Предлагаемое изобретение относится к измерительной технике и может быть использовано для бесконтактного преобразования перемещений объекта (детали) в электрический сигнал.
В настоящее время для оптического измерения положения поверхности детали может быть использована измерительная головка с продольной фокусировкой [1] (аналог), которая состоит из лазера, коллиматора, полупрозрачного зеркала, линзы, колеблющейся точечной диафрагмы, камертонного генератора, фотоприемника, синхронного детектора и вольтметра. Погрешность измерения такой измерительной головки составляет 2 мкм при диапазоне измерения 1 мм, а частота колебаний диафрагмы 525 Гц.
Недостатками такого устройства являются ограничение точности измерений и большие габариты.
Более совершенной является волоконно-оптический датчик перемещений /2/ (аналог), состоящий из источника излучения, подводящего световода, собирающего световода, фотоприемника и отражающего сферического зеркала.
Недостатком этого технического решения является ограничение точности измерений.
Наиболее близким по технической сущности к предлагаемому устройству является бесконтактный датчик перемещении /3/ (прототип), состоящий из управляемого источника излучения, оптической системы, светоделителя, фотоприемника, волоконно-оптического преобразователя, включающий излучающий световод, два собирающих световода; двух фотоприемников, двух излучателей, двух, аналого-цифровых преобразователей, процессора.
Основным недостатком этого устройства является ограничение разрешающей способности из-за того, что при преобразовании аналогового (интенсивность отраженного оптического потока) сигнала в цифровой код шаг квантования остается неизменным.
Предлагаемое изобретение направлено на достижение технического результата, заключающегося в повышении точности измерений.
Согласно изобретению это достигается тем, что оно содержит источник излучения с оптическим выходом, состоящий из оптически связанных управляемого излучателя, оптической схемы, светоделителя и фотоприемника, выход которого подключен к электрическому входу управляемого излучателя; волоконно-оптический преобразователь, содержащий два плеча с коэффициентами преобразования Kвоп1 и Kвоп2, реализованные на основе подводящего и двух собирающих световодов; два фотоприемника, подсоединенные к оптическим выходам собирающих световодов, вход подводящего световода соединен к оптическому выходу источника излучения, плечи волоконно-оптического преобразователя обеспечивают соотношение Kвоп2 = 0,9 Kвоп1, введен измерительный канал с двумя электрическими входами и выходами, причем выходы фотоприемников первого и второго плеч волоконно-оптического преобразователя подключены соответственно к второму и первому входам измерительного канала.
Другим отличием изобретения является то, что подводящий световод, выполнен на основе волокна, а первый собирающий световод состоит из четырех волокон, расположенных так, что их входные торцы размещены в плоскости выходного торца подводящего световода, радиально симметрично вокруг него и образуют общий торец, второй собирающий световод состоит из двенадцати волокон, расположенных радиально симметрично вокруг выходного торца подводящего счетовода, а их входные плоскости смещены в сторону от отражающей поверхности объекта.
Следующим отличием предлагаемого изобретения является то, что измерительный канал состоит из генератора, управляемого напряжением, стробируемого генератора, управляемого напряжением, тактового генератора, элемента совпадения, двух электронных ключей, двух счетчиков, причем первым входом измерительного канала является вход генератора, управляемого напряжением, выход которого подключен к первым входам элемента совпадения и первого электронного ключа, второй вход измерительного канала является первым входом стробируемого генератора, управляемого напряжением, выход которого подключен ко второму входу элемента совпадения и третьему входу второго электронного ключа, выходы электронных ключей соединены со входами счетчиков, выходы которых являются выходами измерительного канала, а второй вход первого электронного ключа соединен с первым выходом тактового генератора, второй выход которого подключен ко второму входу стробируемого генератора, управляемого напряжением, к третьему входу первого электронного ключа и первому входу второго электронного ключа.
Полученная совокупность признаков ранее не была известна и достигается только в данном устройстве.
Работа устройства поясняется чертежами.
На фиг. 1 представлена общая схема бесконтактного датчика перемещений.
