Предлагаемое изобретение относится к области радиолокации, в частности бортовым измерителям высоты полета, и может быть использовано в импульсно-доплеровских радиовысотомерах для систем управления полетом летательных аппаратов.
Известен [1] импульсно-доплеровский радиовысотомер, содержащий передатчик со средствами излучения, приемник со средствами приема отраженных сигналов, вычислительную схему, которая измеряет высоту путем излучения импульсных зондирующих сигналов, приема, узкополосной обработки доплеровским фильтром отраженных сигналов, измерения времени задержки их распространения до отражающей поверхности и обратно. Для сохранения работоспособности в широком диапазоне высот и скоростей летательного аппарата период повторения импульсов и соответственно время сеанса излучения радиовысотомера приходится увеличивать, а полосу пропускания доплеровского фильтра заведомо расширять, что уменьшает соотношение сигнал/шум на выходе доплеровского фильтра, компенсировать которое можно либо повышением излучаемой мощности, либо увеличением времени сеанса излучения, как следствие, ухудшается скрытность излучения.
Известен [2] импульсный радиолокатор, в котором частота следования зондирующих импульсов зависит от измеряемой высоты, ее приходится понижать с увеличением высоты для сохранения работоспособности, что приводит к возрастанию времени сеанса излучения, как следствие, ухудшается скрытность излучения.
Известны [3, 4] импульсно-доплеровские радиолокационные станции, работающие с высокой частотой следования зондирующих импульсов, периодом излучения импульсов меньше максимально возможной задержки отраженных сигналов от цели, малым временем сеанса излучения при измерении дальности. Однако в этих станциях возникают проблемы, связанные с неоднозначностью отчетов дальности до цели, которые устраняют, например, двухчастотным способом устранения неоднозначности отчетов по дальности (например, [3], стр.375, рис.13.20), который позволяет обеспечить однозначное измерение дальности и стабильно работает только с целями, имеющими малую эффективную площадь рассеяния (например, при селекции движущихся целей, над спокойной водной поверхностью). Импульсно-доплеровские радиолокационные станции, как правило, работают с узкой диаграммой направленности антенны, имеющей следящую систему углового сканирования. Для учета влияния эволюции летательного аппарата радиовысотомеры работают в большинстве случаев с антеннами, имеющими широкую диаграмму направленности [5].
Как показано в [5] на странице 146, более шероховатой отражающей поверхности, при прочих равных условиях, соответствуют более широкая огибающая эхо-импульса и более широкий спектр флюктуации огибающей.
Над протяженной земной поверхностью (типа лес, пашня, взволнованная водная поверхность) двухчастотный способ устранения неоднозначности не учитывает влияния расширения огибающей отраженных импульсов на работу станции, что может привести к полной потере ее работоспособности из-за перекрытия по времени двух соседних сигналов дальности. Для сохранения работоспособности станции частоту следования импульсов приходится понижать, что увеличивает время сеанса излучения при измерении высоты и ухудшает скрытность излучения.
Наиболее близким по технической сущности является импульсно-фазовый измеритель толщины слоев разнородных жидкостей, а также их относительного изменения с повышенной точностью [6], содержащий синхронизатор, вычислительное устройство, аналого-цифровой преобразователь, фазовращатель, импульсный модулятор, управляемый аттенюатор, видеоусилитель, БОЗУ, блок регулировки усиления, блок регулировки ослабления, источник тока, управляемый напряжением, контроллер обмена, последовательно соединенные антенную систему, циркулятор, малошумящий УВЧ, фазовый детектор, направленный ответвитель, дискретно управляемый СВЧ генератор, выход которого соединен со входом направленного ответвителя, второй выход которого соединен со вторым входом фазового детектора, первый вход которого соединен с выходом малошумящего усилителя, вход которого соединен с выходом циркулятора, вход/выход которого подключен к антенной системе, а первый выход направленного ответвителя соединен с первым входом импульсного модулятора, второй вход которого соединен со вторым выходом синхронизатора, выход импульсного модулятора соединен со вторым входом фазовращателя, первый вход которого соединен с первым выходом синхронизатора, а выход - с первым входом управляемого аттенюатора, выход которого соединен со входом циркулятора, а второй вход - с выходом источника тока, управляемого напряжением, вход которого соединен с выходом блока регулировки ослабления, все первые входы которого соединены по шине данных со всеми первыми входами блока регулировки усиления, всеми шестыми входами БОЗУ, всеми первыми входами/выходами контроллера обмена, все третьи входы/выходы которого являются входами/выходами измерителя, а также всеми двенадцатыми входами вычислительного устройства, второй, третий, четвертый, пятый выходы которого соединены соответственно со вторыми входами блока регулировки ослабления, блока регулировки усиления, контроллера обмена, БОЗУ, а шестой, седьмой, тринадцатый выходы - соответственно с третьим, четвертым, седьмым входами БОЗУ, восьмой, девятый выходы - соответственно со вторым и третьим входами синхронизатора, десятый, одиннадцатый выходы - соответственно со вторым и первым входами дискретно управляемого СВЧ генератора, первый вход - с четвертым выходом синхронизатора, первый вход которого соединен с первым выходом БОЗУ, первый вход которого соединен с третьим выходом синхронизатора и вторым входом АЦП, все выходы которого соединены со всеми пятыми входами БОЗУ, а первый вход АЦП - с выходом видеоусилителя, первый вход которого соединен с выходом фазового детектора, второй вход - с выходом блока регулировки усиления.
