Изобретение относится к системам радиосвязи, в частности к способу и устройству для определения местонахождения абонентского устройства в системе радиосвязи с многостанционным доступом с кодовым разделением каналов (МДКР).
В системе радиосвязи часто желательно определить местонахождение вызывающего абонента. Эта технология используется службой спасения, вызываемой по номеру 911 и оказывающей услуги полиции /пожарной команды/ скорой помощи вызывающему абоненту. К другим применениям можно отнести поиск злоумышленников, полицейские расследования и т.п.
Существовавшие до настоящего времени сотовые системы связи обладали ограниченными возможностями в этом отношении. Например, в системе сотовой радиосвязи стандарта AMPS (Advanced Mobile Phone System - Система подвижной телефонной связи) местонахождение абонента можно определить в пределах ячейки путем определения, антенна какой базовой станции была использована для обслуживания данного абонента. Однако ячейка может иметь радиус до 3 - 5 миль (4,8 - 8,0 км), что делает такую информацию практически бесполезной. Учитывая, что сейчас многие ячейки плотно заселенных городских территорий стали меньше и многие ячейки городских окраин делятся на сектора и при этом используются секторные антенны, чтобы ограничить зону обслуживания канала только одним сектором ячейки, зоны обслуживания ячейки становятся меньше. Однако площадь даже таких ячеек меньшего размера может все же быть больше одной квадратной мили (2,6 км2), что также делает определение местонахождения абонента практически нецелесообразным во многих случаях. Другие системы радиосвязи, например системы стандартов USDS (US Digital Cellular - Цифровая сотовая связь США) и GSM (Group Speciale Mobile - специальная подвижная связь), используют такой же способ идентификации ячейки или сектора и поэтому не имеют преимуществ по сравнению с системой AMPS.
Несмотря на то, что существуют и другие альтернативные методы определения местонахождения, например использования блоков глобальной спутниковой системы радиоопределения (GPS) в абонентском устройстве или использования триангуляции для передающего абонентского устройства, эти и аналогичные решения слишком неэкономичны для их использования большинством абонентов или в случае триангуляции требуют использования других специальных дорогостоящих и требующих много времени ресурсов.
Следовательно, существует потребность в усовершенствованном, экономичном решении, позволяющем определять местонахождение абонентов в системе радиосвязи.
В дальнейшем изобретение поясняется описанием вариантов его выполнения со ссылками на сопровождающие чертежи, на которых представлено следующее:
фиг. 1 - упрощенная схема сотовой системы радиосвязи, в которой может быть использовано настоящее изобретение;
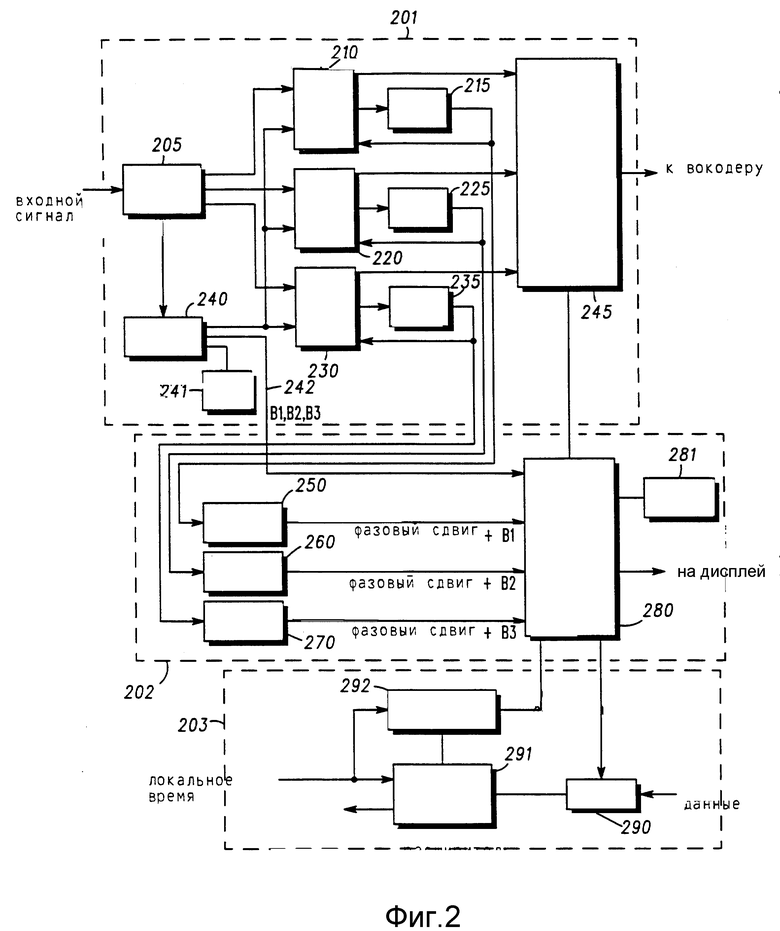
фиг. 2 - структурная схема МДКР-приемника абонентского устройства согласно настоящему изобретению;
фиг. 3 - схема, иллюстрирующая определение местонахождения абонентского устройства МДКР согласно настоящему изобретению;
фиг. 4 - схема, иллюстрирующая временную последовательность используемого для определения задержки распространения сигнала для определения местонахождения абонентского устройства МДКР согласно настоящему изобретению;
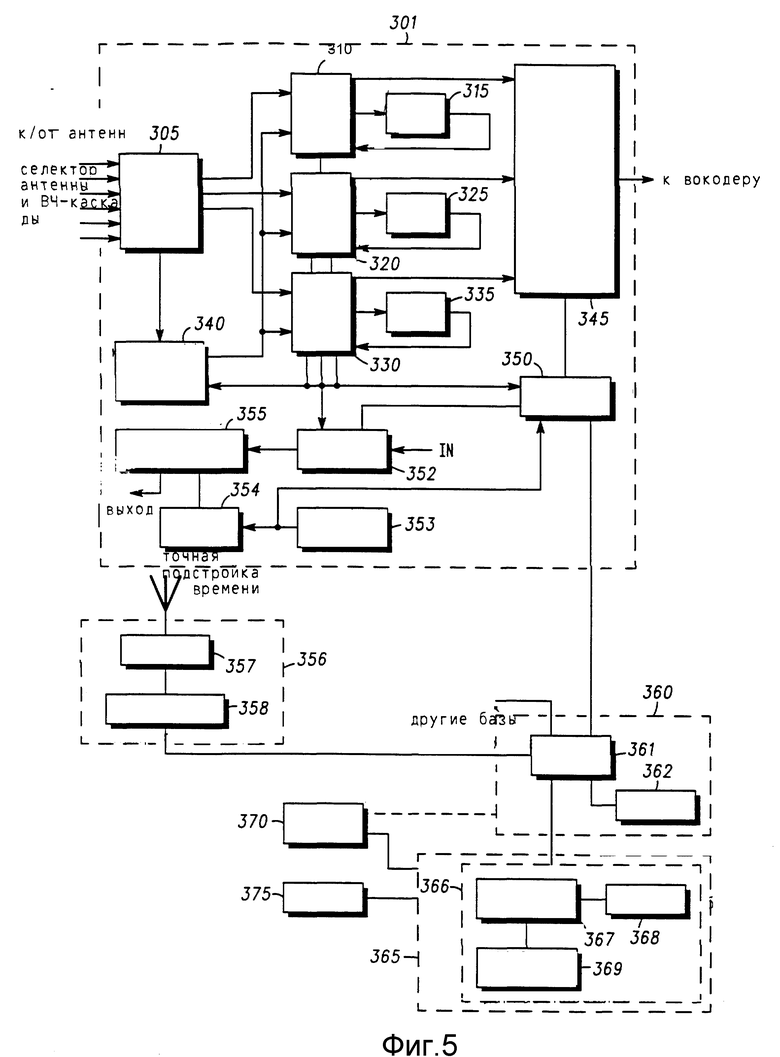
фиг. 5 - структурная схема МДКР-приемника базовой станции согласно настоящему изобретению;
фиг. 6 - временная диаграмма, иллюстрирующая интервалы времени распространения и задержки, используемые для вычисления местонахождения абонента, согласно варианту осуществления изобретения;
фиг. 7 - блок-схема последовательности операций способа, посредством которого абонент измеряет сигналы базовой станции, согласно варианту осуществления изобретения;
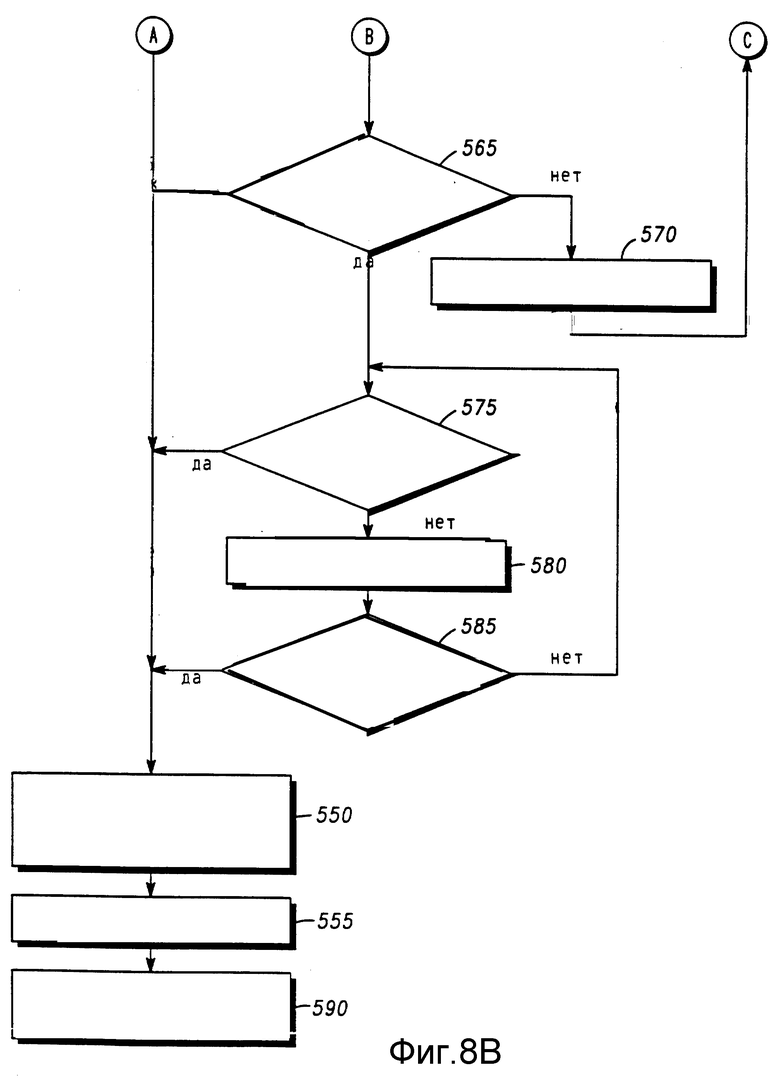
фиг. 8 - блок-схема последовательности операций способа, посредством которого базовая станция измеряет сигналы абонента, согласно варианту осуществления изобретения.
