Предпосылки создания изобретения
Изобретение относится к рабочему механизму многополюсного автоматического выключателя низкого напряжения с высокой электродинамической силой, содержащему электрическую силовую цепь, имеющую на полюс пару скомпенсированных контактов, удерживаемых в замкнутом положении под действием электродинамической компенсации сил отталкивания, при этом упомянутый механизм удерживается рамой и содержит:
- переключающее устройство, связанное с расцепляющим крюком и с работающей на размыкание пружиной для перемещения подвижного контакта в разомкнутое положение, когда крюк переводится из нагруженного положения в положение расцепления,
- коммутационный стержень, изготовленный из изоляционного материала, подсоединенный к переключающему устройству, проходящий поперечно раме и содержащий поворотный валик, удерживающий подвижные контакты всех полюсов,
- размыкающий храповой механизм, взаимодействующий с расцепляющим крюком для обеспечения нагружения или расцепления механизма соответственно в положении зацепления или расцепления упомянутого храповика и
- захват, управляемый размыкающим компонентом для приведения размыкающего храпового механизма в положение расцепления.
Механизм указанного типа описан в документе EP-A-222645. Электродинамическая сила автоматического выключателя является результатом действия пружин контактного давления на большое количество пальцев и компенсационных контактов, шарнирные оси которых подвергаются действию значительных механических реакций. Механизм способен противостоять этим реакциям до максимального порога тока короткого замыкания. Сверх этого порога реакции могут повредить определенные оси или передаточные компоненты механизма, а также может увеличиться сила расцепления на уровне каскада, содержащего крюк, размыкающий храповой механизм и захват. При работе размыкающего устройства мгновенного действия требуется быстродействие порядка 10 мс, с тем чтобы обеспечить размыкание механизма, которое является весьма продолжительным, если эксплуатационные характеристики выключателя должны отвечать требованиям в отношении высокой электродинамической силы и отключающей способности, большей чем 130 кА.
Предложено (см. французский патент FR-A-2239755) использование механической реакции, являющейся результатом электродинамического отталкивания скомпенсированных контактов, для осуществления автоматического размыкания, происходящего посредством блокировочной части, освобождаемой из полумесяца, который остается неподвижным. Фазу повторного приведения в исходное состояние после размыкания при коротком замыкании такого механизма осуществить трудно.
Краткое изложение существа изобретения
Задача изобретения заключается в создании автоматического выключателя с высокой электродинамической силой и высокой отключающей способностью, требующего невысокого размыкающего усилия и короткого времени размыкания, когда происходит короткое замыкание при большом токе.
Механизм согласно изобретению отличается тем, что размыкающий храповой механизм содержит разъединяемые приводные средства, вызывающие самоотцепление захвата при наличии тока короткого замыкания, превышающего оттарированный порог, определяемый гибкими средствами, при этом команда на упомянутое самоотцепление дается механической реакцией, создаваемой посредством эффекта электродинамической компенсации, приводящей к сверхбыстрому повороту захвата для разъединения размыкающего храпового механизма перед срабатыванием расцепляющего компонента.
Согласно другому отличительному признаку изобретения размыкающий храповой механизм содержит удерживающий рычаг, оснащенный носиком, сконструированным для защелкивания на захвате в замкнутом положении и, по меньшей мере, один опорный фланец ролика, взаимодействующего с опорной поверхностью расцепляющего крюка, при этом упомянутые гибкие средства расположены между удерживающим рычагом и фланцем, обеспечивая относительное движение, приемлемое для самоотцепления захвата после того, как превышается оттарированный порог.
Согласно предпочтительному варианту осуществления конструкции удерживающий рычаг шарнирно установлен на поворотной оси размыкающего храпового механизма, при этом фланец содержит рабочий скос, сконструированный для выполнения поворота захвата с тем, чтобы обеспечить упомянутое самоотцепление.
