Изобретение относится к области оптико-электронной техники и может быть использовано для хранения эталонного значения азимута.
Известна заявка на изобретение RU 2016119418 «Способ определения угловых координат на источник направленного оптического излучения». Способ основан на применении оптико-электронного координатора с матричным фотоприемником, привязке положения фоточувствительных элементов матричного фотоприемника к декартовой системе координат, приеме излучения источника оптического излучения оптико-электронным координатором с матричным фотоприемником, выделении не менее шести фотоэлементов матричного фотоприемника, сигналы на выходе которых равны между собой, определении их координат и вычислении по их значениям угла места ε и азимута β источника оптического излучения.
В данном способе предполагается считывание источника излучения лишь в одном направлении, тогда как для привязки к струнам обратных отвесов необходимо считывать сигнал с двух противоположенных источников излучения.
Прототип описан во втором независимом пункте формулы патента на изобретение RU 2154284 С1 «Способ пассивного не сканирующего мультиспектрального всеазимутального определения пеленгов и/или координат и телевизионное устройство, реализующее этот способ».
Описанное устройство содержит следующие существенные признаки: телевизионная камера, содержащая ПЗС-матрицу в которой пиксель или группа пикселей представляют собой пассивное измерительное устройство, спец вычислитель, фильтр для селекции исследуемой спектральной зоны и объектив; блок синхронизации и управления; оптический конус с зеркальным покрытием; оптическая ось объектива, совмещенная с осью конуса, причем образующая конуса может иметь прямолинейную или криволинейную форму, выбираемую в соответствии с требуемой диаграммой направленности по углу места, а точкой начала координат на мишени ПЗС-матрицы является изображение на этой мишени вершины конуса; выход телевизионной камеры соединенный с рабочим входом спец вычислителя; управляющие входы телевизионной камеры и спец вычислителя подключены к соответствующим выходам блока синхронизации и управления.