Перечисленные выше и другие проблемы решаются с помощью предложенных способа и устройства. В настоящее время предпочтительным вариантом осуществления изобретения является система для определения местонахождения абонента в сотовой системе связи с многопозиционным доступом с кодовым разделением каналов (МДКР). С помощью данных МДКР-модуляции оценивается время распространения или прохождения луча, первым пришедшего на абонентское устройство. Первый принятый луч в типовом случае представляет кратчайший путь между базовой станцией и абонентом, и оценка времени распространения позволяет вычислить расстояние между абонентом и базовой станцией. Вычислив расстояние до нескольких, например трех, станций, можно вычислить местонахождение конкретного абонента, причем это вычисление ограничено точностью отсчета времени при измерениях и другими задержками при обработке. В предпочтительном варианте время распространения сигнала между каждой базовой станцией и абонентом вычисляется автоматически в корреляционном приемнике. Этапы обработки включают передачу сигнала, кодированного псевдошумовой (ПШ) последовательностью, подстроенного по времени с точностью до некоторой доли элемента ПШ-сигнала (например, 1/16 элемента), и корреляционную обработку этого сигнала в приемнике. Поскольку модуляционная последовательность (например, ПШ-последовательность) известна и используется при синхронизации/свертке, можно определить точное время приема данного сигнального элемента. Определив время приема множества связанных сигналов, можно вычислить задержку и использовать ее для определения оценки местонахождения.
В одном из вариантов осуществления изобретения абонент использует известную ПШ-последовательность и информацию о сдвиге для определения того, какие связанные элементы ПШ-последовательности от разных базовых станций (стандартных и/или вспомогательных) были переданы в одно и то же время, а также определяет время приема этих связанных сигнальных элементов. Из разности времен приема определяется временная разность и, следовательно, разность расстояний. С помощью разности расстояний и известных местонахождений базовых станций определяется оценка местонахождения. Если абонент осуществляет связь только с одной или двумя базовыми станциям, то можно привести в действие дополнительные базовые станции (включая, в случае необходимости, вспомогательные станции), чтобы абонент смог произвести измерение времени.
Согласно другому варианту осуществления изобретения базовые станции, осуществляющие прием, управляются для выполнения измерений времени приема выделенных сигнальных элементов, и разность времени приема используется аналогичным образом для вычисления местонахождения абонента. Если требуются дополнительные станции приема ввиду наличия помех или т.п., то вспомогательные станции управляются так, чтобы принимать сигналы, передаваемые от данного абонентского устройства. При необходимости, в экстренных случаях абонентское устройство запитывается до максимального уровня мощности, чтобы по меньшей мере три базовые станции могли принимать сигнал и производить его временную оценку. Кроме того, если необходимы более точные измерения, можно передать абоненту специальное сообщение, касающееся местонахождения. После приема абонент определяет сдвиг сигнального элемента/времени для ответного сигнала, кодирует этот сдвиг и передает ответный сигнал. После декодирования сдвига и сравнения времен приема одного и того же сигнального элемента (например, первого сигнального элемента цикла), используемого для определения сдвига, определяются значения времени с компенсированной задержкой для разных траекторий распространения и из них определяется местонахождение. И наконец, поскольку принять сигнал в более удаленных базовых станциях может быть затруднительно, можно произвести экстренный сброс нагрузки на ближайших базовых станциях для обеспечения дополнительной дальности действия, поскольку в системе связи с МДКР возможен компромисс между пропускной способностью и длительностью действия. Это позволяет улучшить перекрытие зоны действия и обеспечить более надежное определение местонахождения.
