Изобретение относится к области телевидения, в частности к способам определения пеленгов и/или координат наблюдаемых объектов.
Существует много способов определения пеленгов объектов, излучающих и/или отражающих электромагнитную энергию. Здесь следует упомянуть как известные относительно простые способы определения азимута (пеленга) как при помощи измерения углов теодолитом или другим угломерным инструментом, так и более сложные способы [1], [2] измерения пеленгов.
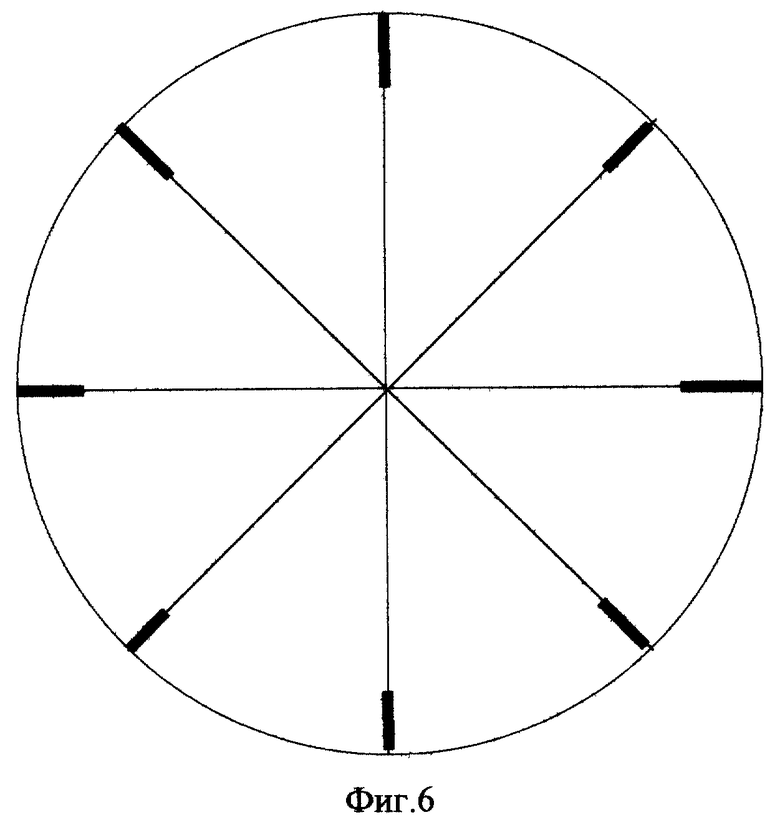
Сущность способа [1], принятого за прототип, поясняется изображением на фиг. 6. Она заключается в следующем: на концах, например, восьми диаметров окружности расположены приемники электромагнитного излучения. Из соотношения величин и/или фаз сигналов, наводимых в приемниках электромагнитным полем излучаемым или отражаемым объектом, определяют азимут (пеленг) объекта, а из фазовых характеристик сигналов каждого приемника - расстояние до источника. Указанный способ [1] предполагает использование приемной системы, состоящей из датчиков электрических сигналов. Способ [1] следует квалифицировать как способ пассивного несканирующего мульспектрального всеазимутального определения пеленгов и/или координат.
Известен также класс сканирующих всеазимультальных пеленгаторов, к которому относится, например, пеленгатор [2]. Однако заявляемый нами способ не относится к сканирующим, тем не менее упомянутый пеленгатор [2] представляет собой телевизионное устройство для пассивного мультиспектрального определения пеленгов и/или координат, использует в качестве пассивного измерительного устройства ПЗС-матрицу и в этом плане является ближайшим аналогом заявляемого нами телевизионного устройства для осуществления заявляемого способа.
К недостаткам способа [1], принятого за прототип, следует отнести следующее:
- в полном спектре электромагнитных излучений этот способ [1] эффективен только в радиодиапазоне, т.е. в диапазоне больших длин волн, поскольку способ [1] не предлагает конкретных технических решений для определения пеленга и координат источников электромагнитного излучения различного физического происхождения, и в частности в диапазоне электромагнитных волн светового спектра;
- точность определения пеленга, получаемого этим способом [1], невысока, поскольку измерения не защищены от атмосферных и прочих помех, а отношение сигнал/шум плохое при измерении пеленга на слабосигнальные объекты.
