Настоящее изобретение относится к устройству управления электрическим коммутационным устройством, размещенному в изолирующем корпусе, содержащему, по меньшей мере, один подвижный контакт, поддерживаемый посредством контактной опоры, выполненный с возможностью приведения в соединение, по меньшей мере, с одним неподвижным контактом, который закреплен относительно корпуса, при этом упомянутый подвижный контакт может приводиться в движение либо вручную посредством ручки, закрепленной с возможностью вращения вокруг шарнирного пальца корпуса, либо автоматически между разомкнутым положением и замкнутым положением неподвижного и подвижного контактов, и устройство для быстрого замыкания, причем упомянутое устройство выполнено с возможностью удерживания подвижного контакта в разомкнутом положении, накапливая энергию в начале ручной операции замыкания ручки и на протяжении определенного перемещения последней, и освобождения подвижного контакта после данного перемещения ручки, так что ранее накопленная энергия обеспечивает быстрое замыкание неподвижного и подвижного контактов, причем устройство для быстрого замыкания содержит храповой механизм, закрепленный с возможностью вращения вокруг шарнирного пальца ручки, причем храповой механизм смещен посредством пружины к ограничителю ручки, приводится в движение посредством ручки в направлении замыкания неподвижного и подвижного контактов и приводится в соединение с контактной опорой таким образом, чтобы осуществить быстрое замыкание упомянутого подвижного контакта, изобретение относится также к электрическому коммутационному устройству, содержащему одно устройство управления электрическим коммутационным устройством.
Известен механизм управления миниатюрным размыкателем электрической цепи, раскрытый в документе FR 2616583 упомянутый механизм содержит ручку, соединенную со стержнем передачи для образования колено-рычажного механизма, устройство для опоры подвижного контакта, содержащее пластину, закрепленную с возможностью вращения на оси поворота, и механическую связь, способную разрываться под действием рычага расцепления. Соединение выполнено посредством стопорной защелки рычага расцепления, приводимой в соединение с фиксирующим крючком, закрепленным с возможностью поворота на шарнирном пальце пластины. Стержень соединен непосредственно с фиксирующим крючком, при этом узел образует ступень для понижения скорости, обеспечивающую уменьшение усилия расцепления. Механизм предпочтительно содержит устройство для быстрого замыкания контактов, содержащее блокировочный рычаг, расположенный на изолирующем опорном рычаге контактного рычага и приводимый в соединение с храповым механизмом, закрепленным с возможностью поворота на шарнирном пальце ручки. Данный храповой механизм соединен с оттяжной пружиной, которая смещает храповой механизм в направлении против часовой стрелки к ограничителю ручки. Устройство не содержит средства для индикации сваривания контактов.
В документе ЕР 342133 раскрыт механизм управления работой миниатюрного прерывателя электрической цепи с индикатором сваренных контактов. В данном механизме устройство для индикации сваривания контактов содержит ограничитель, расположенный на контактной опоре и выполненный с возможностью столкновения с блокировочным выступом, расположенным на основании ручки, таким образом, чтобы удерживать ручку в промежуточном положении в случае сваривания контактов. Данный механизм также содержит визуальный индикатор размыкания размыкателя цепи, расположенный на основании ручки рядом с соединением колено-рычажного механизма таким образом, чтобы он был виден с наружной стороны корпуса через отверстие, когда ручка достигает положения размыкания. Когда контакты свариваются, и оператор нажимает на ручку, оператор воздействует непосредственно на индикацию. Индикация может стать видимой, когда контакты свариваются. Это может вводить оператора в заблуждение и приводить к тому, что он оказывается в опасной ситуации.
Из документа FR 2660794 известен механизм миниатюрного размыкателя цепи, содержащий индикатор с двумя устойчивыми состояниями, закрепленный с возможностью свободного вращения на шарнирном пальце ручки между активный положением и неактивным положением. Индикатор содержит первый индикаторный рычаг, оснащенный индикатором, и второй приводной рычаг, способный перемещаться между двумя ограничителями конца перемещения и содержащий кромку, взаимодействующую с выступом контактной опоры для фиксации индикатора в неактивном положении, когда ручка приводится в движение из замкнутого положения в разомкнутое положение в случае сваривания контактов.
Настоящее изобретение направлено на решение упомянутых выше проблем. Задачей настоящего изобретения является создание устройства управления электрическим коммутационным устройством, которое содержит устройство для индикации сваривания контактов, имеющее простую конструкцию, содержащую небольшое количество деталей, и в котором приведение в действие ручки, когда контакты свариваются, не перемещает индикатор ошибочно в разомкнутое положение контактов.
Данное устройство характеризуется тем, что храповой механизм содержит индикатор, причем индикатор является видимым с наружной стороны через отверстие корпуса, только когда неподвижный и подвижный контакты разомкнуты.
В соответствии с конкретным вариантом осуществления изобретения храповой механизм сформован совместно с индикатором.
Предпочтительно данный храповой механизм содержит наружную поверхность, называемую первой поверхностью, в виде части цилиндра, приводимую в соединение с наклонной плоскостью, являющейся частью контактной опоры, так что последняя удерживается в разомкнутом положении контактов во время замыкания ручки в течение определенного периода времени, соответствующего времени, в течение которого храповой механизм скользит вдоль наклонной плоскости контактной опоры.
