Изобретение относится к измерительной и волоконно-оптической технике, и может быть использовано в приборо-, станко- и машиностроении для высокоточного бесконтактного измерения линейных (положение l, смещение Δl) и угловых (наклон γ, смещение Δγ) параметров пространственного положения и шероховатости поверхности объекта (деталей, изделий).
В настоящее время для оптического определения параметров пространственного положения деталей широко используется триангуляционный способ измерений [1] (способ-аналог), который заключается в том, что формируют оптический поток, который направляют на деталь, с помощью позиционно-чувствительного фотоприемника регистрируют отраженный оптический поток, по пространственным координатам смещения которого определяют размерные параметры (положение, смещения, угловые наклоны αx и αy) деталей.
Устройство, реализующее этот способ-аналог, - оптическая измерительная головка с поперечной фокусировкой [2] (устройство-аналог), состоящая из источника света, фокусирующих линз, координатно-чувствительного фотоприемника и имеющая диапазон 130 мкм, а погрешность измерения ~1,5 мкм. Это устройство позволяет измерять наклоны (αx,αy), аксиальные смещения поверхности Δl детали.
Однако недостатками аналогов - способа и устройства - являются ограниченные функциональные возможности, не позволяющие определять угловые параметры (наклон γ, смещение Δγ) поверхности объекта без наличия априорной информации о форме объекта, его положении и параметры шероховатости поверхности контролируемого объекта.
Известен рефлектометрический метод измерения параметров шероховатости поверхности [3] (способ-аналог), основанный на использовании зависимости между параметрами излучения, отраженного от шероховатой поверхности, и параметрами поверхности. Так при измерении относительного коэффициента отражения зеркальной (когерентной) компоненты ρз при двух различных длинах волн λ1 и λ2 эта зависимость может иметь следующий вид:
ρз = exp[-(4πσcosθ1/λ)2], (1)
где θ1 - угол между направлением падения пучка и нормалью к поверхности,
σ - среднее квадратическое отклонение поверхности объекта.
Рефлектометр для определения шероховатости [3] (устройство-аналог), который реализует описанный способ, состоит из лазера, шторки, световодов, рукоятки направляющей, диафрагмы, фотоумножителя, светоделительного устройства, объектива, матовых стеклянных экранов, фотосопротивления и измерительного электрического блока.
Недостатками этих способа и устройства (аналогов) являются ограниченные функциональные возможности, не позволяющие контролировать параметры линейных (положение l, смещение Δl) и угловых (наклон γ, смещение Δγ) параметров положения поверхности объекта.
Известен способ определения параметров пространственного положения объекта [4] (способ-аналог), основанный на использовании волоконно-оптического преобразователя (ВОП), состоящего из подводящего (передающего) и отводящего (приемного) каналов, реализованного из двух или нескольких световодов, согласно которому подводящим каналом излучают оптический поток заданной пространственной формы, направляют его на поверхность объекта, отводящим каналом выделяют часть отраженного от поверхности объекта потока, преобразуют ее в электрический сигнал, по параметрам которого судят о параметрах пространственного положения объекта, его формы и отражающих свойств.
Известен бесконтактный датчик перемещений (устройство-аналог) [5], который состоит из излучательного канала, включающего оптический излучатель, коллиматор, светоделитель, фотоприемник; волоконно-оптического преобразователя (ВОП), включающего подводящий световод, два отводящих световода; приемного канала, содержащего два фотоприемника; измерительной схемы, которая включает два усилителя, два аналого-цифровых преобразователя и процессор.
Этими способом и устройством (аналогами) можно измерять аксиальные перемещения деталей. Для измерения углов наклона допустимо использовать несколько (минимум два) таких устройств в режиме измерения аксиальных перемещений в плоскости наклона. Обработкой сигналов датчиков можно определить значения линейных и угловых смещений.
Недостатками, присущими этим способу и устройству (аналогам), являются ограничения функциональных возможностей, связанные с необходимостью перемещения объекта при определении параметров шероховатости поверхности деталей, сложная конструкция, предполагающая использование излучающего световода в каждом ВОП и введение оптических элементов для увеличения диапазона измерений, ограничение точности измерений, из-за низкого соотношения сигнал/шум выходного сигнала, вследствие приема отводящими световодами только ограниченной части конуса излучающего оптического потока (апертуры) подводящего световода.
