Изобретение относится к приборостроению, а именно к технике измерения оптических характеристик атмосферы с целью определения высоты обнаружения взлетно-посадочной полосы (ВПП) в интересах метеорологического обеспечения полетов авиации. В настоящее время в практике метеорологического обеспечения полетов авиации высота обнаружения ВПП оценивается по результатам измерений высоты нижней границы облаков.
Большая пространственно-временная изменчивость облаков требует применения статистических методов обработки непрерывного ряда измерений для получения устойчивых выходных данных, пригодных для краткосрочного прогноза, условий видимости ВПП пилотом воздушного судна.
Осреденение результатов измерений как метод повышения устойчивости выходных данных непригоден для использования при двухслойной облачности с разрывами, поскольку даст промежуточный результат, не совпадающий с положением нижней границы облаков.
Специальные методы обработки, используемые в метеорологии, изложены в работах [1, 2].
Наиболее близким по технической сущности к предлагаемому изобретению является способ, изложенный в работе [3]. Этот способ основан на светолокационном методе измерения высоты облаков и состоит в получении из ряда непрерывных измерений с шагом, равным периоду зондирования, скользящей выборке за интервал наблюдения, упорядочивании выборки в порядке возрастания (убывания) значений результатов и определении нитей границы облаков по значению расстояния Ri для результата измерения, соответствующего i номеру порядковой статистики.
Прототип дает устойчивые выходные данные в условиях однослойной облачности, даже при наличии разрывов облачного слоя. При многослойной разорванной облачности имеет место систематическая погрешность, зависящая от коэффициента сплоченности облачных слоев. Кроме того, прототип не решает задачу выявления облачных слоев.
Задача изобретения заключается в повышении достоверности и информативности выходных данных в условиях многослойной разорванной облачности.
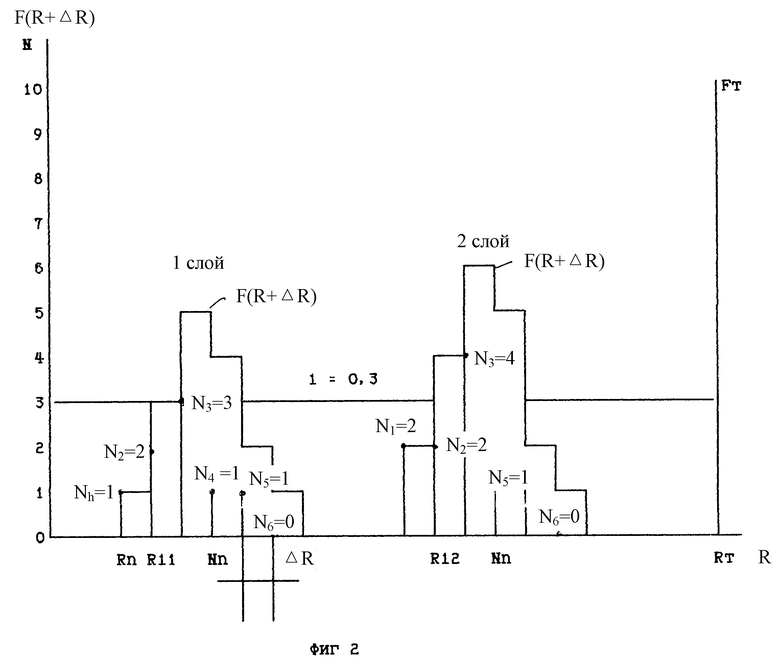
Решение поставленной задачи в предлагаемом способе обнаружения облачных слоев и определения высоты их нижней границы заключается в том, что проводят светолокационные непрерывные измерения с шагом, равным периоду зондирования, из N измерений, соответствующих N зондированиям за интервал наблюдения, формируют выборку, которую упорядочивают в порядке возрастания (убывания) значений высот R. Предлагаемый способ отличается от прототипа тем, что последовательно сканируют весь диапазон измеренных высот с шагом ΔR, равным допускаемому значению относительной погрешности измерений. Суммируют число измерений, попадающих в каждые соседние два интервала ΔR, и формируют функцию повторяемости результатов измерений F(R). Определяют высоты нижних границ облачных слоев по значениям высот Ri, для которых значение функции F(R+ΔR) на ее возраставших участках равно или превышает заданный уровень пороговой статистики i, равный 0,3-0,5 N.
Преобразование упорядоченной выборки в порядке возрастания (убывания) значений высот R в функцию повторяемости результатов измерений за интервал ΔR, равный допускаемому значению относительной погрешности измерений, позволяет исключить из массива данных ложные измерения как метеорологического, так и не метеорологического происхождения, не относящиеся к данному слою облаков, так как в статическую обработку включаются только те результаты измерения, которые группируются в интервале 2 ΔR (т.е. от R до R+ΔR ). Это повышает достоверность результатов измерений.