Импульсно-фазовый измеритель излучает в направлении подстилающей поверхности и принимает короткие пакеты радиоимпульсов. При этом, радиоимпульсы в приемнике преобразуются в биполярные видеоимпульсы, огибающая которых флюктуирует по амплитуде с частотой, определяемой доплеровским сдвигом частоты сигналов, отраженных от подстилающей поверхности (фиг.1).
Недостаток импульсно-фазового измерителя заключается в том, что при увеличении диапазона измеряемых высот необходимо увеличивать период повторения, соответственно, длительность пакетов, либо мощность зондирующих радиоимпульсов, что ухудшает скрытность излучения.
Целью настоящего изобретения является расширение функциональных возможностей измерителя, повышение скрытности излучения и максимальной измеряемой высоты без увеличения излучаемой мощности.
Указанная цель достигается тем, что в импульсно-фазовый измеритель, содержащий синхронизатор, вычислительное устройство, аналого-цифровой преобразователь, фазовращатель, импульсный модулятор, управляемый аттенюатор, видеоусилитель, БОЗУ, блок регулировки усиления, блок регулировки ослабления, источник тока, управляемый напряжением, контроллер обмена, приемопередающую антенну, циркулятор, малошумящий УВЧ, фазовый детектор, направленный ответвитель, дискретно управляемый СВЧ генератор, выход которого соединен со входом направленного ответвителя, второй выход которого соединен со вторым входом фазового детектора, первый вход которого соединен с выходом малошумящего усилителя, вход которого соединен с выходом циркулятора, а первый выход направленного ответвителя соединен с первым входом импульсного модулятора, второй вход которого соединен со вторым выходом синхронизатора, выход импульсного модулятора соединен со вторым входом фазовращателя, первый вход которого соединен с первым выходом синхронизатора, а выход - с первым входом управляемого аттенюатора, выход которого соединен со входом циркулятора, а второй вход - с выходом источника тока, управляемого напряжением, вход которого соединен с выходом блока регулировки ослабления, все первые входы которого соединены по шине данных со всеми первыми входами блока регулировки усиления, всеми шестыми входами/выходами БОЗУ, всеми первыми входами/выходами контроллера обмена, все третьи входы/выходы которого являются входами/выходами измерителя, а также всеми двенадцатыми входами/выходами вычислительного устройства, второй, третий, четвертый, пятый выходы которого соединены соответственно со вторыми входами блока регулировки ослабления, блока регулировки усиления, контроллера обмена, БОЗУ, а шестой, седьмой, тринадцатый выходы - соответственно с третьим, четвертым, седьмым входами БОЗУ, восьмой, девятый выходы - соответственно со вторым и третьим входами синхронизатора, десятый, одиннадцатый выходы - соответственно со вторым и первым входами дискретно управляемого СВЧ генератора, первый вход - с четвертым выходом синхронизатора, первый вход которого соединен с выходом БОЗУ, первый вход которого соединен с третьим выходом синхронизатора и вторым входом АЦП, все выходы которого соединены со всеми пятыми входами БОЗУ, а первый вход АЦП - с выходом видеоусилителя, первый вход которого соединен с выходом фазового детектора, второй вход - с выходом блока регулировки усиления, вход/выход приемопередающей антенны соединен с входом/выходом циркулятора и осуществляется управление делителем с переменным коэффициентом деления (ДПКД) синхронизатора с помощью вычислителя, все двенадцатые входы/выходы вычислительного устройства соединены с четвертыми входами синхронизатора таким образом, что в направлении подстилающей поверхности излучают пачку зондирующих радиоимпульсов (фиг.2), причем, за время априорной задержки Та, задаваемой контроллером обмена, излучают N импульсов, период Tni повторения которых устанавливают равным сумме некоторой постоянной для данных N и Ta, величины Tn и переменной Tm, а величину Tn определяют в зависимости от N, Ta, величины Th зоны неопределенности задержки отраженного сигнала, длительности То сформированного прямого (наведенного) сигнала и диапазона Tm изменения периода (вобуляции), причем значения N и Tn определяют из решения системы уравнений:
принимают пачку отраженных от подстилающей поверхности радиоимпульсов, преобразуют видеоимпульсы в последовательность цифровых двоичных сигналов с периодом дискретезации Tk, запоминают эту последовательность синхронно с началом пачки излученных радиоимпульсов, и по окончании излучения определяют адрес ячейки памяти Aдр(k, Те), соотвествующий задержке k-того видеоимпульса пачки - Те, величина которой находится в диапазоне от априорного значения задержки Та до значения Та+Th и определяется из уравнения:
производят узкополосную доплеровскую фильтрацию цифровых двоичных сигналов, считываемых последовательно из ячеек памяти с адресом Aдр(k,Тc), накопление суммарного результата фильтрации по всем видеоимпульсам пачки при каждой величине оцениваемой задержки, принятие решения о наличии сигнала по превышению наперед заданного порога накопления и определение задержки.
При этом, время сеанса излучения сокращается за счет того, что такое же, как в прототипе, накопление отраженных сигналов, но уже согласованное с зоной неопределенности Th, достигается значительно быстрее, так как за время априорной задержки (соответствующей высоте полета, на которой производится измерение) излучается несколько импульсов с периодом, определяемым, как описано выше, который может быть значительно меньше задержки отраженного сигнала, а поскольку обработка сигнала происходит в нереальном масштабе времени без излучения, то значительно повышается скрытность излучаемых радиоимпульсов. Кроме того, использование при обработке последовательности цифровых двоичных сигналов памяти (в зависимости от скорости полета) перестройки параметров цифрового фильтра (центральной частоты и полосы пропускания) позволяет не расширять его полосу пропускания при высоких скоростях полета, перестраивая центральную частоту, и значительно сузить ее при малых скоростях полета летательного аппарата. Такая адаптация полосы пропускания фильтра по скорости позволяет при высоких скоростях полета сохранить верхний предел диапазона измеряемых высот неизменным.