Наиболее близким по технической сущности и по количеству общих признаков к предлагаемому является триангуляционный способ измерения расстояний с использованием структурированного освещения [6] (способ-прототип), основанный на том, что формируют оптический поток, в прозрачной среде создают периодическую структуру с заданными оптическими параметрами, оптический поток пропускают через прозрачную среду перпендикулярно к плоскости периодической структуры, после которой в результате дифракции оптического потока получают набор дифракционных порядков, распространяющихся симметрично относительно центрального дифракционного порядка, не отклонившегося после дифракции, освещают дифракционными порядками поверхность объекта, выделяют отраженные от поверхности объекта дифракционные порядки, осуществляют фотоэлектрическое преобразование отраженных дифракционных порядков, формируют выходные электрические сигналы, по параметрам которых судят о расстоянии до поверхности объекта.
Высокая эффективность этого способа проявляется для объектов со значительным влиянием шероховатости поверхности, когда Ra>λ/4 на погрешность измерений расстояний существенное влияние оказывает пространственный шум, вызванный неравномерностью рассеяния зондирующего излучения на случайной микроструктуре поверхности. Использование в качестве освещающего (зондирующего) потока набора, состоящего из нескольких узких пучков, приводит к снижению погрешности как отдельных пучков, так и погрешности измерения расстояния до поверхности объекта.
Устройство, реализующее способ-прототип, состоит из излучателя, дифракционной решетки, диафрагмы, линзы, объектива, фотодиодной линейки.
Недостатками этих способа и устройства (прототипов) являются:
- ограничение функциональных возможностей и области использования, вызванное невозможностью определения угловых параметров (наклон γ, смещение Δγ) поверхности объекта без наличия априорной информации о форме объекта, его положении [7] и невозможностью оценки параметров шероховатости поверхности объекта;
- большие габариты устройства;
- большая область контроля, определяемая расстоянием между крайними световыми пятнами, образуемыми освещающими дифракционными порядками.
Предлагаемое изобретение направлено на достижение технического результата, заключающегося в расширении функциональных возможностей, уменьшении размеров устройства и области контроля.
Согласно изобретению это достигается тем, что формируют оптический поток, в прозрачной среде создают периодическую структуру с заданными оптическими параметрами, оптический поток пропускают через прозрачную среду перпендикулярно к плоскости периодической структуры, после которой в результате дифракции оптического потока получают набор дифракционных порядков, распространяющихся симметрично относительно центрального дифракционного порядка, не отклонившегося после дифракции, освещают дифракционными порядками поверхность объекта, выделяют отраженные от поверхности объекта дифракционные порядки, осуществляют фотоэлектрическое преобразование отраженных дифракционных порядков, формируют выходные электрические сигналы, по параметрам которых судят о расстоянии до поверхности объекта, в прозрачной среде в плоскости первой периодической структуры дополнительно вводят другие периодические структуры, задают их число, оптические параметры и направления распространения, в результате дифракции оптического потока на введенных периодических структурах получают дифракционные порядки, распространяющиеся симметрично относительно центрального дифракционного порядка, подведение оптического потока к прозрачной среде, выделение частей отраженных дифракционных порядков и передачу их для фотоэлектрического преобразования осуществляют посредством световодов, по параметрам выходных сигналов судят об угле наклона поверхности объекта.
Отличие способа состоит также в том, что изменяют длину волны сформированного оптического потока, а по параметрам выходных электрических сигналов судят о шероховатости поверхности объекта.
Другое отличие способа состоит также в том, что осуществляют модуляцию сформированного оптического потока.
Соответственно предложенное устройство, реализующее данный способ, содержит последовательно расположенные по ходу излучения источник излучения, линзу, дифракционную решетку с одной периодической структурой, блок фотоприемников, выходы которого являются электрическими выходами устройства, дифракционную решетку снабжают периодическими структурами, общим числом m, при этом вводят волоконно-оптический преобразователь, состоящий из отводящих и подводящего световодов, причем последний размещают между источником излучения и линзой, а число отводящих световодов р определяется условием р≥2mk, где k-1, 2.... n - число используемых дифракционных порядков; при этом дифракционная решетка и торцы отводящих световодов образуют общий торец, причем торцы отводящих световодов расположены вдоль направлений распространения введенных периодических структур вокруг оси подводящего световода, в блок фотоприемников вводят фотоприемники и оптически сопрягают с отводящими световодами, при этом общее число фотоприемников равно количеству отводящих световодов.