Предпочтительно на одном из концов своей наружной поверхности, называемой первой поверхностью, храповой механизм содержит участок поверхности, называемый второй поверхностью, проходящий по существу перпендикулярно первой поверхности и выполненный с возможностью приведения в соединение с деталью, образующей выступ в конце наклонной плоскости контактной опоры, чтобы удерживать храповой механизм в положении, в котором индикатор является невидимым с наружной стороны, когда ручка приводится в движение в разомкнутое положение контактов, когда контакты свариваются.
Предпочтительно индикатор выполнен из полоски материала, продолжающейся из вышеупомянутого участка поверхности, называемого второй поверхностью.
Предпочтительно основание ручки содержит наружную поверхность также в виде части цилиндра, причем основание содержит также выемку в материале, наружная форма которой повторяет форму внутренней поверхности полоски материала, образующей индикатор и направленной к шарнирному пальцу ручки, так что в разомкнутом положении контактов последние две поверхности перекрываются, при этом полоска материала, образующая индикатор, содержит наружную поверхность, расположенную на продолжении наружной поверхности основания.
Предпочтительно устройство управления содержит стержень передачи, соединенный с ручкой, устройство для опоры подвижного контакта, содержащее пластину, закрепленную с возможностью вращения на оси поворота и имеющую разрывающуюся механическую связь со стержнем передачи, рычаг расцепления, управляемый расцепляющим устройством для обеспечения разрывания механической связи в случае неисправности, обеспечивая автоматическое расцепление механизма, независимо от ручки и разделения контактов, причем разрываемая механическая связь содержит стопорную защелку рычага расцепления, приводимую в соединение с фиксирующим крючком, закрепленным с возможностью поворота на шарнирном пальце пластины, при этом разрывание механической связи соответствует освобождению фиксирующего крючка, причем устройство характеризуется тем, что оно также содержит ограничитель, прочно соединенный с пластиной и выполненный с возможностью приведения в соединение с фиксирующим крючком, таким образом, чтобы гарантировать положение ручки в ее промежуточном положении, в котором контакты свариваются.
Другой задачей изобретения является создание электрического коммутационного устройства, содержащего устройство управления, содержащего вышеупомянутые признаки, взятые отдельно или в комбинации.
Другие преимущества и признаки изобретения станут более очевидными из приведенного ниже подробного описания со ссылками на прилагаемые чертежи, данные только для примера, на которых:
Фиг.1 изображает общий вид внутренней части коммутационного устройства, содержащего устройство управления в разомкнутом положении контактов согласно изобретению.
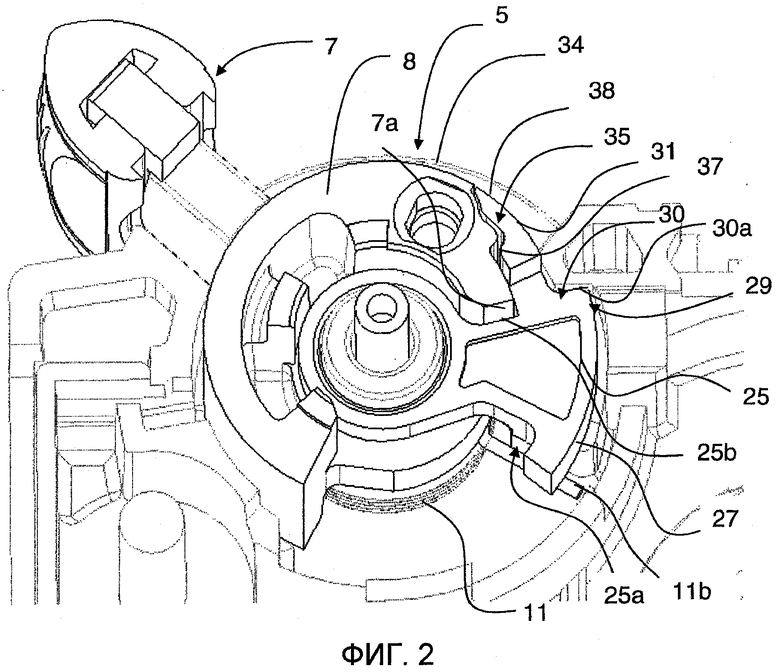
Фиг.2 - частичный общий вид, иллюстрирующий ручку в данном положении контактов коммутационного устройства согласно изобретению.
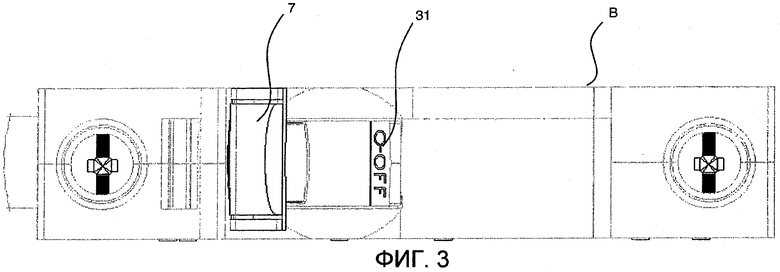
Фиг.3 - вид сверху коммутационного устройства в том же самом положении контактов согласно изобретению.