Сопоставительный анализ с прототипом показывает, что заявляемый импульсно-доплеровский радиовысотомер отличается его связями с другими блоками. Таким образом, заявляемое устройство соответствует критерию изобретения - "новизна". Предлагаемое исполнение импульсно-доплеровского радиовысотомера неизвестно, приводит к повышению его полезных свойств - расширению функциональных возможностей, повышению скрытности излучения и максимальной измеряемой высоты без увеличения излучаемой мощности.
Это позволяет сделать вывод о соответствии технического решения критерию "существенные отличия".
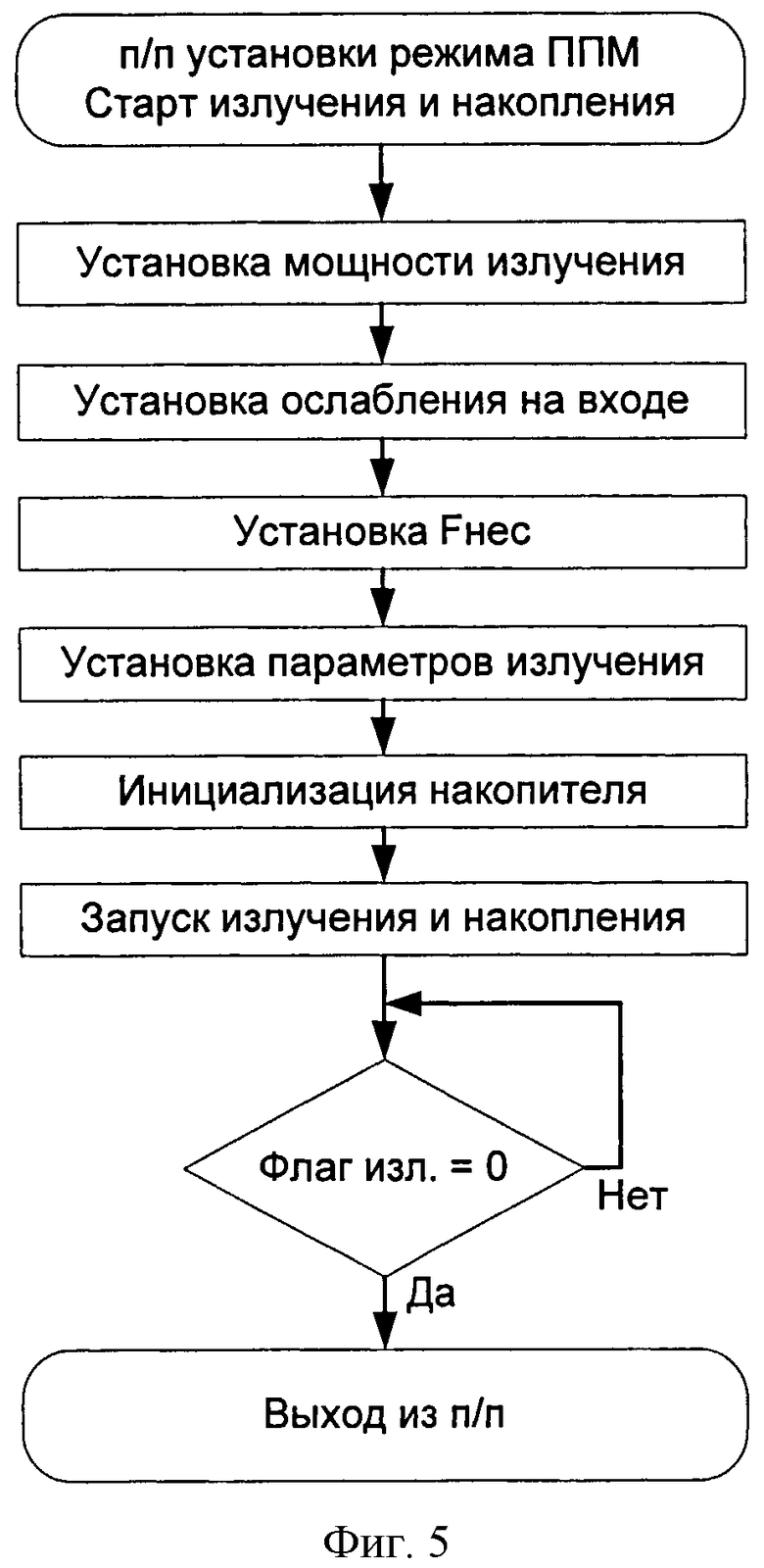
На фиг.1 приведена временная диаграмма пачек излученных радиоимпульсов и принятых видеосигналов, на фиг.2 - формирование импульсов запуска импульсного модулятора в зависимости от априорной задержки Та (для примера), на фиг.3 - функциональная схема импульсно-доплеровского радиовысотомера, на фиг.4 - функциональная схема синхронизатора, на фиг.5 приведена блок - схема алгоритма работы цифрового фильтра.
Предлагаемый импульсно-доплеровский радиовысотомер (фиг.3) содержит дискретно управляемый СВЧ генератор 1, направленный ответвитель 2, импульсный модулятор 3, фазовращатель 4, управляемый аттенюатор 5, циркулятор 6, приемопередающую антенну 7, малошумящий УВЧ 9, фазовый детектор 10, видеоусилитель 11, АЦП 12, БОЗУ 13, синхронизатор 14, вычислительное устройство 15, контроллер 16 обмена, блок 17 регулировки усиления, блок 18 регулировки ослабления, источник 19 тока, управляемый напряжением.