Краткое описание чертежей
Другие преимущества и отличительные признаки будут более очевидны из приведенного ниже описания иллюстративного варианта осуществления изобретения, данного лишь в качестве примера, не налагающего каких-либо ограничений, и представленного на прилагаемых чертежах, на которых:
на фиг. 1 показан схематический вид механизма, снабженного размыкающим храповым механизмом согласно изобретению, при этом контакты представлены в замкнутом положении,
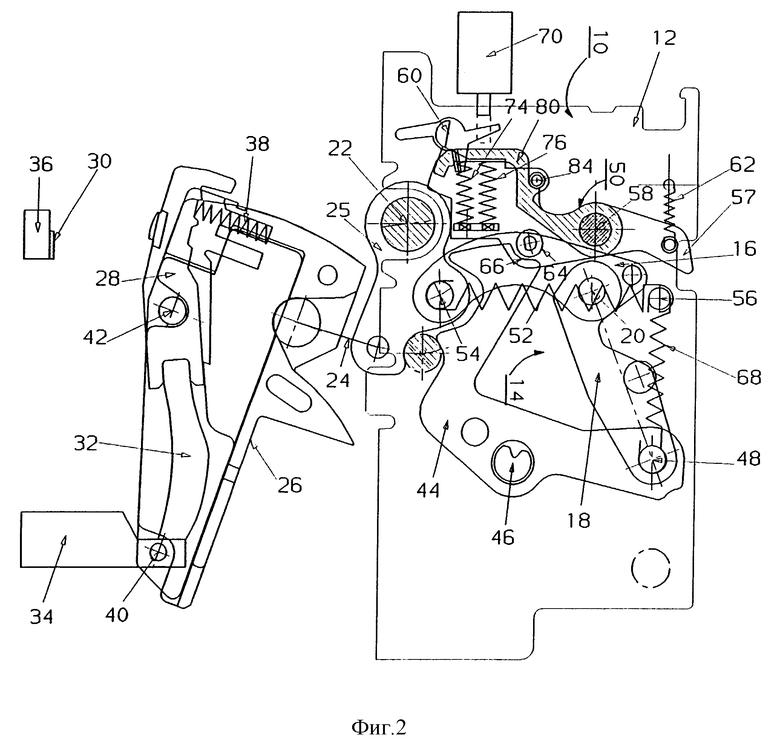
на фиг. 2 показан вид, идентичный виду на фиг. 1, при этом на нем механизм представлен с разомкнутым положением контактов,
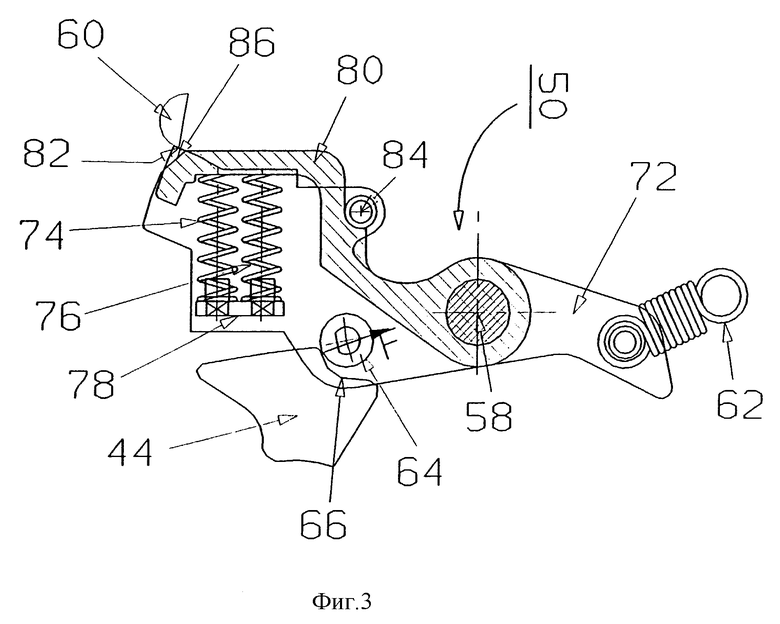
на фиг. 3 размыкающий храповой механизм согласно фиг. 1 показан в разомкнутом положении,
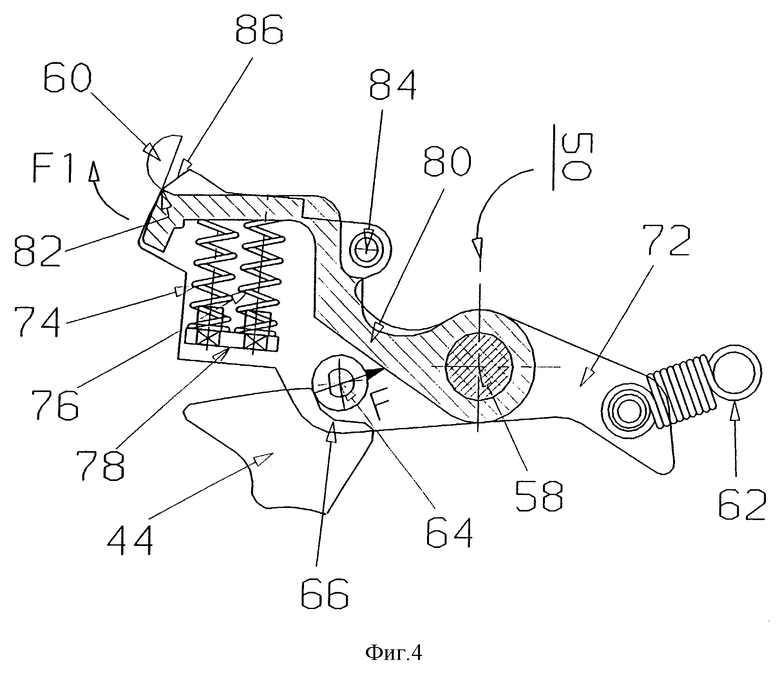
на фиг. 4 показан вид храпового механизма, идентичный виду на фиг. 3, но в фазе самоотцепления захвата.