Отличие устройства состоит также в том, что линза и дифракционная решетка выполнены в виде единого оптического элемента, закрепленного на торце подводящего световода.
Полученное новое качество от данной совокупности признаков ранее не было известно и достигается только в данных способе и устройстве.
Способ и работа устройства поясняется чертежами.
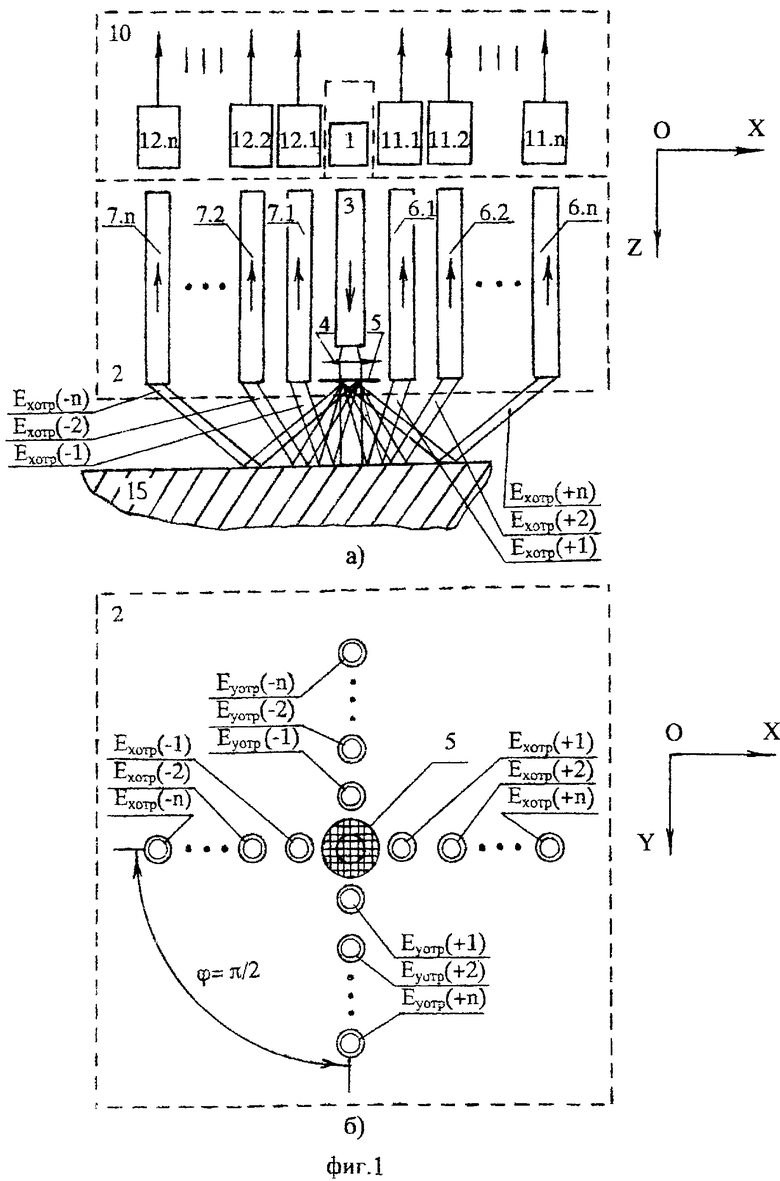
На фиг. 1 представлена схема устройства, реализующего способ, отводящие световоды которого расположены по перпендикулярным осям X, Y (ϕ = π/2; m=2).
