатора, первый вход которого соединен с выходом БОЗУ, все шестые входы/выходы которого соединены по шине данных со всеми двенадцатыми входами/выходами вычислительного устройства, всеми первыми входами/выходами контроллера обмена, все третьи входы/выходы которого являются входами/выходами измерителя, а также - со всеми первыми входами блока регулировки усиления, всеми четвертыми входами синхронизатора, всеми первыми входами блока регулировки ослабления, выход которого соединен с входом источника тока УН, выход которого соединен со вторым входом управляемого аттенюатора.
Импульсно-фазовый измеритель излучает в направлении поверхности и принимает когерентную последовательность радиоимпульсов, образованную путем стробирования непрерывного опорного сигнала. При этом радиоимпульсы в приемнике, путем умножения на опорный сигнал, преобразуются в биполярные видеоимпульсы, огибающая которых флюктуирует по амплитуде с частотой, определяемой доплеровским сдвигом частоты сигналов, отраженных от подстилающей поверхности.
Недостаток прототипа рассматриваемого устройства заключается в том, что он не измеряет составляющие вектора путевой скорости.
Целью настоящего изобретения является расширение функциональных возможностей импульсно-доплеровского радиовысотомера для измерения составляющих вектора путевой скорости, повышения быстродействия и точности измерений.
Указанная цель достигается тем, что в устройство [3], содержащее синхронизатор, АЦП, БОЗУ, направленный ответвитель, импульсный модулятор, фазовращатель, управляемый аттенюатор, циркулятор, малошумящий УВЧ, фазовый детектор, видеоусилитель, блок регулировки усиления, блок регулировки ослабления, источник тока УН, контроллер обмена, вычислительное устройство, дискретно управляемый СВЧ-генератор, выход которого соединен с входом направленного ответвителя, первый выход которого соединен с первым входом импульсного модулятора, второй вход которого соединен со вторым выходом синхронизатора, первый выход которого соединен с первым входом фазовращателя, второй вход которого соединен с выходом импульсного модулятора, а выход - с первым входом управляемого аттенюатора, выход управляемого аттенюатора соединен с первым входом циркулятора, выход которого соединен с входом малошумящего УВЧ, выход которого соединен с первым входом фазового детектора, второй вход которого соединен со вторым выходом направленного ответвителя, а выход - с первым входом видеоусилителя, второй вход которого соединен с выходом блока регулировки усиления, а выход - с первым входом АЦП, все выходы которого соединены со всеми пятыми входами БОЗУ, первый вход которого соединен со вторым входом АЦП и третьим выходом синхронизатора, четвертый выход которого соединен с первым входом вычислительного устройства, второй, третий, четвертый, пятый выходы которого соединены соответственно со вторыми входами блока регулировки ослабления и блока регулировки усиления, контроллера обмена, БОЗУ, шестой, седьмой и тринадцатый выходы - соответственно с третьим, четвертым и седьмым входами БОЗУ, десятый и одиннадцатый выходы - соответственно со вторым и первым входами дискретно управляемого СВЧ-генератора, восьмой и девятый выходы - соответственно со вторым и третьим входами синхронизатора, первый вход которого соединен с выходом БОЗУ, все шестые входы/выходы которого соединены по шине данных со всеми двенадцатыми входами/выходами вычислительного устройства, всеми первыми входами/выходами контроллера обмена, все третьи входы/выходы которого являются входами/выходами устройства, а также - со всеми первыми входами блока регулировки усиления, всеми четвертыми входами синхронизатора, всеми первыми входами блока регулировки ослабления, выход которого соединен с входом источника тока УН, выход которого соединен со вторым входом управляемого аттенюатора, введены трехлучевая приемопередающая антенна, антенный переключатель (АП), блок управления АП и вычислитель перемещений, при этом второй вход/выход циркулятора соединен с четвертым входом/выходом АП, первый, второй и третий входы/выходы которого соединены соответственно с первым, вторым и третьим входами/выходами трехлучевой приемопередающей антенны, а пятый, шестой и седьмой входы соединены соответственно с первым, вторым и третьим выходами блока управления АП, первый, второй и третий входы которого соединены соответственно с первым, вторым и пятым выходами синхронизатора, первый, второй, третий и пятый входы вычислителя перемещений соединены соответственно с тринадцатым, седьмым, четырнадцатым и пятнадцатым выходами вычислительного устройства, все четвертые входы/выходы соединены со всеми двенадцатыми входами/выходами вычислительного устройства и всеми шестыми входами/выходами БОЗУ, а выход - со вторым входом вычислительного устройства.