На фиг. 1 изображена сотовая система связи 100, имеющая шестигранную форму ячеек, с базовыми станциями 110, 120, 130 и абонентом 140. Между базовыми станциями 110, 120 и 130 также расположены вспомогательные базовые станции 121. Расстояние между базовыми станциями 110, 121 и 130 и абонентским устройством 140 оценивается посредством определения времени распространения первого пришедшего луча, которое измеряется от заранее определенного опорного времени до момента времени, когда приемник определяет корреляцию переданного сигнала. Сложность заключается в том, что расстояние может быть переоценено или недооценено, поскольку измерение делается относительно произвольного опорного момента времени в приемнике (точное измерение возможно только в том случае, если в абонентском устройстве 140 используется более точная (и дорогая) система отсчета времени, например, на основании сигнала системы GPS или атомного стандарта частоты). Следовательно, расстояния 150, 160 и 170 соответственно могут быть длиннее или короче фактического расстояния между каждой базой 110, 121, 130 и абонентом 140, на основании определения корреляции, на величину, определяемую скоростью передачи сигнального элемента (при скорости передачи сигнального элемента приблизительно 814 нс, т.е. скорости сигнала с расширенным спектром, которая определяется в соответствии со стандартом IS - 95A TIA скоростью ПШ-последовательности) или приблизительно на 250 м на сигнальный элемент; поэтому желательно производить измерения времени со скоростью, превышающей скорость передачи сигнального элемента. На фиг. 1 расстояние 150 показано переоцененным, так как оно указывает точку 125, находящуюся за пределами фактического местонахождения абонента. Также переоценены точки 115 и 135. Эти точки будут скорректированы с помощью обработки расстояния, описанной ниже, которая даст более точную оценку действительного местонахождения абонента.
На фиг. 2 представлена структурная схема абонентского устройства МДКР 200, содержащего МДКР-приемник 201, блок определения местонахождения 202 и передатчик 203. Приемник 201 имеет общие высококачественные входные каскады 205, питающие три независимых гребенчатых входа 210, 220 и 230. Гребенчатые входы 210, 220 и 230 могут синхронизироваться с тремя разными принимаемыми лучами, разнесенными приблизительно на время одного ПШ-элемента или больше, что является типичным для приемника с расширенным спектром при непосредственной модуляции ПШ-последовательностью. Блок поиска 240 осуществляет поиск новых пиков корреляции со скоростью, превышающей скорость передачи сигнального элемента (в предпочтительном варианте обеспечивающей разрешение как для частоты синхронизации 50 нс), и может перераспределять гребенчатые входы на основании своей наилучшей оценки текущих состояний каналов. В обычных условиях корреляторы гребенчатых входов 210, 220 и 230 синхронизируются с тремя самыми сильными лучами и, если вторая и третья базовые станции могут давать достаточно сильный сигнал, они резервируются для синхронизации с сигналами тех других базовых станций, которые также задерживаются на время, соответственно превышающее время одного ПШ-элемента, как описано в стандарте IS - 95A. Если недостаточно сильный сигнал дают только две базовые станции, тогда назначаются два луча, по одному от каждой базовой станции, а третий луч - самый сильный из оставшихся лучей любой из этих базовых станций.
Если от абонентского устройства 200 требуется осуществить функцию определения местонахождения, предпочтительно попытаться найти три разные базовые станции, по одной для каждого луча, чтобы было достаточно информации для точной оценки местонахождения. Поэтому для связи с тремя базовыми станциями гребенчатые входы 210, 220 и 230 настраиваются таким образом, что декодируются сигналы по меньшей мере трех базовых станций. При наличии запасных генераторов пилот-сигнала (таких, как вспомогательное базовое устройство 121 на фиг. 1), физически размешенных между базовыми станциями, они могут быть активизированы в ответ на запросный сигнал маяка, чтобы перекрыть зону дополнительными опорными сигналами, обеспечить возможность абоненту получать оценки местонахождения с использованием упомянутых генераторов пилот-сигнала, так же как и стандартных базовых станций. Эти вспомогательные устройства имеют сдвиг ПШ-сигнала, отличающийся от окружающих базовых станций, и в типовом случае оснащены GPS-приемником для обеспечения соответствующей синхронизации. Их соединяют с базовыми станциями или другим контроллером инфраструктуры с помощью любых традиционных средств, например через эфир или посредством витой пары проводов. Их активизация предпочтительно осуществляется по запросу, поступившему на контроллер, или команде, переданной от обслуживающей базовой станции на управляемый ею локальный вспомогательный блок, после указания абонентом, что доступно меньше трех станций. Альтернативно, вспомогательные узлы могут быть оснащены сканирующими приемниками, которые в ответ на сигнал запроса от абонента начинают вести передачу в течение ограниченного периода (например, 5 с, чтобы минимизировать помехи в системе). При соответствующем размещении такие вспомогательные узлы можно использовать для уменьшения степени неопределенности для некоторых местоположений или для общего повышения точности определения местонахождения в стратегических зонах, например на главных автомагистралях, в торговых центрах или центральных деловых районах. С учетом ограничений для МДКР-системы, связанных с временными помехами, в некоторых случаях только одна базовая станция будет способна принимать сигнал данного абонента и наоборот, так что вспомогательные узлы необходимы для получения требуемого множества отсчетов.
Относительное время приема каждого сигнала определяется за счет использования информации о переднем фронте (или альтернативно о пиках) соответствующих пиков корреляции в блоке поиска и подстройки их на величину сдвига, определенную в схеме точной временной подстройки (например, в системах автоматической подстройки по задержке 215, 225 и 235 для каждой ветви, связанных с фильтрами 250 - 270). Предпочтительно соответствующими пиками корреляции являются те, которые принимают на разных ветвях, но в одном сигнальном элементе. При таком решении определяется точное время фронта вместе с номером ПШ-последовательности (т.е. положением сигнального элемента (например, номер 245) повторяющейся ПШ-последовательности (длиной, например, приблизительно 16000 сигнальных элементов). При использовании уже определенного сдвига ПШ-последовательности и конструкции системы, в которой базовые ПШ-последовательности каждой базовой станции равны и передаются в одно и то же время системы плюс-минус индивидуальный сдвиг ПШ-последовательности, разность относительных времен даст разность задержки на траектории распространения. Это проиллюстрировано на фиг. 3. В момент времени T0 две базы B1 и B2 ведут передачу, но база B1 передает ПШ-элемент 0, а база B2 предает ПШ-элемент 256, поскольку сдвиг ПШ-последовательности составляет 256 сигнальных элементов. В некоторое время T1 после активизации определения местонахождения абонент определяет, что фронт ПШ-элемента 4 принят от базы B1. Следующий фронт ПШ-элемента от базы B2 принимается в момент времени T2 на 1/8 элемента позже, и этот сигнальный элемент определяется как 280-й в данной ПШ-последовательности. На основании этих времен приема и номеров ПШ-последовательносги вычисляется разность задержки распространения, как (ПШ-последовательность - сдвиг) + (разность приема, T2-T1) - (ПШ-последовательность - сдвиг) = ((261 - 256) + (1/8)) -(4-0) = 11/8 элемента • 814 нс/элемент = 916 нс. При скорости распространения радиосигнала приблизительно 1/3 м/нс это дает разность расстояний траекторий распространения приблизительно около 300 м. Точность определения местонахождения ограничена только частотой синхронизации системы и степенью синхронизации. Если все базовые станции используют данные отсчета времени GPS, то в настоящее время возможны синхронизированные передачи (т.е. фронтов сигнальных элементов) в пределах 50 нс (или приблизительно 1/16 скорости передачи сигнального элемента). Если местный тактовый генератор дает по меньшей мере ту же частоту синхронизации 20 МГц, то возможно определение местонахождения с точностью в пределах 100 нс или 30 м.