При этом, выход дискретно управляемого СВЧ генератора 1 соединен со входом направленного ответвителя 2, первый выход которого подключен к первому входу импульсного модулятора 3, второй вход которого подключен ко второму выходу синхронизатора 14, первый выход которого соединен с первым входом фазовращателя 4, второй вход которого соединен с выходом импульсного модулятора 3, а выход - с первым входом управляемого аттенюатора 5, выход которого соединен с первым входом циркулятора 6, второй вход/выход - со входом/выходом приемопередающей антенны 7, а выход циркулятора 6 соединен со входом малошумящего УВЧ 9, выход которого соединен с первым входом фазового детектора 10, второй вход которого соединен со вторым выходом направленного ответвителя 2, а выход - с первым входом видеоусилителя 11, второй вход которого соединен с выходом блока 17 регулировки усиления, а выход - с первым входом АЦП 12, все выходы которого соединены со всеми пятыми входами БОЗУ 13, первый вход которого соединен со вторым входом АЦП 12 и третьим выходом синхронизатора 14, четвертый выход которого соединен с первым входом вычислительного устройства 15, второй, третий, четвертый, пятый выходы которого соединены соответственно со вторыми входами блока 18 регулировки ослабления, блока 17 регулировки усиления, контроллера 16 обмена, БОЗУ 13, шестой, седьмой, тринадцатый выходы - соответственно с третьим, четвертым, седьмым входами БОЗУ 13, десятый, одиннадцатый выходы - соответственно со вторым и первым входами дискретно управляемого СВЧ генератора 1, восьмой, девятый выходы - соответственно со вторым и третьим входами синхронизатора 14, первый вход которого соединен с выходом БОЗУ 13, все шестые входы/выходы которого по шине данных соединены со всеми двенадцатыми входами/выходами вычислительного устройства 12, всеми первыми входами/выходами контроллера 16 обмена, все третьи входы/выходы которого являются входами/выходами импульсно-доплеровского радиовысотомера, а также - со всеми первыми входами блока 17 регулировки усиления, всеми четвертыми входами синхронизатора 14, всеми первыми входами блока 18 регулировки ослабления, выход которого соединен со входом источника 19 тока, управляемого напряжением, выход которого соединен со вторым входом управляемого аттенюатора 5, вход/выход приемопередающей антенны 7 соединен с входом/выходом циркулятора 6.
Импульсно-доплеровский радиовысотомер (РВ) работает следующим образом.
После подачи питания на РВ вычислительное устройство 15 проводит сигналом 40 начальную установку триггера 28 флага излучения синхронизатора 14 (фиг.4), сигналами 65 и 64 записывает нулевое значение усиления и ослабления в блоки 17 и 18 регулирования усиления и ослабления (Nус=0, Nосл=0), записывает сигналами 52 и 53 по шине данных 55 в счетчик 44 адреса ОЗУ БОЗУ 13 нулевое значение кода (устанавливается тем самым низкий логический уровень сигнала 39 - окончание режима излучения и накопления), проводит опрос контроллера 16 обмена с внешними системами, который переводит измеритель в режим измерения задержки отраженного от подстилающей поверхности сигнала, устанавливает сигналами 63 и 67 несущую частоту СВЧ - генератора 1 на середину рабочего диапазона.
После этого вычислительное устройство 15 запускает подпрограмму установки параметров приемопередающего модуля (ППМ) и старта излучения и накопления. Алгоритм работы подпрограммы приведен на фиг.5. Подпрограмма устанавливает несущую частоту Fнес на дискретно управляемом СВЧ-генераторе 1, записывает в блоки 17 и 18 регулировки усиления и ослабления значения усиления и ослабления, записывает нулевое значение кода в счетчик 44 адреса ОЗУ БОЗУ, запускает таймер на время tуст.ппм - время установки параметров в ППМ (дискретно управляемый СВЧ - генератор 1, направленный ответвитель 2, импульсный модулятор 3, фазовращатель 4, управляемый аттенюатор 5, малошумящий УВЧ 9, фазовый детектор 10, видеоусилитель 11), после чего проводится запуск режима излучения и накопления, анализ флага излучения 42.
Через циркулятор 6, приемопередающую антенну 7 (вход/выход 2) обеспечивается излучение радиоимпульсов по направлению к подстилающей поверхности.
Принятые от подстилающей поверхности приемопередающей антенны 7 радиоимпульсы через циркулятор 6 поступают на малошумящий УВЧ 9, фазовый детектор 10, детекируются, видеосигналы усиливаются в видеоусилителе 11, преобразуются в цировую форму в АЦП12 и записываются в БОЗУ 13.
По окончании работы подпрограммы вычислительное устройство 15 считывает данные БОЗУ 13, после чего проводит обработку данных, сканируя по диапазону задержек, определяя временную задержку цифровых сигналов от подстилающей поверхности.
Излучение и тактирование АЦП 12 и запись в БОЗУ 13 начинаются в момент времени t0 (фиг.6) [3]. Радиоимпульсы излучаются по тактам с номерами 0, km+1, 2km+3, …, nk(m+1), … (фиг.6а, 6б), где m - параметр нониуса, k - расширитель временного диапазона для сигнала и n - номер излучения, Tизл - период тактовых импульсов.
Преобразование принятого сигнала (фиг.6в) в АЦП 12 и запись в БОЗУ 13 проводится по каждому такту с периодом Тозу (фиг.6г, 6д). Если выполняется условие совпадения фронтов тактовых импульсов излучения и тактирования АЦП 12 и БОЗУ 13:

Условие (1) можно записать в виде:

где Fизл=1/Tизл - частота тактовых импульсов излучения; Fозу=1./Tозу - частота тактовых импульсов АЦП 12 и БОЗУ 13.