В заявляемой импульсно-фазовой радиовысотомерной системе используется прямой метод измерения доплеровской частоты путем подсчета числа ее периодов за заданное время. Для определения знака доплеровской частоты используется тот факт, что при смене знака доплеровской частоты изменяется знак разности фаз квадратурных составляющих.
Сопоставительный анализ с прототипом показывает, что заявляемое устройство отличается наличием новых блоков, их связями между собой и с другими блоками прототипа. Таким образом, заявляемое устройство соответствует критерию «новизна».
Предлагаемое исполнение импульсно-фазовой радиовысотомерной системы неизвестно, приводит к расширению функциональных возможностей, повышению быстродействия системы и точности измерений. Это позволяет сделать вывод о соответствии технического решения критерию «существенные отличия».
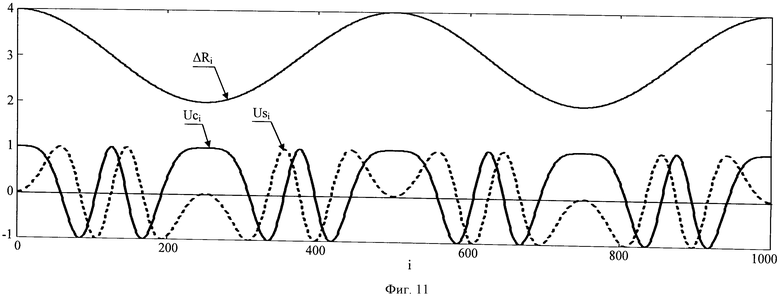
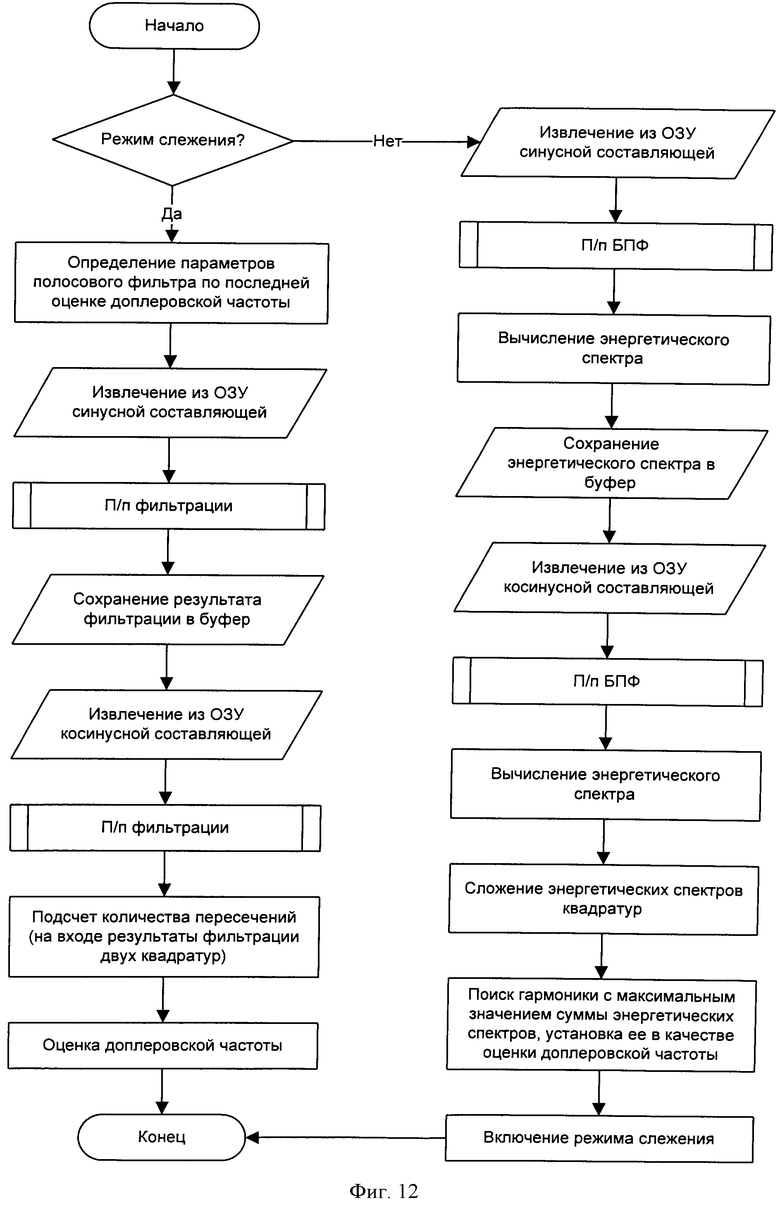
На фиг.1 представлена функциональная схема импульсно-фазовой радиовысотомерной системы. На фиг.2 представлена функциональная схема АП. На фиг.3 представлена функциональная схема блока управления АП. На фиг.4 представлена функциональная схема синхронизатора. На фиг.5 представлена функциональная схема БОЗУ. На фиг.6 представлена блок-схема алгоритма работы подпрограммы установки режима приемопередающего модуля при излучении радиоимпульсов и накоплении радиоимпульсов, отраженных от подстилающей поверхности. На фиг.7 представлены временные диаграммы работы блока управления АП. На фиг.8 представлено взаимное расположение лучей, формируемых трехлучевой приемопередающей системой, и области засветки подстилающей поверхности. На фиг.9 представлено восстановление отраженного сигнала методом нониуса. На фиг.10 представлена блок-схема алгоритма программной регулировки усиления приемного тракта и мощности излучения. На фиг.11 представлено изменение синусной и косинусной составляющих отраженного сигнала при изменении расстояния летательного аппарата до отражающей поверхности. На фиг.12 представлена блок-схема алгоритма поиска и сопровождения отраженного сигнала по доплеровской частоте.
Импульсно-фазовая радиовысотомерная система содержит дискретно управляемый СВЧ-генератор 1, направленный ответвитель 2, импульсный модулятор 3, фазовращатель 4, управляемый аттенюатор 5, циркулятор 6, малошумящий УВЧ 9, фазовый детектор 10, видеоусилитель 11, АЦП 12, БОЗУ 13, синхронизатор 14, вычислительное устройство 15, контроллер обмена 16, блок 17 регулировки усиления, блок 18 регулировки ослабления, источник 19 тока УН, трехлучевую приемопередающую антенну 101, АП 102, блок 103 управления АП, вычислитель 104 перемещений.
При этом выход дискретно управляемого СВЧ-генератора 1 соединен с входом направленного ответвителя 2, первый выход которого соединен с первым входом импульсного модулятора 3, второй вход которого соединен со вторым входом блока 103 управления АП и со вторым выходом синхронизатора 14, первый выход которого соединен с первым входом блока 103 управления АП и первым входом фазовращателя 4, второй вход которого соединен с выходом импульсного модулятора 3, а выход - с первым входом управляемого аттенюатора 5, выход которого соединен с первым входом циркулятора 6, второй вход/выход которого соединен с четвертым входом/выходом АП 102, первый, второй и третий входы/выходы которого соединены соответственно с первым, вторым и третьим входами/выходами трехлучевой приемопередающей антенны 101, а пятый, шестой и седьмой входы соединены соответственно с первым, вторым и третьим выходами блока 103 управления АП, третий вход которого соединен с пятым выходом синхронизатора 14, а выход циркулятора 6 соединен с входом малошумящего УВЧ 9, выход которого соединен с первым входом фазового детектора 10, второй вход которого соединен со вторым выходом направленного ответвителя 2, а выход - с первым входом видеоусилителя 11, второй вход которого соединен с выходом блока 17 регулировки усиления, а выход - с первым входом АЦП 12, все выходы которого соединены со всеми пятыми входами БОЗУ 13, первый вход которого соединен со вторым входом АЦП 12 и третьим выходом синхронизатора 14, четвертый выход которого соединен с первым входом вычислительного устройства 15, второй, третий, четвертый, пятый выходы которого соединены соответственно со вторыми входами блока 18 регулировки ослабления и блока 17 регулировки усиления, контроллера обмена 16, БОЗУ 13, шестой выход - с третьим входом БОЗУ 13, седьмой выход - с четвертым входом БОЗУ 13 и вторым входом вычислителя 104 перемещений, тринадцатый выход - с седьмым входом БОЗУ 13 и первым входом вычислителя 104 перемещений, четырнадцатый и пятнадцатый выходы - с третьим и пятым входами вычислителя 104 перемещений, второй вход - с выходом вычислителя 104 перемещений, десятый и одиннадцатый выходы - соответственно со вторым и первым входами дискретно управляемого СВЧ-генератора 1, восьмой и девятый выходы - соответственно со вторым и третьим входами синхронизатора 14, первый вход которого соединен с выходом БОЗУ 13, все шестые входы/выходы которого соединены по шине данных со всеми двенадцатыми входами/выходами вычислительного устройства 15, со всеми четвертыми входами/выходами вычислителя 104 перемещений, всеми первыми входами/выходами контроллера обмена 16, все третьи входы/выходы которого являются входами/выходами системы, а также - со всеми первыми входами блока 17 регулировки усиления, всеми четвертыми входами синхронизатора 14, всеми первыми входами блока 18 регулировки ослабления, выход которого соединен с входом источника 19 тока УН, выход которого соединен со вторым входом управляемого аттенюатора 5.