Как показано на фиг. 2, сигналы схем подстройки по задержке 215, 225 и 235 подаются соответственно на каждый гребенчатый элемент 210, 220 и 230 для подстройки сигналов и выдачи на выходе точно подстроенных по времени сигналов. Как отмечалось выше, выходные сигналы схем подстройки по задержке могут также обеспечивать точную информацию о фазовом сдвиге для подстройки времен приема ПШ-элементов предпочтительно после фильтрации их в фильтрах нижних частот (ФНЧ) 250, 260 и 270 соответственно для каждого канала, которые эффективно усредняют выходные сигналы каждой схемы подстройки по задержке 215, 225 и 235. Эта усредненная информация о точном фазовом сдвиге вместе с идентификацией номера сигнального элемента/времен/базы или сдвига (т.е. информация B1 - B3) от блока поиска 240 (который также адаптирован для определения ПШ-элемента/времени) подается на блок поиска местонахождения 280. Блок поиска местонахождения 280 принимает информацию точного фазового сдвига от каждой ветви и корректирует время приема от блока поиска 240 для каждого сигнального элемента, давая скорректированное относительное время приема для каждой ветви. По самому раннему времени (например, времени приема сигнала от базовой станции 1) определяется разность времени приема tB21 и tB31 для других сигналов B2 и B3 и определяются соответствующие расстояния dB21 и dB31. Таким образом, теперь известно, что расстояние от базовых станций 1 (110), 2 (120) и 3 (130) составляют соответственно dB1, (dB1+dB21) и (dB1+dB31). Кроме того, из сдвигов ПШ-последовательностей известна идентификация базовых станций, а их территориальное положение можно получить из памяти 281. После этого легко выполнить программу поиска (например, как на фиг. 4) для определения географических координат данного средства мобильной связи. В примере на фиг. 4 используются известные местонахождения базовых станций дли определения трех отрезков L12 (151), L23 (152) и L13 (153). Расстояния dB21 и dB31 вычитаются соответственно из отрезков L12 (151), L23 (152) и L23 (152), L13 (153), а оставшиеся сегменты делятся пополам перпендикулярными линиями N12 (154), N23 (156) и N13 (155). Точка пересечения линий N12 (154), N23 (156) и N13 (155) является местонахождением абонента 140. Эту информацию можно затем передать на обслуживающую базовую станцию для передачи ее передавшему запрос элементу обслуживающего регистра местонахождения или передать для использования абонентом (например, на сетку карты или другое устройство определения местонахождения, не показанное на чертеже).
Альтернативно, если информация о местонахождении базовой станции недоступна для абонента, можно передать с сигналом запроса местонахождения на обслуживающую базовую станцию информацию о фазовом сдвиге, сигнальном элементе, отсчете времени и базовом сдвиге. При этом блок поиска местонахождения может обратиться к собственной базе данных и определить местонахождение абонента. Затем эти данные о местонахождении передаются назад с ответным сообщением о местонахождении абоненту или другой запрашивающей стороне.
Однако предпочтительный вариант определения местонахождения с использованием оборудования инфраструктуры показан на фиг. 5, на котором представлена в общем виде структурная схема МДКР-системы 300 с инфраструктурой, имеющей первую базовую станцию МДКР 301. База 301 имеет общий входной высокочастотный каскад 305, который питает независимые гребенчатые входы приемных каналов 310, 320, ... 330. Эти гребенчатые входы могут синхронизироваться на четырех разных принимаемых лучах, разнесенных по меньшей мере на время одного ПШ-элемента, что типично для DSSS-приемника. Два блока поиска 340 сканируют новые пики корреляции и могут перераспределять гребенчатые входы на основании своей оценки текущего состояния канала. Нормально, четыре коррелятора гребенчатых элементов 310, 320 и 330 синхронизируются с четырьмя самыми сильными лучами.
В случае необходимости осуществления функции определения местонахождения возможны два общих подхода - пассивный (т.е. без ответа от абонентского устройства) или активный. В любом случае предпочтительно найти по меньшей мере три разные базовые станции, способные принимать сигнал абонента, чтобы иметь достаточно информации для оценки местонахождения. В первом варианте в пассивном режиме четыре гребенчатых отвода 310, 320, ... 330 базы 301 используются для обнаружения сигнала связи. В каждом гребенчатом элементе используется система автоподстройки по задержке для выработки оценки отсчета времени (т.е. подстройки) или корреляционной обработке сигнала луча. Это обеспечивает более точную оценку времени корреляции, аналогично описанному выше процессу, используемому абонентским блоком. Блок поиска и детектор сигнального элемента/времени 340 коррелирует сигнал каждого отвода (канала) и также определяет наилучший текущий канал для использования (предпочтительно по наиболее раннему принятому пику для одного и того же сигнального элемента), но могут использоваться и другие методы выбора для определения наилучшего текущего канала; сигнал наилучшего канала используется для определения ПШ-элемента и информации о времени приема аналогично блоку поиска 240 абонентского устройства.