Если обратиться к фиг. 1 и 2, то рабочий механизм 10 многополюсного автоматического выключателя удерживается рамой 12 и содержит переключающее устройство 14, имеющее пару передаточных стержней 16, 18, шарнирно установленных на поворотной оси 20. Нижний стержень 16 механически подсоединен к коммутационному стержню 22, изготовленному из изоляционного материала и проходящему перпендикулярно фланцам рамы 12. Коммутационный стержень 22 является общим для всех полюсов и образован посредством валика, установленного с возможностью вращения между разомкнутым и замкнутым положениями контактов автоматического выключателя. Автоматический выключатель представляет собой тип выключателя с сильным током и с высокой электродинамической силой.
На уровне каждого полюса расположена система 24 с соединительной тягой, которая соединяет коленчатый рычаг 25 стержня 22 с изоляционной клеткой 26, удерживающей подвижный контакт 28. Подвижный контакт 28 взаимодействует с неподвижным контактом 30 в замкнутом положении и посредством плетеной полосы 32 подсоединен к первой соединительной подушке 34. Неподвижный контакт 30 непосредственно удерживается второй соединительной подушкой 36. Обеспечивающая контактное давление пружина 38 расположена между клеткой 26 и верхней стороной каждого подвижного контакта 28.
Клетка 26 установлена с возможностью поворота вокруг первой оси 40 между закрытым положением и открытым положением, а подвижный контакт 28 содержит большое количество параллельных пальцев, шарнирно установленных на второй оси 42 клетки 26.
С переключающим устройством 14 взаимосвязан расцепляющий крюк 44, установленный с ограниченной возможностью качания на основной оси 46 между нагруженным положением и разомкнутым положением. Основная ось 46 надежно прикреплена к раме 12, при этом один из концов крюка 44 шарнирно установлен на верхней пластине 18 посредством оси 48, в то время как другой, противоположный конец взаимодействует с разъединительным захватом 50.
Работающая на размыкание пружина 52 установлена между втулкой 54 стержня 22 и неподвижным выступом 56 рамы 12, при этом упомянутый выступ 56 расположен над переключающим устройством 14. Размыкающий храповой механизм 50 образован стопорным рычагом 57, шарнирно установленным на оси 58 между положением зацепления и положением расцепления. Захват 60 в форме полумесяца имеет возможность перемещения размыкающего храпового механизма 50 в положение расцепления для выполнения размыкания механизма 10.
Возвратная пружина 62 размыкающего храпового механизма 50 расположена противоположно захвату 60 относительно оси 58 и смещает храповой механизм 50 в направлении против часовой стрелки в положение зацепления. Ролик 64 расположен на стопорном рычаге 57 между осью 58 и захватом 60, и в положении нагружения взаимодействует с опорной поверхностью 66 расцепляющего крюка 44. Опорная поверхность 66 крюка 44 представляет собой углубление, в которое с зацеплением входит цилиндрический ролик 64. Возвратная пружина 68 закреплена между осью 48 и выступом 56 для смещения крюка 44 в направлении против часовой стрелки к положению нагружения, в котором ролик 64 размыкающего храпового механизма 50 находится в зацеплении с углублением опорной поверхности 66.
Захват 60 размыкающего храпового механизма 50 управляется размыкающим компонентом 70 для перемещения стопорного рычага 57 в положение расцепления, приводящего к размыканию механизма 10 и размыканию контактов 28, 30. Размыкающий компонент 70 может быть приведен в действие вручную, то есть посредством нажимной кнопки, или автоматически, то есть посредством магнитотермического или электронного размыкающего устройства, либо посредством шунта, обеспечивающего чувствительность к дистанционному управляющему сигналу.