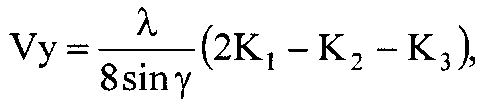
В состав АП 102 (фиг.2) входят первый СВЧ-ключ 73, второй СВЧ-ключ 74, третий СВЧ-ключ 75. При этом первые входы/выходы первого СВЧ-ключа 73, второго СВЧ-ключа 74 и третьего СВЧ-ключа 75 являются соответственно первым, вторым и третьим входами/выходами АП 102, вторые входы первого СВЧ-ключа 73, второго СВЧ-ключа 74 и третьего СВЧ-ключа 75 являются соответственно пятым, шестым и седьмым входами АП 102, а третьи входы/выходы первого СВЧ-ключа 73, второго СВЧ- ключа 74 и третьего СВЧ-ключа 75 соединены между собой и являются четвертым входом/выходом АП 102.
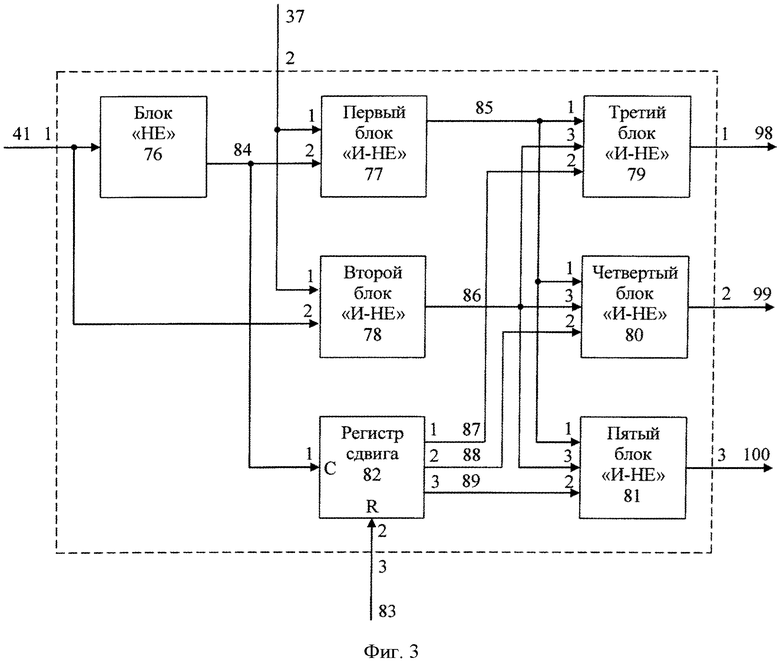
В состав блока 103 управления АП (фиг.3) входят блок 76 «НЕ», первый блок 77 «И-НЕ», второй блок 78 «И-НЕ», третий блок 79 «И-НЕ», четвертый блок 80 «И-НЕ», пятый блок 81 «И-НЕ», регистр 82 сдвига. При этом вход блока 76 «НЕ», являющийся первым входом блока 103 управления АП, соединен со вторым входом второго блока 78 «И-НЕ», первый вход которого (являющийся вторым входом блока 103 управления АП), соединен с первым входом первого блока 77 «И-НЕ», выход которого соединен соответственно с первыми входами третьего 79, четвертого 80, пятого 81 блоков «И-НЕ», выходы которых являются соответственно первым, вторым, третьим выходами блока 103 управления АП, все третьи входы которых соединены между собой и выходом второго блока 78 «И-НЕ», а все вторые входы - соответственно с первым, вторым, третьим выходами регистра 82 сдвига, первый вход которого соединен с выходом блока 76 «НЕ» и вторым входом первого блока 77 «И-НЕ», а второй вход регистра 82 сдвига является третьим входом блока 103 управления АП.
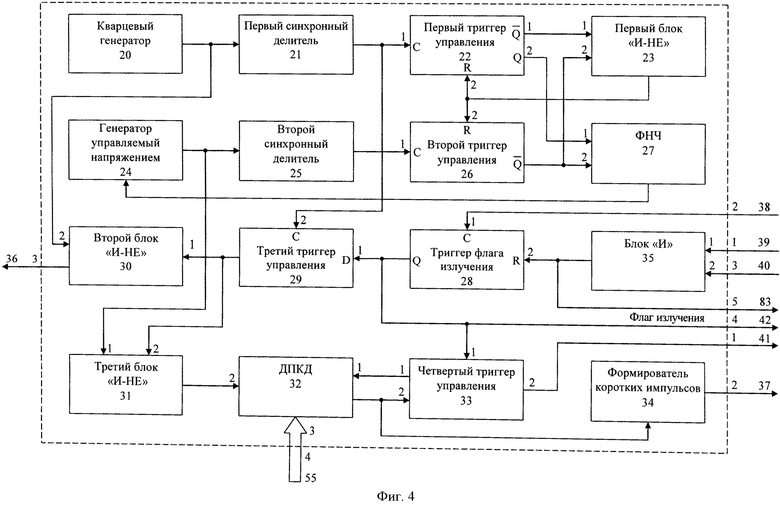
Синхронизатор 14 (фиг.4) содержит кварцевый генератор 20, первый синхронный делитель 21, первый триггер 22 управления, первый блок 23 «И-НЕ», генератор 24, управляемый напряжением, второй синхронный делитель 25, второй триггер 26 управления, фильтр 27 низких частот (ФНЧ), триггер 28 флага излучения, третий триггер 29 управления, второй блок 30 «И-НЕ», третий блок 31 «И-НЕ», делитель с переменным коэффициентом деления (ДПКД) 32, четвертый триггер 33 управления, формирователь 34 коротких импульсов, блок 35 «И». При этом выход кварцевого генератора 20 соединен с входом первого синхронного делителя 21 и вторым входом второго блока 30 «И-НЕ», выход 36 которого является третьим выходом синхронизатора 14, а первый вход соединен со вторым входом третьего блока 31 «И-НЕ» и выходом третьего триггера 29 управления, второй вход которого соединен с выходом первого синхронного делителя 21 и первым входом первого триггера 22 управления, первый выход которого соединен с первым входом первого блока 23 «И-НЕ», выход которого соединен со вторыми входами второго триггера 26 управления и первого триггера 22 управления, второй выход которого соединен с первым входом ФНЧ 27, выход которого соединен с входом генератора 24, управляемого напряжением, а второй вход - со вторым входом первого блока 23 «И-НЕ» и выходом второго триггера 26 управления, первый вход которого соединен с выходом второго синхронного делителя 25, вход которого соединен с выходом генератора 24, управляемого напряжением, и первым входом третьего блока 31 «И-НЕ», выход которого соединен со вторым входом ДПКД 32, все третьи входы 55 которого являются четвертыми входами синхронизатора 14, а выход соединен с входом формирователя 34 коротких импульсов, выход 37 которого является вторым выходом синхронизатора 14, а также - со вторым входом четвертого триггера 33 управления, первый выход которого соединен с первым входом ДПКД 32, второй выход 41 является первым выходом синхронизатора 14, а первый вход 42, являющийся флагом излучения и четвертым выходом синхронизатора 14, подключен к первому входу третьего триггера 29 управления и выходу триггера 28 флага излучения, первый вход которого 38 является вторым входом синхронизатора 14, а второй вход 83 является пятым выходом синхронизатора 14 и подключен к выходу блока 35 «НЕ», первый 39 и второй 40 входы которого являются соответственно первым и третьим входами синхронизатора 14.
