Изобретение относится к трубопроводному транспорту, в основном к арматуре магистральных газопроводов с предпочтительными диаметрами проходных сечений Dy = 100 мм и выше. Изобретение также может найти применение в различных областях техники, например - в системах автоматизации, где используются ротационные, многооборотные двигатели и приводы.
Широко известны различные типы арматуры газопроводов с ручными многооборотными приводами, включающими маховик или штурвал и механическую передачу, преобразующую крутящий момент, передаваемый от маховика к запорному узлу арматуры (Гуревич Д.Ф., Заринский О.Н., Кузьмин Ю.К. Справочник по арматуре для газо- и нефтепроводов. Л.: Недра, 1988, с. 463) /1/. В качестве механической передачи могут быть применены винтовые пары, шестеренчатые, червячные редукторы, кулисные или рычажные механизмы, приводимые от маховика. Сам маховик является многооборотным, то есть - ротационным устройством. Благодаря наличию механической передачи с относительно высокими передаточными числами до 200 - 1000 - эти конструкции достаточно просты, компактны, надежны и имеют усилия на маховике или рукоятке штурвала ручного привода, не превышающие 150. ..250 Нм (15...25 кг). Соответственно этими силами образуются и моменты сил, зависящие от радиуса в месте их приложения, то есть радиуса штурвала или маховика. При разумном диаметре маховика, определяемом исходя из условий эргономики и габаритов арматуры и соответствующем примерно D = 100...1000 мм в зависимости от диаметра проходного сечения арматуры, момент, создаваемый штурвалом - ручным приводом крана, должен быть равен M = 15...250 Нм.
Однако данные конструкции ручных многооборотных приводов не имеют систем автоматизации или механизации процесса перестановки арматуры, то есть не обеспечивают, например - дистанционного управления арматурой, а сама операция перестановки крана вручную является достаточно длительной и, поэтому - трудоемкой.
Также известны автоматизированные приводы управления арматурой, включающие механическую передачу и пневматический двигатель, (см. например, устройство из работы /1/. На фиг. 4.13 - общий вид крана МА 39003 с Dy = 300 мм с пневмогидроприводом для наземной установки). Арматура включает кран, пневматический двигатель, гидравлический двигатель, механическую передачу - кулисный механизм и устройство ручного, местного управления - гидравлический насос с рукояткой. В этой арматуре обязательно устанавливается устройство ручного управления, например, для перестановки крана в аварийных ситуациях, при отсутствии давления газа или при отказе системы управления и пневматического двигателя. В пневмогидропривод входит пневматический поршневой двигатель, необходимый для автоматической перестановки крана и гидравлический поршневой двигатель - для выполнения ручной перестановки крана.
Недостатком такой арматуры является относительная сложность и низкая надежность устройства ручного управления, состоящего из дополнительного гидродвигателя или гидроцилиндра, емкости с жидкостью, ручного насоса с поршневой парой высокой точности, системы клапанов и трубопроводов. Само наличие дополнительного рабочего тела (кроме газа) - специальной жидкости существенно усложняет эксплуатацию всего устройства. Например - возможны утечки жидкости, что ведет к загрязнению пространства вокруг крана и окружающей среды. Одновременно требуется периодическое пополнение жидкости в емкости, а специальная жидкость имеет высокую стоимость.
Известна арматура турбопровода, содержащая корпус, запорный орган, управляемый приводом с пневматическим ротационно-роликовым двигателем, снабженным силовым элементом в виде гибкой ленты и роликами, и маховиком ручного управления, расположенным на одном валу с ротором двигателя (SU 1555584 A1, F 16 K 31/05, 31/14, 07.04.1990 г.).
Двигатель известного устройства имеет геометрические размеры, обеспечивающие моментные характеристики, примерно соответствующие моментным характеристикам на маховике устройства ручного управления. Таким образом известный двигатель подобран так, чтобы момент сил на валу совпал с моментом сил, создаваемых человеком при вращении штурвала, и тем самым используется механическая передача устройства ручного управления - многооборотная, чисто механическая передача с маховиком.
Указанное известное устройство принято в качестве прототипа как наиболее близкий по технической сущности и достигаемому результату аналог.