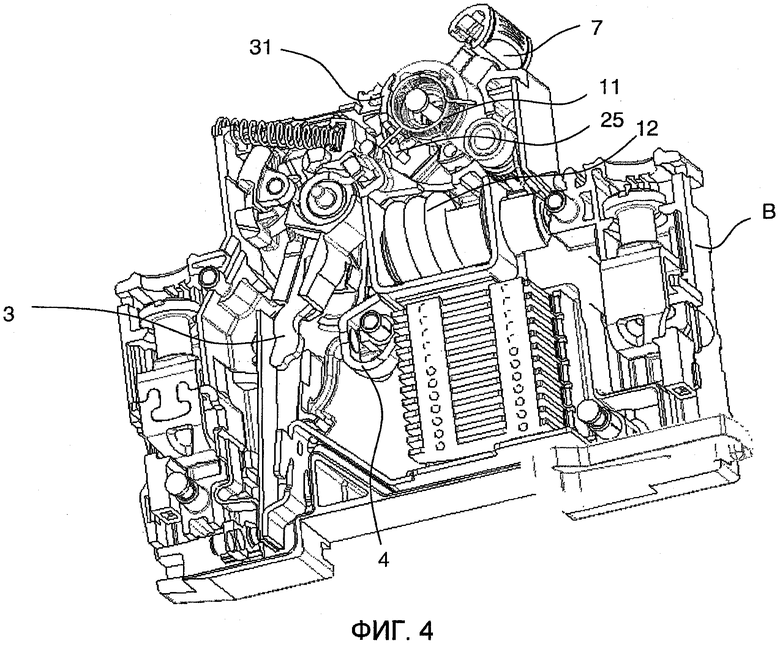
Фиг.4 - общий вид задней части коммутационного устройства в том же самом положении согласно изобретению.
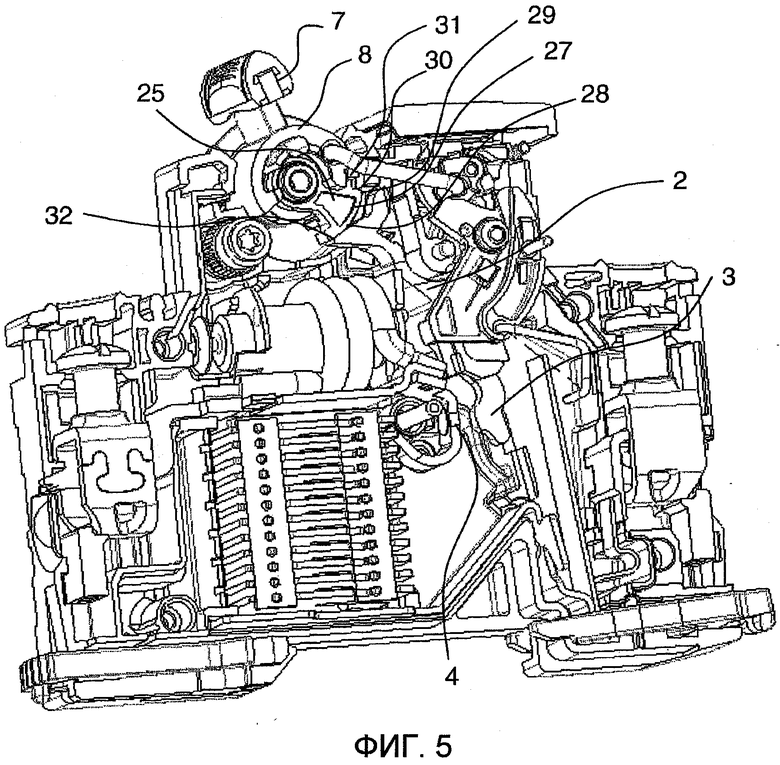
Фиг.5 - общий вид внутренней части коммутационного устройства в положении, соответствующем началу замыкания коммутационного устройства, согласно изобретению.
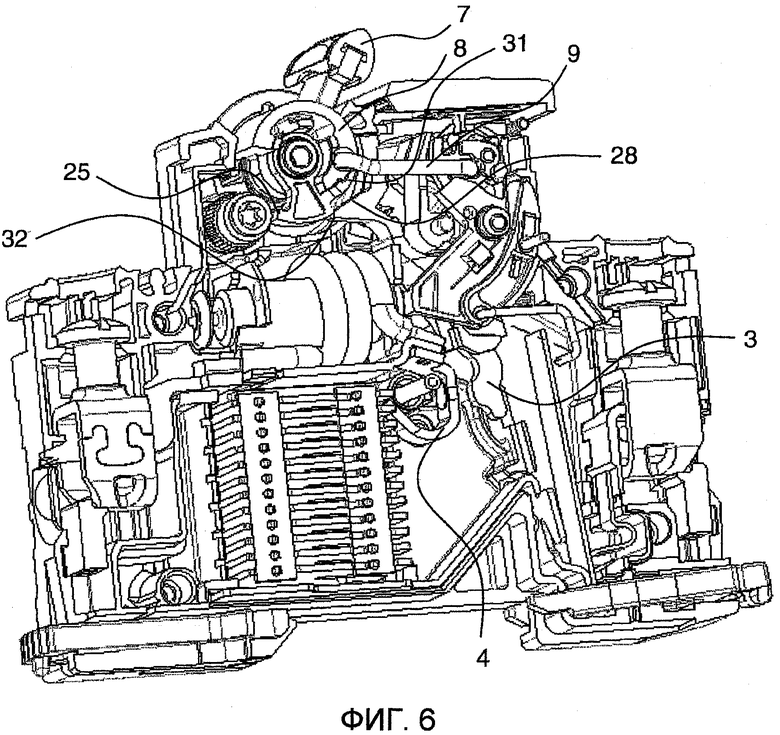
Фиг.6 - то же, что на фиг.5, в положении устройства, соответствующем быстрому замыканию коммутационного устройства, согласно изобретению.