Появление в последние годы целей, невидимых в радиодиапазоне, например самолетов-стелс, резко ограничило возможность применения описанного способа [1].
Целью предлагаемого изобретения является устранение указанных недостатков при помощи использования собственного излучения объектов (целей) в диапазоне малых длин волн, например от 0,2 до 14 мкм.
Для пояснения предлагаемых способа и устройства, а также способа [1], принятого за прототип, даются перечисляемые ниже фигуры.
Как в способе, так и в устройстве может быть использовано более одной телевизионной камеры. Исходя из этого, элементы, относящиеся к той или иной телевизионной камере, обозначены двумя цифрами, где первая обозначает функциональный элемент, а вторая - принадлежность этого элемента к N-ой камере, а на фиг. 1 - к любой камере.
На фиг. 1 представлена упрощенная оптическая схема заявляемого устройства определения пеленгов. Оно состоит из ПЗС-матрицы 1N, объектива 2N и оптического конуса 3N. Поток энергии, излучаемый или отраженный объектом, отражается зеркальным покрытием поверхности оптического конуса 3N, проходит через объектив 2N и фокусируется на мишени ПЗС-матрицы 1N, создавая изображение точки, соответствующей удаленному наблюдаемому объекту.
На фиг. 2 представлен вид телевизионного изображения наблюдаемого пространства. Короткими утолщенными штрихами отображены наблюдаемые объекты. Длина вектора, соединяющего начало координат, соответствующее изображению вершины оптического конуса, с изображением объекта, несет информацию об угле места объекта.
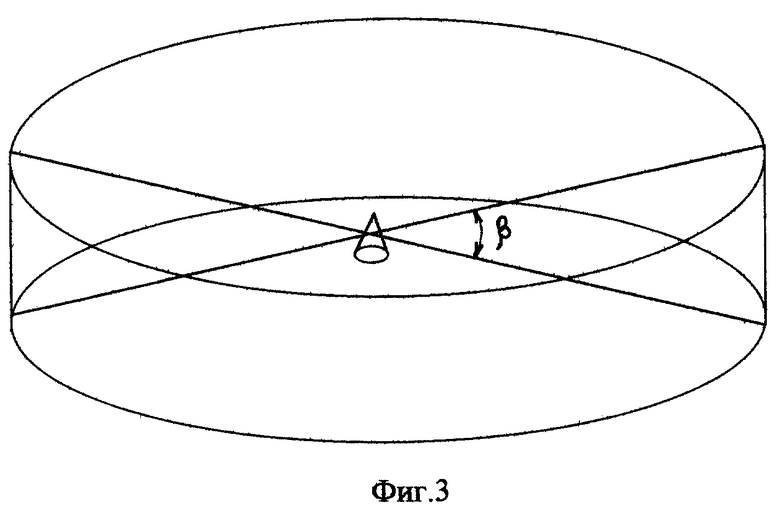
Ha фиг. 3 представлен вид наблюдаемого устройством пространства. Вертикальный угол поля зрения равен β, а горизонтальный - 360o.
На фиг. 4 представлен вариант определения пеленгов Пi при помощи определенных на телевизионном растре ортогональных координат изображений наблюдаемых объектов.
На фиг. 5 представлена блок-схема устройства. Все камеры работают синхронно и синфазно. На спецвычислитель видеосигналы с ТВ камер поступают последовательно, что достигается использованием блока буферной памяти. Блок синхронизации и управления управляет работой всех блоков устройства.
На фиг. 6 представлена логическая схема прототипа [1]: на концах восьми диаметров расположены приемники электромагнитной энергии. По соотношению величин наводимых в приемниках токов определяется линия пеленга на источник излучения.