Недостатком прототипа является сложность технического обслуживания и малый диапазон приводов управления арматурой.
Изобретение направлено на упрощение технического обслуживания и расширения диапазона приводов управления арматурой.
Технический результат изобретения достигается тем, что в известной арматуре трубопровода, содержащей корпус, запорный орган, управляемый с пневматическим ротационно-роликовым двигателем, снабженным силовым элементом в виде гибкой ленты и, по меньшей мере, одним роликом, и маховиком ручного управления, расположенным на одном валу с ротором двигателя, ротационно-роликовый двигатель выполнен в виде набора установленных на одном валу кольцевых камер, одни из которых выполнены с возможностью придания вращения ротору в одном направлении, а другие - в обратном, причем в каждой камере расположены гибкая лента и один ролик, при этом кольцевые камеры, вращающие ротор в одном направлении, развернуты относительно кольцевых камер, вращающих ротор в обратном направлении. Кроме этого, кольцевые камеры, вращающие ротор в одном направлении, развернуты на 180o относительно кольцевых камер, вращающих ротор в обратном направлении. При этом кольцевые камеры, вращающие ротор в одном направлении, и кольцевые камеры, вращающие ротор в обратном направлении, установлены поочередно, через одну.
Ротационно-роликовый двигатель встроен в цепь механической передачи арматуры. Таким образом осуществляется автоматизация арматуры трубопровода.
Это достигается тем, что размеры рабочих кольцевых камер и плечо ротора пневматического двигателя позволяют создавать высокие моментные характеристики порядка 50...500 Нм. Из всех ранее известных двигателей вращения - ротационных, турбинных, шестеренных (см. например, Зеленский С.Б., Рябков Е.Д. , Микеров А. Г. Ротационные пневматические двигатели. Л.: Машиностроение, 1976, с. 240) предлагаемый двигатель в виде набора установленных на одном валу рабочих кольцевых камер является наиболее высокомоментным при одинаковых геометрических размерах и параметрах рабочего газа. Тем самым удается полностью исключить или значительно уменьшить размеры дополнительного редуктора в цепи механической передачи привода.
Благодаря приемлемым геометрическим размерам двигателя в целом и его рабочих пневматических камер, а также при наиболее распространенных давлениях рабочего газа порядка 0,04...0,8 МПа, подаваемого в каждую камеру двигателя, можно получить момент сил на выходном валу двигателя, примерно равном моменту сил, создаваемому оператором при вращении штурвала. Поэтому двигатель такого типа устанавливается на одном валу с ручным приводом-дублером и при этом использует его механическую, например винтовую или зубчатую передачу для поворота шара или перемещения пробки крана - арматуры.
Привод может использоваться как в качестве дополнительного аварийного, так и в качестве основного управляющего арматурой. В первом случае привод находится в режиме ожидания и "срабатывает" только на закрытие (или открытие) арматуры в экстренных ситуациях, по специальному сигналу. Во втором случае привод должен обеспечить управление арматурой как при ее открытии, так и при закрытии. С этой целью часть двигателей и рабочих камер привода работают на открытие арматуры, а часть - на закрытие. При этом отдельные двигатели размещаются в одном "пакете", на одном валу.
Для обеспечения балансировки и выравнивания сил, обеспечивающих вращение привода, камеры двигателя, вращающие ротор в одном направлении - по часовой стрелке, и камеры, вращающие ротор в противоположном направлении - против часовой стрелки, развернуты на 180o относительно друг друга и установлены поочередно, через одну.