Согласно изобретению размыкающий храповой механизм 50 установлен в виде расцепляемого узла, обеспечивающего самоотцепление захвата 60 при наличии тока короткого замыкания, превышающего установленный порог, далее называемый порогом разъединения.
Контакты 28, 30 и подушки 34, 36 формируют U-образную цепь, при этом вторая шарнирная ось 42 пальцев подвижного контакта 28 располагается на одной трети расстояния, разделяющего две подушки 34, 36. Конструкция такой цепи образует систему компенсации электродинамических сил отталкивания, способную удерживать контакты замкнутыми при наличии тока короткого замыкания до тех пор, пока не будет осуществлено размыкание механизма 10 посредством размыкающего компонента 70.
Если обратиться к фиг. 3 и 4, то размыкающий храповой механизм 50 содержит пару фланцев 72, удерживающих ось 58 и ролик 64, установленный с возможностью свободного вращения. Порог разъединения тарируется посредством двух работающих на сжатие пружин 74, 76, расположенных между направляющей пластиной 78, прикрепленной к фланцам 72, и удерживающим рычагом 80, шарнирно установленным на оси 58. Конец удерживающего рычага 80 оснащен носиком 82, сконструированным таким образом, чтобы защелкиваться на захвате 60 в зацепленном положении храпового механизма 50.
Конец стопора 84 перемещения прикреплен к фланцам 72 и сконструирован таким образом, чтобы ограничить поворотное перемещение храпового механизма 50 в положение расцепления. Каждый фланец 72 содержит рабочий скос 86, расположенный вблизи от носика 82 удерживающего рычага 80, при этом наклон скоса 86 выбирается таким образом, чтобы осуществить самоотцепление захвата 60, когда превышен порог тарировки пружин 74, 76.
Работа механизма 10, оснащенного разъединяемым храповым механизмом 50 согласно изобретению, осуществляется следующим образом.
При замкнутой фазе механизма 10 опорная поверхность 66 разъединительного крюка 44 воздействует на ролик 64 с силой F и смещает размыкающий храповой механизм 50 для его поворота по часовой стрелке вокруг оси 53 до тех пор, пока носик 82 не защелкнется на захвате 60. После этого автоматический выключатель находится в устойчивом положении, в котором контакты 26, 30 замкнуты.
Автоматический выключатель обеспечивает высокую электродинамическую силу благодаря эффекту электродинамической компенсации, который создает тенденцию удержания контактов замкнутыми при наличии перегрузки по току. Такой эффект электродинамической компенсации является следствием U-образной конструкции электрической силовой цепи, при этом вторая шарнирная ось 42 пальцев подвижного контакта 28 преимущественно располагается на одной трети расстояния, разделяющего две соединительные подушки 34, 36 U-образной электрической цепи. Это приводит к появлению крутящего момента, который смещает контакты 28, 30 для их удержания в замкнутом положении несмотря на определенные противоположные силы.
Повышение контактного давления посредством электродинамического эффекта приводит к механической реакции, оказываемой на ось 42 клетки 26 и передаваемой к механизму 10 и, наконец, оказываемой на ролик 64 посредством расцепляющего крюка 44.
Такое увеличение силы F, действующей на ролик 64, зависит от интенсивности тока, текущего в электрической силовой цепи, причем оно обеспечивает тенденцию к повороту размыкающего храпового механизма 50 в направлении по часовой стрелке, когда сила F становится больше оттарированного порога для храповика 50, который определяется пружинами 74, 76.
В начале вращательного движения размыкающего храпового механизма носик 82 удерживающего рычага 80 остается в зацеплении с захватом 60, однако фланцы 72 храповика 50 начинают поворачиваться по часовой стрелке вокруг оси 58. При оттарированном усилии, соответствующем порогу самоотцепления захвата 60, скосы 86 фланцев 72 храпового механизма 50 взаимодействуют с полумесяцем захвата 60 и вызывают его вращение по часовой стрелке в направлении FI, с тем чтобы освободить удерживающий носик 80, что приводит к перемещению размыкающего храпового механизма в положение расцепления (фиг. 4). Ролик 64, будучи освобожденным, также освобождает расцепляющий крюк 44, который вызывает размыкание контактов 28, 30 посредством действующей на размыкание пружины 52, взаимосвязанной с переключающим устройством 14.