Если второе и последующие излучения выдавать в моменты n*(km+1)*Tизл, то следующий такт АЦП 12 и БОЗУ 13 придет в момент n*(k(m-1)+1)*Tозу с задержкой dtn, то из уравнения:
n*(km+1)*Tизл+dtn=n*(k(m-1)+1)*Tозу
можно показать, что п-тое излучение начинается раньше n*(k(m-1)+1) тактового импульса АЦП 12 и БОЗУ 13 на величину:
dtn=n*Tозу/m.
Отсюда получаем, что для восстановления принятого сигнала с шагом Tозу/m необходимо Nизл=m, а объем БОЗУ 13 Lозу определяется из уравнения:
m*(km+1)*Tизл=Lозу*Tозу,
тогда объем БОЗУ 13, необходимой для восстановления принятого сигнала, равен Lозу=(km+1)(m-1).
Выше проведенные рассуждения позволяют получить, что для восстановления значения принятого сигнала на задержке i*dt в цифровом виде можно вывести выражение:
Ui=ОЗУ{(i mod M)*m+[i/M]},
где: скобки {…} означают содержимое ячейки ОЗУ с данным номером, выражение (i mod M) - остаток от деления i на М, и скобка […] - целая часть числа, М=k(m-1)+1. На фиг.6е показан пример восстановленного сигнала для k=1, m=8.
При отражении от подстилающей поверхности изменение ослабления отраженных сигналов на входе малошумящего УВЧ 9 может составлять порядка 30 дБ, что приводит к флюктуациям амплитуды и изменению крутизны фронта отраженного сигнала и, как следствие, к дополнительной погрешности измерения задержки отраженного сигнала и высоты полета летательного аппарата.
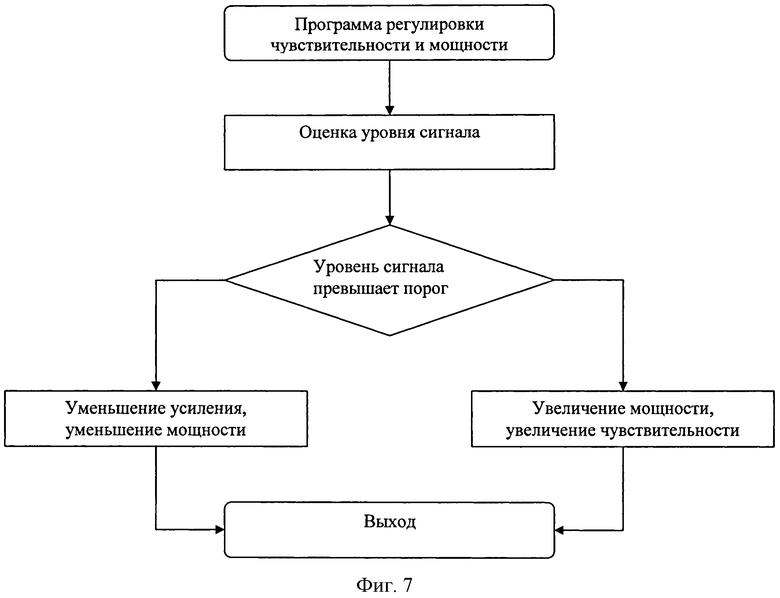
Для поддержания стабильной крутизны фронта восстановленного сигнала на задержке i*dt вычислительное устройство 15 запускает после окончания каждого цикла излучения и накопления подпрограмму автоматической регулировки усиления видеоусилителя 11 и мощности излученных радиоимпульсов посредством блока 17 регулировки усиления, блока 18 регулировки усиления и источника 19 тока УН соответственно (фиг.7). Проводится оценка уровня восстановленного отраженного сигнала. Если уровень сигнала превышает пороговый, то производится уменьшение излучаемой мощности и усиления видеоусилителя 11, если не превышает порога, то увеличение.
После стабилизации крутизны фронта отраженного сигнала (примерно 5-6 излученных пакетов радиоимпульсов) вычислительное устройство 15 выдает результат измеренной высоты полета в контроллер обмена 16.
Если измеряемая высота становится выше некоторой высоты Hтек (текущая высота), когда энергетический потенциал РВ уменьшается до критического значения, при котором режим измерения высоты может давать большие погрешности, РВ программно посредством вычислительного устройства 15 включает режим доплеровской фильтрации для измерения высоты.
После включения РВ на высоте выше Hтек вычислительное устройство 15 проводит сигналом 40 (фиг.4) начальную установку триггера 28 флага излучения синхронизатора 14, сигналом 83 начальную установку регистра 82 сдвига блока 7 управления АП, сигналами 65 и 64 записывает нулевое значение усиления и ослабления в блоки 17 и 18 регулирования усиления и ослабления (Nус=0, Nосл=0), записывает сигналами 52 и 53 по шине данных 55 в счетчик 44 адреса ОЗУ БОЗУ 13 нулевое значение кода (устанавливается тем самым низкий логический уровень сигнала 39-окончание режима излучения и накопления), проводит опрос контроллера 16 обмена с внешними системами (который задает априорное значение задержки Та), по шине 55 устанавливает коэффициент деления ДПКД 32 по входам dN0, dN1, dA [7] (соответственно период повторения импульсов запуска импульсного модулятора 3) в зависимости от априорной задержки Та и переводит РВ в режим измерения задержки отраженного от подстилающей поверхности сигнала, устанавливает сигналами 63 и 67 несущую частоту СВЧ-генератора 1 на середину рабочего диапазона.
