(54) ИЗМЕРИТЕЛЬ ИЮОТЫ НИЖНЕЙ ГРАНИЦЫ ОБЛАКОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Измеритель высоты нижней границы облаков | 1981 |
|
SU995049A1 |
| Измеритель высоты нижней границы облаков | 1972 |
|
SU443252A1 |
| Измеритель высоты нижней границы облаков | 1980 |
|
SU943624A1 |
| Электронные часы с коррекцией | 1978 |
|
SU769482A1 |
| Регенератор стартстопных телеграфныхСигНАлОВ | 1979 |
|
SU815956A1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ИЗДЕЛИЙ С ИЗМЕНЯЮЩЕЙСЯ ТОЛЩИНОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2044314C1 |
| Цифровые вторичные часы-хронометр | 1979 |
|
SU845141A1 |
| Преобразователь перемещения в код | 1989 |
|
SU1777240A1 |
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ И ЛАЗЕРНОЕ ЛОКАЦИОННОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2183841C1 |
| МОНОИМПУЛЬСНАЯ РЛС | 2004 |
|
RU2267137C1 |
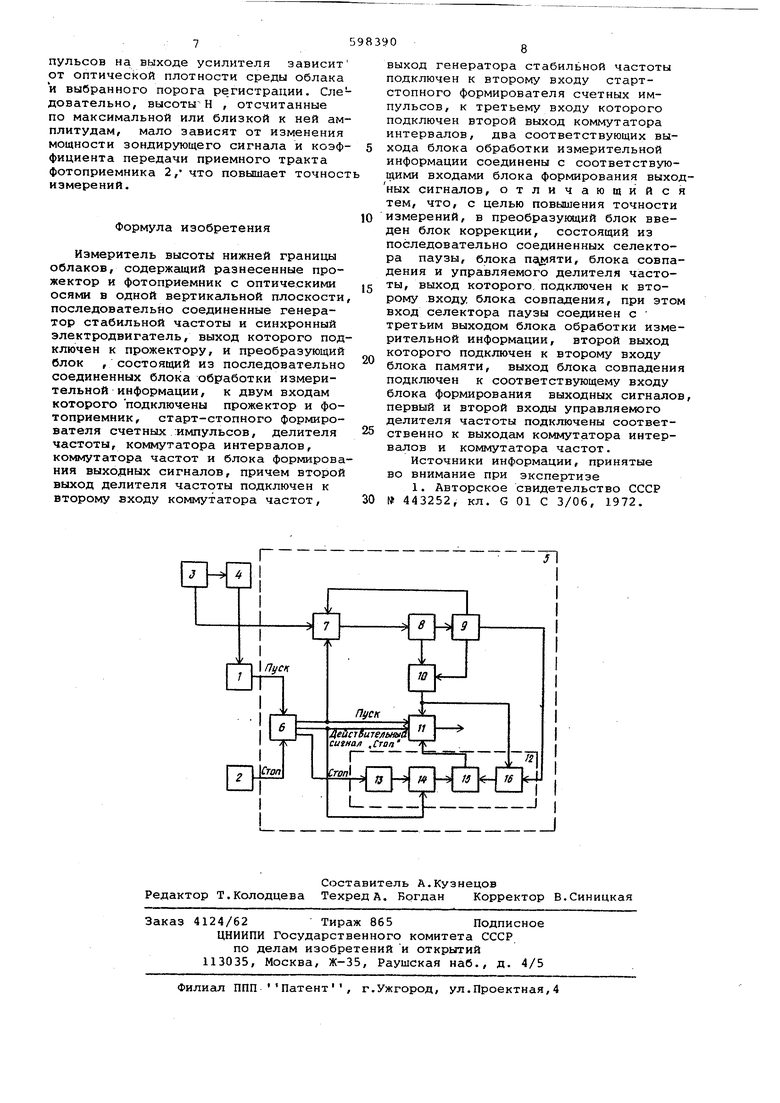
Изобретение относится к радиолокации и может использоваться в мете рологии . Известен измеритель высоты нижне границы облаков, содержащий разнесенные прожектор и фотоприемник с оптическими осями в одной вертикаль ной плоскости, последовательно соединенные генератор стабильной частоты и синхронный электродвигатель, выход которого подключен к прожекто ру, и преобразующий блок, состоящий из последовательно соединенных блока обработки измерительной информации, к двум входам этого блока подключены прожектор и фотоприемник старт-стопного формирователя счетных импульсов, делителя частоты, коммутатор интервалов, коммутатора частот .и блока формирования выходных сигналов, причем второй выход делителя частоты подключен к второму входу коммутатора частот, выход генератора стабильной частоты подключен к второму входу старт-стопного формирователя счетных импульсов, к третьему входу которого подключен второй выход коммутатора интервалов два соответствующих выхода блока обработки измерительной информации соединены с соответствующими входами блока формирования выходных сигналов 1 . Однако известный измеритель имеет низкую точность измерений. Цель изобретения - повышение точности измерений. Для этого в предлагаемый измеритель высоты нижней границы облаков введен в преобразующий блок коррекции, состоящий КЗ последовательно соединенных селекторов паузы,блока памяти, блока совпадения и управляемого делителя частоты, выход которого подключен к второму входу блока совпадения , при этом вход селектора паузы соединен с третьим выходом блока обработки измерительной информации, второй выход которого подключен к второму входу блока памяти, выход блока совпадения подключен к соответствующему входу блока формирования выходных ситналов, первый и второй входы управляемого делителя частоты подключены соответственно к выходам коммутатора интервалов и коммутатора частот. На чертеже приведена структурная схема предлагаемого измерителя.