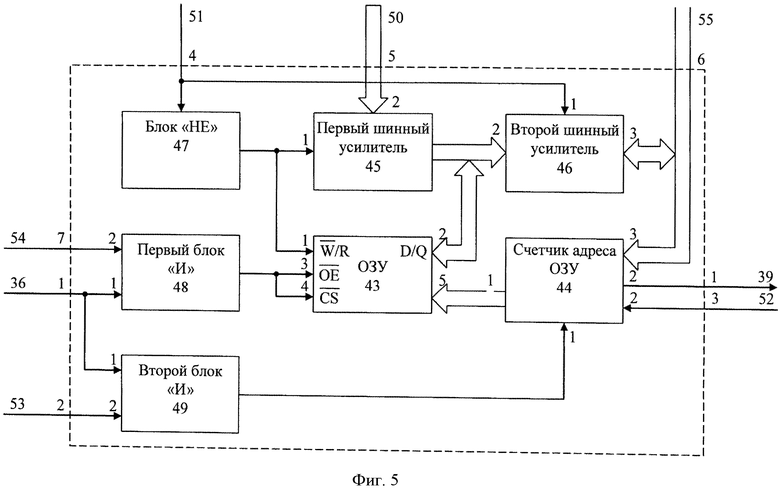
БОЗУ 13 (фиг.5) содержит ОЗУ 43, счетчик 44 адреса ОЗУ, первый 45 и второй 46 шинные усилители, блок 47 «НЕ», первый 48 и второй 49 блоки «И». При этом первый вход ОЗУ 43 соединен с выходом блока 47 «НЕ» и первым входом первого шинного усилителя 45, все вторые входы 50 которого являются пятыми входами БОЗУ 13, а все выходы соединены со всеми вторыми входами/выходами ОЗУ 43 и всеми вторыми входами второго шинного усилителя 46, первый вход 51 которого соединен с входом блока 47 «НЕ», и является четвертым входом БОЗУ 13, а все третьи входы/выходы, являющиеся шестыми входами/выходами БОЗУ 13, подключены ко всем третьим входам 55 счетчика 44 адреса ОЗУ, все первые выходы которого подключены ко всем пятым входам ОЗУ 43, четвертый вход которого соединен с третьим входом ОЗУ 43 и выходом первого блока 48 «И», второй вход 54 которого является седьмым входом БОЗУ 13, а первый вход 36, являющийся первым входом БОЗУ 13, соединен с первым входом второго блока 49 «И», второй вход 53 которого является вторым входом БОЗУ 13, а выход подключен к первому входу счетчика 44 адреса ОЗУ, вторые вход 52 и выход 39 которого являются соответственно третьим входом и первым выходом БОЗУ 13.
Вычислительное устройство 15 представляет собой однопроцессорный вычислитель, описанный в [4].
Вычислитель 104 перемещений аналогичен вычислительному устройству 15.
Трехлучевая приемопередающая антенна 101 представляет собой зеркальную параболическую антенну, формирующую три луча [5].
Импульсно-фазовая радиовысотомерная система работает следующим образом. После подачи питания на систему вычислительное устройство 15 проводит сигналом 40 начальную установку триггера 28 флага излучения синхронизатора 14, сигналом 83 начальную установку регистра 82 сдвига блока 103 управления АП, сигналами 65 и 64 записывает нулевое значение усиления и ослабления в блоки 17 и 18 регулирования усиления и ослабления (Nyc=0, Nосл=0), записывает сигналами 52 и 53 по шине данных 55 в счетчик 44 адреса ОЗУ БОЗУ 13 нулевое значение кода (устанавливается тем самым низкий логический уровень сигнала 39 - окончание режима излучения и накопления), проводит опрос контроллера обмена 16 с внешними системами, который переводит систему в режим измерения и задержки отраженного от подстилающей поверхности сигнала, устанавливает сигналами 63 и 67 несущую частоту СВЧ-генератора 1 на середину рабочего диапазона.
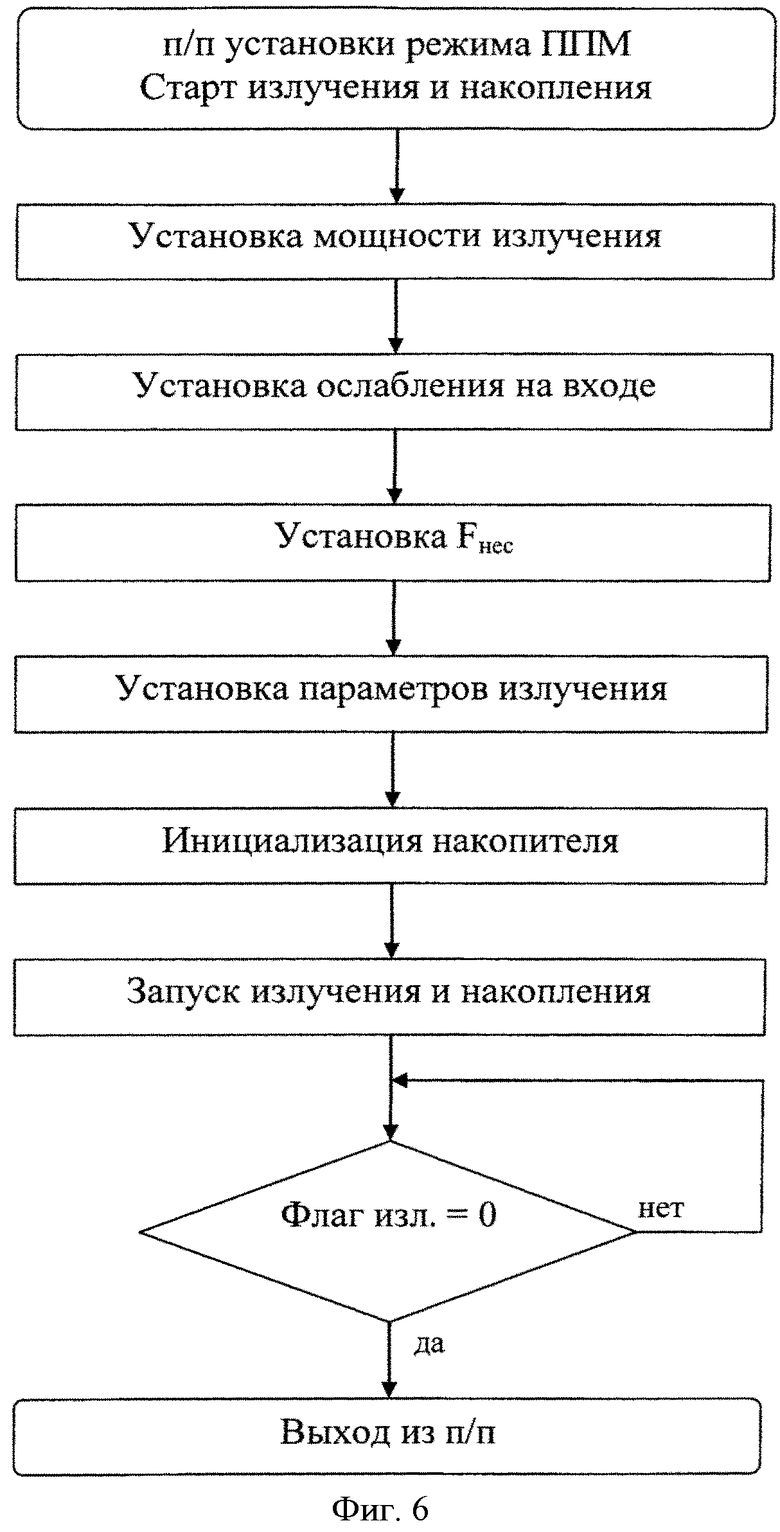
После этого вычислительное устройство 15 запускает подпрограмму установки параметров приемопередающего модуля (ППМ) и старта излучения и накопления. Алгоритм работы подпрограммы приведен на фиг.6. Подпрограмма устанавливает несущую частоту Fнес на дискретно управляемом СВЧ-генераторе 1, записывает в блоки 17 и 18 регулировки усиления и ослабления, записывает нулевое значение кода в счетчик 44 адреса ОЗУ БОЗУ 13, запускает таймер на время tуст.ППМ - время установки параметров ППМ (дискретно управляемый СВЧ-генератор 1, направленный ответвитель 2, импульсный модулятор 3, фазовращатель 4, управляемый аттенюатор 5, малошумящий УВЧ 9, фазовый детектор 10, видеоусилитель 11), после чего проводится запуск режима излучения и накопления, анализ флага излучения 42.
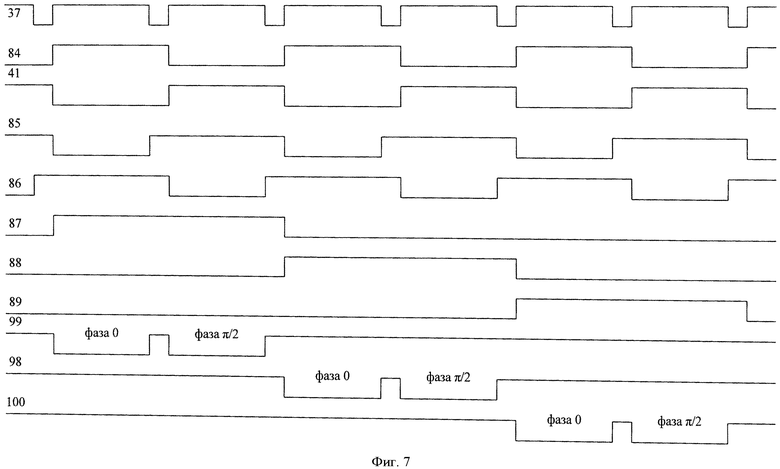
На фиг.7 показаны временные диаграммы работы блока 103 управления АП в режиме излучения и накопления. АП 102 подключает на прием попеременно первый, второй, третий лучи трехлучевой приемопередающей антенны 101 (фиг.8). Каждый луч включается на прием радиоимпульсов в течение времени, равном длительности двух периодов излучения (периоды с фазами 0 и π/2). Через время, равное длительности шести периодов излучения зондирующих импульсов, повторяется цикл приема (на три луча) радиоимпульсов, отраженных от подстилающей поверхности.
Через циркулятор 6, многолучевую приемопередающую антенну 101 обеспечивается излучение радиоимпульсов по направлению к подстилающей поверхности.
Принятые от подстилающей поверхности трехлучевой приемопередающей антенной 101 радиоимпульсы 94 (через третий СВЧ-ключ 75), радиоимпульсы 95 (через второй СВЧ-ключ 74), радиоимпульсы 96 (через первый СВЧ-ключ 73) поочередно поступают на циркулятор 6 (сигнал 93) и далее на вход малошумящего УВЧ 9.
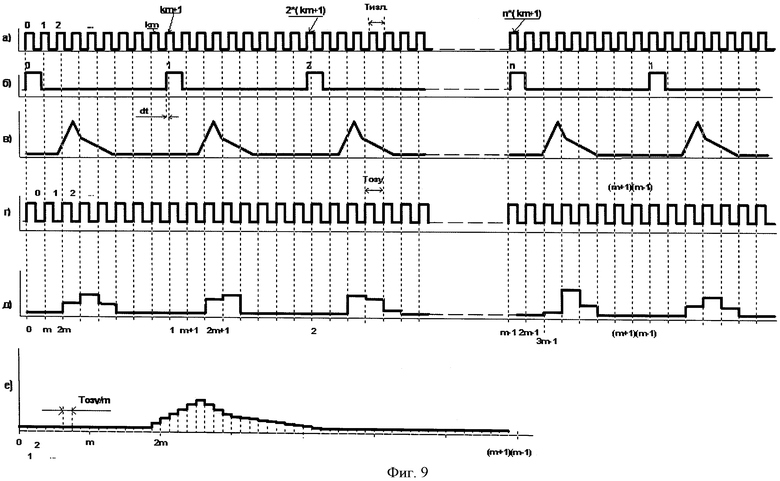
Излучение и тактирование АЦП 12 и запись в БОЗУ 13 начинаются в момент времени t0 (фиг.9) [6]. Радиоимпульсы излучаются по тактам с номерами 0, km+1, 2·(km+1), …, n·(km+1), …(фиг.9а), 9б)), где m - параметр нониуса, k - расширитель временного диапазона для сигнала, n - номер излучения. Tизл - период тактовых импульсов.
Преобразование принятого сигнала (фиг.9в)) в АЦП 12 и запись в БОЗУ 13 проводится по каждому такту с периодом Tозу (фиг.9г), 9д)). Если выполняется условие совпадения фронтов тактовых импульсов излучения и тактирования АЦП 12 и БОЗУ 13:

Условие (1) можно записать в виде:
Fизл/m=Fозу/(m-1)
где Fизл=1/Tизл - частота тактовых импульсов излучения;
Fозу=1/Tозу - частота тактовых импульсов АЦП 12 и БОЗУ 13.
Если второе и последующие излучения выдавать в моменты n·(km+1)·Tизл, то следующий такт АЦП 12 и БОЗУ 13 придет в момент n·[k(m-1)+1]·Tозу с задержкой dtn, то из уравнения:
n·(km+1)·Tизл+dtn=n·[k(m-1)+1]·Tозу
можно показать, что n-тое излучение начинается раньше n·[k(m-1)+1] тактового импульса АЦП 12 и БОЗУ 13 на величину:
dtn=n·Tозу/m.
Отсюда получаем, что для восстановления принятого сигнала с шагом Tозу/m необходимо Nизл=m, а объем БОЗУ 13 Lозу определяется из уравнения:
m·(km+1)·Tизл=Lозу·Tозу,
тогда объем БОЗУ, необходимый для восстановления принятого сигнала, равен Lозу=(km+1)·(m-1).
Запись цифровых данных в БОЗУ 13 происходит следующим образом: на первые входы ОЗУ 43 и первый шинный усилитель 45 подают сигнал нулевого логического уровня, а на первый вход второго шинного усилителя 46 - сигнал логической единицы, которым второй шинный усилитель 46 устанавливается по третьему выходу/входу в третье состояние. При этом по второму входу/выходу ОЗУ 43 поступает цифровой код с выхода шинного усилителя 45, который подключает данные АЦП 12 с выхода 50 на второй вход/выход ОЗУ 43, притом адрес ОЗУ 43 выбирается параллельным кодом с первого выхода синхронного счетчика 44 адреса ОЗУ, работающего как последовательный счетчик по фронту сигналов 36, прошедших через второй блок 49 «И» на его первый вход. Запись сигналов в ОЗУ 43 происходит по нулевому логическому уровню на входах CS и OE. Высокий уровень сигнала OE на третьем входе ОЗУ 43 устанавливает его в третье состояние по входу/выходу 2. Высокий уровень сигнала CS на четвертом входе ОЗУ 43 устанавливает его в режим хранения информации. Сигнал 39 со второго выхода счетчика адреса ОЗУ 44 является сигналом окончания режима излучения и накопления, поступает на первый вход синхронизатора 14 для обнуления триггера 28 флага излучения.
В режиме считывания цифровых данных из БОЗУ 13 предусмотрено обращение вычислительного устройства 15 к ОЗУ 43. По шине данных 55 из вычислительного устройства 15 в счетчик 44 адреса ОЗУ записывается требуемый код адреса ОЗУ 43 «отрицательными» сигналами логического вида 52 и 53 из вычислительного устройства 15, причем фронт сигнала 53 должен находиться внутри сигнала 52 [7], а второй шинный усилитель 46 должен находиться по третьему входу/выходу в третьем состоянии. После этого вычислительное устройство 15 выдает сигнал 105 логической единицы, переключающий четвертый вход/выход вычислителя 104 перемещений на прием информации по шине данных 55, и сигнал 51 логического нуля на первый вход второго шинного усилителя 46 БОЗУ 13 и второй вход вычислителя 104 перемещений, снимающий третье состояние с третьего входа/выхода шинного усилителя 46 БОЗУ 13 и четвертого входа/выхода вычислителя 104 перемещений, а на первый вход ОЗУ 43 и первый вход первого шинного усилителя 45 подается сигнал логической единицы, переводящий ОЗУ 43 в режим считывания, а первый шинный усилитель 45 по выходу в третье состояние. Сигнал 36 в режиме считывания имеет высокий логический уровень, а для считывания информации с вычислительного устройства 15 на второй вход первого блока 48 «И» БОЗУ 13 и на первый вход вычислителя 104 перемещений выдается «отрицательный» сигнал 54 логического вида, который, поступая на третий и четвертый входы ОЗУ 43, инициирует считывание цифровой информации со второго входа/выхода ОЗУ 43 через второй шинный усилитель 46 по шине данных 55 на вычислительное устройство 15 и вычислитель 104 перемещений. После чего третий вход/выход шинного усилителя 46 БОЗУ 13 переходит в третье состояние, вычислительное устройство 15 выдает сигнал 105 логического нуля, переключающий четвертый вход/выход вычислителя 104 перемещений на выдачу информации по шине данных 55.
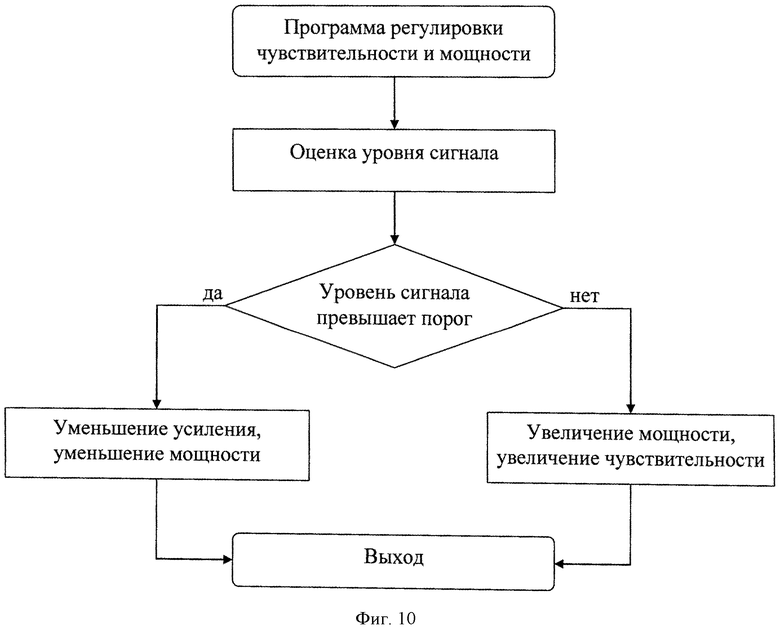
Для поддержания стабильной крутизны фронта восстановленного сигнала на задержке i·dt вычислительное устройство 15 после окончания каждого цикла излучения и накопления запускает подпрограмму автоматической регулировки усиления видеоусилителя 11 и мощности излученных радиоимпульсов посредством блока 17 регулировки усиления, блока 18 регулировки ослабления и источника 19 тока УН соответственно (фиг.10). Проводится оценка уровня восстановленного отраженного сигнала. Если уровень сигнала превышает пороговый, то производится уменьшение излучаемой мощности и усиления видеоусилителя 11, если не превышает порога - то увеличение.
После стабилизации крутизны фронта отраженного сигнала вычислительное устройство 15 по окончании считывания данных из БОЗУ 13 формирует сигнал 107 логической единицей, по которому вычислитель 104 перемещений переводится в режим обработки записанной из БОЗУ 13 информации, и проводит обработку данных, сканируя по диапазону задержек, определяя временные задержки цифровых сигналов.
Значение принятого сигнала Ui на задержке i·dt в цифровом виде можно определить из выражения:
Ui=ОЗУ{(imodM)·m+[i/M]},
где скобки {…} означают содержимое ячейки ОЗУ с данным номером; выражение (imodM) - остаток деления i на M; и скобка […] - целая часть числа; M=k(m-1)+1.
На фиг.9е) показан пример восстановленного сигнала для k=1, m=8.
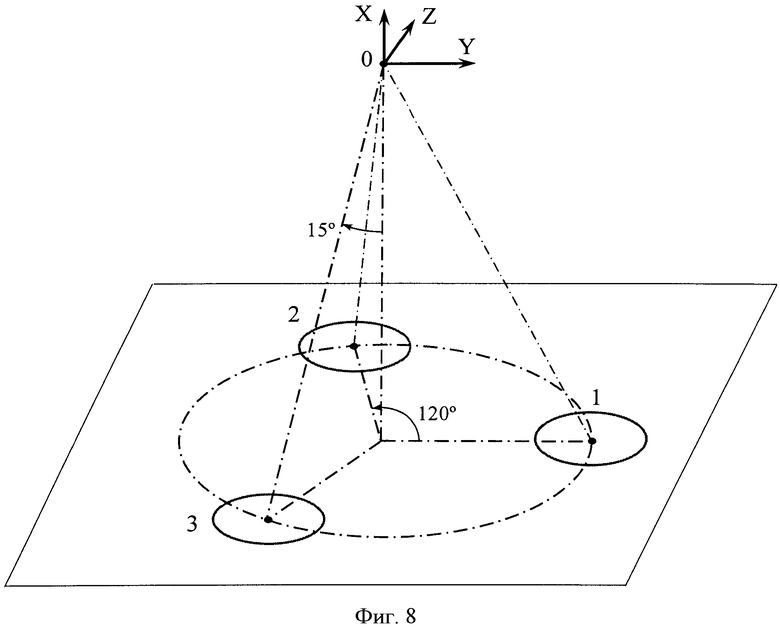
По найденным задержкам вычислительное устройство 15 определяет дальности по трем направлениям hi - это расстояния от точки 0 до точек 1, 2, 3 соответственно (фиг.8). Летательный аппарат расположен в точке 0. С ним связана система отсчета 0XYZ, оси которой направлены так, как показано на фиг.8.
Знание параметров трехлучевой приемопередающей антенны, а именно угла (отклонения лучей от оси 0X (15° для всех лучей) и приращения (угла поворота проекций лучей от оси 0Y в плоскости Y0Z (120°), и дальностей позволяет определить координаты (xj,yj,zj) точек 1, 2, 3 пересечения лучей с подстилающей поверхностью
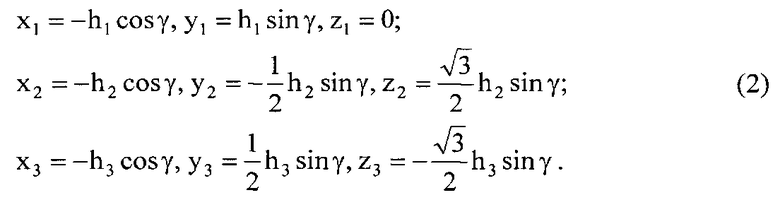
По координатам точек может быть найдено уравнение плоскости, аппроксимирующей подстилающую поверхность, из которого определяются кратчайшее расстояние до поверхности и углы наклона поверхности в связанной с летательным аппаратом системе координат.
Уравнение плоскости имеет вид
A·x+B·y+C·z+D=0.
Исходя из заданного диапазона углов эволюции и углов наклона траектории A≠0, следовательно, уравнение можно записать в виде
Введем обозначения: 