Для инициализации процесса определения местонахождения в предпочтительном варианте в системе 300 вырабатывается команда, вероятнее всего, на региональной станции, такой как узел коммутации мобильной связи 365, операционный узел или, возможно, в подсоединенной, например, телефонной сети общего пользования 375. Затем запрос местонахождения обрабатывается регистром исходного местонахождения 366 для определения текущей обслуживающей базовой станции (станций). После приема команды определения местонахождения процессор 350 базовой станции 301 (и аналогичные процессоры других обслуживающих базовых станций) с помощью детектора 340 определяет время приема сигнального элемента. Предпочтительно это делается всеми базовыми станциями, определяющими время нарастания переднего фронта определенной группы ПШ-элементов, например, определяющими время нарастания фронта для каждого 64-го сигнального элемента (т. е. номеров 0, 64, 128 и т.д. в ПШ-последовательности) для определенного количества сигнальных элементов, например 10. Затем эта информация передается приемником каждой базовой станции, вместе с ее идентификацией, указанному блоку, например, блоку поиска 361 контроллера базовой станции 360 или блоку поиска местонахождения 367 регистра исходного местонахождения 366 и т.п. Поэтому разность времени приема для одних и тех же сигнальных элементов, если каждый сигнальный элемент получен из одной и той же одной передачи элементов, может быть использована для определения разностей задержки распространения. Иными словами, для каждого номера сигнального элемента разность между временами приема в разных базовых станциях дает разность распространения, и местонахождение может быть определено по этой информации в совокупности с известным местонахождением ведущих прием баз аналогично процедуре, описанной со ссылкой на фиг. 4. Если взять несколько наборов информации для относительно краткосрочного цикла (например, 10 моментов времени, каждые 64 сигнальных элемента, за приблизительно 500 мкс) и усреднить или иным образом оптимизировать вычисление, используя определенные местонахождения, то можно свести к минимуму ошибки определения местонахождения. Опытному специалисту будет понятно, что на практике для этих вычислений можно использовать и другое решения. Например, обнаружение в одно и то же системное время (времена) передних фронтов в одном сигнальном элементе с указанным временем (временами) вместе с временными разностями относительно указанного системного времени и номера сигнального элемента можно использовать для определения разностей задержки распространения (хотя при этом может возникнуть дополнительная ошибка, так как время передачи для разных сигнальных элементов ограничено точностью частоты синхронизации абонентского устройства; даже в случае синхронизации с частотой 50 нс ошибка все равно будет больше, чем при передаче одного и того же сигнального элемента (при которой нет ошибки в отсчете времени). Важно то, что при определении местонахождения абонента будет использоваться идентификация данного сигнального элемента (например, номер/положение в ПШ-последовательности), точное время приема (например, переднего фронта или пика при избыточной частоте синхронизации) в разных базовых станциях.
В предпочтительном варианте осуществления режима активного определения местонахождения применяется система измерения дальности с прямым и обратным прохождением сигнала с использованием как информации о времени приема сигнального элемента, так и определенной ответной информации от абонента. В этом варианте процесс также инициируется запросом местонахождения в системной инфраструктуре, переданным базовой станции 301, которая находится на связи с данным абонентом. Процессор 350 передает сигнал запроса местонахождения (LOC_S 351) для соответствующего кодирования с помощью кодера 352 и расширения по спектру с помощью модулятора 355. Используя системные часы 353 (предпочтительно на основании GPS, но можно использовать и другие точные средства, например атомный стандарт частоты), регулятор точного времени 354 (например, генератор селекторных импульсов) управляет модулятором так, чтобы он обеспечивал точное временное положение переднего фронта выходных сигнальных элементов предпочтительно с точностью в пределах 50 нс. Процессор 350 также определяет посредством модулятора 355 и часов 353 точное системное время для некоторого опорного сигнального элемента (например, сигнального элемента 1024 в последовательности, состоящей из 16384 элементов) в момент системного времени TS(0), по которому в дальнейшем будут определяться времена передачи других сигнальных элементов. Затем последовательность выходных сигнальных элементов передается абоненту.
В соответствии с фиг. 2 после модуляции и приема сигнала запроса местонахождения 351 процессор 280 дает команду средству поиска 240 определить идентификацию и информацию об отсчете времени для следующего ПШ-элемента аналогично тому, как было описано выше. Для целей иллюстрации допустим, что определенным сигнальным элементом является 1088-й элемент (базовой ПШ-последовательности) в относительное абонентское время TR(0). Чтобы обеспечить точную информацию о времени прямого и обратного прохождения сигнала в абонентском устройстве процессор 280 затем определяет локальное время, в которое будет затем передаваться заранее определенный сигнальный элемент абонентской ПШ-последовательности. Для удобства этот заранее определенный сигнальный элемент предпочтительно выбирается как один из повторяющейся серии (например, каждый 50-й элемент абонентской ПШ-последовательности), который предстоит передать (например, сигнальный элемент 100); может быть выбран практически любой другой сигнальный элемент, например первый элемент следующего цикла продолжительностью 20 мс, но при этом следует предпочтительно стремиться к минимизации требований к точности временной подстройки абонентского выходного сигнала и обработке местонахождения системой. В любом случае локальное время выбранного сигнального элемента для выходного сигнала модулятора 291 передающей схемы 203 определяется, например, посредством определения времени выхода текущего сигнального элемента (например, с помощью детектора ПШ-элементов времени 292) и предварительного вычисления для определения времени выдачи заранее определенного сигнального элемента (например, элемента 100 в TR (24 1/16), причем относительное время измеряется в интервалах скорости передачи сигнального элемента). Конечно, если в текущий момент передача не ведется, базовым станциям будет предоставлена достаточная задержка (например, приблизительно 2 с), чтобы они могли произвести тренировку с абонентской ПШ-последовательностью перед передачей заданного сигнального элемента. Затем процессор передает ответный сигнал местонахождения RESP 282 для кодирования кодером 290 и дает команду модулятору 291 точно выдать заданный сигнальный элемент в данное время (например, TR(24 1/16)) и, если необходимо контролировать периодическую группу элементов, точно выдать любые предыдущие сигнальные элементы этой периодической группы (например, сигнальные элементы 150, 200 и т.д.) в течение некоторого установленного периода. Сигнал RESP 282 включает базовую информацию о сигнальном элементе (1088, TR(0)), информацию о заданном сигнальном элементе (100, TR (24 1/16)) и заранее установленный (например, калиброванный/вычисленный) коэффициент абонентской задержки, соответствующий задержкам приема выдачи на выходе (т. е. время, требуемое для прохождения сигнала от антенны в блок поиска 240 и для изучения выходного сигнала антенной, спустя точное время выхода из модулятора 291, если это еще не известно в инфраструктуре системы в качестве характеристик данного абонентского устройства).
Как показано на фиг. 5, в то же время, когда система дает команду базовой станции 301 послать сигнал запроса местонахождения 351, она также извещает базовые станции, осуществляющие обмен данными, о начале накопления информации о местонахождении. Если меньше трех базовых станций осуществляют связь (т. е. при "мягкой" (программируемой) передаче связи) или способны принимать абонентский сигнал, задающее устройство (например, блоки поиска местонахождения/процессоры 361 или 367) даст команду одной или нескольким вспомогательным базовым станциям, таким как базовая станция 356, расположенным вблизи обслуживающих базовых станций, начать прием на частоте, выделенной данному абоненту. Следовательно, при простейшей реализации изобретения вспомогательными базовыми станциями могут служить настраиваемые приемники с точными системными часами (например, коррелированными с GPS); если вспомогательная базовая станция не подсоединена через проводную связь к контроллеру базовой станции, то она может быть реализована как стационарное абонентское устройство (например, стационарный блок с радиодоступом), при этом единственным отличием от абонентского устройства будет то, что стационарный блок с радиодоступом работает в системном времени (например, за счет использования часов GPS). В этом последнем варианте стационарный блок с радиодоступом будет передавать ответную информацию о своем местонахождении через свою обслуживающую базовую станцию, например базовую станцию 301.