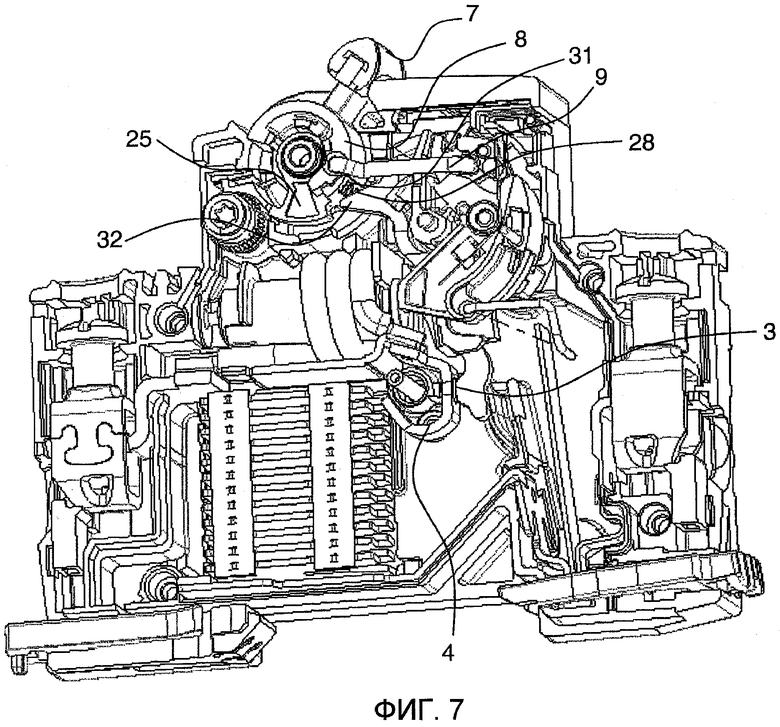
Фиг.7 - то же, что на фиг.5 и 6 в положении, когда коммутационное устройство находится в замкнутом положении, согласно изобретению.
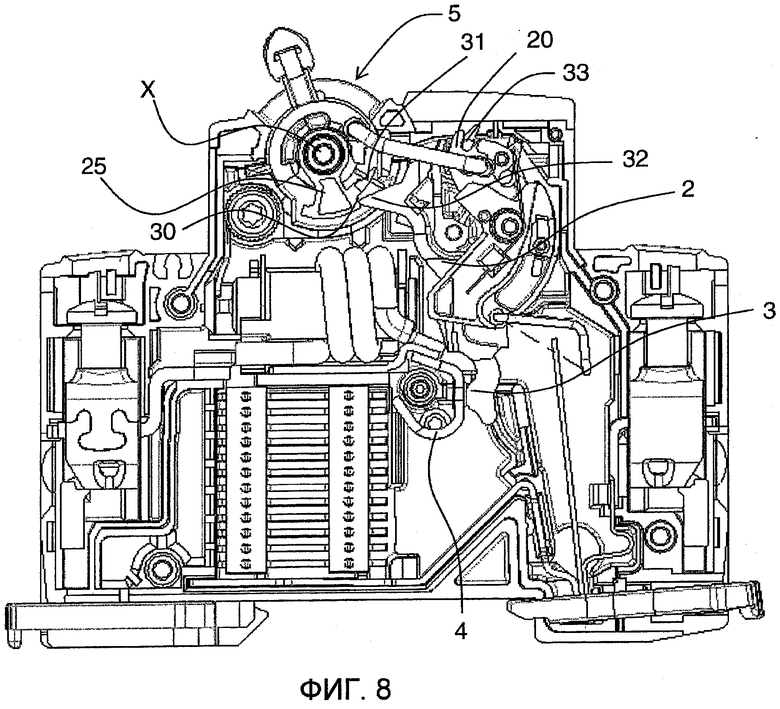
Фиг.8 - вид сверху, иллюстрирующий внутреннюю часть коммутационного устройства в положении, в котором контакты свариваются, согласно изобретению;
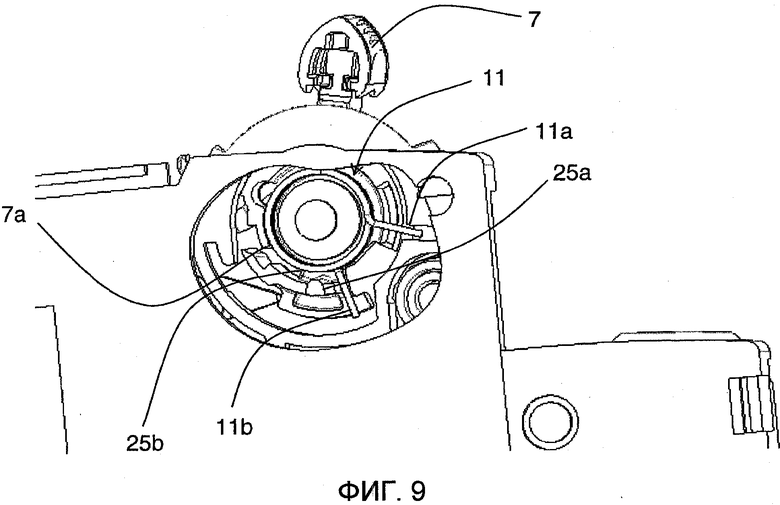
Фиг.9 - общий вид в разрезе, более подробно иллюстрирующий ручку в сваренном положении контактов, согласно изобретению;
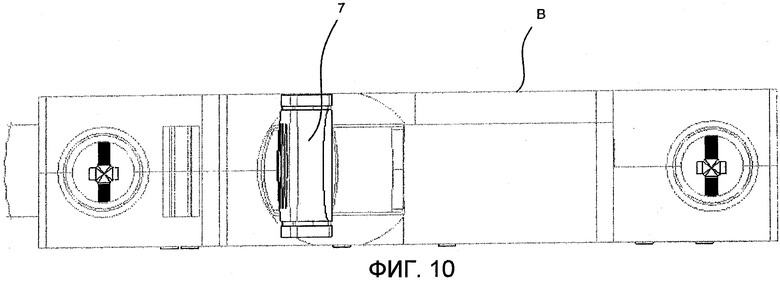
Фиг.10 - вид сверху коммутационного устройства в сваренном положении контактов, после приложения усилия к ручке, согласно изобретению.
На фиг.1 и 4-8 показан миниатюрный размыкатель электрической цепи с формованным изолирующим корпусом В, содержащим устройство 1 управления в соответствии с изобретением. Устройство 1 управления приводит в движение контактную опору 2, содержащую контактный элемент 3, приводимый в соединение с неподвижным контактом 4. Отверстие 5 выполнено в передней панели 6 корпуса для прохождения ручки 7, закрепленной с возможностью ограниченного поворота на шарнирном пальце Х между замкнутым положением, в котором контакты 3, 4 замыкаются, и разомкнутым положением, соответствующим разделению контактов 3, 4. Ручка 7 снабжена внутренним основанием 8, соединенным со стержнем 9 передачи для образования колено-рычажного устройства, причем шарнирное соединение 10 данного колено-рычажного устройства является эксцентричным по отношению к оси шарнирного пальца Х ручки 7.
Ручка 7 смещена в направлении, соответствующем размыканию контактов посредством оттяжной пружины 11 (фиг.2). Неподвижный контакт прочно прикреплен к центральной части корпуса электромагнитного расцепляющего устройства 12. Контактная опора 2, выполненная из изолирующего материала, поворачивается вокруг оси 14 поворота, являющейся частью вращающейся пластины 15, приводящей в движение контактную опору 2. Рычаг 16 расцепления, приводимый в движение ударником 17 электромагнитного расцепляющего устройства, и биметаллическая полоска 18 теплового расцепляющего устройства закреплены с возможностью поворота на шарнирном пальце Y, поддерживаемом пластиной 15 с заданным смещением относительно вышеупомянутой оси 14 поворота.