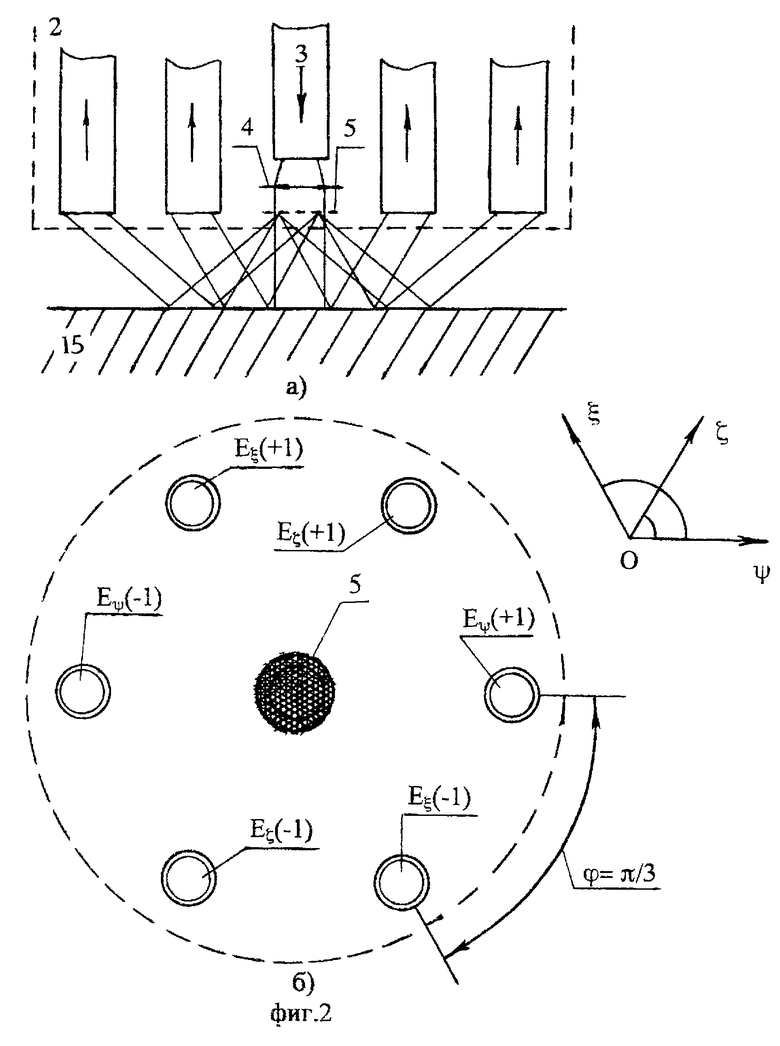
Фиг. 2 демонстрирует схему устройства, реализующего способ, с шестью отводящими световодами (ϕ = π/3; m=3) по трем осям ξ,ψ и ζ.
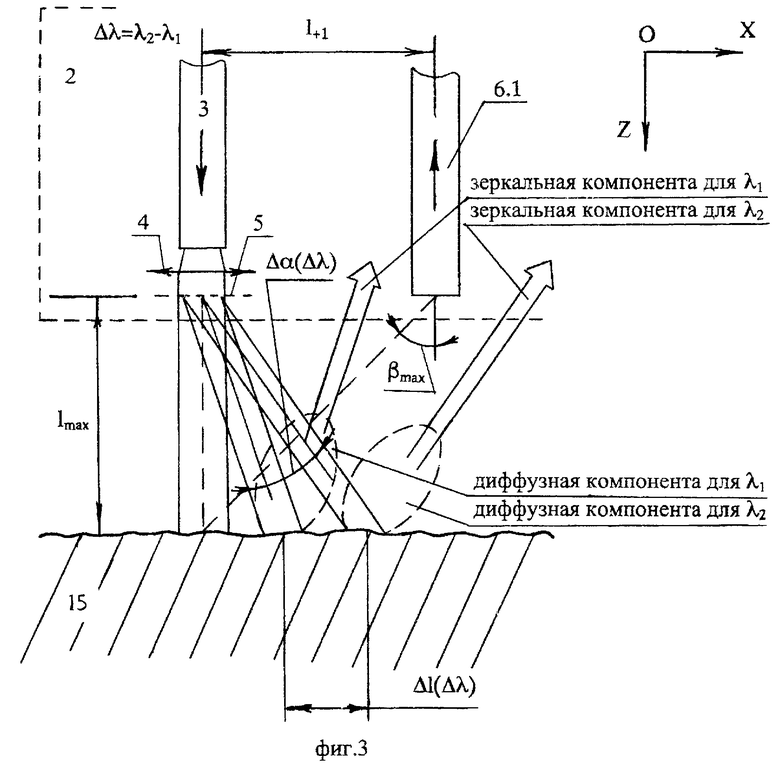
Фиг. 3 поясняет процесс определения параметров шероховатости поверхности и условия пространственной фильтрации отводящим световодом.