Размыкание механизма 10 посредством разъединительного действия храпового механизма 50 выполняется сверхбыстро и происходит перед работой разъединительного компонента 70, время срабатывания которого зависит от типа магнитотермического или электронного разъединительного устройства, используемого в автоматическом выключателе. Наличие размыкающего храпового механизма 50 с самоотцеплением захвата 60 обеспечивает возможность самозащиты автоматического выключателя сверхбыстрым способом, причем в то же время он остается совместимым с мгновенной защитой разъединительного устройства.
Сверхбыстрое саморасцепление механизма 10 происходит при весьма высоком уровне тока, превышающем пиковое значение в 180 кА. Размыкающий храповой механизм 50 согласно изобретению состоит из модульной подсборки, которая взаимозаменяема с обычным размыкающим храповым механизмом, например описанным в документе EP-A-222645.
Согласно варианту осуществления конструкции, показанному на фиг. 1 - 4, относительное движение между фланцами 72 и удерживающим рычагом 80 размыкающего храпового механизма 50 осуществляется посредством поворотного движения с небольшим угловым перемещением. Очевидно, что это относительное движение может быть получено поступательным перемещением посредством удлиненного отверстия.
Изобретение относится к рабочему механизму для многополюсного выключателя, содержащему переключающее устройство, связанное с расцепляющим крюком и коммутационным стержнем, и размыкающий храповой механизм, взаимодействующий с крюком для обеспечения нагружения или размыкания механизма соответственно в положении зацепления или расцепления храпового механизма. Размыкающий храповой механизм содержит разъединяемые приводные средства, вызывающие самоотцепление захвата при наличии тока короткого замыкания, превышающего оттарированный порог, определяемый гибкими средствами, при этом команда на упомянутое самоотцепление обеспечивается механической реакцией, создаваемой посредством эффекта электродинамической компенсации и приводящей к сверхбыстрому повороту захвата для расцепления размыкающего храпового механизма перерабатыванием размыкающего компонента. Технический результат - повышение электродинамической силы и отключающей способности и снижение размыкающего усилия и времени размыкания при коротком замыкании и большом токе. 6 з.п. ф-лы, 4 ил.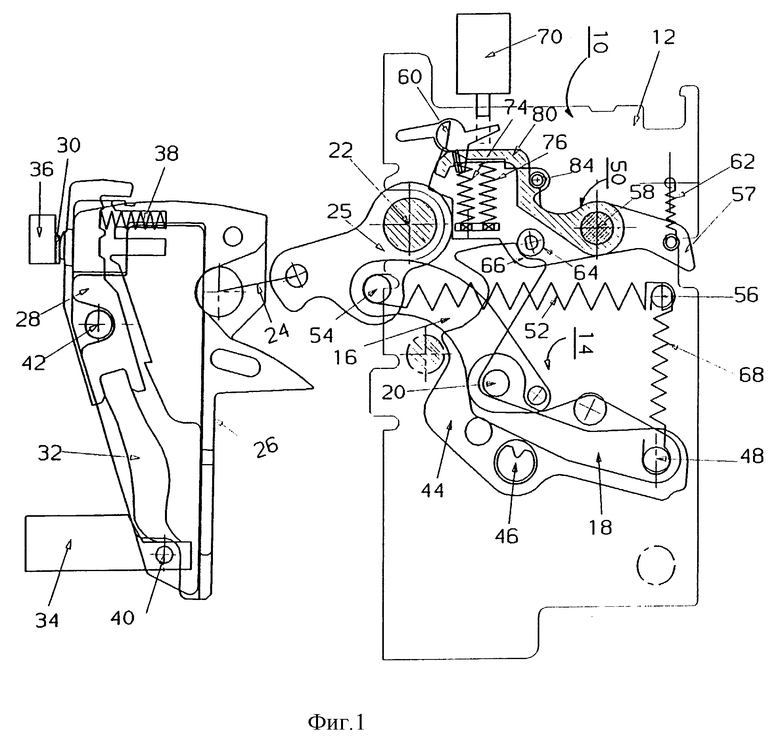
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| КОНВЕЙЕРНАЯ СУШИЛКА | 2003 |
|
RU2239755C2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ОПИСАНИЕ ИЗОБРЕТЕНИЯ | 0 |
|
SU388314A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| ШАХТА ДЛЯ АЭРОГАЗОДИНАМИЧЕСКОЙ УСТАНОВКИ | 1966 |
|
SU222645A1 |