Определение высоты нижней границы облачного слоя по значениям результатов измерений Ri при их повторяемости, большей чем значение порядковой статистики i (0,5 - 0,5 N), обеспечивает устойчивость выходных данных при наличии разрывов в облачном слое.
Принципиальная схема устройства для реализации способа показана на фигуре 1, на фигуре 2 изображен график функции повторяемости на примере двухслойной облачности.
Как видно из фигуры 1, устройство содержит источник лазерных световых импульсов 1, приемник эхо-сигналов 2, оптическую систему 3, формирователь запускавших импульсов 4, хронизатор 5, блок обработки эхо-сигналов 6, измеритель временных интервалов 7, блок статистической обработки измерений 8, содержащий три оперативных запоминавших устройства 9, 10, 11, две схемы сравнения 12, 13, буферное устройство 14 и схему управления 15. Блок 8 имеет информационный (входы ОЗУ 1-9) и управляющий (вход схемы управления 15) входы.
При этом, как видно из рисунка, выход формирователя запускавших импульсов 4 соединен с источником света 1, который через хронизатор 5 связан с первым входом измерителя временных интервалов 7, приемник световых импульсов 2 через блок обработки эхо-сигналов 6 соединен с вторым входом измерителя временных интервалов 7. В блоке статистической обработки результатов измерений 8 соединены последовательно первое 039 9, первая схема сравнения 12, второе ОЗУ 10, вторая схема сравнения 13, третье ОЗУ 11 и буферное устройство 14. При этом управляющие входы первого 9, второго 10, третьего 11 ОЗУ, первой 12 и второй 13 схем сравнения, буферного устройства 14 соединены с выходом схемы управления 15. Выходы второго 10 и третьего 11 ОЗУ соединены обратной связью с вторыми входами первой 12 и второй 13 схем сравнения. Вход схемы управления 15 является первым входом блока статистической обработки 8 и связан с выходом хронизатора 5. Вход первого ОЗУ 9 является вторым входом блока статистической обработки 8, связан с выходом измерителя временных интервалов 7 и первым выходом устройства. Выход буферного устройства 14 является выходом блока статистической обработки 8 и является вторым выходом устройства.
Блок 8 может быть реализован, например, на ОЗУ серии 537, 132a цифровых ИМС серии 1533, 1564. При использовании в составе прибора микропроцессора или однокристальной ЭВМ алгоритм статистической обработки может быть реализован программно с использованием в качестве ОЗУ (9, 10, 11) определенных областей ОЗУ процессорной системы.
На фигуре 2 введены следующие обозначения:
F(R+ΔR) - функция повторяемости результатов измерений;
R - измеряемые значения высоты;
ΔR - интервал выборки;
Rn - текущие значения высоты облачных слоев;
N - число измерений (объем выборки, массива данных);
Nn - количество измерений в текучем интервале высот ΔR на высоте Rn;
i - уровень порядковой статистики (0,3 - 0,5 N);
Ri - измеряемое значение высот нижних границ облачных слоев;
Fт - пример функции повторяемости при зондировании твердой цели на высоте Rт.
Обнаружение облачных слоев и определение высоты их нижней границы при использовании вышеописанного устройства осуществляется следующим образом. Источник света 1 излучает короткие ( ~ 30 нс) мощные ( ~ 500 кВт) зондирующие импульсы света в направлении облачного слоя атмосферы. Период следования импульсов определяется формирователем запускающих импульсов 4. Рассеянные облаком эхо-сигналы возвращаются в приемник 2. Оптическая система 5 обеспечивает требуемую геометрию диаграмм направленности излучателя и приемника [3]. В блоке обработки 6 эхо-сигналы усиливаются, фильтруются и сравнивается с пороговым уровнем. Сигнал, превышающий пороговый уровень, поступает на измеритель временных интервалов 7, другой вход которого подключен к хронизатору 5. Хронизатор 5 содержит фотодиод и формирует синхроимпульсы в моменты излучения световых импульсов источником света 1. По времени запаздывания эхо-сигнала, превысившего пороговый уровень, относительно зондирующего светового импульса измеритель временных интервалов 7 формирует результат измерения в цифровой форме. Выход измерителя временных интервалов 7 является первым выходом устройства.