Устройство, реализующее предлагаемый способ, для случая с перпендикулярным (ϕ = π/2) расположением отводящих световодов (фиг.1), содержит следующие элементы: источник излучения 1, волоконно-оптический преобразователь (ВОП) 2, состоящий из подводящего световода 3, линзы 4, дифракционной решетки 5, отводящих световодов 6-9, расположенных по осям: Х-6.1, 6.2....6.n; - Х-7.1, 7.2..,.7.n; Y-8.1, 8.2....8. n; -Y-9.1, 9.2....9.n; блок фотоприемников 10, фотоприемники 11-14 которого расположены по осям: Х-11.1, 11.2... .11.n; -X-12.1,12.2....12.n; Y-13.1, 13.2....13.n;-Y-14.1, 14.2....14.n.
Устройство работает следующим образом.
Оптический поток от источника излучения 1 попадает в подводящий световод 3 ВОП 2, проходит по нему, направляется на линзу 4. Расходящийся оптический поток после подводящего световода 3 линзой 4 преобразуется в коллимированный пучок, следующий через дифракционную решетку 5.
Дифракционная решетка 5 (фиг.1б) представляет собой прозрачную среду, содержащую две (m= 2) перпендикулярные (ϕ = π/2) периодические структуры с равномерным пропусканием, например, в виде последовательности прозрачных щелей и непрозрачных штрихов и равными шагами Λ = Λx = Λy вдоль осей Х и Y в виде квадратного растра. Дальнейшее описание составлено для такого растра.
Коллимированный пучок, проходя через двумерную дифракционную решетку 5, подвергается дифракции и пространственно перераспределяется на набор дифракционных порядков, состоящий из центрального нулевого (не отклонившегося) Е(0) и совокупности дифракционных порядков Ex(±k) и Ey(±k), отклонившихся вдоль осей Х и Y под углами [8]:
α = arcsinlλ/Λ, (2)
где λ - длина волны света, Λ = Λx = Λy - шаг дифракционной решетки, k=1, 2...n - номера дифракционных порядков.
Ненулевые Ex(±k) и Ey(±k) следуют симметрично относительно центрального Е(0) дифракционного порядка в плоскостях ZOX и ZOY (фиг.1) к поверхности объекта 15, отражаются от нее и освещают торцы отводящих световодов 6-9. Последние, размещенные также рядами вдоль осей Х и Y, принимают пучки отраженных дифракционных порядков Exoтp(±k) и Eyoтp(±k) и передают их для фотопреобразования блоком фотоприемников 10. На его выходах формируются сигналы Ux(±k) и Uy(±k) (на фиг.1 не обозначены) пропорциональные интенсивности отраженных дифракционных порядков.
Аксиальные перемещения Δlz объекта 15 по оси Z приводят к одновременному смещению (подобно сжатию или расширению) всех отраженных дифракционных порядков по осям Х и Y относительно торцов отводящих световодов 6-9 и к изменениям сигналов ΔUx(±k) и ΔUy(±k). По совокупности выходных электрических сигналов ΔUx(±k) и ΔUy(±k) можно судить о линейных параметрах положения 1 и/или смещения Δl.
Угловой наклон γ объекта 15 приводит к угловому смещению порядков Ехотр(±k) и Eyoтp(±k) и неравномерным изменениям засветки торцов отводящих световодов 6-9. По совокупности выходных электрических сигналов ΔUx(±k) и ΔUy(±k) можно судить о параметрах углового наклона γ.
В дифракционной решетке 5 устройства на фиг.2 используются три (m=3) периодические структуры, распространяющиеся вдоль осей ξ,ψ и ζ, расположенные с равным угловым шагом ϕ = π/3, с синусоидальным пропусканием света и равными шагами Λ = Λξ = Λψ = Λζ. Результатом дифракции будет набор дифракционных порядков, состоящий из центрального нулевого Е(0) и трех пар первых дифракционных порядков Eξ(±1),Eψ(±1) и Eζ(±1) [8]. Режим работы такого устройства аналогичен описанному выше.
При значении шероховатости Ra<λ/4 рассеянием отраженных дифракционных порядков можно пренебречь и поверхность объекта можно считать зеркальной. В этом случае усреднение по всей совокупности выходных сигналов фотоприемников 11-14 в режиме аксиальных перемещений Δlz объекта 15 повышает точность измерений за счет уменьшения случайной составляющей сигналов.