Разрываемая механическая связь находится между стержнем 9 передачи и приводной пластиной 15 контактной опоры 2. В фиксированном положении данная связь обеспечивает ручное управление механизмом посредством ручки 7. Перемещение рычага 16 расцепления в расцепленное положение под действием расцепляющего устройства вызывает моментальный разрыв механической связи, обеспечивая автоматическое расцепление механизма независимо от ручки. Рычаг 16 расцепления соединен с оттяжной пружиной 19, выполненной с возможностью осуществления автоматического восстановления механической связи, когда ручка 7 приводится в движение в разомкнутое положение после размыкания механизма при неисправности.
Разрываемая механическая связь содержит фиксирующий крючок 20, закрепленный с возможностью поворота на шарнирном пальце Z пластины 15. Напротив шарнирного пальца Z выступ 21 фиксирующего крючка (на чертежах не показан) приводится при фиксированном положении связи в соединение со стопорной защелкой 22 (на чертежах не видна), расположенной на плече рычага 16 расцепления. Стержень 9 передачи соединен с фиксирующим крючком 20 и пластиной 15 в точке сочленения, то есть должен перемещаться в двух, следующих друг за другом отверстиях 23,24 пластины 15, когда происходит расцепление. Данная точка сочленения расположена между шарнирным пальцем Z, шарнирно соединяющим фиксирующий крючок 20 на пластине 15, и выступом 21 фиксирующего крючка.
Необходимо также отметить, что устройство содержит также ограничитель 33 (фиг.8), прочно прикрепленный к пластине 15 и выполненный с возможностью приведения в соединение с фиксирующим крючком 20, таким образом, чтобы гарантировать положение ручки 7 в промежуточном положении ручки 7, в котором контакты 3,4 свариваются.
Устройство 1 управления также содержит храповой механизм 25, закрепленный с возможностью вращения вокруг шарнирного пальца Х ручки 7 и смещенный посредством пружины 11 в направлении против часовой стрелки к ограничителю 7а основания 8 ручки 7 (фиг.2).