Все базовые станции, ведущие прием, например базовая станция 301 и вспомогательная базовая станция 356, начинают накапливать абонентскую информацию о сигнальном элементе/времени после инициализации запроса местонахождения. Накапливаемая информация может включать время (например, время приема переднего фронта сигнала) и номер каждого сигнального элемента, принятого в установленный период. Вместо сохранения каждого сигнального элемента, что в одном цикле продолжительности 20 мс будет составлять почти 25000 элементов данных, предпочтительно использовать на всех принимающих базовых станциях периодическое количество сигнальных элементов (например, каждый 50-ый элемент последовательности); в этом последнем случае абонентское устройство имеет описанную выше конфигурацию, чтобы выбирать заданный элемент, являющийся одним из этих периодических сигнальных элементов (например, элемент 100). Опытному специалисту будет понятно, что можно использовать любое количество периодов или конкретных сигнальных элементов (например, первый сигнальный элемент цикла), поскольку информация собирается на одном и том же сигнальном элементе (элементах) на всех базовых станциях с целью минимизации ошибки. Для удобства предпочтительно, чтобы абонентское устройство соответствующей конфигурации выбирало заданный сигнальный элемент, совпадающий с сигнальным элементом (элементами), контролируемым базовыми станциями, для упрощения дальнейших вычислений; этот выбор может быть основан на предварительном программировании или на данных в сигнале запроса местонахождения 351, указывающих сигнальный элемент (элементы)/контролируемый период (при этом точно выдаваться должен только заданный сигнальный элемент (элементы)).
После приема сигнала с расширенным спектром RESP от абонента (предпочтительно переданного посредством внутриполосной сигнализации с другими текущими передачами речевых сигналов/данных) процессоры 350 и 358 базовых станций 301 и 356 обнаруживают сигнал и предварительно определенную информацию о заданном сигнальном элементе и передают некоторое заранее установленное число пар данных элемент/время на блок поиска местонахождения 361 или 367. Например, для обеспечения усреднения для повышения точности каждая базовая станция 301, 356 может передавать 8 пар данных элемент/время, начиная с заранее определенного сигнального элемента и его времени приема (например, пары {100, TS (28 7/16)}, {150, TS (78 7/16)}, ... {450, TS (378 8/16)}, вместе с информацией сигнала RESP (например, базовая пара данных элемент/время { (база) 1088, TR(0)} , заданная пара данных элемент/время { (абонент) 100, TR(24 1/16)} и известный коэффициент задержки {4/32}). На фиг. 6 показана временная диаграмма, иллюстрирующая эту последовательность. TS(0) представляет стартовое время системы, показанное для удобства как 0-ой разряд тактового сигнала системы, а TR(0) - относительное время абонентских часов. PNBI (1088) представляет 1088-й сигнальный элемент в ПШ-последовательности первой базовой станции (301), а PNS(100) - 100-й сигнальный элемент в абонентской ПШ-последовательности. Таким образом, базовый сигнальный элемент 1088 выдается на выходе в системное время 0 и излучается с базовой антенны после времени задержки передачи ΔtB1. После задержки распространения Δp1 и затем времени задержки приема абонентом ΔrS (т.е. от абонентской антенны до детектора 240) детектор 240 определяет сигнальный элемент 1088 как принятый в момент времени TR(0). Затем процессор 280 определяет следующий 50-й сигнальный элемент абонентской последовательности как элемент 100 и вычисляет из текущего абонентского элемента/времени, что время выхода для элемента 100 будет TR (24 1/16). Зная калиброванные задержки ΔrS и ΔtS (задержка от выхода до излучения антенной), например, по 2/32 элемента каждая, абонент посылает сигнал RESP 282, включающий информацию, например, [{ 1088, TR (0)}, {100, TR (24 1/16)}, {4/32}].
Детектор 240 базовой станции 301 принимает абонентский сигнальный элемент 100 в системное время TS (28 7/16), и базовая станция 357 принимает его во время TS (29 7/16) с задержками распространения и приема (т.е. от антенны к детектору) Δp2, ΔrB1 и Δp3, ΔrB2 соответственно. Аналогичные повторные измерения также производятся, например, базой 301, принимающей сигнальный элемент 150 во время TS (78 7/16), при этом абонент контролирует время выхода сигнального элемента 150 как TR (74 1/16), т.е. точно через 50 элементов (40, 700 нс).
После определения установленного количества пар данных информация, содержащаяся в парах данных элемент/время, и информация ответного сигнала передаются на блок поиска местонахождения 361 или 367. Затем блок поиска 361 или 367 вычисляет задержки распространения, например Δp1 - Δp3, используя другую известную информацию. В этом случае допустим, что калиброванные базовые задержки ΔtB1, ΔrB1 и ΔrB2 составляют 5/32, 3/32 и 3/32 элемента. Так как Δp1 по существу равно Δp2, 2Δp1 = (TS(28 7/16) - TS(0) - Δ tB1+ ΔtB1)-(TR(24 1/16) TR(0))-( ΔrS+ ΔtS) =(28 7/16) - (8/32) -(24 1/16) - (4/32) = 4 сигнальных элемента (1).
Следовательно, Δp1 равно двум сигнальным элементам или 1628 нс, а длина пути распространения составляет около 488 м (+/- 30 м при общей неопределенности 100 нс). Поскольку Δ p1 известно, можно аналогичным способом вычислить Δp3, которое в проиллюстрированном случае дает время, равное трем сигнальным элементам, и расстояние 733 м. Посредством вычисления длины траектории для по меньшей мере трех приемников и поиска информации о местонахождении на ведущих прием базах (например, в базах данных 362 или 368) местонахождение абонента можно определить, вычислив единственную точку (или небольшую область наибольшей вероятности), в которой могут пересечься все соответствующие пути распространения. Затем этот процесс повторяется для каждого набора данных время/сигнальный элемент. Каждая вычисленная точка (или центроид вероятной области) затем используется при определении местонахождения абонента, например, проще всего, путем усреднения, хотя может быть использован любой подходящий метод для приближенного определения наиболее вероятной точки/области из множества точек/областей. Местонахождение наиболее вероятной точки/области предпочтительно запоминается в базе данных 369 характеристик абонента регистра исходного местонахождения 366. Кроме того, весь процесс может быть повторен после одного или нескольких следующих периодов времени, порядка секунд или минут, с использованием множества наиболее вероятных областей для определения скорости и направления движения данного абонента; если используются достаточно точные абонентские часы с дрейфом величиной менее 50 нс за период продолжительностью в несколько минут (т.е. сдвиг абонентских часов относительно системного времени известен для данного периода), повторные обнаружения в базовых станциях могут выполняться без необходимости повторения сигнала запроса. И наконец, определенное местонахождение и скорость/направление движения передаются тому, кто первым выдал запрос, например, оператору 370 или через телефонную коммутирующую сеть общего назначения 375.
