1
(21)4201717/40-29
(22)19.01.87
(46) 07.04.90. Бюл. № 13
(72) С.Л.Самсонович, А.Н.Чесноков,
В.В.Гормаков, В.П.Кремнев,
С.С-.Уринцев и А.А.Языков
(53) 621.646.(088.8)
(56) Крайнев А.Ф. Словарь справочник
по механизмам. М.: Машиностроение,
1981, с. 57.
Патент США № 3845788, кл. 137-604, 1974.
Авторское свидетельство СССР № 1352140, кл. F 16 К 31/05, 1986.
(54) ПРИВОД АРМАТУРЫ
(57) Изобретение позволяет упростить конструкцию привода арматуры. Приводное устр-во соединено со штоком (Ш) 2 и выполнено в виде расположенного соосно со Ш 2 блока цилиндров 1 с верхней и нижней крышками (К) 14, 10. Цилиндры 1 расположены равномерно по окружности и радиально к Ш 2. Ш 2 снабжен расположенным между К 14 и блоком цилиндров 1 диском 5 с профильным отверстием, соответствующим профилю Ш 2 в этой части. На диске 5
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрический привод | 1986 |
|
SU1352140A1 |
| Пневмопривод с ручным механическим дублером и гидродемпфером | 1986 |
|
SU1355824A1 |
| Электромеханический привод поступательного действия | 2022 |
|
RU2786248C1 |
| ПРИВОД ТРУБОПРОВОДНОЙ ЗАПОРНОЙ АРМАТУРЫ | 1998 |
|
RU2132990C1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ НА ОСНОВЕ ВОЛНОВОЙ ПЕРЕДАЧИ ПОСТУПАТЕЛЬНОГО ДЕЙСТВИЯ | 2003 |
|
RU2265146C2 |
| ЭЛЕКТРОПРИВОД С РУЧНЫМ ДУБЛЕРОМ | 2006 |
|
RU2323380C2 |
| РУЧНОЙ ДУБЛЕР ПНЕВМОПРИВОДА | 1993 |
|
RU2066804C1 |
| ЭЛЕКТРОМОТОРНЫЙ ПРИВОД С РУЧНЫМ ДУБЛЕРОМ | 1996 |
|
RU2103582C1 |
| ПНЕВМОПРИВОД С РУЧНЫМ ДУБЛЕРОМ И ГИДРОДЕМПФЕРОМ | 1993 |
|
RU2053428C1 |
| Электропривод с ручным дублером | 2019 |
|
RU2730750C1 |
Изобретение позволяет упростить конструкцию привода арматуры. Приводное устройство соединено со штоком (Ш) 2 и выполнено в виде расположенного соосно со Ш 2 блока цилиндров 1 с верхней и нижней крышками (К) 14, 10. Цилиндры 1 расположены равномерно по окружности и радиально к Ш 2. Ш 2 снабжен расположенным между К 14 и блоком цилиндров 1 диском 5 с профильным