Точки 1, 2, 3, координаты которых определяются выражением (2), лежат в искомой плоскости, тогда получаем систему уравнений
Решая ее методом Крамера относительно неизвестных параметров b, c и d, получаем

Таким образом, коэффициенты a, b и c уравнения плоскости (3) найдены, уравнение плоскости примет вид

Вектор нормали к плоскости

Тогда прямая, проходящая через начало координат перпендикулярно плоскости, задается уравнением

Найдем координаты (x0,y0,z0) точки M0 пересечения этой прямой и плоскости. Они должны удовлетворять и уравнению прямой (6), и уравнению плоскости (4)

Решая систему уравнений (7), получаем

Геометрическая высота равна кратчайшему расстоянию от начала координат до плоскости, т.е. до точки M0, поэтому
Параллельно с вычислением высоты в вычислительном устройстве 15 вычислитель 104 перемещений производит вычисление составляющих вектора путевой скорости.
Для снижения времени измерения составляющих вектора путевой скорости в системе используется прямой метод измерения доплеровской частоты, который можно пояснить следующим образом.
Пусть точечный объект, расстояние до которого изменяется по закону
R(t)=R0+ΔR·cos(Ωt),
где R0 - среднее расстояние до отражателя;
ΔR - амплитуда колебания отражателя;
Ω - частота колебания отражателя, облучается монохроматическим сигналом
U(t)=cos(ωt),
где ω - несущая частота сигнала.
Отраженный сигнал описывается следующим выражением:

где Uro - амплитуда отраженного сигнала;
C - скорость света.
На выходе квадратурного смесителя, после умножения на низкочастотные составляющие выходного сигнала cos(ωt) и sin(ωt), отраженный сигнал будет иметь следующий вид:


где Uco - амплитуда косинусной составляющей сигнала;
Uso - амплитуда синусной составляющей сигнала.
Выразим расстояния в половинах длины волны, отбросив при этом одинаковую начальную фазу
Uc(t)=Uco·cos(2π·ΔR·cos(Ωt)),
Us(t)=-Uso·sin(2π·ΔR·cos(Ωt)).
Учитывая, что косинус - функция четная, а синус - нечетная, видим, что при положительных приращениях расстояния синусная составляющая отстает по фазе от косинусной, при отрицательных - опережает (фиг.11).
Пересечения косинусной и синусной составляющих при увеличении расстояния происходят на положительной полуволне косинусной составляющей с положительной производной, на отрицательной, соответственно, с отрицательной производной.
При уменьшении расстояния пересечения косинусной и синусной составляющих происходят на положительной полуволне косинусной составляющей с отрицательной производной, на отрицательной - с положительной. Каждое совпадение составляющих соответствует изменению расстоянию до цели на четверть длины волны.
Таким образом, подсчитывая число совпадений синусной и косинусной составляющих с учетом знаков за некоторый интервал времени можно оценить приращение дальности до цели за этот интервал.
Алгоритм вычисления приращений дальности следующий:
- вычисление разности Uc и Us и приращения ΔUc по формулам


- сравнение ΔUcs по формуле

где sign(U) - функция знака, sign(U)=1 при U>0, sign(U)=-1 при U<0;
- обнаружение перехода: при выполнении условий SIGNi<0 и 
Важно отметить, что рассмотренный метод обладает высокой чувствительностью к перемещениям. Так, если проекция перемещения на ось диаграммы направленности составляет 0,25λ, происходит изменение фазы квадратурных компонент сигнала на 180° и их пересечение (фиг.11). При горизонтальном перемещении L в плоскости, проходящей через ось ДНА с углом тангажа 90° проекция перемещения на ось ДНА La составляет La=Lsin(α), где α - угол отклонения оси ДНА от вертикали. Таким образом, чувствительность к горизонтальному перемещению (приращение счетчика пересечений на 1) составляет 
Блок-схема алгоритма поиска и сопровождения отраженного сигнала по доплеровской частоте представлена на фиг.12.
Проекция скорости на каждое из трех направлений (фиг.8) равна скалярному произведению вектора скорости и единичного вектора, задающего это направление
где j=1, 2, 3 - номер приемопередающего канала.
Запишем вектор скорости в виде
где Vx, Vy и Vz - проекции на оси связанной системы координат.
Единичные векторы, задающие каждый из 3-х лучей, запишем в виде

где γ - угол отклонения лучей от оси 0X, равный 15° для всех лучей;
α - приращение угла поворота проекций лучей от оси 0Y в плоскости Y0Z, α=120°.
Тогда получаем

Перемещение летательного аппарата вдоль направления на отражатель на расстояние, равное половине длины волны, приводит к изменению фазы сигнала на 2π. Поэтому можно записать
где X - длина волны;
Δφj - изменение фазы сигнала в j-м канале;
ΔRj - перемещение вдоль j-го направления.
Продифференцировав обе части по времени, получим
где 
Vj - скорость перемещения вдоль j-ro направления.
Скорость изменения фазы может быть определена путем подсчета количества пересечений Kj за единицу времени квадратурных составляющих сигнала в приемном канале. Поскольку на одном периоде колебаний присутствуют два совпадения составляющих, справедливо следующее соотношение:
Поскольку косинус - четная функция, а синус - нечетная, очевидно, что при положительных значениях частоты синусная составляющая отстает по фазе от косинусной, а при отрицательных - опережает. Таким образом, имеется возможность учитывать знак изменения фазы и, следовательно, направление перемещения.
Таким образом, имеем
а с учетом выражения (8), подставляя значение α=120°, получаем систему уравнений
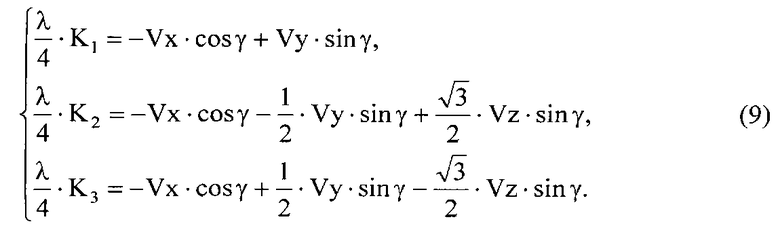
Решая ее методом Крамера, находим выражения для составляющих вектора скорости в связанной системе координат