Недостаток данного устройства заключается в том, что используется оптический конус с зеркальным покрытием, который не позволяет определить рассогласование изображений струн обратных отвесов.
Задачей технического решения является исключение погрешности наблюдателя при выставке прибора в плоскость обратных отвесов.
Сущность технического решения заключается в том, что автоматизированный прибор привязки к обратным отвесам (АЛЛ) после соответствующей выставки в плоскость обратных отвесов является хранителем эталонного направления и служит для эталонирования гирокомпасов и других приборов определения азимута, а также исключает из случайных погрешностей человеческий фактор посредством использования прецизионных устройств, таких как пьезоактуатор и ПЗС-матрица.
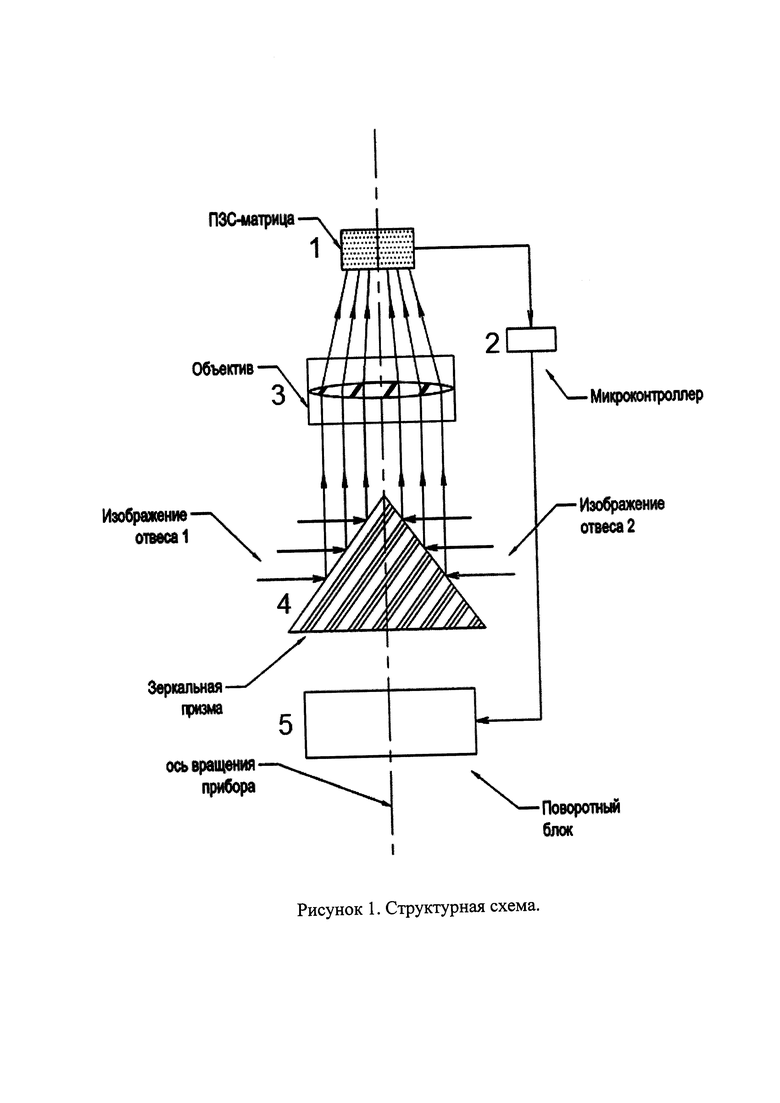
На рисунке 1 показана структурная схема АПП, включающая в себя следующие элементы:
1 - ПЗС-матрица;
2 - Микроконтроллер;
3 - Объектив;
4 - Зеркальная призма;
5 - Поворотный блок;
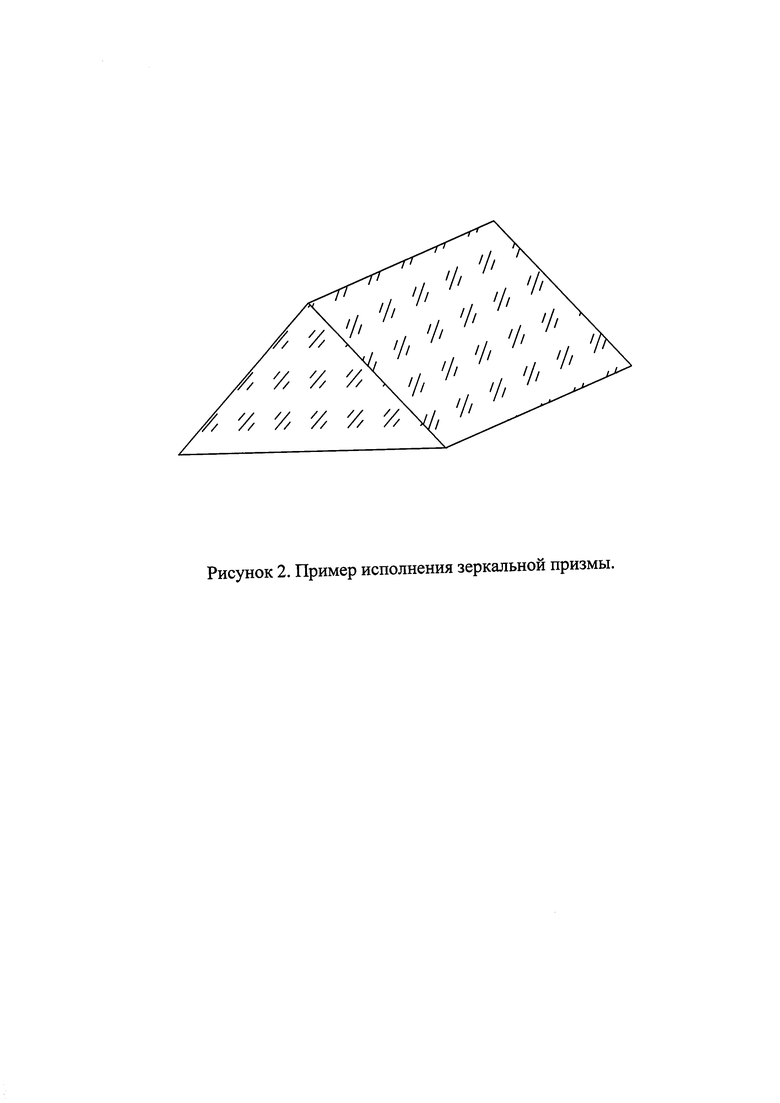
На рисунке 2 показан пример исполнения зеркальной призмы.
АПП устанавливается на специальном рабочем месте, расположенном на развязанном фундаменте, между двумя обратными отвесами так, что его вертикальная ось вращения находится в плоскости, образованной струнами обратных отвесов.
АПП представляет из себя устройство, на вертикальной оси которого расположены: поворотный блок, состоящий из шагового мотора с пьезоактуатором, зеркальная призма, объектив и ПЗС-матрица. ПЗС-матрица связанна цифровым сигналом с микроконтроллером, который связан цифровым управляющим сигналом с поворотным блоком.
АПП привязывается к обратным отвесам следующим образом: В техническом решении используется треугольная зеркальная призма, двугранные углы при основании которой равны 45°, позволяющая проецировать изображения струн обратных отвесов в фокальную плоскость объектива. Изображения обратных отвесов отражаются от зеркальной призмы под прямым углом и проходят через объектив, который фокусирует их на ПЗС-матрице, где энергия фотонов преобразуется в электрический заряд. Электрический заряд усиливается и поступает на обрабатывающий процессор ПЗС-матрицы, который, в свою очередь, преобразовывает электрический заряд в цифровой сигнал.