Число отводящих световодов р определяется условием р≥2mk, где k=1, 2...n - количество используемых дифракционных порядков, a m - число применяемых периодических структур. Так для устройства на фиг.2 число отводящих световодов р=6.
При изменении длины волны Δλ устройство работает следующим образом.
Источник излучения 1 изменяет длину волны оптического потока в пределах Δλ∈[λ1;λ2], что приводит в соответствии с (1) к изменениям углов дифракции Δα = arcsinkΔλ/Λ (фиг.3). При этом световые пятна от ненулевых дифракционных порядков перемещаются по поверхности объекта 15 и как-бы ощупывают, сканируют ее по линии контроля Δl(Δλ). Выделение торцами отводящих световодов 6-9, выполняющих роль диафрагм с размерами dcв, угловых секторов (частей) индикатрисы рассеяния отраженных дифракционных порядков позволяет в итоге получить электрические сигналы, на основе которых можно определить зависимости ΔUx(±k)/Δλ и ΔUy(±k)/Δλ. Эти зависимости содержат информацию о пространственном распределении составляющих отраженного света (диффузные и зеркальные компоненты) и позволяют определить некоторые параметры шероховатости (Ra, Rq, S и др.) поверхности объекта 15, например, за счет сравнения их с аналогичными зависимостями для калиброванных поверхностей.
Кроме того, использование полученных зависимостей ΔUx(±k)/Δλ и ΔUy(±k)/Δλ для очень шероховатых поверхностей с Ra>λ/4 позволяет наиболее точно определить линейные (положение l, смещение Δl) и угловые (наклон γ, смещение Δγ) параметры пространственного положения поверхности объекта 15, т. к. за счет усреднения по всему диапазону длин волн Δλ и по всем выходным сигналам можно значительно уменьшить случайные составляющие от пространственного шума, вызванного неравномерным рассеянием оптических потоков на случайной микроструктуре поверхности [6] и интерференцией локальных лучей, приводящих к образованию спекл-картины.
В общем случае, предпочтительно расположение периодических структур в дифракционной решетке 5 с равномерным угловым шагом ϕ, например, ϕ = π/2 (фиг. 1) или ϕ = π/3 (фиг. 2). Однако при наличии априорной информации о пространственных параметрах движений контролируемого объекта 15 допустимо расположение нескольких периодических структур и с неравномерным угловым шагом ϕ.
Для исключения влияния внешней засветки на результаты измерений предлагается использовать модуляцию сформированного оптического потока с последующим синхронным детектированием полученных электрических сигналов ΔUx(±k) и ΔUy(±k).
Сущность изобретения заключается в следующем.
1. В связи с тем, что параметры функции преобразования ВОП зависят от диаграмм направленности подводящего и отводящих световодов [4], то для реализации многодиапазонного устройства предлагается создать оптический поток в виде веера, набора локальных пучков дифракционных порядков. При этом, задавая параметры дифракционной решетки (количество и направление распространения периодических структур, шаг Λ, функция пропускания) и световодов (диаметр dсв, количество, тип и пространственное положение), можно формировать устройства с нужными параметрами функций преобразования для разных диапазонов измерений.
Как видно, за счет пространственного перераспределения оптического излучения в результате дифракции и получения в итоге нескольких перекрывающихся локальных диапазонов (для разных дифракционных порядков) можно, с одной стороны, добиться увеличения общего диапазона измерения и обеспечить однозначность измерений, а с другой - повысить соотношение сигнал/шум сигналов и точность измерений.
2. Использование нескольких периодических структур, расположенных в плоскости одной дифракционной решетки, позволяет сформировать и компактно разместить максимальное количество дифракционных порядков в пределах минимальной площадки. Это уменьшает размеры устройства, область контроля и расширяет область использования способа за счет измерения деталей, например, с малыми и/или узкими участками поверхности.