Результаты измерений на первом выходе устройства подвергаются дополнительной статистической обработке. Первое ОЗУ 9 регистрирует результаты измерений в хронологическом порядке за текущий интервал наблюдения Т. С выхода измерителя временных интервалов 7 сигнал в цифровом виде поступает на вход первого ОЗУ 9 и записывается в очередную его ячейку. В зависимости от плотности распределения значений результатов измерений в исходной выборке данных в одну ячейку может быть сделана многократная запись, то есть записано целое число больше 1 (фиг. 2). Используемый объем первого ОЗУ определяется анализируемым интервалом наблюдения, который более чем на порядок величины превышает период зондирующих световых импульсов. Информация о каждом единичном результате измерения Rn располагается в первом ОЗУ 9 в хронологическом порядке, и очередной результат записывается на место самой последней записи. В интервале между зондирующими импульсами последовательным сравнением на цифровой первой схеме сравнения 12 производится сортировка записанных на первом ОЗУ 9 результатов измерений Rn и размещение их во втором ОЗУ 10 в виде упорядоченной выборки не в хронологическом порядке, а в порядке возрастания (убывания) значений Rn с шагом дискретизации, равным разрешающей способности по дальности (например, R = 7,5 м). Используемый объем второго ОЗУ 10, то есть число используемых ячеек памяти, равен отношению Rmax/ΔR, где Rmax - верхняя точка диапазона измерения. Например, при Rmax = 1500 метров число используемых ячеек памяти равно 1500/7,5 = 200. Таким образом, порядковый номер ячейки памяти соответствует определенному значению Rn. В сотую ячейку памяти записывается результат измерения, соответствующий высоте облаков 750 метров. В каждую ячейку записывается 1 или 0 в зависимости от наличия (отсутствия) соответствующего значения результата измерения в исходной выборке данных, записанных в первом ОЗУ 9. Считывание в третье ОЗУ 11 происходит после формирования упорядоченной выборки по градациям высот с помощью второй цифровой схемы сравнения 13. В общем случае градации высот могут быть неравномерными и увеличиваться пропорционально результату измерения. В упрощенном варианте градация остается неизменной по всему диапазону и составляет
2ΔR = 27,5 = 15 м.
Если при скользящем просмотре двух соседних ячеек памяти в порядке возрастания сумма записанных чисел превысит установленный номер порядковой статистики, например 3, при периоде наблюдения, состоящем из 10 зондировании (30% статистика), то в третье ОЗУ 11 записывается результат, равный Ri + 15 м, где Ri - скользящее с шагом дискретизации значение высоты.
Таким образом, обнаружение облачных слоев с помощью экстремумов функции повторяемости позволяет эффективно разделять измерения по принадлежности к близко расположенным облачным слоям. Обнаружение дополнительных облачных слоев повышает достоверность прогноза условий видимости ВПП. Уменьшение вероятности ложного обнаружения облачных слоев позволяет по отсутствию слоев, но при наличии эхо-сигнала судить о наличии осадков в виде дождя и снега.
Литература
1. Пановский Г. А. , Брайер Г.В. Статистические методы в метеорологии. Ленинград, Гидрометеоиздат, 1972, стр. 209.
2. Персин С.И. Измерение высоты нижней границы облаков и характеристик облачности как задача распознавания образов. Труды ГГО. 1987, выпуск 512, стр. 79-91.
3. Круглов Р. А. Статистический метод обнаружения низкой облачности в системах автоматизированного метеорологического обеспечения аэродромов. Труды ГГО, 1980. выпуск 413. стр. 108-115 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СВЕТОЛОКАЦИОННЫЙ ИЗМЕРИТЕЛЬ ВЫСОТЫ НИЖНЕЙ ГРАНИЦЫ ОБЛАКОВ | 1997 |
|
RU2136016C1 |
| СПОСОБ И УСТРОЙСТВО ИСКУССТВЕННОГО РЕГУЛИРОВАНИЯ ОСАДКОВ | 2013 |
|