Измеритель высоты нижней границы облаков содержит разнесенные прожектор 1 и фотоприемник 2 с оптическими осями в одной вертикальной плоскости, последовательно соединенные . генератор 3 стабильной частоты и синхронный электродвигатель 4, выход которого подключен к прожектору 1, и преобразующий блок 5, состоящий из последовательно соединенных блока 6 обработки измерительной информации, к двум входам которого подключены прожектор 1 и фотоприемник 2, стартстопного формирователя 7 счетных импульсов, делителя 8 частоты, коммутатора 9 интервалов, коммутатора 10 частот, блока 11 формирования выходных сигналов, блока 12 коррекции, причем второй выход делителя 8 частоты подключен к второму входу коммутатора 10 частот, выход генератора 3 стабильной частоты подключен к второму входу старт-стопного формирователя 7 счетных импульдов, к третьему входу которого подключен второй выход коммутатора 9 интервалов, два соответствующих выхода блока б обработки измерительной информации соединены с соответствующими входами блока 11 формирования выходных сигналов.
Блок 12 коррекции состоит из последовательно соединенных селектора 13 паузы, блока 14 памяти, блока 15 совпадения -и управляемого делителя 16 частоты, выход которого подключе к второму входу блока 15 совпадения, при этом вход селектора 13 паузы соединен с третьим выходом блока 6 обработки измерительной информации, второй выход которого прдключен к второму входу блока 14 памяти, выход блока 15- совпадения подключен к соответствующему входу блока 11 формирования выходных сигналов, первый и второй входы управляемого делителя 16 частоты подключены соответственно к выходам коммутаторов 9 и 10.
Измеритель высоты нижней границы облаков работает следуквдим образом.
Начало измерительного цикла соответствует тому моменту времени, когда оптическая ось сканирукнцего устройства прожектора 1 совпадает с горизонталью. В этот момент времени от датчика прожектора 1 по линии сгвязи посылается сигнал Пуск, который поступает на вход блока б обработки измерительной информации.
Посыпаемые прожектором 1 в атмосферу световые зондирующие сигнгьлы при встрече с оптически плотной средой рассеиваются в ней. Фотоприемник 2 воспринимает световой сигнал, если пятно рассеянного света находится в его поле зрения, а интенсивность рассеянного света в этом направлении превышает некоторый пороговый уровень. С выхода фотоприемника 2 сформированные сигналы
Стоп посыпаются по линии связи на другой вход бпока 6 обработки измерительной информации. Сканирующее устройство прожектора 1 сканирует в пределах угла 0-90. Синхронная работа прожектора 1 и преобразующего блока 5 достигается за счет применения генератора 3 стабильной частоты, импульсы с выхода которого используются, с одной стороны, для формирования счетных импульсов по высоте в преобразующем блоке 5, ас другой - для питания обмоток синхронного электродвигателя 4 привода сканирующего устройства прожектора 1. Синфазная работа прожектора 1 и преобра5 зующего блока 5 достигается за счет посылки каждый раз в начале измерительного цикла фазирующего импульса от датчика прожектора 1.
Сигналы Пуск и Стоп (электрический эквивалент отраженного от нижней границы облаков светового сигнала) , пришедшие по линии связи от прожектора 1 и Фотоприемника 2, воздействуют на блок 6 обработки иэс мерительной информации. На выходе счетчика стоповых сигналов, входящего в блок 6 обработки измерительной информации, формируется действительный сигнал Стоп, если в течение заданного промежутка времени t задержки в нем накапливается определенное число стоповых сигналов, следукадих в этом случае с временным интервалом, равным периоду зондирующих импульсов.
На выходе блока 6 обработки измерительной информации формируются сигналы Пуск, Стоп и действительный сигнал Стоп.
Пусковой сигнал разрешает прохож 0 дение импульсов от генератора 3 стабильной частоты на выход стартстопного формирователя 7 счетных импульсов. Ввиду нелинейной зависимости измеряемой в лcoты нижней границы облаков от угла поворота сканирукадего устройства прожектора 1 частота следования счетных импульсов переменна и растет с увеличением уг,ла поворота сканирующего устройства. СП Изменение частоты следования счетных импульсов происходит в дискретные моменты времени, причем меняется как частота следования импульсов от одного временного интервала к другому, так и длительность самих интервалов.