отверстием, соответствующим профилю Ш 2 в этой части. На диске 5 равномерно по окружности закреплены четыре ролика 6, установленных с возможностью взаимодействия своей наружной поверхностью с внутренней поверхностью гибкого колеса 8. К 10 выполнена с отверстием и с винтовой нарезкой в нем. Ш 2 выполнен также с винтовой нарезкой и установлен с возможностью взаимодействия с нарезкой К 10 и совместного вращательного движения с диском 5 и поступательного движения относительно него. Ш 2 непосредственно соединен с маховиком ручного дублера 12. 1 з.п. ф-лы, 3 ил.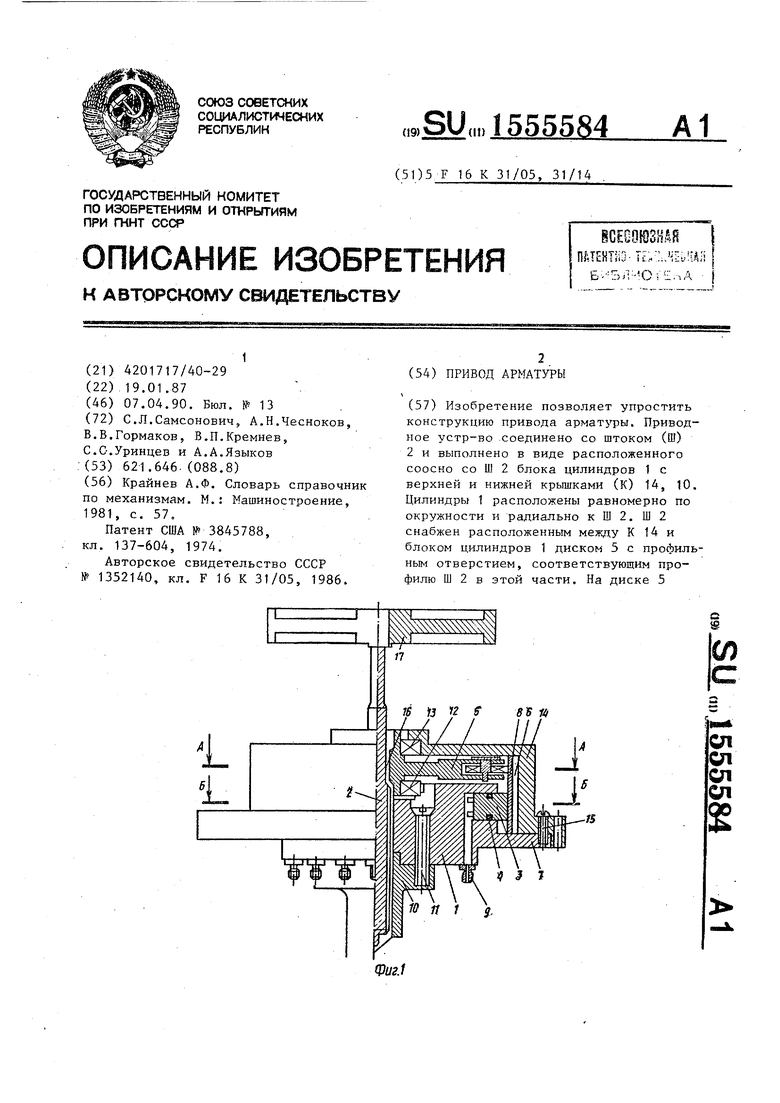
Г
9
П
(Л
16 12
83 К
СП СП СП СП
9
равномерно по окружности закреплены четыре ролика 6, установленных с возможностью взаимодействия своей наружной поверхностью с внутренней поверхностью гибкого колеса 8. К 10 выполнена с отверстием и с винтовой на- т езкой в нем. Ш 2 выполнен также с
15
20
35
Изобретение относится к области риводов запорной арматуры с дистанионным управлением и независимым ручным дублером и может быть исполь- зовано в трубопроводной арматуре.
Цель изобретения - упрощение конструкции.
Указанная цель достигается тем, что приводное устройство выполнено в виде блока цилиндров, расположенного соосно со штоком, а цилиндры в блоке расположены равномерно по окружу ности радиально к штоку, при этом шток снабжен отслеживающим диском, с которым имеет совместное вращательное движение и относительно него поступательное, например за счет прямо- -JQ угольного соединения в сочетании с парой винт-гайка, при этом на отслеживающем диске равномерно по окружности расположены четыре ролика, наружные поверхности которых контактируют с внутренней поверхностью тонкостенного гибкого колеса, которое служит промежуточным звеном для передачи поступательного движения поршней во вращение отслеживающего диска. ,Q Для расширения функциональных возможностей шток запорного устройства непосредственно соединен с маховичком ручного дублера.