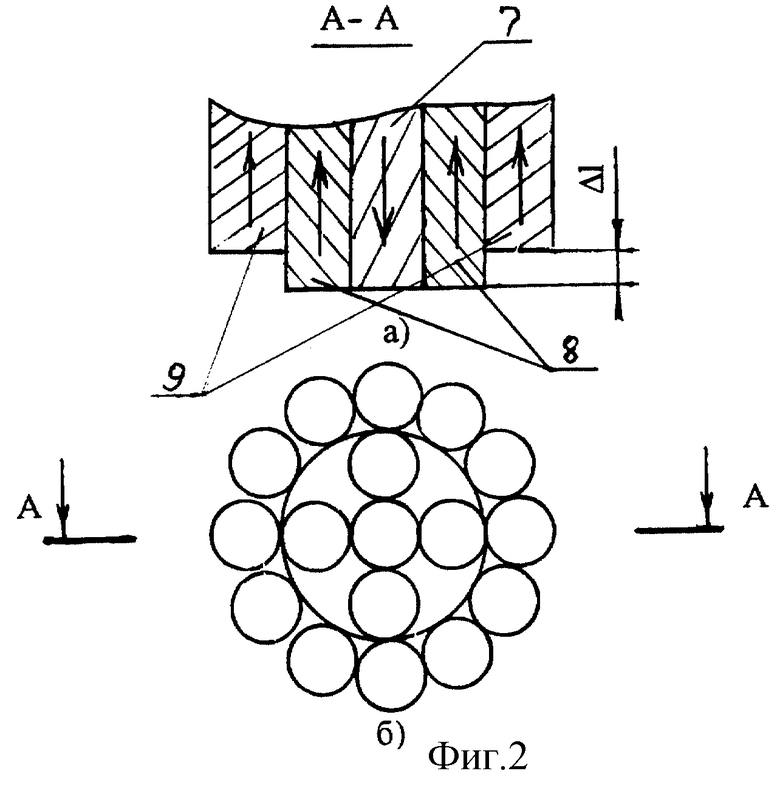
Фиг. 2 иллюстрирует конструкцию волоконно-оптического преобразователя.
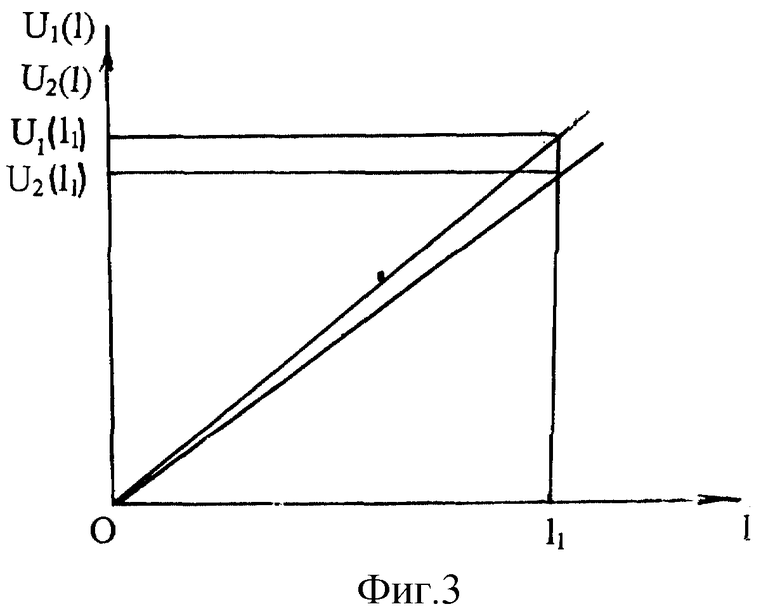
На фиг. 3 изображены функции измерительного преобразования обоих плеч волоконно-оптического преобразователя.
Предлагаемое устройство (фиг. 1) содержит следующие элементы: источник излучения 1, состоящий из управляемого излучателя 2, оптической схемы 3, светоделителя 4 и фотоприемника 5; волоконно-оптический преобразователь (ВОП) 6, имеющий подводящий световод 7, собирающие световоды 8 и 9, фотоприемники 10 и 11, измерительный канал 12, состоящий из генератора, управляемого напряжением (ГУН) 13, стробируемого ГУН 14, тактового генератора 15, элемента совпадения 16, электронных ключей 17 и 18, счетчиков 19 и 20.
Устройство работает следующим образом.
Оптический поток от управляемого излучателя 2 следует через оптическую схему 3 и светоделителем 4 разделяется на два пучка. Первый оптический пучок следует на фотоприемник 5, выходной электрический сигнал которого поступает на электрический вход управляемого излучателя 2. Такое схемное решение приводит к тому, что любые изменения мощности оптического излучателя 2 компенсируются аналогичными измерениями электрического сигнала.
Схема источника излучения 1 на основе излучателя с оптически соединенными оптической схемой 3, светоделителем 4 и фотоприемником 5 представляет собой схему отрицательной обратной связью, которая стабилизирует выходную мощность на выходе источника излучения 1.