После этого вычислительное устройство 15 запускает подпрограмму установки параметров приемопередающего модуля (ППМ) и старта излучения и накопления, после чего проводится запуск режима излучения и накопления, анализ флага излучения 42.
В направлении подстилающей поверхности излучаются пачки зондирующих радиоимпульсов, причем, в зависимости от значения априорной высоты, записываемой из контроллера обмена 16 в вычислительное устройство 15, определяющего режим работы синхронизатора 14, который управляет импульсным модулятором 3, открывающийся (за время задержки отраженного сигнала) на излучение N импульсов с периодом Tui, определяемым суммой некоторой постоянной для данных N, Та величины Тn и переменной Тm, а величину Тn определяют в зависимости от N, Та, величины Th зоны неопределенности задержки отраженного сигнала (диапазона поиска сигнала), диапазона Тm изменения периода (вобуляции), длительности То сформированного прямого (наведенного) сигнала на входе аналого-цифрового преобразователя 12, принимают пачку отраженных от подстилающей поверхности радиоимпульсов, преобразуют видеоимпульсы с выхода видеоусилителя 11 в аналого-цифровом преобразователе 12 в последовательность цифровых двоичных сигналов с периодом дискретизации Tk, запоминают в БОЗУ 13 синхронно с началом пачки излученных радиоимпульсов, и по окончании излучения, вычислительное устройство 15 определяет адрес ячейки памяти Aдр(k, Тc), производит узкополосную доплеровскую фильтрацию цифровых двоичных сигналов, считываемых последовательно из ячеек памяти БОЗУ 13, накапливает суммарный результат фильтрации по всем видеоимпульсам пачки при каждой величине оцениваемой задержки, в соответствии с заданной программой принимает решение о наличии сигнала по превышению наперед заданного порога накопления и определяет задержку отраженного сигнала.
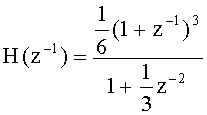
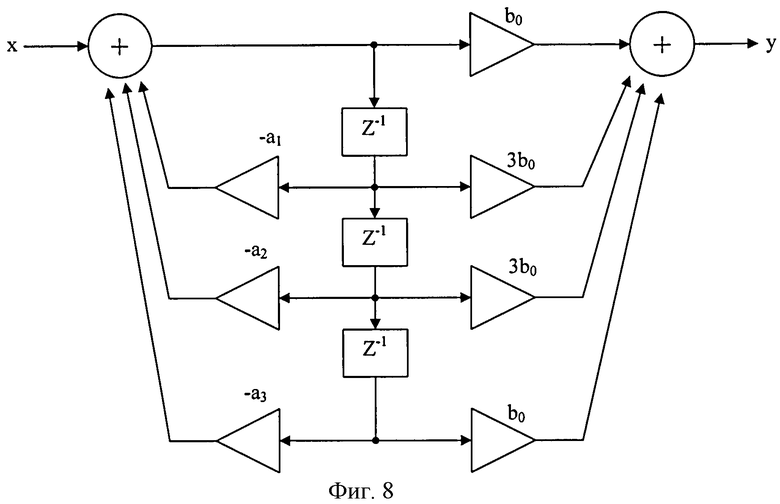
Для осуществления доплеровской фильтрации (фиг.8) используется цифровой фильтр низких частот, прототипом которого выбран широко известный нормированный аналоговый фильтр Баттерворта 3-го порядка с передаточной функцией вида [8]:
Для перехода к цифровому фильтру используется билинейное преобразование с подстановкой вида
В результате выражение для передаточной функции принимает вид
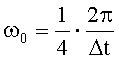
Если сигнал оцифрован с периодом Δt, то частота среза данного фильтра определяется выражением
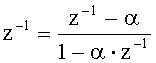
Для получения цифрового фильтра низких частот с заданной частотой среза ωс выполняется преобразование полосы пропускания с помощью подстановки
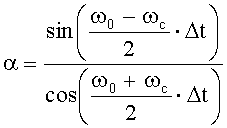
После выполнения всех преобразований передаточная функция доплеровского фильтра записывается в виде
где коэффициенты фильтра определяются выражениями
Алгоритм фильтрации описывается разностным уравнением
yn=b0xn+3b0xn-1+3b0xn-2+b0xn-3-a1yn-1-a2yn-2-a3yn-3,
где xn - значения сигнала на входе фильтра,
yn - выходные значения сигнала.
Вычислительное устройство 15 сравнивает выходные значения сигналов с порогом и если накопленная сумма меньше порога, то увеличивает (без излучения) дискрет поиска Ncm на один шаг и повторяет в полном объеме режим обработки цифровых двоичных сигналов, обеспечивая тем самым поиск сигнала в диапазоне Th, если накопленная сумма превышает порог, то останавливает обработку и выдает значение найденной высоты Hрв на выход контроллера обмена 16:
Hрв=Ncm*2*С*Tk-ΔНсм,
где: С - скорость света,
ΔНсм - абсолютная величина смещения оценки измеряемой высоты [5].
Если отраженный от подстилающей поверхности сигнал не обнаружен, то вновь запускается подпрограмма установки параметров приемопередающего модуля (ППМ) и старта излучения и накопления, после чего проводится запуск режима излучения и накопления, запоминание отраженных сигналов в БОЗУ 13 синхронно с началом пачки излученных радиоимпульсов, и по окончании излучения, вычислительное устройство 15 определяет адрес ячейки памяти Aдр(k, Тc) путем узкополосной доплеровской фильтрации цифровых двоичных сигналов, считываемых последовательно из ячеек памяти БОЗУ 13, накапливает суммарный результат фильтрации по всем видеоимпульсам пачки при каждой величине оцениваемой задержки, в соответствии с заданной программой принимает решение о наличии сигнала по превышению наперед заданного порога накопления и определения задержки отраженного сигнала.