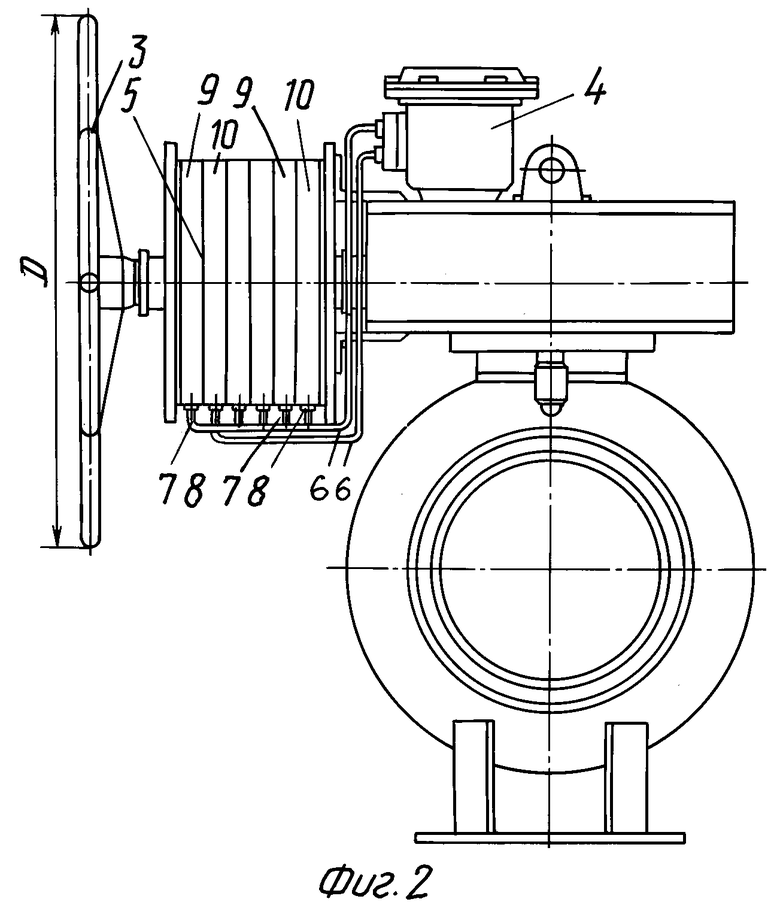
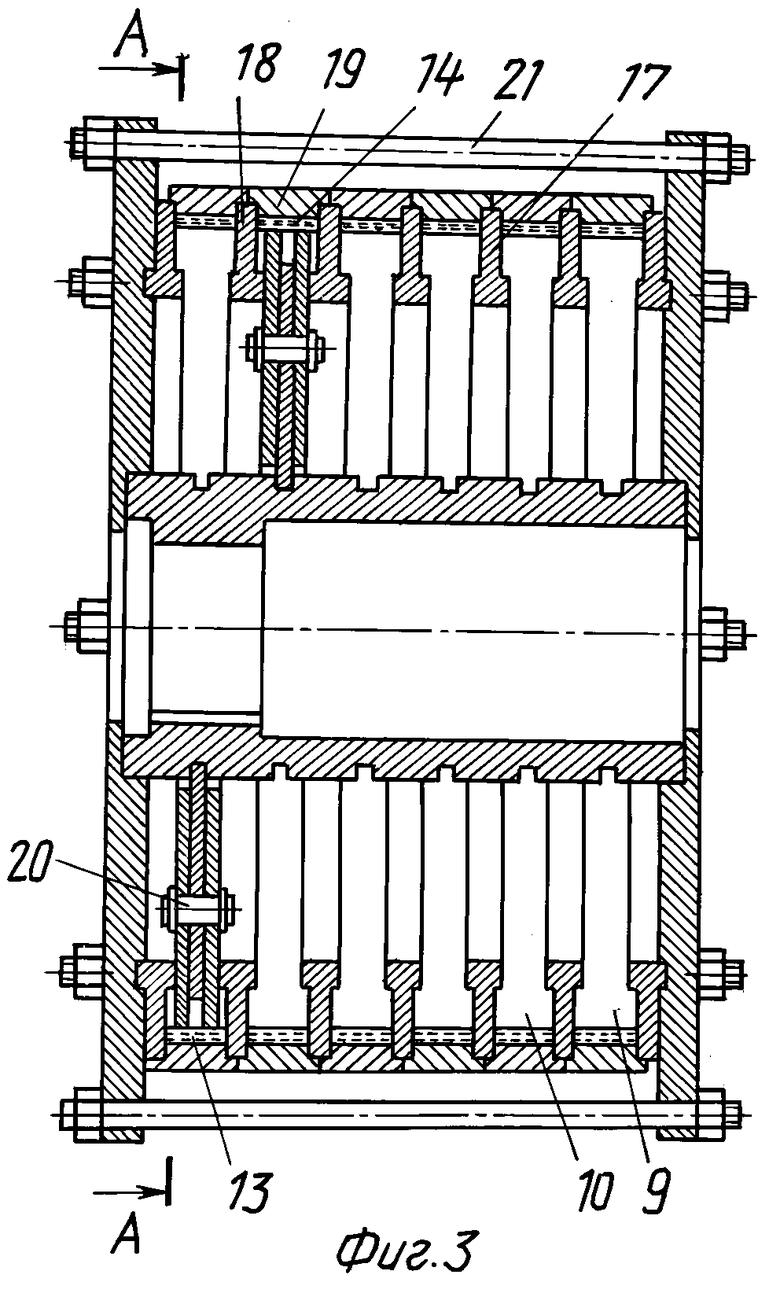
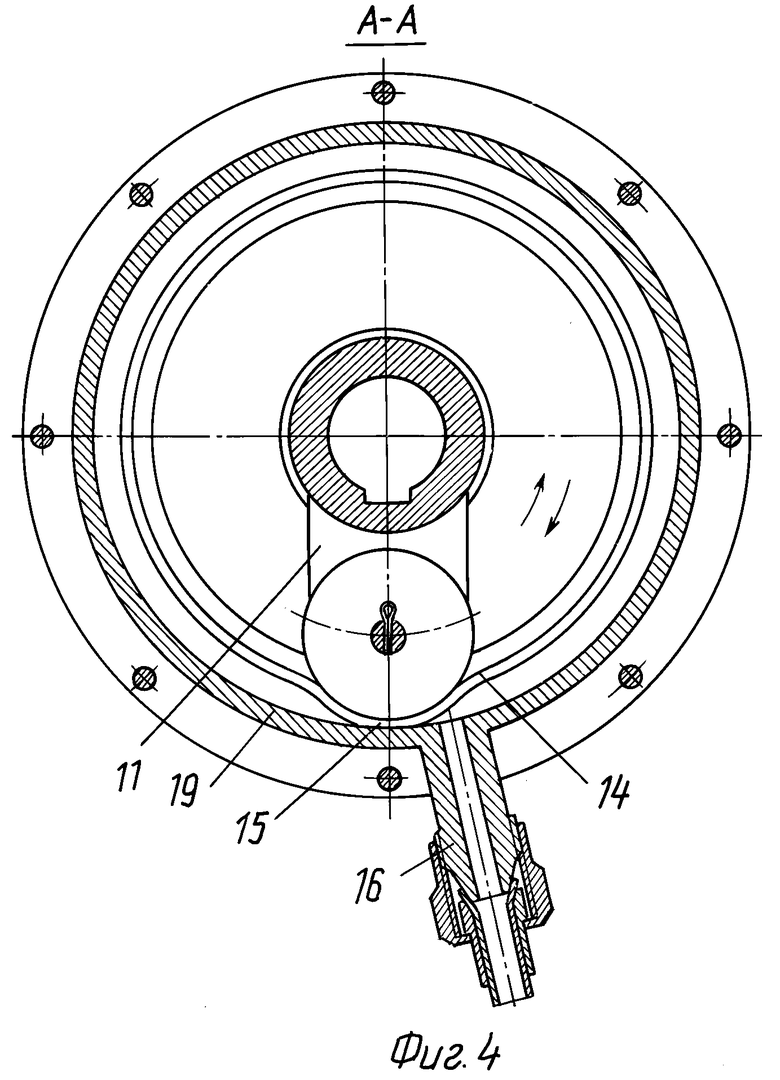
Сущность изобретения поясняется чертежами. На фиг.1 представлена арматура трубопровода - кран шаровой с кулисным и винтовым передаточным механизмом, общий вид; на фиг. 2 - то же, что и на фиг. 1, вид сбоку; на фиг. 3 - ротационно-роликовый двигатель в разрезе; на фиг. 4 - разрез А-А на фиг. 3.