Сущность предлагаемого способа представлена на фиг. 1. Она заключается в использовании телевизионного регистратора пеленгов и введенного в поле зрения объектива 2N телевизионной камеры с ПЗС-матрицей 1N оптического конуса 3N, который установлен таким образом, что его ось совпадает с оптической осью объектива 2N. При этом образующая конуса может иметь прямолинейную или криволинейную форму, выбираемую в соответствии с требуемой диаграммой направленности по углу места, а точкой начала координат на мишени ПЗС-матрицы является изображение вершины конуса на этой мишени.
Таким образом, поле зрения объектива телевизионной камеры разворачивается в сферический угол, горизонтальная составляющая которого равна 360o, а вертикальная составляющая равна половине (для случая, когда образующая конуса - прямая линия) угла поля зрения исходного объектива по вертикали. Рисунок, поясняющий эту операцию, приведен на фиг. 3, где β - половина угла поля зрения. Очевидно, что в этом случае способ позволяет одновременно проводить измерение пеленгов в любом направлении в горизонтальной плоскости.
Из фиг. 2 очевидна возможность измерения полярных координат при помощи измерения угла места по изображению объекта пеленга на изображении образующей конуса для использования этих данных при определении координат.
Расстояние от начала координат до изображения объекта на изображении образующей конуса несет информацию о вертикальном угле пеленга.
Способ определения пеленгов цели проиллюстрирован на фиг.2. На рисунке представлен растр телевизионной камеры, в которой вписано частично или полностью изображение оптического конуса. Возможен, например, вариант, когда растр вписан в изображение оптического конуса. Участки растра за пределами изображения оптического конуса кашируются или бланкируются для исключения влияния постороннего изображения на процесс измерения пеленгов. Так как в качестве измерительного инструмента используется ПЗС-матрица, обладающая высокой точностью регистрации элементов изображения, а также температурной и временной стабильностью, то измерения целесообразно перенести во временную область, используя в качестве мерительного инструмента тактовую частоту управления ПЗС-матрицей. Этот вариант позволяет измерять ортогональные координаты точек изображения на растре ПЗС-матрицы с высокой точностью. Так, например, для ПЗС-матрицы с рабочим числом пикселей 1000 x 1000 максимальная точность измерения пеленга составит 7,6 угловой минуты. Одновременность измерения любого количества пеленгов делает этот способ незаменимым для использования, например, на летательных аппаратах (ЛА). Переходя к спектральному диапазону излучения (отражения) объектов, следует отметить следующее: предлагаемый способ одинаково эффективен во всем рабочем диапазоне длин волн и точность измерения пеленгов практически не зависит от излучаемой (отражаемой) целью длины волны. Следует отметить принципиально важную характеристику предлагаемого способа: этот способ не требует специального облучения цели, как это делается при работе радара или ладара, т.е. устройства, выполненные по предлагаемому способу, являются полностью пассивными и не демаскируют носитель.
Ближайшим аналогом устройства, реализующего вышеописанный способ, является телевизионная камера [2], которая позволяет измерять углы (пеленги) между направлениями на объекты, но только в части пространства, ограниченного полем зрения телевизионной камеры.
Принятое за прототип телевизионное устройство [2] предназначено для пассивного сканирующего мультиспектрального определения пеленгов и/или координат и включает в себя телевизионную камеру с ПЗС-матрицей и спецвычислителем, причем в ПЗС-матрице пиксель или группа пикселей образуют пассивное измерительное устройство.
Устройство [2] содержит два пассивных измерительных устройства, которые измеряют интенсивность излучения, принимаемого вдоль сигнатуры, которая сканирует в вертикальной плоскости. Они расположены на некотором расстоянии друг от друга и размещаются на общей вертикальной оси и приводятся во вращательное движение около этой общей оси, так что их сигнатурные плоскости совпадают. Каждое из следящих устройств включает в себя мозаику элементарных детекторов, например, измеряющих интенсивность сигнала от пикселей, находящихся в зоне анализа в каждом из следящих устройств, и указанная зона, координаты которой измеряются в каждом из следящих устройств, представляет собой средство, обеспечивающее определение координат изображающих пикселей на мозаике ПЗС-матрицы, и таким образом могут быть вычислены путем экстраполяции искомые координаты.