По предложенному техническому решению разработана принципиальная схема и изготовлен РВ с малым временем сеанса излучения, в котором при обработке цифровых сигналов памяти в зависимости от априорной скорости полета Va перестраиваются параметры цифрового фильтра (центральная частота и полоса пропускания), что позволяет сделать обработку более оптимальной и, как следствие, повысить максимальную измеряемую высоту без увеличения излучаемой мощности и сократить время сеанса на излучение в широком диапазоне скоростей летательного аппарата [9].
Литература
1. Патент Франции №2.120.208.1972
2. Патент Франции №2.596.873.1988
3. Григорина-Рябова В.В. Радиолокационные устройства. М., Советское радио, 1970 г.
4. Сколник М., Трофимова К.Н. Радиолокационные устройства и системы. М., Советское радио - 1979 г.
5. Жуковский А.П., Оноприенко Е.И., Чижов В.И. Теоретические основы радиовысометрии. М., Советское радио - 1979 г.
6. Патент РФ №2188399 от 21.06.1999 г., кл. 7G01F 23/284. Опубл. 21.06.1999 г.
7. Пухальский Г.И., Новосельцева Т.Я., Проектирование дискретных устройств на интегральных микросхемах. М., Радио и связь - 1990 г., 274 с.
8. Гольденберг Л.М., Матюшкин Б.Д., Полек М.Н. Цифровая обработка сигналов. Учебное пособие для высших учебных заведений, М., Радио и связь - 1990, 2560.
9. Радиовысотометрия - 2010. Сборник трудов третьей Всероссийской научно-технической конференции, Каменск-Уральский, 19-21 октября 2010 г., 71 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИМПУЛЬСНО-ДОПЛЕРОВСКАЯ РАДИОВЫСОТОМЕРНАЯ СИСТЕМА | 2012 |
|
RU2500001C1 |
| ИМПУЛЬСНО-ДОПЛЕРОВСКИЙ РАДИОВЫСОТОМЕР | 2013 |
|
RU2552837C1 |
| ИМПУЛЬСНО-ДОПЛЕРОВСКАЯ РАДИОВЫСОТОМЕРНАЯ СИСТЕМА | 2012 |
|
RU2515524C2 |
| ИМПУЛЬСНО-ФАЗОВАЯ РАДИОВЫСОТОМЕРНАЯ СИСТЕМА | 2013 |
|
RU2551448C1 |
| КОРРЕЛЯЦИОННЫЙ ИЗМЕРИТЕЛЬ ВЫСОТЫ И СОСТАВЛЯЮЩИХ ВЕКТОРА ПУТЕВОЙ СКОРОСТИ | 2012 |
|
RU2498344C2 |
| РАДИОВЫСОТОМЕРНАЯ СИСТЕМА С АДАПТАЦИЕЙ К ГЛАДКОЙ ВОДНОЙ ПОВЕРХНОСТИ | 2015 |
|
RU2605442C1 |
| РАДИОВЫСОТОМЕРНАЯ СИСТЕМА С АДАПТАЦИЕЙ К ГЛАДКОЙ ВОДНОЙ ПОВЕРХНОСТИ | 2017 |
|
RU2672098C1 |
| ИМПУЛЬСНО-ФАЗОВЫЙ ИЗМЕРИТЕЛЬ ТОЛЩИНЫ СЛОЕВ РАЗНОРОДНЫХ ЖИДКОСТЕЙ, А ТАКЖЕ ИХ ОТНОСИТЕЛЬНОГО ИЗМЕНЕНИЯ С ПОВЫШЕННОЙ ТОЧНОСТЬЮ | 1999 |
|
RU2188399C2 |
| Устройство измерения составляющих вектора путевой скорости | 2019 |
|
RU2715740C1 |
| СПОСОБ СНИЖЕНИЯ НИЖНЕЙ ГРАНИЦЫ ИЗМЕРЕНИЯ МАЛЫХ ВЫСОТ ДО НУЛЯ И УСТРОЙСТВО КОГЕРЕНТНОГО ИМПУЛЬСНО-ДОПЛЕРОВСКОГО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2008 |
|
RU2412450C2 |

Изобретение может быть использовано в импульсно-доплеровских радиовысотомерах (РВ). Достигаемый технический результат - расширение функциональных возможностей, повышение скрытности излучения и максимальной измеряемой высоты без увеличения излучаемой мощности. Сущность изобретения состоит в том, что в направлении подстилающей поверхности излучают пачку зондирующих радиоимпульсов, причем число излучаемых радиоимпульсов (ИР) и период их повторения программно выбираются так, чтобы обеспечить максимальное количество ИР за время априорной задержки (АЗ), задаваемой контроллером обмена (КО), и одновременно исключить неоднозначность измерения высоты и попадание излученного сигнала в зону неопределенности, в которой производится поиск отраженного сигнала, принимают пачку отраженных от подстилающей поверхности радиоимпульсов, преобразуют видеоимпульсы в последовательность цифровых двоичных сигналов (ЦДС) с частотой дискретизации, запоминают синхронно с началом пачки ИР, и, по окончании излучения, определяют адрес ячейки памяти, соответствующий АЗ отраженного сигнала относительно начала пачки излучения, производят узкополосную доплеровскую фильтрацию ЦДС, считываемых последовательно из ячеек памяти в диапазоне поиска адресов памяти, накапливают суммарный результат фильтрации по всем цифровым двоичным сигналам принимаемой пачки при каждой величине оцениваемой задержки, принимают решение о наличии сигнала по превышению наперед заданного порога накопления, определяют задержку отраженного сигнала относительно начала пачки ИР, выдают информацию об измеренной высоте на выход РВ через КО. 8 ил.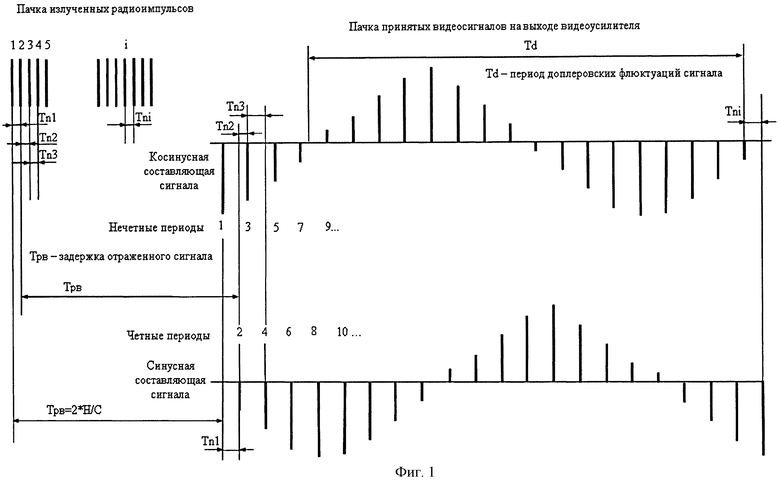