Микроконтроллер принимает цифровой сигнал с ПЗС матрицы, превращая его в массив данных, вычисляет расстояние между изображениями струн, после чего передает цифровой управляющий сигнал поворотному блоку, для поворота АПП на заданный угол. Если изображения струн не совместились, процесс повторяется до получения нужного результата.
Также микроконтроллер может выводить полученные кадры изображений струн на дисплей, для визуального контроля работы автоматизированного прибора привязки к обратным отвесам.
Поворотный блок обеспечивает возможность вращения АПП вокруг своей оси и необходим для выставки технического решения в плоскость обратных отвесов.
АПП передает азимут следующим образом:
После соответствующей выставки в плоскость образованной обратными отвесами АПП является хранителем эталонного направления и может служить для эталонирования гирокомпасов и других приборов определения азимута. Эталонное направление с АПП передается на эталонируемый прибор посредством автоколлимационной привязки к зеркальным граням оптической призмы или путем измерения угла между нормалью к зеркальной грани АПП и нормалью к контрольному элементу эталонируемого прибора. Во втором случае измерение угла производится автоколлимационным теодолитом.
Технический результат автоматизированного прибора привязки к обратным отвесам заключается в высокой точности съема азимута плоскости путем исключения погрешности наблюдателя при выставке прибора в плоскость обратных отвесов.
По итогам описанного, заявлен автоматизированный прибор привязки к обратным отвесам, содержащий объектив, фокусирующий изображение на ПЗС-матрицу, в которой каждый фоточувствительный элемент имеет свои уникальные координаты, в котором дополнительно введены микроконтроллер, поворотный блок и зеркальная призма, при этом ПЗС-матрица предназначена для преобразования энергии фотонов в цифровой сигнал, приходящий на микроконтроллер и содержащий информацию о координатах затемненных пикселей, микроконтроллер предназначен для вычисления необходимого угла поворота прибора, в зависимости от пришедшего цифрового сигнала, и передачи соответствующего цифрового управляющего сигнала поворотному блоку, состоящему из шагового мотора с пьезоактуатором, а зеркальная призма, выполнена с двугранными углами под 45° при основании.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПРИВЯЗКИ К ОБРАТНЫМ ОТВЕСАМ | 2022 |
|
RU2795846C1 |
| ХРАНИТЕЛЬ НАПРАВЛЕНИЯ | 1988 |
|
RU1573985C |
| Устройство для измерений мгновенных угловых перемещений качающейся платформы | 2016 |
|
RU2642975C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЗИРОВАННОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ СТРУННЫХ ОТВЕСОВ ГИДРОТЕХНИЧЕСКИХ СООРУЖЕНИЙ | 2004 |
|
RU2262665C1 |
| АБСОЛЮТНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА (ВАРИАНТЫ) | 2009 |