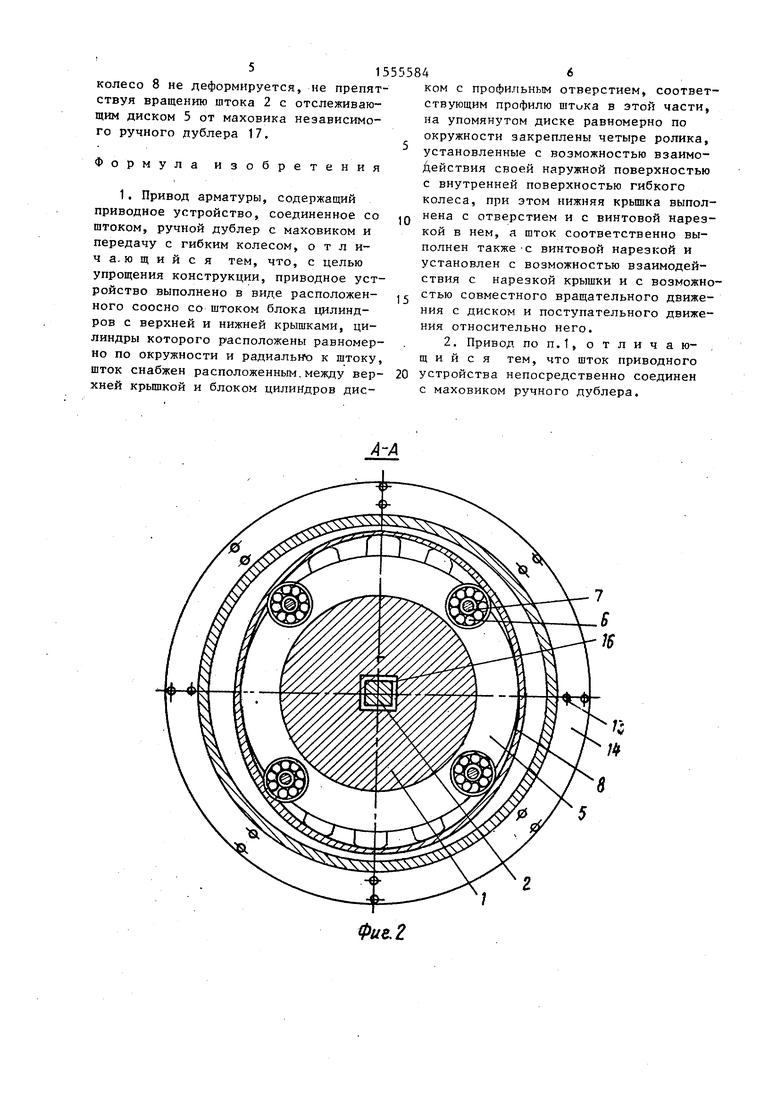
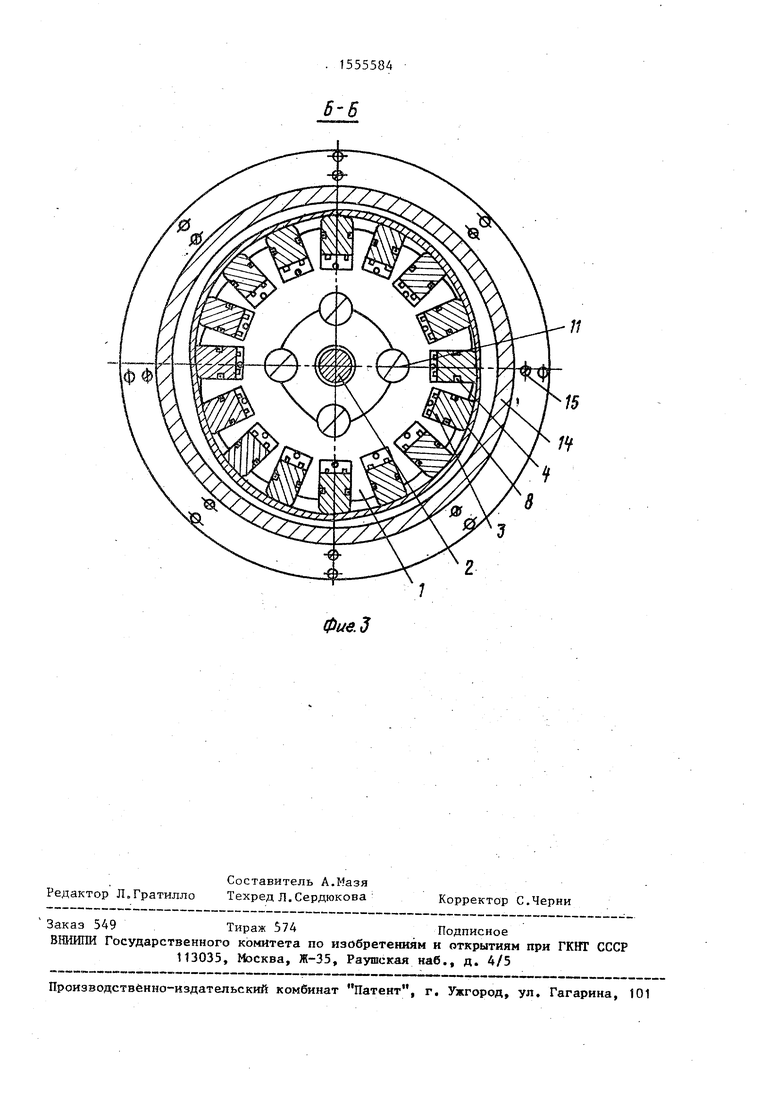
На фиг . 1 изображен привод армату-дз ры, сечение; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1 (сечения на фиг. 2 и 3 повернуты на°45°).