Существенное преимущество использования активного способа определения местонахождения по сравнению с пассивным состоит в том, что при желании можно получить более точную трехмерную информацию. Это особенно полезно в городских районах или гористых местностях, где угол наклона траекторий распространения относительно горизонта может значительно превышать 0o. Несмотря на то, что для повышения точности пассивного процесса можно использовать трехмерные координаты базовых станций и известную топографию местонахождения абонента в первом приближении, опытному специалисту будет понятно, что лучшая аппроксимация достигается по измеренному времени распространения в отличие от использования только разностей времени распространения. Поскольку определенные траектории распространения одинаково точны по трем измерениям, то нужно только дополнительно обработать координаты местонахождении базовой станции по оси Z (т.е. третьему измерению) вместе с координатами по осям X и Y, чтобы определить трехмерную область вероятного местонахождения. Если сравнить это с известными данными застройки и топографии, то можно определить местонахождение в пределах +/- 8 этажей (с неопределенностью 100 нс) или лучше в пределах одного здания. Дополнительную информацию, такую как относительный уровень принимаемых сигналов и характеристики вероятных потерь в тракте распространения сигналов в здании, можно использовать для дальнейшего сужения области вероятного местонахождения.
На фиг. 7 представлена блок-схема последовательности операций способа 400, иллюстрирующая процесс измерения абонентом сигналов базовой станции для получения оценки местонахождения. Процесс начинается с блока 405, представляющего поступление команды определить местонахождение абонентским устройством (например, по инициативе самого абонента или автоматически на основании другого индикатора, такого как датчик движения, регистрирующий аварию транспортного средства). В блоке 410 проверяется состояние абонента и в блоке 415 выносится решение действительно ли абонент находится в состоянии трехканальной "мягкой" передачи связи. Если нет, осуществляется переход к блоку 420, в котором проверяется, имеется ли три базовых станции в группе кандидатов. Eсли нет, в блоке решения 425 осуществляется проверка порога добавления базовых станций к группе кандидатов. Если этот порог не находится на минимуме, блок 430 снижает порог и возвращается к этапу 420. Если блок 425 уже находится на минимальном уровне, осуществляется переход к блоку 450. Этот блок различает функцию определения местонахождения как экстренную и неэкстренную. При этом, если обрабатывается неэкстренная функция, изменения уровня системы разрешаются только при невысоком уровне использования, так как может произойти потеря обслуживания абонентов за счет повышения уровня помех. В неэкстренной ситуации при высокой загрузке системы выполняется обработка согласно блоку 460. Если указана экстренность, то перед блоком 460 осуществляется обработка в блоке 455. Это происходит предпочтительно в ответ на экстренный сигнал маяка, на который настроены вспомогательные генераторы пилот-сигнала, и автоматически отвечают на него; альтернативно экстренный сигнал может быть передан на обслуживающую базу и обработан для активизации вспомогательных базовых станций. В последнем случае может быть аналогично использован второй неэкстренный запросный сигнал с генерацией команды активизации, если управляющий процессор (например, процессор/блок поиска 361 контроллера базовой станции 360 на фиг. 5) показывает, что загрузка системы находится ниже порогового уровня. В этом случае блок 455 активизирует ближайшие генераторы пилот-сигнала, которые обеспечивают более полное перекрытие зоны обслуживания множеством станций, позволяя абоненту принимать сигнал от нескольких станций. Блок 460 проверяет, находится ли абонент в состоянии трехсторонней "мягкой" передачи связи. Если нет, ему дается команда 465 перейти в режим трехканальной "мягкой" передачи связи, используя лучи с самым сильным сигналом по меньшей мере от трек базовых станций. Если результат обработки в блоке 460 положительный или завершено выполнение обработки в блоке 465, осуществляется переход к блоку 440 и накапливаются данные, как было описано выше со ссылкой на фиг. 2. Эти данные используются для обработки оценки местонахождения (например, в блоке поиска 280 с использованием дополнительных данных из памяти 281 на фиг. 2) и система возвращается в номинальный режим 445.
Если в блоке 415 обнаружено, что абонент находится в состоянии трехканальной "мягкой" передачи связи, то осуществляется переход к блоку 440. Если в блоке 420 обнаружено, что в группе кандидатов есть три базовые станции, то выполняется обработка в блоке 435, который помещает три разные базовые станции в активную группу. Затем выполняется обработка в блоке 440, как было описано выше, и затем в блоке 445.
На фиг. 8 проиллюстрирована последовательность операций способа 500 измерения абонентского устройства базовыми станциями для получения оценки местонахождения. Процесс начинается в блоке 505, когда активизируется функция определения местонахождения. В блоке 510 проверяется состояние абонента и в блоке 515 выносится решение, находится ли абонент в состоянии трехканальной "мягкой" передачи связи. Если нет, факультативно выполняется блок 520, который проверяет, есть ли три базы в группе кандидатов. Если нет, в блоке вынесения решения 525 осуществляется проверка порога добавления баз к группе кандидатов. Если этот порог не находится на минимальном уровне, то в блоке 530 снижается порог и осуществляется возврат к этапу 520. Если блок 525 уже находится на минимальном уровне, выполняется блок 535, который будет продолжать обработку оценки местонахождения, но теперь только с двумя базовыми станциями, что дает менее точную оценку, чем в предпочтительном варианте с использованием трех базовых станций при измерениях. Если в блоке 515 обнаружено, что абонент находится в состоянии трехканальной "мягкой" передачи связи, или в блоке 520 обнаружено, что в группе кандидатов есть три базовые станции, то выполняется переход к блоку 540. В блоке 540 осуществляется проверка, находятся ли эти три базовые станции в активном состоянии для приема сигнала данного абонента. Затем факультативно выполняется обработка согласно блоку 545. Этот блок проверяет, может ли каждая базовая станция принимать сигнал данного абонента. Если это так, выполняется обработка согласно блоку 550, при этом направляется сигнал запроса местонахождения при работе в активном режиме, и в обоих режимах осуществляются сбор имеющихся данных и обработка для получения оценки местонахождения, как было описано выше. В блоке 555 осуществляется возврат всех параметров к нормальным, и на этом измерения заканчиваются. Если в блоке 545 обнаружено, что данного абонента могут принимать меньше трех базовых станций, то в блоке 546 осуществляется проверка, имеются ли вспомогательные базовые узлы. Если это так, в блоке 547 активизируются локальные вспомогательные станции, и в блоке 560 проверяется, указана ли экстренность. Если нет, в измерениях можно использовать только те базы, которые принимаются, что может ухудшить качество оценки. Если указана экстренность (например, сигналом абонента, таким как набор номера 911 или экстренный запрос от санкционированного пользователя, связанного с этой инфраструктурой), выполняется обработка согласно блоку 555, при которой проверяется, работает ли данное абонентское устройство на максимальной мощности. Если нег, в блоке 570 увеличивается мощность и процесс обработки возвращается к блоку 540. Если в блоке 565 обнаружено, что абонентское устройство работает на максимальной мощности, в блоке 575 осуществляется проверка, может ли каждая базовая станция принимать этого абонента. Если да, выполняется обработка согласно блоку 550; в противном случае загрузка ячейки снижается, как показало в блоке 580, для увеличения эффективного диапазона ячеек в активной группе, которые имеют трудности с приемом данного абонентского устройства. Затем в блоке 585 проверяется, достигнут ли предел сброса загрузки, и если да, то осуществляется переход к блоку 550; в противном случае - переход к блоку принятия решения 575 для проверки, может ли теперь каждая базовая станция принимать абонента.