Следует отметить, что определитель системы (9) зависит только от угла отклонения лучей от оси ОХ
При выбранном значении γ=15° он никогда не обращается в нуль, и система всегда имеет единственное решение.
После окончания вычисления составляющих вектора путевой скорости вычислитель 104 перемещений выдает сигнал 106 логической единицей в вычислительное устройство 15 на считывание информации из вычислителя 104 перемещений по шине данных 55.
После измерения высоты полета и составляющих вектора путевой скорости цикл измерения вышеуказанных параметров повторяется периодически.
Использование изобретения позволяет расширить функциональные возможности устройства, повысить точность измерения составляющих вектора скорости, уменьшить время, необходимое для измерения составляющих вектора скорости при малых перемещениях летательного аппарата.
ЛИТЕРАТУРА
1. Доплеровский измеритель составляющих вектора скорости, высоты и местной вертикали для вертолетов и космических аппаратов вертикальной посадки. Патент России №2083998.
2. РЛС непрерывного излучения с частотной модуляцией для одновременного измерения трех составляющих скорости и высоты. Фрайд. «Зарубежная электроника», 1964. №11, с.3.
3. Импульсно-фазовый измеритель толщины слоев разнородных жидкостей, а также их относительного изменения с повышенной точностью. Патент России №2188399.
4. Б.Ф. Высоцкий. Цифровые фильтры и устройства обработки сигналов на интегральных микросхемах, М., Радио и связь, 1984 г., стр.126, рис.4.23.
5. Антенны: (Современное состояние и проблемы)/Под ред. чл.-корр. АН СССР Л.Д. Бахраха и проф. Д.И. Воскресенского. - М.: Сов. радио, 1979 г.
6. Патент РФ №2188399 от 21.06.1999 г., кл. 7 G01F 23/284. Опубл. 21.06.1999 г.
7 Д.Л. Шило. Популярные цифровые микросхемы, Челябинск, 1989 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИМПУЛЬСНО-ДОПЛЕРОВСКИЙ РАДИОВЫСОТОМЕР | 2012 |
|
RU2522907C2 |
| ИМПУЛЬСНО-ДОПЛЕРОВСКИЙ РАДИОВЫСОТОМЕР | 2013 |
|
RU2552837C1 |
| КОРРЕЛЯЦИОННЫЙ ИЗМЕРИТЕЛЬ ВЫСОТЫ И СОСТАВЛЯЮЩИХ ВЕКТОРА ПУТЕВОЙ СКОРОСТИ | 2012 |
|
RU2498344C2 |
| ИМПУЛЬСНО-ДОПЛЕРОВСКАЯ РАДИОВЫСОТОМЕРНАЯ СИСТЕМА | 2012 |
|
RU2500001C1 |
| ИМПУЛЬСНО-ДОПЛЕРОВСКАЯ РАДИОВЫСОТОМЕРНАЯ СИСТЕМА | 2012 |
|
RU2515524C2 |
| РАДИОВЫСОТОМЕРНАЯ СИСТЕМА С АДАПТАЦИЕЙ К ГЛАДКОЙ ВОДНОЙ ПОВЕРХНОСТИ | 2015 |
|
RU2605442C1 |
| ИМПУЛЬСНО-ФАЗОВЫЙ ИЗМЕРИТЕЛЬ ТОЛЩИНЫ СЛОЕВ РАЗНОРОДНЫХ ЖИДКОСТЕЙ, А ТАКЖЕ ИХ ОТНОСИТЕЛЬНОГО ИЗМЕНЕНИЯ С ПОВЫШЕННОЙ ТОЧНОСТЬЮ | 1999 |
|
RU2188399C2 |
| РАДИОВЫСОТОМЕРНАЯ СИСТЕМА С АДАПТАЦИЕЙ К ГЛАДКОЙ ВОДНОЙ ПОВЕРХНОСТИ | 2017 |
|
RU2672098C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ИЗМЕРЕНИЯ ОТРАЖАТЕЛЬНЫХ СВОЙСТВ ОБЪЕКТОВ СЛОЖНОЙ ФОРМЫ В СВЧ ДИАПАЗОНЕ РАДИОВОЛН | 1997 |
|
RU2111506C1 |
| Устройство измерения составляющих вектора путевой скорости | 2019 |
|
RU2715740C1 |
Изобретение относится к области радиолокации и может быть использовано в автономных бортовых радиосистемах управления посадкой летательных аппаратов. Достигаемый технический результат - расширение функциональных возможностей за счет измерения составляющих вектора скорости. Сущность изобретения состоит в том, что в импульсно-фазовой радиовысотомерной системе используется прямой метод измерения доплеровской частоты путем подсчета числа ее периодов за заданное время. Для определения знака доплеровской частоты используется тот факт, что при смене знака доплеровской частоты изменяется знак разности фаз квадратурных составляющих. Импульсно-фазовая радиовысотомерная система содержит дискретно управляемый сверхвысокочастотный генератор, направленный ответвитель, импульсный модулятор, фазовращатель, управляемый аттенюатор, циркулятор, малошумящий усилитель высокой частоты, фазовый детектор, видеоусилитель, аналого-цифровой преобразователь, буферное оперативное запоминающее устройство, синхронизатор, вычислительное устройство, контроллер обмена, блок регулировки усиления, блок регулировки ослабления, источник тока, управляемый напряжением, трехлучевую приемопередающую антенну, антенный переключатель (АП), блок управления АП, вычислитель перемещений. Перечисленные средства определенным образом выполнены и соединены между собой. 12 ил.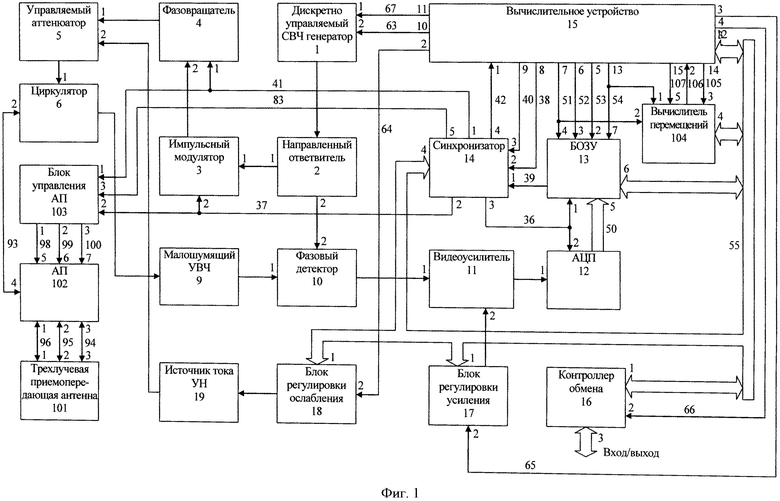
Импульсно-фазовая радиовысотомерная система, содержащая синхронизатор, аналого-цифровой преобразователь (АЦП), буферное оперативное запоминающее устройство (БОЗУ), направленный ответвитель, импульсный модулятор, фазовращатель, управляемый аттенюатор, циркулятор, малошумящий усилитель высокой частоты (УВЧ), фазовый детектор, видеоусилитель, блок регулировки усиления, блок регулировки ослабления, источник тока, управляемый напряжением (УН), контроллер обмена, вычислительное устройство, предназначенное для вычисления высоты, дискретно управляемый сверхвысокочастотный (СВЧ) генератор, выход которого соединен с входом направленного ответвителя, первый выход которого соединен с первым входом импульсного модулятора, второй вход которого соединен со вторым выходом синхронизатора, первый выход которого соединен с первым входом фазовращателя, второй вход которого соединен с выходом импульсного модулятора, а выход - с первым входом управляемого аттенюатора, выход которого соединен с первым входом циркулятора, выход которого соединен со входом малошумящего УВЧ, выход которого соединен с первым входом фазового детектора, второй вход которого соединен со вторым выходом направленного ответвителя, а выход - с первым входом видеоусилителя, второй вход которого соединен с выходом блока регулировки усиления, а выход - с первым входом АЦП, все выходы которого соединены со всеми пятыми входами БОЗУ, первый вход которого соединен со вторым входом АЦП и третьим выходом синхронизатора, четвертый выход которого соединен с первым входом вычислительного устройства, второй, третий, четвертый, пятый выходы которого соединены соответственно со вторыми входами блока регулировки ослабления и блока регулировки усиления, контроллера обмена, БОЗУ, шестой, седьмой и тринадцатый выходы - соответственно с третьим, четвертым и седьмым входами БОЗУ, десятый и одиннадцатый выходы - соответственно со вторым и первым входами дискретно управляемого СВЧ-генератора, восьмой и девятый выходы - соответственно со вторым и третьим входами синхронизатора, первый вход которого соединен с выходом БОЗУ, все шестые входы/выходы которого соединены по шине данных со всеми двенадцатыми входами/выходами вычислительного устройства, всеми первыми входами/выходами контроллера обмена, все третьи входы/выходы которого являются входами/выходами измерителя, а также - со всеми первыми входами блока регулировки усиления, всеми четвертыми входами синхронизатора, всеми первыми входами блока регулировки ослабления, выход которого соединен с входом источника тока УН, выход которого соединен со вторым входом управляемого аттенюатора, отличающаяся тем, что в нее введены трехлучевая приемопередающая антенна, антенный переключатель (АП), блок управления АП и вычислитель перемещений, предназначенный для вычисления составляющих вектора путевой скорости, при этом второй вход/выход циркулятора соединен с четвертым входом/выходом АП, первый, второй и третий входы/выходы которого соединены соответственно с первым, вторым и третьим входами/выходами трехлучевой приемопередающей антенны, а пятый, шестой и седьмой входы соединены соответственно с первым, вторым и третьим выходами блока управления АП, первый, второй и третий входы которого соединены соответственно с первым, вторым и пятым выходами синхронизатора, первый, второй, третий и пятый входы вычислителя перемещений соединены соответственно с тринадцатым, седьмым, четырнадцатым и пятнадцатым выходами вычислительного устройства, все четвертые входы/выходы соединены с шиной данных, а выход - со вторым входом вычислительного устройства.
| ИМПУЛЬСНО-ФАЗОВЫЙ ИЗМЕРИТЕЛЬ ТОЛЩИНЫ СЛОЕВ РАЗНОРОДНЫХ ЖИДКОСТЕЙ, А ТАКЖЕ ИХ ОТНОСИТЕЛЬНОГО ИЗМЕНЕНИЯ С ПОВЫШЕННОЙ ТОЧНОСТЬЮ | 1999 |
|
RU2188399C2 |
| СПОСОБ СНИЖЕНИЯ НИЖНЕЙ ГРАНИЦЫ ИЗМЕРЕНИЯ МАЛЫХ ВЫСОТ ДО НУЛЯ И УСТРОЙСТВО КОГЕРЕНТНОГО ИМПУЛЬСНО-ДОПЛЕРОВСКОГО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2008 |
|
RU2412450C2 |
| US 20090058714 A1, 05.03.2009 | |||
| US 20120313808 A1, 13.12.2012 | |||
| US 20100302088 A1, 02.12.2010 | |||
| US 6977611 B1, 20.12.2005 | |||