Недостатками устройства [2] являются:
- низкая точность измерения углов, так как измеряются механические повороты приемников;
- необходимость наличия базиса измерений;
- устройство предназначено для определения, в первую очередь, расстояния до объекта методом триангуляции и определения вертикального угла на объект.
Эти недостатки устраняются в заявляемом предложении тем, что в телевизионном устройстве [2], включающем в себя ПЗС-матрицу 1N, объектив 2N и спецвычислитель, телевизионная камера дополнена фильтром для селекции исследуемой спектральной зоны, а перед объективом телевизионной камеры в качестве всенаправленного по азимуту отражателя установлен оптический конус с зеркальным покрытием вершиной к объективу, оптическая ось объектива совмещена с осью конуса, причем образующая конуса может иметь прямолинейную или криволинейную форму, выбираемую в соответствии с требуемой диаграммой направленности по углу места, а точкой начала координат на мишени ПЗС-матрицы является изображение на этой мишени вершины конуса, причем устройство дополнено блоком синхронизации и управления, при этом выход телевизионной камеры соединен с рабочим входом спецвычислителя, а управляющие входы телевизионной камеры и спецвычислителя подключены к соответствующим выходам блока синхронизации и управления.
Блок-схема, поясняющая заявляемое устройство, приведена на фиг. 5 и 1.
Устройство в его простейшем варианте содержит телевизионную камеру 1 (фиг. 5), снабженную фильтром для селекции исследуемой спектральной зоны, а перед объективом 2N (фиг. 1) телевизионной камеры в качестве всенаправленного по азимуту отражателя установлен оптический конус 3.1 (фиг. 5) с зеркальным покрытием вершиной к объективу, причем оптическая ось объектива совмещена с осью конуса. Устройство содержит спецвычислитель 4 и блок 5 синхронизации и управления. Выход телевизионной камеры 1 соединен с рабочим входом спецвычислителя 4, а ее упpaвляющий вход - с соответствующим выходом блока 5 синхронизации и управления.
Заявляемое устройство работает следующим образом.
При помощи оптического конуса 3.1 и объектива 2.1 камеры на мишени ПЗС-матрицы формируется изображение, которое затем преобразовывается в видеосигнал, который после линейной обработки в ТВ камере поступает на спецвычислитель 4, где проходит обработку по следующему алгоритму:
выделяется видеосигнал, соответствующий цели;
определяются координаты изображения цели на телевизионном растре (фиг. 4);
вычисляются номерные координаты пеленга на цель в измерительтном пространстве, изображенном на фиг. 3;
результаты определения пеленга по нескольким измерениям усредняются и поступают адресату с выхода спецвычислителя.
Для обеспечения мультиспектральности возникает необходимость использования нескольких описанных выше устройств, каждое из которых работает в своем спектральном диапазоне. Геометрические характеристики этих устройств строго идентичны и отличаются только спектральными характеристиками.
Блок-схема этого устройства приведена на фиг. 5. Она состоит из N камер, спецвычислителя 4, оптических конусов 3, блока 5 синхронизации и управления и блока 6 буферной памяти.
Работает устройство следующим образом.
Все ТВ камеры синхронно и синфазно экспонируют изображение объекта, затем также синхронно передают видеосигналы на спецвычислитель 4, причем ТВ камера 1 - непосредственно, а все остальные - через блок 6 буферной памяти, в котором параллельные видеосигналы ТВ камер преобразуются в последовательные и затем поступают на спецвычислитель 4. Работа всего устройства синхронизируется и управляется блоком 5 синхронизации и управления.
Выход спецвычислителя 4 является выходом устройства. Ряд камер при этом работает, например, в ультрафиолетовом диапазоне длин волн, а ряд - в инфракрасной области. Диапазоны длин волн не играют роли и их выбор зависит от назначения устройства и области его применения. ТВ камеры расположены таким образом, что образуют одно измерительное пространство. Время проведения одного цикла измерений равно длительности одного кадра. Так как устройство работает практически непрерывно и делает ежесекундно несколько измерений, то качество определения пеленгов на цели, надежность и точность их определения достаточно высоки.
Предлагаемые способ и телевизионное устройство позволяют различать объекты, отражающие или излучающие электромагнитную энергию даже в том случае, если температура наблюдаемого объекта на доли градуса выше температуры окружающего пространства.