Позиции на чертежах обозначают: 1 - арматура - кран шаровой; 2 - механическая передача крана - винто-рычажный или кулисный механизм с редуктором (или без редуктора); 3 - маховик или штурвал ручного управления; 4 - блок управления; 5 - ротационно-роликовый двигатель; 6 - трубопроводы, подводящие газ от блока управления к двигателю; 7 - штуцеры подвода газа в камеры двигателя; 8 - штуцеры подвода газа в камеры двигателя (в противоположном направлении вращения); 9, 10 - рабочие кольцевые камеры двигателя; 11 - поводок ротора двигателя; 13 - ролик; 14 - гибкая лента; 15 - узлы крепления гибкой ленты; 16 - штуцер подвода сжатого газа от блока управления; 17 - боковые стенки двигателя; 18 - кольцо; 19 - наружная стенка камеры двигателя; 20 - ось ролика; 21 - стяжка двигателя - шпилька с гайками.
Собственно арматура 1 (кран шаровой, задвижка) (фиг. 1 и 2) включает корпус арматуры с крепежным фланцем, запорный орган (шар или заслонка).
Для осуществления заложенной в устройство возможности совмещения в одной механической передаче как ручного привода, так и автоматизированного пневматического привода - на одном валу со штурвалом 3 ручного управления и его механической передачи установлен многооборотный, ротоционно-роликовый двигатель 5 с гибким рабочим элементом (лентой) 14, мощность, давление, рабочей среды и геометрические размеры которого обеспечивают вращающий момент, примерно равный моменту сил, создаваемых штурвалом ручного управления 3. Известно, что усилие на рукоятке штурвала 3 должно быть в пределах 0,15...0,25 кН (15. ..25 кгс). При обычном диаметре штурвала 0,5...1,0 м момент, развиваемый ручным приводом составляет М = 50...500 Нм (5...50 кгм).
Важно, что многооборотный, ротационный, пневматический двигатель 5 устанавливается на одном валу со штурвалом 3 ручного дублера. Тем самым и для ручного привода и для ротационного двигателя 5 можно использовать одну и ту же механическую передачу 2 - рычажно-винтовую или кулисную. Это существенно упрощает конструкцию привода в целом.
При проектировании привода арматуры 1 диаметр двигателя выбирается примерно равным (или меньше) диаметра штурвала 3, что позволяет получить приемлемые габариты привода при достаточном развиваемом моменте.
Управление арматурой предусматривает вращение ротационного двигателя в двух направлениях: по часовой стрелке - например для закрытия крана и против часовой стрелки - например для открытия крана. Для выполнения этой функции в конструкцию двигателя включены рабочие камеры 9, вращающие ротор двигателя, механическую передачу и сам кран в одном направлении и камеры 10, вращающие ротор в противоположном направлении. Те и другие рабочие камеры могут быть полностью подобными, а только при сборке они "развернуты" на 180o. Если необходимые вращающие моменты на кране разные, то количество рабочих камер 9 и 10 в одном двигателе может быть разным. Последнее возможно, если моменты сопротивления на кране различаются в одном направлении и в другом направлении, например - на открытие и на закрытие крана.
Для уравновешивания сил, действующих со стороны ленты на ролики 13 и вращающийся ротор в целом, для балансировки этих сил рабочие камеры, вращающие ротор в одном направлении, например - по часовой стрелке, и в противоположном направлении - против часовой стрелки установлены поочередно, например через одну. Тем самым удается добиться снижения нагрузок на ротор, на подшипники и другие детали двигателя. Камеры 9 и 10, состоящие из колец 18 стенок 19, скреплены стяжками 21.
Устройство работает следующим образом.
Рабочая среда - например импульсный сжатый газ, подводится к блоку управления 4. При подаче сигнала на блок управления 4 включаются соответствующие клапаны блока и газ начинает поступать по соответствующим трубопроводам 6, например - по трубопроводам на открытие арматуры.