ВОП 6 состоит из трех световодов (фиг. 2): подводящего световода 7 и двух собирающих световодов 8 и 9, причем подводящий световод 7 выполнен на основе волокна. Первый собирающий световод 8 состоит из четырех волокон, расположенных так, что их входные торцы размещены в плоскости выходного торца подводящего световода 7, радиально симметрично вокруг него и образуют общий торец. Второй собирающий световод 9 состоит из двенадцати волокон, расположенных радиально симметрично вокруг выходного торца подводящего световода 7, а их входные плоскости смещены в сторону от отражающей поверхности объекта на расстояние Δl (фиг. 2а). Такое конструктивное решение позволяет сформировать два плеча с коэффициентами преобразования: Kвоп1 и Kвоп2.
Оптический поток от источника излучения 1 вводится и распространяется по подводящему световоду 7, освещает поверхность детали 21. Часть отраженного от поверхности объекта 21 оптического потока попадает на торец собирающего световода 8 и образует первое плечо ВОП 1, а другая его часть попадает на торец собирающего световода 9, которое смещено на расстояние Δl, и образует второе плечо ВОП 2.
Собирающие световоды 8, 9 ВОП 6 передают оптическое излучение на фотоприемники 10 и 11, на выходах которых образуются электрические сигналы:
U1(l) = Kвоп1•l, (1)
U2(l) = Kвоп2•l, (2)
где l - расстояние от торца ВОП (общего торца подводящего световода 6 и собирающего световода 7),
Kвоп1, Kвоп2 - коэффициенты преобразования плеч ВОП соответственно ВОП 1 и ВОП 2.
Конструктивно оба плеча ВОП выполнены так, чтобы для коэффициентов преобразования обоих плеч выполнялось соотношение (фиг. 3):
Kвоп2 = 0,9Kвоп1. (3)
После фотоэлектрического преобразования электрические сигналы U1(l) и U2(l) следуют на входы стробируемого ГУН 14 и ГУН 13, на выходах которых формируют сигналы U3(l) и U4(l), соответствующие частоты которых f3(l) и f4(l) определяются выражениями:
f3(l) = 1/T3(l) = Kгун1•U2(l) = Kгун1•Kвоп2•l = K2•l, (4)
f4(l) = 1/T4(l) = Kгун2•U1(l) = Kгун2•Kвоп1•l = K1•l, (5)
где Kгун1 = Kгун2 = Kгун - коэффициенты преобразования блоков ГУН 13 и стробируемого ГУН 14.
Тактовый генератор 15 формирует старт-, стоп-импульсы с частотой fтг = 1/Tтг, которые управляют стробируемым ГУН 14 и электронными ключами 17 и 18.
Стробируемый ГУН 14 запускается стоп-импульсом тактового генератора 15. Импульсы с выхода ГУН 13 с периодом T3(l) = 1/f3(l) поступают на первый вход элемента совпадения 16 и через открытый стоп-импульсом электронный ключ 17 на вход счетчика 19, в котором формируется код N1(l).
На второй вход элемента совпадения 16 непрерывно поступают импульсы с периодом T4(l) = 1/f4(l) от стробируемого ГУН 14. В момент совпадения импульсов от ГУН 13 с периодом T3(l) и стробируемого ГУН 14 с периодом T4(l) срабатывает схема совпадения 16 и закрывает электронный ключ 18 ~ поступление импульсов от стробируемого ГУН 14 на вход счетчика 20 прекращается.
Таким образом, исходя из уравнения (3) и согласно общему алгоритму - работы устройства (соответствующему нониусному способу измерения периода импульсов) образуется следующее выражение:
δ2t = N2(l)T3(l)/10, (6)
где δ2t - абсолютная погрешность квантования для заднего фронта для интервала времени Tтг;
N2(l) - число импульсов, поступивших на счетчик 20.
Так как интервал времени Tтг определяется по сумме отсчетов обоих счетчиков импульсов:
Tтг = N1(l)T3(l) + δ2t = N1(l)T3(l) + N2(l)T3(l)/10 = T3(l)[N1(l) + N2(l)/10], (7)
где N1(l) - число импульсов, поступивших на счетчик 19.
После подставления выражение (4) в (6) и соответствующих преобразований получается
l = fтг[N1(l) + N2(l)/10]/K2. (8)
Полученное выражение показывает, что если погрешность квантования для переднего фронта интервала времени Tтг Δ1t = 0, то погрешность квантования при общем измерении перемещения уменьшается в 10 раз.
Сущность работы устройства заключается в следующем.