Как показано на фиг.9, пружина 11 содержит первое звено 11а, закрепленное в корпусе 26, и второе звено 11b, нажимающее на ограничитель 25а храпового механизма и также выполненное с возможностью смещения ручки в разомкнутое положение посредством нажатия на ограничитель 7а ручки и на ограничитель 25b храпового механизма (фиг.2).
Храповой механизм 25 имеет наружную поверхность 27, называемую первой поверхностью, в виде части цилиндра, выполненную с возможностью приведения в соединение с наклонной плоскостью 28, расположенной в конце контактной опоры 2, так что контактная опора 2 удерживается в открытом положении контактов во время замыкания ручки 7 в течение определенного периода времени, соответствующего времени, в течение которого храповой механизм 25 скользит вдоль наклонной плоскости 28 контактной опоры 2.
В конце 29 наружной поверхности 27, имеющий вид части цилиндра, храповой механизм 25 содержит участок поверхности 30, называемый вторым участком поверхности, проходящий по существу перпендикулярно участку поверхности 27, называемому первым участком поверхности, и из которого проходит полоска материала, образующая индикатор 31. Данный участок поверхности 30, называемый вторым участком поверхности, содержит элемент 30а (фиг.2), выполненный с возможностью приведения в соединение с элементом, образующим выступ 32, выполненный в конце наклонной плоскости 28 контактной опоры 2, таки образом, чтобы удерживать храповой механизм около его оттяжной пружины 11 в положении, в котором индикатор 31 не виден снаружи, когда ручка приводится в движение из замкнутого положения контактов в разомкнутое положение контактов, когда контакты свариваются.
Как показано на фиг.2, основание 8 ручки 7 содержит наружную поверхность 34 также в виде части цилиндра, и данное основание содержит выемку 35 в материале, наружная форма которой повторяет форму внутренней поверхности 37 полоски материала 31, образующей индикатор, так что при разомкнутом положении контактов последние две поверхности перекрываются, при этом полоска материала 31, образующая индикатор, содержит наружную поверхность 38, расположенную на продолжении наружной поверхности 34 вышеупомянутого основания 8.
Ниже описана работа устройства управления в соответствии с изобретением со ссылками на чертежи.
На фиг.1-4 контакты 3, 4 коммутационного устройства разомкнуты. Оттяжная пружина 11 ручки смещает храповой механизм 25 и связанный с ним индикатор 31 к основанию 8 ручки 7, при этом узел, образованный ручкой 7 и храповым механизмом 25, смещается в разомкнутое положение посредством пружины 11. В данном положении ручка 7 расположена в левой части коммутационного устройства, а индикатор 31 виден через отверстие 5 корпуса.
На фиг.5 ручка 7 начинает перемещаться рукой в замкнутое положение при перемещении слева направо.
В начале перемещения для замыкания кинематическая система связи ручки 7 с пластиной 15 приводит в движение контактную опору 2 по направлению к неподвижному контакту 4. В процессе перемещения ручка 7 приводит в движение храповой механизм 25 в своем перемещении, когда индикатор 31 нажимает на основание 8 ручки 7 в разомкнутом положении. Храповой механизм 25 вращается при помощи ручки 7 и перемещается ближе к контактной опоре, которая вращается в противоположном направлении. Взаимодействие храпового механизма 25 с наклонной плоскостью 28 прекращает вращение контактной опоры и удерживает контактную часть 3 контактной опоры 2 на заданном расстоянии от неподвижного контакта 4. При этом контактная опора 2 остается неподвижной, а храповой механизм 25, тем не менее, может скользить вдоль наклонной плоскости 28, обеспечивая перемещение для замыкания ручки 7. Во время перемещения ручки 7 последняя продолжает приводить в движение механизм, который растягивает контактную нажимную пружину. Это обеспечивает накапливание энергии в контактной нажимной пружине до конца скользящего перемещения храпового механизма по наклонной плоскости, в положение, изображенное на фиг.6.
Конечное перемещение ручки 7 в замкнутое положение (фиг.7), обеспечивает освобождение контактной опоры 2 посредством храпового механизма 25 с последующим быстрым замыканием контактной опоры 2 благодаря действию кинематической системы и, в частности, контактной нажимной пружины. Во время перемещения ручки 7 из разомкнутого положения (фиг.1) в замкнутое положение (фиг.7), индикатор 31 перемещается из положения, в котором он является видимым снаружи, в отведенное положение внутри коммутационного устройства.
При осуществлении ручного размыкания размыкателя цепи (фиг.8), храповой механизм сталкивается с ограничителем, образованным посредством выступа 32 контактной опоры, не препятствуя свободному повороту пластины и контактной опоры. При этом храповой механизм остается на месте, а ручка и ее механизм продолжают свое вращение. Когда расстояние размыкания между контактами 3 и 4 становится больше 1,5 мм, храповой механизм освобождается от ограничителя 32 и принудительно прижимается к поверхности 7а основания 8 ручки под действием оттяжной пружины 11, пока не будет достигнуто разомкнутое положение ручки (фиг.5) и индикатор 31 станет виден через отверстие 5 корпуса (фиг.1).