Сжатый газ подводится к ротационному двигателю 5 (фиг. 1) через подводящие штуцеры 7 или 8. В случае управления арматурой магистрального газопровода сжатый газ подводится от самого газопровода - так называемый "импульсный газ". Газ под давлением поступает через штуцеры 7 или 8 в рабочие камеры 9 или 10 двигателя, "давит" на гибкую ленту 14, заставляя ее изгибаться, деформироваться. Гибкая лента 14, в свою очередь, давит на ролик 13 и через него - на поводок 11, заставляя вращаться поводок ротора 11 и, тем самым, создавая вращающий момент на валу или втулке ротора и двигателя. Ролик 13 вращается на оси ролика 20. Ротор приобретает некоторую скорость, которая определяется рабочим давлением и площадями проходного сечения штуцера 7, то есть, в конечном итоге - расходом рабочего газа. Уплотнение гибкой ленты 14 по боковым стенкам двигателя 17 и наружной стенке 18 камеры двигателя обеспечивается прокладкой, например из резины, входящей в состав гибкой ленты 14. При подаче противоположного сигнала на блок управления 4 включаются другие клапаны блока и газ начинает поступать по соответствующим трубопроводам, например - по импульсным трубопроводам 6 на закрытие арматуры. Через штуцеры 7 на закрытие арматуры 1 рабочий газ поступает в соответствующие камеры 9 ротационного двигателя 5. Включение (выключение) маховика осуществляется от специальной муфты вручную.
При разработке автоматизированной арматуры с использованием пневматических приводов было сложно подобрать многооборотный двигатель вращения или ротационный двигатель, момент сил на валу которого соответствовал бы моменту сил, создаваемых вручную человеком при вращении штурвала, так как все применяемые для управления арматурой пневматические приводы относятся к устройствам, в которых силы и момент сил, развиваемые пневматическими двигателями, значительно превышают момент сил на рукоятке штурвала. К ним относятся приводы с поршневыми или поворотно-лопастными двигателями /1/ в основном - пневмогидравлические, применяемые на магистральных газопроводах.
Конструкция автоматизированной арматуры содержит кран шаровой с ротационно-роликовым приводом и ручным приводом-дублером. Управление арматурой осуществляется вручную, посредством вращения штурвала, либо автоматически - ротационно-роликовым приводом. В качестве блока управления может применяться типовой блок типа ЭПУУ-4 или БУП.