|
RU2419067C2 |
| ОПТИКО-ЭЛЕКТРОННОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КОНЦЕНТРАЦИИ ГАЗОВ | 2015 |
|
RU2582307C1 |
| БЕСКОНТАКТНЫЙ ТРЕХКООРДИНАТНЫЙ ИЗМЕРИТЕЛЬ | 2000 |
|
RU2191348C2 |
| ВИДЕОСИСТЕМА ДЛЯ РЕГИСТРАЦИИ НЕШТАТНЫХ СИТУАЦИЙ НА СУДОХОДНЫХ РЕКАХ | 2014 |
|
RU2574517C2 |
| СПОСОБ ПАССИВНОГО НЕСКАНИРУЮЩЕГО МУЛЬТИСПЕКТРАЛЬНОГО ВСЕАЗИМУТАЛЬНОГО ОПРЕДЕЛЕНИЯ ПЕЛЕНГОВ И/ИЛИ КООРДИНАТ И ТЕЛЕВИЗИОННОЕ УСТРОЙСТВО, РЕАЛИЗУЮЩЕЕ ЭТОТ СПОСОБ | 1999 |
|
RU2154284C1 |
| УСТРОЙСТВО ПАНОРАМНОГО НАБЛЮДЕНИЯ "ДЕНЬ-НОЧЬ" И ТЕЛЕВИЗИОННАЯ КАМЕРА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2555855C1 |
Изобретение относится к области оптико-электронной техники и касается автоматизированного прибора привязки к обратным отвесам. Прибор включает в себя объектив, фокусирующий изображение на ПЗС-матрицу, в которой каждый фоточувствительный элемент имеет свои уникальные координаты, микроконтроллер, поворотный блок и зеркальную призму. ПЗС-матрица предназначена для преобразования энергии фотонов в цифровой сигнал, приходящий на микроконтроллер и содержащий информацию о координатах затемненных пикселей. Микроконтроллер предназначен для вычисления необходимого угла поворота прибора в зависимости от пришедшего цифрового сигнала и передачи соответствующего цифрового управляющего сигнала поворотному блоку, состоящему из шагового мотора с пьезоактуатором. Зеркальная призма выполнена с двугранными углами при основании, равными 45°. Технический результат заключается в повышении точности съема азимута плоскости путем исключения погрешности наблюдателя при выставке прибора в плоскость обратных отвесов. 2 ил.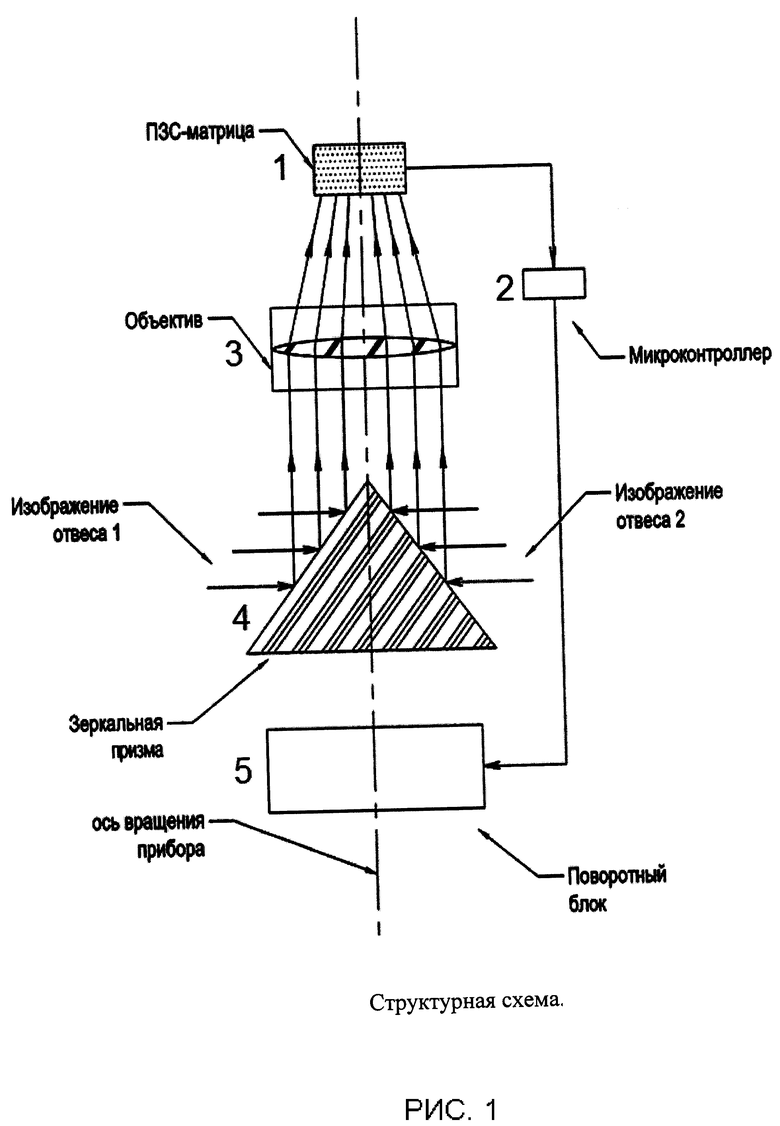
Автоматизированный прибор привязки к обратным отвесам, содержащий объектив, фокусирующий изображение на ПЗС-матрицу, в которой каждый фоточувствительный элемент имеет свои уникальные координаты, отличающийся тем, что дополнительно введены микроконтроллер, поворотный блок и зеркальная призма, при этом ПЗС-матрица предназначена для преобразования энергии фотонов в цифровой сигнал, приходящий на микроконтроллер и содержащий информацию о координатах затемненных пикселей, микроконтроллер предназначен для вычисления необходимого угла поворота прибора в зависимости от пришедшего цифрового сигнала и передачи соответствующего цифрового управляющего сигнала поворотному блоку, состоящему из шагового мотора с пьезоактуатором, а зеркальная призма выполнена с двугранными углами под 45° при основании.
| СПОСОБ ПАССИВНОГО НЕСКАНИРУЮЩЕГО МУЛЬТИСПЕКТРАЛЬНОГО ВСЕАЗИМУТАЛЬНОГО ОПРЕДЕЛЕНИЯ ПЕЛЕНГОВ И/ИЛИ КООРДИНАТ И ТЕЛЕВИЗИОННОЕ УСТРОЙСТВО, РЕАЛИЗУЮЩЕЕ ЭТОТ СПОСОБ | 1999 |
|
RU2154284C1 |
| Устройство для азимутальной ориентации | 1984 |
|
SU1210081A1 |
| US 6453569 B1, 24.09.2002 | |||
| JP H 08278135 A, 22.10.1996. | |||