Когда контакты свариваются и требуется перемещение из замкнутого положения (фиг.7) в разомкнутое положение (фиг.1), ручка 7 может переместиться до определенной точки, но не приводит в движение пластину, поскольку контакты свариваются. Во время данного перемещения храповой механизм 25 поджимается к ручке в направлении по часовой стрелке посредством оттяжной пружины 11. Когда происходит перемещение храпового механизма 25, последний входит в контакт с выступом 32 контактной опоры посредством его поверхности, называемой второй поверхностью, образующей наклонную плоскость 30, и удерживается посредством данной контактной опоры в промежуточном положении, в котором индикатор 31 отведен внутрь устройства (фиг.8). Когда к ручке 7 прикладывается усилие для перемещения последней в разомкнутое положение, индикатор 31 остается в промежуточном положении до тех пор, пока контакты свариваются.
Таким образом, в соответствии с изобретением индикатор 31 поддерживается храповым механизмом 25, который предназначен для быстрого замыкания. Храповой механизм блокируется в промежуточном положении посредством контактной опоры 2, когда контакты свариваются. Таким образом, кинематическая система индикатора не зависит от внешних воздействий на ручку.
Настоящее изобретение может быть использовано в любом электрическом коммутационном устройстве, таком как размыкатель цепи, переключатель или размыкающий переключатель и др., контакты которого могут приводиться в движение посредством ручки или подобного средства, и содержащем устройство для быстрого замыкания, причем устройство для быстрого замыкания содержит храповой механизм, закрепленный с возможностью вращения вокруг шарнирного пальца ручки.
Таким образом, предложено устройство управления в соответствии с изобретением, в котором кинематическая система индикатора не зависит от воздействий оператора на ручку без необходимости использования дополнительных элементов. Какое бы усилие не прикладывалось к ручке, индикатор становится видимым только тогда, когда контакты свариваются.
Настоящее изобретение, конечно, не ограничено описанными и проиллюстрированными вариантами осуществления, которые представлены только в качестве примера.
Напротив, настоящее изобретение распространяется на все технические эквиваленты описанных средств, а также их комбинации, если последние выполнены в соответствии с сущностью изобретения.
Изобретение относится к электротехнике, к устройству управления электрическим коммутационным устройством. Технический результат состоит в упрощении конструкции путем уменьшения количества деталей. Устройство управления электрическим коммутационным устройством расположено в изолирующем корпусе и содержит, по меньшей мере, один подвижный контакт (3), поддерживаемый контактной опорой (2), выполненный с возможностью приведения в соединение, по меньшей мере, с одним неподвижным контактом (4), который закреплен относительно корпуса. Подвижный контакт приводится в движение либо вручную посредством ручки (7), либо автоматически. Устройство для быстрого замыкания содержит храповой механизм (25), закрепленный с возможностью вращения вокруг шарнирного пальца Х ручки (7). Храповой механизм (25) смещен посредством пружины к ограничителю ручки (7), приводится в движение посредством ручки (7) в направлении замыкания неподвижного и подвижного контактов до соединения с контактной опорой таким образом, чтобы осуществлять быстрое замыкание подвижного контакта. Храповой механизм (25) содержит индикатор (31), который виден снаружи через отверстие (5) корпуса только когда неподвижный (3) и подвижный (4) контакты разомкнуты. 2 н. и 6 з.п. ф-лы, 10 ил.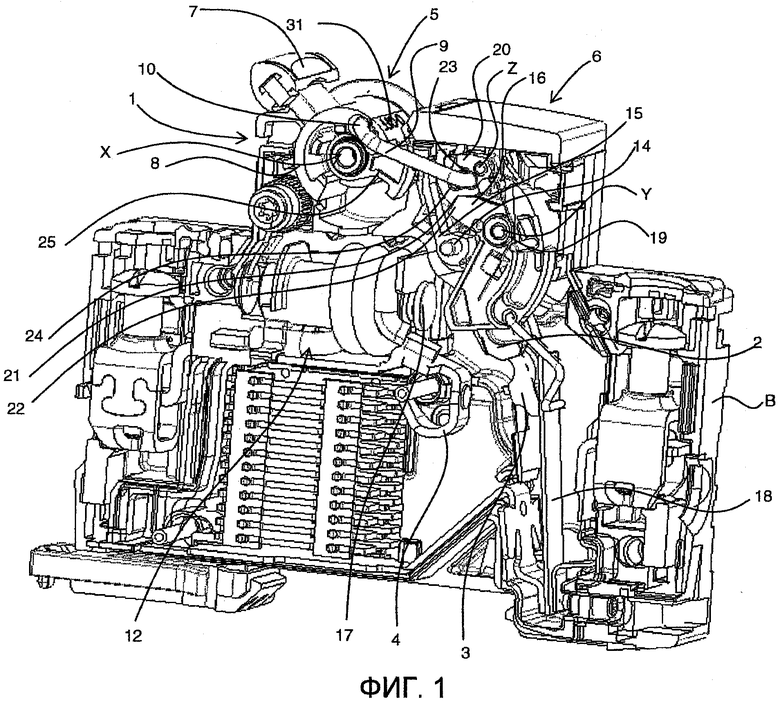
1. Устройство управления электрическим коммутационным устройством, расположенное в изолирующем корпусе, содержащее, по меньшей мере, один подвижный контакт, поддерживаемый посредством контактной опоры, выполненный с возможностью приведения в соединение, по меньшей мере, с одним неподвижным контактом, который закреплен относительно корпуса, при этом подвижный контакт может приводиться в движение либо вручную посредством ручки, закрепленной с возможностью вращения вокруг шарнирного пальца корпуса, либо автоматически между разомкнутым положением и замкнутым положением неподвижного и подвижного контактов, и устройство для быстрого замыкания, которое выполнено с возможностью удерживания подвижного контакта в разомкнутом положении, накапливая энергию в начале ручной операции замыкания ручки и на протяжении определенного перемещения последней, и освобождения подвижного контакта после данного перемещения ручки, так что ранее накопленная энергия обеспечивает быстрое замыкание неподвижного и подвижного контактов, при этом устройство для быстрого замыкания содержит храповой механизм, закрепленный с возможностью вращения вокруг шарнирного пальца ручки, причем храповой механизм смещен посредством пружины к ограничителю ручки, приводится в движение посредством ручки в направлении замыкания неподвижного и подвижного контактов и приводится в соединение с контактной опорой таким образом, чтобы осуществить быстрое замыкание подвижного контакта, отличающееся тем, что храповой механизм (25) содержит индикатор (31), причем индикатор (31) виден снаружи через отверстие (5) корпуса только когда неподвижный (3) и подвижный (4) контакты разомкнуты.