3. В изобретении также предлагается расширить функциональные возможности измерений путем управляемого ощупывания (сканирования) поверхности объекта дифракционными порядками за счет изменения длины волны Δλ источника излучения. Это приводит к изменениям углов дифракции Δα по (2), а выделение отводящими световодами узких угловых
секторов индикатрис рассеяния отраженных дифракционных порядков (фиг.3) дает возможность, во-первых, по пространственному распределению отраженного света (диффузная и зеркальная компоненты) судить о значениях параметров шероховатости поверхности объекта [3]. Так как обычно в пределах линии контроля Δl(Δλ) статистические параметры шероховатости (Ra, Rq, S) неизменны [3] , то их можно оценить на основе полученных зависимостей ΔUx(±k)/Δλ и ΔUy(±k)/Δλ сравнивая, например, с аналогичными зависимостями полученными для калиброванных (образцовых) поверхностей.
Во-вторых, с помощью полученных зависимостей ΔUx(±k)/Δλ и ΔUy(±k)/Δλ для поверхностей с Ra>λ/4 можно наиболее точно определить линейные и угловые параметры пространственного положения поверхности объекта, т.к. за счет усреднения (по всему диапазону Δλ и по всем выходным сигналам) можно уменьшить составляющие пространственного шума, вызванные неравномерным рассеянием потока на случайной микроструктуре поверхности [6].
4. Ограничение угла входа лучей в отводящий световод значением βmax [9], эквивалентно проявлению им фильтрующих свойств, препятствующих попаданию вредной засветки от "чужих" и/или смежных оптических потоков.
Так, например, для подавления нулевого порядка отводящим ступенчатым световодом (при βmax = const), принимающим первый отраженный дифракционный порядок Еотр(+1) (фиг. 3), максимальное удаление объекта от торца ВОП lmax можно определить как
lmax ≈ l+1/sinβmax = l+1/Na, (3)
где l+1 - расстояние между осями подводящего и первого отводящего световодов, NA = sinβmax - числовая апертура световода.
Так как числовая апертура NA широко используемых световодов обычно равна 0,18-0,23 [9], поэтому получается lmax≈5l+1.
Параметр βmax также определяет максимальное число используемых дифракционных порядков k. Для оптической схемы на фиг.3 можно упрощенно записать: βmax = arcsinNA ≈ γ+α = γ+arcsin(Kλ/Λ), а затем привести к виду
k = [Λsin(arcsinNA-γ)/λ], (4)
где [...] - целая часть числа.
При расчете, проведенном для значений λ=0,6 мкм, NA=0,23, Λ=10 мкм и γ= 5o, получается k=[2,4]=2.
В режиме аксиальных перемещений (при γ=0) формула (4) принимает вид:
k=[ΛNA/λ], (5)
и при тех же значениях λ, NA и Λ получается k=[3,83]=3.
Использование в качестве отводящего градиентного световода (βmax = var), повышает степень подавления (фильтрации) вредных засветок, но при этом уменьшает максимальное число используемых дифракционных порядков k.
Конструкция ВОП может быть как с общим плоским торцом, если оси отводящих световодов нацелены на точку фокуса lф, так и с вогнутым сферическим торцом радиусом Rсф с фокусом на поверхности объекта.
Перестройка длины волны и формирование модулированного режима источника излучения может быть осуществлена, например, за счет управления режима работы лазерных диодов [9,10].
В качестве блока фотоприемников допустимо использовать фотодиодные или ПЗС-линейки и матрицы, оптически сопряженные со световодами, как в [11].
Для уменьшения размеров ВОП дифракционная решетка и линза могут быть выполнены в виде единого оптического элемента, выполненного, например, на основе полимерного волновода, подобно рассмотренным в [12], который закреплен на торце подводящего световода.
Источники информации
1. Застроган Ю.Ф. Контроль параметров движения с использованием лазеров: Методы и средства. - М.: Машиностроение, 1981. - 176 с. (способ - аналог).
2. Координатные измерительные машины и их применение /А.А. Гапшис, А.Ю. Каспарайтис, М. Б. Модестов и др. - М. : Машиностроение, 1988. - 328 с. (устройство-аналог).
3. Кучин А.А., Обрадович К.А. Оптические приборы для измерения шероховатости поверхности. - Л.: Машиностроение. 1981. - 197 с. (способ и устройство-аналоги).
4. Зак Е.А. Волоконно-оптические преобразователи с внешней модуляцией. - М.: Энергоатомиздат, 1989. - 128 с., ил. (способ - аналог).