Импульсно-доплеровский радиовысотомер, содержащий синхронизатор, вычислительное устройство, аналого-цифровой преобразователь (АЦП), фазовращатель, импульсный модулятор, управляемый аттенюатор, видеоусилитель, буферное оперативное запоминающее устройство (БОЗУ), блок регулировки усиления, блок регулировки ослабления, источник тока, управляемый напряжением, контроллер обмена, приемопередающую антенну, циркулятор, малошумящий усилитель высокой частоты (УВЧ), фазовый детектор, направленный ответвитель, дискретно управляемый сверхвысокочастотный (СВЧ) генератор, выход которого соединен с входом направленного ответвителя, второй выход которого соединен со вторым входом фазового детектора, первый вход которого соединен с выходом малошумящего усилителя, вход которого соединен с выходом циркулятора, а первый выход направленного ответвителя соединен с первым входом импульсного модулятора, второй вход которого соединен со вторым выходом синхронизатора, выход импульсного модулятора соединен со вторым входом фазовращателя, первый вход которого соединен с первым выходом синхронизатора, а выход - с первым входом управляемого аттенюатора, выход которого соединен с первым входом циркулятора, а второй вход управляемого аттенюатора - с выходом источника тока, управляемого напряжением, вход которого соединен с выходом блока регулировки ослабления, все первые входы которого соединены по шине данных со всеми первыми входами блока регулировки усиления, всеми шестыми входами/выходами БОЗУ, всеми первыми входами/выходами контроллера обмена, все третьи входы/выходы которого являются входами/выходами радиовысотомера, а также всеми двенадцатыми входами/выходами вычислительного устройства, второй, третий, четвертый, пятый выходы которого соединены соответственно со вторыми входами блока регулировки ослабления, блока регулировки усиления, контроллера обмена, БОЗУ, а шестой, седьмой, тринадцатый выходы - соответственно с третьим, четвертым, седьмым входами БОЗУ, восьмой, девятый выходы - соответственно со вторым и третьим входами синхронизатора, десятый, одиннадцатый выходы - соответственно со вторым и первым входами дискретно управляемого СВЧ генератора, первый вход - с четвертым выходом синхронизатора, первый вход которого соединен с выходом БОЗУ, первый вход которого соединен с третьим выходом синхронизатора и вторым входом АЦП, все выходы которого соединены со всеми пятыми входами БОЗУ, а первый вход АЦП - с выходом видеоусилителя, первый вход которого соединен с выходом фазового детектора, второй вход - с выходом блока регулировки усиления, вход/выход приемопередающей антенны соединен с входом/выходом циркулятора, отличающийся тем, что осуществляют управление делителем с переменным коэффициентом деления (ДКПД) синхронизатора с помощью вычислительного устройства, при этом все двенадцатые входы/выходы вычислительного устройства соединены с четвертыми входами синхронизатора.
| ИМПУЛЬСНО-ФАЗОВЫЙ ИЗМЕРИТЕЛЬ ТОЛЩИНЫ СЛОЕВ РАЗНОРОДНЫХ ЖИДКОСТЕЙ, А ТАКЖЕ ИХ ОТНОСИТЕЛЬНОГО ИЗМЕНЕНИЯ С ПОВЫШЕННОЙ ТОЧНОСТЬЮ | 1999 |
|
RU2188399C2 |
| СПОСОБ СНИЖЕНИЯ НИЖНЕЙ ГРАНИЦЫ ИЗМЕРЕНИЯ МАЛЫХ ВЫСОТ ДО НУЛЯ И УСТРОЙСТВО КОГЕРЕНТНОГО ИМПУЛЬСНО-ДОПЛЕРОВСКОГО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2008 |
|
RU2412450C2 |
| СИСТЕМА ОЦЕНКИ ТОЧНОСТНЫХ ХАРАКТЕРИСТИК БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2006 |
|
RU2314553C1 |
| ДОПЛЕРОВСКИЙ ИЗМЕРИТЕЛЬ ПУТЕВОЙ СКОРОСТИ | 2007 |
|
RU2334995C1 |
| US 5549477 A, 27.08.1996 | |||
| WO 9524706 A1, 14.09.1995 | |||
| US 7119732 B1, 10.10.2006 | |||
| EP 1860455 B1, 27.05.2009 | |||