2. Устройство управления по п.1, отличающееся тем, что храповой механизм (25) сформован совместно с индикатором (31).
3. Устройство управления по п.1 или 2, отличающееся тем, что храповой механизм (25) содержит наружную поверхность (27), называемую первой поверхностью, в виде части цилиндра, приводимую в соединение с наклонной плоскостью (28), являющейся частью контактной опоры (2), так что последняя удерживается в разомкнутом положении контактов (3, 4) во время замыкания ручки (7) в течение определенного периода времени, соответствующего времени, в течение которого храповой механизм (25) скользит вдоль наклонной плоскости (28) контактной опоры (2).
4. Устройство управления по п.3, отличающееся тем, что в конце (29) своей наружной поверхности (27), называемой первой поверхностью, храповой механизм (25) содержит участок поверхности (30), называемый второй поверхностью, проходящий, по существу, перпендикулярно первой поверхности и выполненный с возможностью приведения в соединение с элементом, образующим выступ (32) в конце наклонной плоскости (28) контактной опоры (2), чтобы удерживать храповой механизм (25) в положении, в котором индикатор (31) невидим снаружи, когда ручка (7) приводится в движение в разомкнутое положение контактов, когда контакты свариваются.
5. Устройство управления по п.4, отличающееся тем, что индикатор (31) образован посредством полоски материала, проходящей из вышеупомянутого участка поверхности, называемого второй поверхностью (30).
6. Устройство управления по п.5, отличающееся тем, что основание (8) ручки (7) содержит наружную поверхность (34) также в виде части цилиндра, при этом основание содержит выемку (35) в материале, наружная форма которой повторяет форму внутренней поверхности (37), направленной к шарнирному пальцу ручки (7), полоски материала (31), образующей индикатор, так что в разомкнутом положении контактов последние две поверхности перекрываются, причем полоска материала (31), образующая индикатор, содержит наружную поверхность (38), расположенную на продолжении наружной поверхности (34) основания (8).
7. Устройство управления по п.1, содержащее стержень (9) передачи, соединенный с ручкой (7), устройство для опоры подвижной опоры, содержащее пластину (15), закрепленную с возможностью вращения на оси (14) поворота и содержащую разрывную механическую связь со стержнем (9) передачи, рычаг (16) расцепления, управляемый посредством устройства расцепления для обеспечения разрыва механической связи в случае неисправности, обеспечивающий автоматическое расцепление механизма независимо от ручки и разделения контактов, при этом разрывная механическая связь содержит стопорную защелку (22) рычага (16) расцепления, приводимую в соединение с фиксирующим крючком (20), закрепленным с возможностью поворота на шарнирном пальце Х пластины, причем разрыв механической связи соответствует освобождению фиксирующего крючка, отличающееся тем, что оно содержит ограничитель (33), прочно соединенный с пластиной (15) и выполненный с возможностью приведения в соединение с фиксирующим крючком (20), чтобы гарантировать положение ручки (7) в промежуточном положении ручки (7), в котором контакты свариваются.
8. Электрическое коммутационное устройство, содержащее устройство управления по любому из пп.1-7.
| ЕР 452230 А, 16.10.1991 | |||
| ЭЛЕКТРИЧЕСКОЕ УСТРОЙСТВО ОТКЛЮЧЕНИЯ С ПОЛНЫМ РАЗЛИЧЕНИЕМ СОСТОЯНИЯ | 2004 |
|
RU2310943C2 |
| ЕР 1542253 А, 15.07.2005 | |||
| Кормораздатчик | 1980 |
|
SU897186A1 |
| СПОСОБ ПРОВЕДЕНИЯ ТОМОСИНТЕЗА ОРГАНОВ ГРУДНОЙ ПОЛОСТИ | 2016 |
|
RU2616583C1 |
| АНЕМОРУМБОМЕТР | 0 |
|
SU342133A1 |