Был изготовлен и испытан экспериментальный образец устройства, который показал хорошую работоспособность. Он выполнен в условиях обычного механического производства, не требует специальных материалов и специального оборудования.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВИГАТЕЛЬ ПНЕВМОПРИВОДА АРМАТУРЫ ТРУБОПРОВОДА | 2003 |
|
RU2254482C1 |
| ЭЛЕКТРОПРИВОД АРМАТУРЫ ТРУБОПРОВОДОВ | 2005 |
|
RU2276751C1 |
| СИСТЕМА АВАРИЙНОГО ПЕРЕКРЫТИЯ НЕФТЕПРОДУКТОПРОВОДОВ | 2000 |
|
RU2173799C1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДОМ ШАРОВЫХ КРАНОВ | 2006 |
|
RU2330192C1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД СО СТРУЙНЫМ ДВИГАТЕЛЕМ | 2002 |
|
RU2201537C1 |
| СПОСОБ ПОДАЧИ ЭНЕРГОНОСИТЕЛЯ ПНЕВМАТИЧЕСКИМ ПРИВОДАМ АРМАТУРЫ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ | 2006 |
|
RU2287724C1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД ДЛЯ АНТИПОМПАЖНОГО РЕГУЛИРУЮЩЕГО КЛАПАНА ГАЗОПРОВОДА | 2000 |
|
RU2171922C1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД ДЛЯ РЕГУЛИРУЮЩИХ КЛАПАНОВ ГАЗОНЕФТЕПРОДУКТОПРОВОДОВ | 2000 |
|
RU2174629C1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО | 1998 |
|
RU2126497C1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД ДЛЯ РЕГУЛИРУЮЩИХ КЛАПАНОВ | 2003 |
|
RU2248473C1 |
Изобретение предназначено для управления арматурой трубопроводов в системах автоматизации, пневмогидроавтоматики. Арматура трубопровода содержит корпус, запорный орган, управляемый пневматическим ротационно-роликовым двигателем и маховиком ручного управления. Двигатель снабжен силовым элементом в виде гибкой ленты и роликами. Маховик ручного управления расположен на одном валу с ротором двигателя. Ротационно-роликовый двигатель выполнен в виде набора установленных на одном валу кольцевых камер. Одни из камер выполнены с возможностью вращения ротора в одном направлении, а другие - в обратном. В каждой камере расположены гибкая лента и один ролик. Кольцевые камеры, вращающие ротор в одном направлении, развернуты относительно кольцевых камер, вращающих ротор в обратном направлении. Такое выполнение упрощает техническое обслуживание арматуры и расширяет диапазон приводов ее управления. 2 з.п. ф-лы, 4 ил.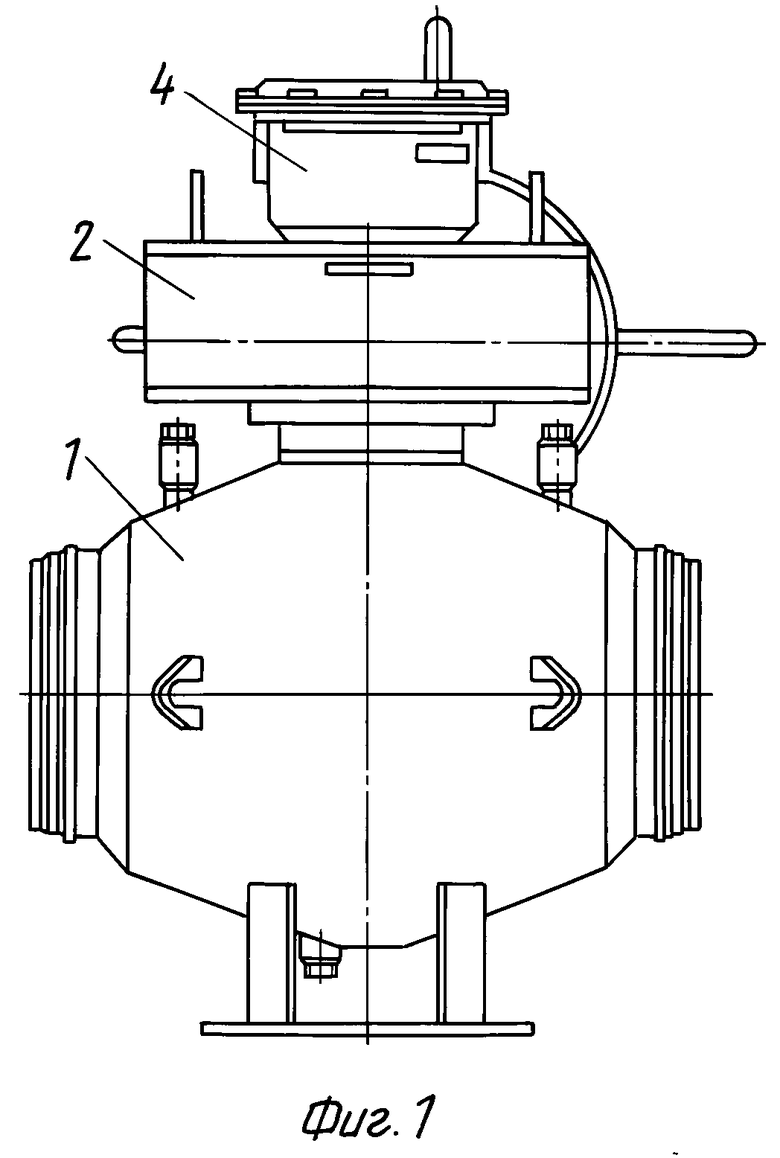
| Привод арматуры | 1987 |
|
SU1555584A1 |
| ПНЕВМОПРИВОД С РУЧНЫМ ДУБЛЕРОМ И ГИДРОДЕМПФЕРОМ | 1993 |
|
RU2053428C1 |
| Электрический привод | 1986 |
|
SU1352140A1 |
| GB 1039195 А, 17.08.1966 | |||
| US 3542331 А, 24.11.1970 | |||
| СИСТЕМА ЧИСЛОВОГО ПРОГРАММНОГО УПРАВЛЕНИЯ МЕТАЛЛОРЕЖУЩИМИ СТАНКАМИ | 0 |
|
SU319382A1 |
| Автоматический огнетушитель | 0 |
|
SU92A1 |