Следовательно, с появлением на выходе блока 6 обработки измерительной информации сигнала Пуск начинается прохождение счетных импульсов, следующих в число-импульсном коде на 60 выход блока 11 формирования вьссодных сигналов. Счетные импульсы воздействуют на этот блок с выхода коммутатора 10 частот.
В момент формирования на выходе 65 блока 6 обработки измерительной информации действительного сигнала Стоп прекращается прохождение счетных импульсов, следующих с выхо да коммутатора Ю частот на выход блока 11 формирования выходных сигналов, С этого момента счетные импульсы начинают проходить на выход блока 11 формирования выходных сих налов с выхода блока 12 коррекции. Появление действительного сигнал Стоп соответствует моменту встр чи зондирующего луча с нижней грани цей облака, а число счетных импуль сов, прошедшее на выход преобразую щего блока 5 до этого момента, экви валентно (в некотором масштабе) высоте места встречи зондирующего лу ча с нижней границей облака в напра лении оптической оси зеркала фотопри емника 2. ; Блок 12 коррекции вступает в рабо ту в момент появления действительног сигнала Стоп, который воздействует на блок 14 памяти, выходной сигнал с последнего управляет блоком 15 совпадения таким образом, что в момент его прихода через блок 15 сов падения счетные импульсы проходят на блок 11 формирования выходных сигналов . Частота следования счетных импульсов на входе f и выходе блока 12 коррекции различна. Преобразование частоты следования счетных импульсов осуществляется управляемым делителем 16 частоты так, что 4 - t Bbix fi ВХ I где n - коэффициент деления управляе мого делителя 16 частоты (коэффициен коррекции) .Коэффициент деления п устанавливается в зависимости от диапазона из меряемых высот. Для изменения коэффициента деления управляемого делителя 16 частоты от коммутатора интер валов 9 поступают управляющие импуль сы. Все сигналы Стоп, сформирован ные на выходе блока 6 обработки изме рительной информации, попадают на селектор 13 паузы. Сигнал Стоп переводит этот селектор в неустойчивое состояние (состояние возбуждения) , длительность которого определяется из неравенства тТ ТГ.,„()Т где Т - период следования зондирующих импульсов; tg - длительность импульса селек тора 13 паузы; щ - пострянный коэффициент, который выбирается в зависимости от частоты следования зондирующих импуль сов, причем т«1,2,3. .. Если стоповые сигналы следуют с периодом тТ, то селектор 13 паузы возбужден. В устойчивое состояние селектор 13 паузы возвраедается в том случае, когда очередной стоповый сигнал появляетс 1 на его входе спустя время t tj, .I Для исключения погрешности блока 12 коррекции длительность нсустойчи,вого состояния селектора 13 паузы равЭто условие необходимо, так как начало процесса функционального преобразования, выполняемого преобразующим блоком 5, сдвинуто относи ельно начала измерительного цикла на время Tj . Сдвиг процесса преобразования осуществляется блоком 6 обработки измерительной информации. По возвращении селектора 13 паузы в устойчивое состояние на его выходе формируется импульс, который переводит блок 14 памяти в исходное положение . Импульс, формируемый в этот момент на выходе блока 14 памяти, воздействует на блок 15 совпадения, в результате чего прекращается прохождение счетных импульсов через блок 15 совпадения на блок 11 формирования выходных сигналов. В момент окончания измерительного цикла с коммутатора 9 интервалов посылается импульс, запрещающий прохождение счетных импульсов ,на выход старт-стопного формирователя 7 счет ных импульсов. Таким образом, к числу счетных импульсов, прошедших Wa выход преобразующего блока 5 до появления дейсти опревительного сигнала деляющих высоту места встречи зондирующего луча с нижней границей облака, добавляется некоторое число счетных импульсов, прошедшее на выход преобразующего блока 5 через блок 12 коррекции за интервал времени от момента появления действительного сигнала Стоп до момента исчезновения стоповых сигналов. В этом случае высота Н нижней границы облаков определяется из выраженияН+К-й - , где Н - скорректированное значение высоты нижней границы облаков; NJ - число счетных импульсов, соответствующее глубине проникновения зондирующего луча в среду облака. Разнь№ значениям соответствуют азные значения высот, каждая из коорялх, в свою очередь, определяет ысоту некоторой поверхности в среде блака. При вхождении зондирующего луча в реду облака наблюдается постепенное арастание, а, затем постепенный пад амплитуд импульсов на выходе силителя фотоприемника 2, т.е расределение амплитуд имеет колоколообазную форму. Глубина проникновения этом йлучае определяется временем рисутствия на выходе усилителя фоториемника 2 сигналов от нижней граниы облаков. Время присутствия им