Таким образом, специалистам будет понятно, что согласно изобретению предложены способ и устройство для оценки местонахождения абонентского устройства системы радиосвязи, которые полностью соответствуют задачам и преимуществам, описанным выше.
Хотя изобретение было описано на основании конкретных вариантов его осуществления, для специалистов будут очевидны многие изменения, модификации и варианты в свете данного описания. Например, хотя блоки поиска 240 и 280 абонентского устройства 200 и блок поиска 340 и процессор 350 и другие схемы базовой станции 301 описаны на уровне связей специфических логических и функциональных схем, специалисту будет понятно, что они могут быть реализованы многими способами, например в виде соответственно сконфигурированных и запрограммированных процессоров, заказных ИС и процессоров цифровых сигналов. Кроме того, изобретение не ограничено определением местонахождения на основании информации о сигнальном элементе в системе МДКР стандарта IS-95, а может найти применение в любой системе МДКР, использующей последовательности символов для расширения спектра. Таким образом, следует понимать, что в первом варианте осуществления активного поиска изобретение может включать способ и устройство для определения местонахождения абонентского устройства в системе радиосвязи с МДКР, имеющей множество базовых станций, в соответствии с которыми (a) передают первый сигнал с расширенным спектром, включающий запрос местонахождения, от первой базовой станции из множества базовых станций на данное абонентское устройство, причем сигнал с расширенным спектром формируют с использованием известной первой последовательности символов расширения спектра; (b) принимают в первой базовой станции второй сигнал с расширенным спектром, включающий ответное сообщение от абонентского устройства, причем второй сигнал с расширенным спектром формируют с использованием известной второй последовательности символов расширения спектра, а ответное сообщение содержит время приема первого символа первой последовательности и время передачи первого символа второй последовательности; (c) принимают заранее установленный символ второй последовательности в первой базовой станции и по меньшей мере во второй базовой станции и определяют первое и второе время приема заранее установленного символа соответственно в первой и второй базовых станциях; и (d) определяют местонахождение абонентского устройства на основании времени приема первого символа первой последовательности абонентским устройством, времени передачи первого символа второй последовательности абонентским устройством, первого и второго времени приема заранее установленного символа и известной информации о первой и по меньшей мере второй базовых станциях. Следующий вариант воплощения изобретения может включать способ и устройство для определения местонахождения абонента в системе связи с МДКР, имеющей множество базовых станций, в соответствии с которыми (a) принимают сигнал от абонентского устройства в каждой из указанных первой базовой станции, второй базовой станции и третьей базовой станции, причем данный сигнал формируют посредством модуляции известной последовательностью символов расширения спектра; (b) определяют первое время приема символа известной последовательности символов расширения спектра первой базовой станции, второе время приема данного символа во второй базовой станции и третье время приема данного символа в третьей базовой станции, и (c) определяют местонахождение абонентского устройства в процессоре местонахождения на основании первого, второго и третьего времени приема, а также известной информации о первой, второй и третьей базовых станциях. В еще одном варианте осуществления изобретения абонентское устройство, выполненное с возможностью определения своего собственного местонахождения во время сеанса связи в системе радиосвязи с МДКР, имеющей множество базовых станций, содержит (a) приемное средство для приема первого сигнала от первой базовой станции из множества базовых станций и второй сигнал от второй базовой станции из множества базовых станций, причем первый и второй сигналы формируют посредством модуляции известной первой последовательностью символов расширения спектра и известной второй последовательности символов расширения спектра соответственно; (b) детекторное средство для определения первого времени приема первого символа первой последовательности и второго времени приема другого символа второй последовательности и (c) процессор местонахождения для определения местонахождения абонентского устройства на основании первого и второго времени приема и дополнительной известной информации о первой и второй базовых станциях. Следующий вариант осуществления изобретения включает способ определения местонахождения абонента в системе радиосвязи с МДКР, имеющей множество базовых станций, включающих активные базовые станции и неактивные узлы, заключающийся в том, что (a) принимают сигнал с указанием экстренности; (b) определяют, могут ли по меньшей мере три активные базовые станции принимать сигнал от данного абонента, и если нет, активизируют по меньшей мере один из неактивных узлов как вспомогательную базовую станцию; (c) управляют группой, содержащей по меньшей мере три активные базовые станции, которые могут принимать сигнал от абонента, и любые вспомогательные базовые станции, активизированные на этапе (b), для передачи каждой из них сигнала с расширенным спектром, имеющего одну и ту же последовательность символов; (d) определяют каждое время приема в абонентском устройстве одного и того же символа указанной последовательности символов соответственно для каждого сигнала с расширенным спектром, переданного на этапе (c), и передают ответ от абонента, включающий каждое время приема; и (d) определяют местонахождение абонента на основании каждого времени приема и другой известной информации о данной группе.
Настоящее изобретение не ограничено описанными со ссылками на чертежи вариантами выполнения, но охватывает все изменения, модификации и варианты, соответствующие сущности и объему изобретения в соответствии с формулой изобретения.





Предложены способ и устройство для определения местонахождения средства связи в системе СDMA, в соответствии с которыми в первом варианте осуществления изобретения абоненту посылают запрос о местонахождении посредством сигнала с расширенным спектром и принимают от абонента сигнал с ответным сообщением, указывающим время приема конкретного символа базовой последовательности расширения спектра и время передачи конкретного символа абонентской последовательности расширения спектра. Одна база, наряду с другими ведущими прием базами, также принимает заранее определенный символ абонентской последовательности расширения спектра, и каждая из этих баз определяет соответствующее время приема данного заранее определенного символа. Затем принятая информация обрабатывается вместе с известным местонахождением базы и информацией о задержке, чтобы определить местонахождение абонента. Если количество баз, которые могут осуществлять связь с данным абонентом, недостаточно, например, из-за большой загрузки или помех, предусмотрены также вспомогательные базы для осуществления двусторонней связи с данным абонентом. Технический результат - создание усовершенствованного экономичного решения, позволяющего определять местонахождение абонентов в системе радиосвязи, 6 с. и 4 з.п.ф-лы, 8 ил.
| Автоматический огнетушитель | 0 |
|
SU92A1 |
| 0 |
|
SU369535A1 | |
| Автоматический огнетушитель | 0 |
|
SU92A1 |
| Машина для уборки соцветий лекарственных растений | 1972 |
|
SU470272A1 |
| Домовый номерной фонарь, служащий одновременно для указания названия улицы и номера дома и для освещения прилежащего участка улицы | 1917 |
|
SU93A1 |
| УСТРОЙСТВО для КОНТАКТНОЙ СВАРКИ ДЕТАЛЕЙ МАЛЫХ ТОЛЩИН | 0 |
|
SU241565A1 |
| Способ определения параметров движущегося объекта | 1973 |
|
SU479139A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА, ДВИЖУЩЕГОСЯ ПО ИЗВЕСТНОМУ ПУТИ | 0 |
|
SU260209A1 |
| DE 3605096 A1, 20.08.97. | |||