RU2563933C2 |
| СПОСОБ УМЕНЬШЕНИЯ ОБЛЕДЕНЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2002 |
|
RU2228883C2 |
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ ТУМАНА И ОБЛАКОВ | 1993 |
|
RU2045164C1 |
| СПОСОБ СВЕТОЛОКАЦИОННОГО ИЗМЕРЕНИЯ ВЫСОТЫ ОБЛАЧНЫХ СЛОЕВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2361237C2 |
| СПОСОБ РАДИОТЕХНИЧЕСКОГО ОБНАРУЖЕНИЯ СМЕРЧА | 2005 |
|
RU2339971C2 |
| СПОСОБ ИНИЦИИРОВАНИЯ ГРОЗОВЫХ РАЗРЯДОВ | 2013 |
|
RU2541661C2 |
| УНИВЕРСАЛЬНЫЙ ПИРОТЕХНИЧЕСКИЙ СОСТАВ ДЛЯ ИЗМЕНЕНИЯ АТМОСФЕРНЫХ УСЛОВИЙ | 2014 |
|
RU2583070C1 |
| СПОСОБ БОРЬБЫ С ЗАСУХОЙ ИСКУССТВЕННЫМ ВЫЗЫВАНИЕМ ОСАДКОВ | 2015 |
|
RU2578537C1 |
| АНАЛИЗАТОР-ИЗМЕРИТЕЛЬ СОСТОЯНИЯ СЛОЯ ВОДЫ/ЛЬДА С ПРИМЕСЯМИ НА ДОРОЖНОЙ ПОВЕРХНОСТИ | 2011 |
|
RU2464580C1 |
Способ обнаружения облачных слоев и определения высоты их нижней границы относится к приборостроению, а именно к технике измерения оптических характеристик атмосферы с целью определения высоты обнаружения взлетно-посадочной полосы в интересах метеорологического обеспечения полетов авиации. Достигаемый технический результат - повышение достоверности и информативности выходных данных в условиях многослойной разорванной облачности. Упомянутый способ заключается в том, что проводят светолокационные непрерывные измерения с шагом, равным периоду зондирования, из N измерений, соответствующих N зондированиям за интервал наблюдения, формируют выборку, которую упорядочивают в порядке возрастания или убывания значений высот R, последовательно сканируют весь диапазон измеренных высот с шагом ΔR, равным допускаемому значению относительной погрешности измерений, суммируют число измерений, попадающих в каждые соседние два интервала ΔR, и формируют функцию повторяемости результатов измерения F(R), определяют высоты нижних границ облачных слоев по значениям высот Ri, для которых значение функции F(R+ΔR) на ее возрастающих участках равно или превышает заданный уровень порядковой статистики i, равный 0,3-0,5 N. 2 ил.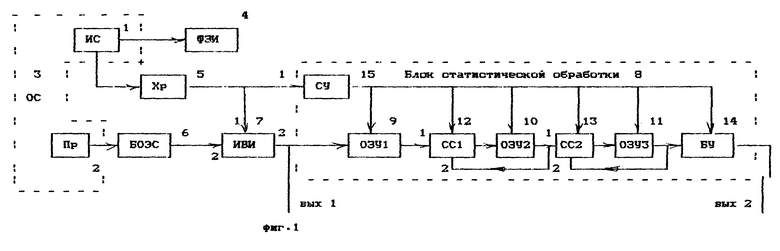
Способ обнаружения облачных слоев и определения высоты их нижней границы, заключающийся в том, что проводят светолокационные непрерывные измерения с шагом, равным периоду зондирования, из N измерений, соответствующих N зондированиям за интервал наблюдения, формируют выборку, которую упорядочивают в порядке возрастания или убывания значений высот R, отличающийся тем, что последовательно сканируют весь диапазон измеренных высот с шагом ΔR, равным допускаемому значению относительной погрешности измерений, суммируют число измерений, попадающих в каждые соседние два интервала ΔR, и формируют функцию повторяемости результатов измерения F(R), определяют высоты нижних границ облачных слоев по значениям высот Ri, для которых значение функции F(R+ΔR) на ее возрастающих участках равно или превышает заданный уровень порядковой статистики i, равный 0,3 - 0,5 N.
| КРУГЛОВ В.А | |||
| Статистический метод обнаружения низкой облачности в системах автоматизированного метеорологического обеспечения аэродромов | |||
| Труды ордена Трудового Красного знамени Главной геофизической обсерватории им.А.И.Воейкова | |||
| - Л.: Гидрометеоиздат, 1980, вып.413, с.108-113 | |||
| ПЕРСИН С.М | |||
| Измерение высоты нижней границы облаков и характеристик облачности как задача распознавания образов | |||
| Труды ордена Трудового Красного знамени Главной геофизической обсерватории им.А.И.Воейкова | |||
| - Л.: Гидрометеоиздат, 1987, вып.512, с.79-91 | |||
| СВЕТОЛОКАЦИОННЫЙ ИЗМЕРИТЕЛЬ ВЫСОТЫ НИЖНЕЙ ГРАНИЦЫ ОБЛАКОВ | 1997 |
|
RU2136016C1 |
| УСТРОЙСТВО ЛАЗЕРНОГО ЗОНДИРОВАНИЯ АТМОСФЕРЫ | 1996 |
|
RU2120648C1 |
| Измеритель высоты нижней границы облаков | 1975 |
|
SU598390A1 |
| DE 3151333 A1, 14.07.1983. | |||