5. Патент Японии 63-293401, МКИ G 01 В 11/00. Displacement measuring instrument. Yasunaga Tekkosho K.K. Hideki Miyanishi (устройство-аналог).
6. Голубев И.В., Плотников С.В. Повышение точности триангуляционных измерений с использованием структурированного освещения // Автометрия, 1999, 6, с.38-47 (способ- и устройство-прототипы).
7. Вертопрахов В.В. Влияние формы объекта и ориентации его поверхности на точность лазерных триангуляционных измерений // Автометрия, 1995, 6, с. 64-68.
8. Калитеевский Н.И. Волновая оптика. Уч. пособие для вузов. - М., 1995.
9. Световодные датчики /Б.А.Красюк, О.Г. Семенов, А.Г.Шереметьев и др. - М.: Машиностроение, 1990. - 256 с.
10. Yuan L. White-light interferometric fiber-optic strain sensor from three-peak-wavelength broadband LED sourse // Applied Optics, 1997, v.36. 25, p.6246-6250.
11. A.c. СССР 2156435, МПК G 01 С 21/24. Солнечный датчик. Витриченко Э. И., Щербаков В.В. Опубл. в БИ 45, 07.12.92.
12. Waldhausl R., Schnabel В., Dannberg P., Kley E.-B., Brauer A., Karthe W. Efficient coupling into polymer waveguides by gratings // Applied Optics, v.36, 36, 1997, p.9383-9390.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ ПАРАМЕТРОВ ГРАНИЦЫ ОБЪЕКТА | 2000 |
|
RU2172470C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОТКЛОНЕНИЙ ОТ ПРЯМОЛИНЕЙНОСТИ | 2000 |
|
RU2175753C1 |
| СПОСОБ КОНТРОЛЯ ОПТИЧЕСКОГО ВЗАИМОДЕЙСТВИЯ С ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2188389C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ГРАНИЦЫ ОБЪЕКТА | 1999 |
|
RU2157964C1 |
| БЕСКОНТАКТНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ | 1999 |
|
RU2156435C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАЗМЕРОВ ДЕТАЛЕЙ | 1999 |
|
RU2158416C1 |
| СПОСОБ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ЭЛЕМЕНТОВ ПОВЕРХНОСТЕЙ | 1999 |
|
RU2158414C1 |
| СПЕКТРАЛЬНОЕ УСТРОЙСТВО | 1996 |
|
RU2094758C1 |
| СПОСОБ КОМПЛЕКСНОЙ ОЦЕНКИ ПАРАМЕТРОВ ПРЕОБРАЗОВАТЕЛЕЙ ИЗОБРАЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2177163C2 |
| СПОСОБ МОДУЛЯЦИИ ИНТЕНСИВНОСТИ ИЗЛУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2168155C2 |
Изобретение относится к измерительной и волоконно-оптической технике и может быть использовано в приборо-, станко- и машиностроении для высокоточного бесконтактного измерения линейных (положение l, смещение Δl) и угловых (наклон γ, смещение Δγ) параметров пространственного положения и шероховатости поверхности объекта (деталей изделий). Изобретение основано на использовании волоконно-оптического преобразователя, состоящего из подводящего и отводящих световодов, линзы и дифракционной решетки, формировании с помощью дифракционной решетки набора дифракционных порядков по двум (или нескольким) осям, освещении ими поверхности объекта и передачи отраженных от поверхности объекта дифракционных порядков отводящими световодами для фотопреобразования. Аксиальные, угловые смещения поверхности объекта приводят к разным изменениям формируемых выходных сигналов, анализ которых позволяет определять тип и значения этих смещений. Использование набора выходных сигналов позволяет получить функции преобразования с разными параметрами диапазонов и уменьшить случайные составляющие погрешности измерений. За счет перестройки длины волны излучателя, приводящей к изменениям углов дифракции, поверхность объекта сканируется (ощупывается) пучками дифракционных порядков, что, в конечном итоге, позволяет оценить пространственные распределения диффузной и зеркальной компонент индикатрисы рассеяния, содержащих информацию о параметрах шероховатости поверхности объекта. 2 с. и 3 з.п. ф-лы, 3 ил.
| Устройство для контроля положения движущегося объекта | 1988 |
|
SU1566213A1 |
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |
| US 5453838 А, 26.09.1995 | |||
| JP 63293401, 30.11.1988. | |||