Привод состоит из приводного устройства, выполненного в виде блока 1 цилиндров, расположенного соосно со штоком 2 запорного устройства. В каждом из цилиндров, расположенных в блоке равномерно по окружности, на-, ходятся плунжеры 3 с уплотнением 4. Шток 2 снабжен отслеживающим диском 5, в котором равномерно по окружности расположены четыре ролика 6 ко50
55
винтовой нарезкой и установлен с возможностью взаимодействия с нарезкой К 10 и совместного вращательного движения с диском 5 и поступательного движения относительно него. Ш 2 непосредственно соединен с маховиком ручного дублера 12. 1°з.п.ф-лы, 3 ил.
5
0
35
-JQ ,Q дз
50
55
торые крепятся на осях 7, при этом диаметр наружной поверхности роликов равен внутреннему диаметру недеформированного гибкого тонкостенного колеса 8. Рабочая полость каждого цилиндра имеет подводящий канал к плунжерам через штуцер 9. Блок 2 цилиндров, крепится к нижней крышке 10 при помощи винтов 11. Резьбовое отверстие крышки 10 составляет со штоком 2 винтовую пару. Подшипники 12 и 13 служат для центровки отслеживающего диска 5 относительно блока 1 цилиндров и крышки 14. Последняя крепится к блоку цилиндров при помощи винтов 15. Шток 2 запорного устройства имеет прямоугольное соединение с отслеживающим диском 5 и винтовое соединение с крышкой 10. Шток 2 жестко соединен с маховиком ручного дублера 17.
Привод арматуры работает следующим образом.
В диаметрально расположенные сектора блока 1 цилиндров подача рабочего тела, например сжатого воздуха, осуществляется через штуцер 9. Создавшийся перепад давления в полостях перемещает плунжеры 3, которые деформируют гибкое тонкостенное, колесо 8, создавая при этом волну деформации. При последовательном подключении одних цилиндров к зоне высокого давления, а других к зоне низкого давления, создается перемещение волны деформации. Перемещение волны деформации передается через ролики 6 на отслеживающий диск 5. В результате отслеживающий диск 5 совершает враще- (ние совместно со штоком 2 запорного устройства и штурвалом 17. Наличие прямоугольного соединения 16 штока 2 с отслеживающим диском 5 и пары винт-гайка между штоком 2 и крышкой 10 обеспечивает движение штока 2 и в осевом направлении. При отсутствии рабочего тела гибкое тонкостенное
колесо 8 не деформируется, не препятствуя вращению штока 2 с отслеживающим диском 5 от маховика независимого ручного дублера 17.
Формула изобретения
ком с профильным отверстием, соответствующим профилю штика в этой части, на упомянутом диске равномерно по окружности закреплены четыре ролика, установленные с возможностью взаимодействия своей наружной поверхностью с внутренней поверхностью гибкого колеса, при этом нижняя крышка выполнена с отверстием и с винтовой нарезкой в нем, а шток соответственно выполнен также с винтовой нарезкой и установлен с возможностью взаимодействия с нарезкой крышки и с возможностью совместного вращательного движения с диском и поступательного движения относительно него.
Фиг. 2
Фие.З
в