Известны конструкции амплитудных волоконно-оптических преобразователей с внешней модуляцией /4/, в которых для увеличения принимаемого оптического потока в принимающем световоде используется несколько волокон. Использование такого технического решения позволяет в одном волоконно-оптическом преобразователе создать два (в общем случае несколько) плеча ВОП 1 и ВОП 2.
Оптимальный подбор пространственного положения приемных волокон обоих плеч ВОП (например предлагаемый вариант смещения приемных волокон приемного световода 9 относительно волокон приемного световода 8 (фиг. 2а)) позволит на определенном диапазоне измерений реализовать условие (3). Выполнение этого условия дает возможность применить нониусный метод измерения амплитуды сигнала /5/ на выходах фотоприемников (за счет уменьшения погрешности квантования), который нашел широкое применение в электронной измерительной технике. Это дает возможность повысить точность измерений перемещений в 10 раз, а управляя соотношением (3) для разных плеч ВОП в зависимости от требуемых условий эксперимента можно управлять точностью измерения перемещений.
Источники информации
1. Застрогин Ю.Ф. Контроль параметров движения с использованием лазеров. Методы и средства. - М.: Машиностроение, 1981, 176 с. (аналог).
2. А. С. N 1539519 (СССР) Волоконно-оптический преобразователь перемещений. Опубл. в Б.И. N 4, 1990 (аналог).
3. Патент N 63-293401 (Япония) МКИ 601 B 11/00. Displacement measuring instrument. Yasunaga Tekkosho K.K. Hideki Miyanishi (прототип).
4. Gook R. I. , Hamm C.W. Fiber optik lever displacement transduser/-Applied Optics, 1979, v. 18, N 19. pp. 3230-3241.
5. Автоматические измерения и приборы (аналоговые и цифровые) /П.П.Орнатский. - 5-е изд. К.: Вища шк. 1986.
Изобретение относится к измерительной технике, а именно к волоконной оптике, и предназначено для бесконтактного преобразования перемещений в электрический сигнал. Устройство содержит источник излучения, состоящий из управляемого излучателя, оптической схемы, светоделителя и фотоприемника, волоконно-оптический преобразователь (ВОП), имеющий подводящий световод и два собирающих световода, два фотоприемника, оптически связанных с собирающими световодами ВОП, измерительный канал, состоящий из генератора, управляемого напряжением (ГУН), стробируемого ГУН, тактового генератора, элемента совпадения, двух электронных ключей, счетчиков. Особенность устройства заключается в том, что используется волоконно-оптический преобразователь с двумя плечами (на основе одного подводящего и двух собирающих световодов), коэффициент преобразования которых находится в следующем соотношении: Kвоп2 = 0,9 Kвоп1. С помощью измерительного канала устройства реализуется нониусный метод измерения, который позволяет повысить точность измерения перемещений в 10 раз. 2 з.п. ф-лы, 3 ил.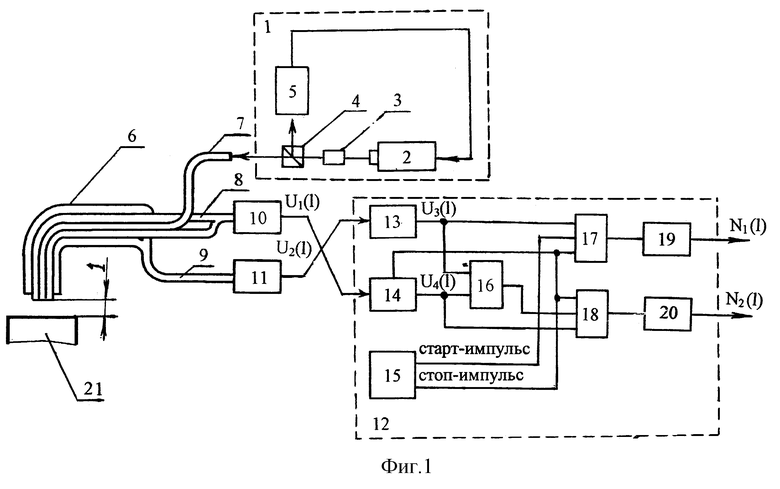
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
| Волоконно-оптический преобразователь перемещений | 1987 |
|
SU1539519A1 |
| Волоконно-оптические датчики | |||
| - Л.: Энергоатомиздат, Ленинградское отд | |||
| Циркуль-угломер | 1920 |
|
SU1991A1 |
| Устройство для экспресс-диагностики билирубинемии | 1989 |
|
SU1694109A1 |