Заявляемое телевизионное устройство реализовано в действующем макете и находится в стадии опытно-конструкторской разработки.
Дополнение.
Порядок определения пеленга проиллюстрирован на фиг. 4. Для линейной образующей оптического конуса значение пеленга (т.е. угла между осью ЛА и направлением на цель) определяется из следующего соотношения:
где α - пеленг (диррекционный угол) цели;
x0, y0 - координаты вершины оптического конуса;
xi, yi - координаты текущей точки.
Угол места относительно линии горизонта определяется из соотношений
где β - угол при вершине оптического конуса;
α - угол поля зрения объектива пеленгатора;
H - высота растра преобразователя свет-сигнал (ПЗС-матрицы).
Использованные источники
1. Патент РФ N 2066458, кл. G 01 S 5/16, на изобретение "Способ определения координат источника электромагнитных излучений".
2. Европейский патент N 0379425, кл. G 01 S 5/16, на изобретение "Система для определения положения по крайней мере одной цели методом триангуляции".



Изобретение относится к телевидению. Задачей изобретения является создание всеазимутального пассивного локатора, позволяющего практически мгновенно получать пеленги на воздушные или наземные цели в диапазоне горизонтальных углов от 0 до 360°. Измерительным устройством является телевизионная камера (выполненная, например, на ПЗС-матрице), причем перед объективом установлен оптический конус с зеркальным покрытием вершиной к объективу, оптическая ось которого совмещена с осью конуса, причем образующая конуса может иметь произвольную форму, при этом выбор уравнения образующей конуса позволяет в широких пределах менять "раскрыв" диаграммы направленности пеленгатора в любой плоскости, содержащей его ось. Аппаратная реализация может быть компактной и устойчивой к воздействию механических и климатических факторов, что и является достигаемым техническим результатом. 2 c. и 1 з.п. ф-лы, 6 ил.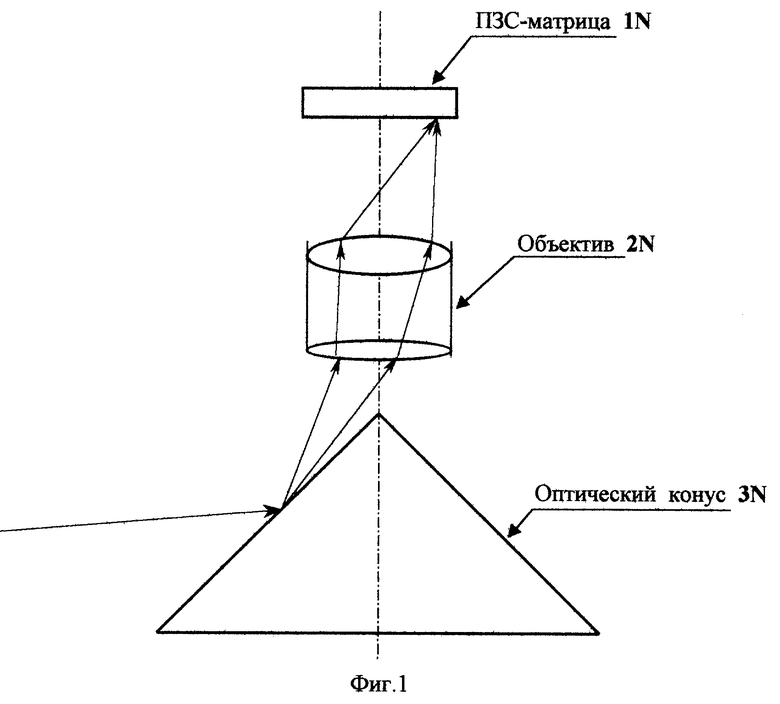
| RU 2066458 С1, 10.09.1996 | |||
| ВСЕСОЮЗНАЯ | 0 |
|
SU379425A1 |
| Блок магнитных головок | 1975 |
|
SU532125A1 |
| US 3828122, 06.08.1974 | |||
| US 4782328 А, 01.11.1988. | |||

