Изобретение относится к измерительной технике, а именно к лазерной, волоконной интерферометрии, и может быть использовано для контроля геометрических параметров сложнопрофильных, корпусных объектов (изделий, деталей) на координатно-измерительных машинах (КИМ) в станко-, приборо- и машиностроении.
В настоящее время для координатных измерений изделий на КИМ наибольшее распространение получили контактные методы (аналоги) с использованием контактных измерительных головок /1, 2/. Суть контактного метода заключается в том, что при соприкосновении круглого наконечника измерительной головки с поверхностью детали у первой изменяется параметр измерительной цепи. В момент фиксации такого изменения контролируемого параметра происходит определение, считывание трех координат X, Y, Z фиксируемой точки.
В качестве контролируемого параметра могут выступать частота микроколебаний наконечника, его смещения /3/, изгиб, индуктивность и сопротивление электрической цепи. Последний параметр из-за простоты используется чаще всего, при этом касание с деталью приводит к разрыву электрической цепи.
Известна головка /2/ (устройство-аналог) состоит из корпуса, в основании которого через 120o установлены три пары шариков, фланца, к которому прикреплен измерительный наконечник, состоящий из стержня и контактного элемента. Базирование фланца в корпусе осуществляется посредством трех роликов, прикрепленных на торце фланца также через 120o и сопряженных с тремя призмами, образованными из шариков. Ролики и шарики одновременно являются электроконтактами, соединенными в последовательную цепь. Фланец прижат пружиной. Разъем и гайка предназначены для соответственно электрического и механического подсоединения к КИМ.
При соприкосновении наконечника с деталью фланец поворачивается относительно оси, перпендикулярной оси головки, или перемещается вдоль оси. Вследствии этого размыкается по крайней мере один электроконтакт, что используется для образования управляющего сигнала. Головки чувствительны в различных направлениях в полупространстве ±Х±Y +Z (180 телесных градусов). Измерительный наконечник не может смещаться и головка не чувствительна в направлении -Z.
К основным недостаткам контактного способа и устройства следует отнести низкую скорость измерений и различную чувствительность в разных направлениях (анизотропия чувствительности).
Известен способ контроля оптического взаимодействия с объектом /4/ (способ-аналог), заключающийся в том, что используют интерферометр Майкельсона с оптическим измерительным каналом, задают оптические параметры этого интерферометра, формируют в нем опорный и измерительный оптические потоки, между которыми задают разность хода, освещают объект и принимают отраженный от объекта оптический поток в виде светового луча оптическим измерительным каналом и создают одномерную диаграмму направленности, задают разность хода для опорного и отраженного от объекта оптических потоков, пространственно совмещают опорный и отраженный от объекта оптические потоки и добиваются их интерференции, осуществляют фотоэлектрическое преобразование интерферирующих оптических потоков в выходной электрический сигнал, измеряя его значение, контролируют значение оптического взаимодействия с объектом.
Бесконтактная измерительная головка, реализующая этот способ (устройство-аналог), состоит линзы, измерительной схемы и интерферометра Майкельсона с электрическими входом, выходом и оптическим измерительным каналом. К электрическому выходу интерферометра Майкельсона подключена измерительная схема, выход которой является электрическим выходом бесконтактной измерительной головки, электрическим входом которой является электрический вход интерферометра Майкельсона. Линза связана с оптическим измерительным каналом интерферометра Майкельсона.
Это устройство предназначено для измерения перемещений в малом диапазоне и представляет собой конструкцию широко известного волоконного интерферометра белого света, контраст (видность) выходного оптического сигнала которого максимален при равенстве длин опорного и измерительного каналов /5/.
Такого типа интерферометры могут работать с зеркальными и с диффузными поверхностями /6/, на основе слабокогерентных источников света и многомодовой элементной базе /7, 8/.
Достоинствами данных способа- и устройства-прототипа являются более высокая скорость измерений и расширение фунциональных возможностей за счет работы с более шероховатыми объектами.
Однако основным недостатком этих способа и устройства является ограничение функциональных возможностей, определяемое одномерной диаграммой направленности, не позволяющее достичь размерности при координатных измерениях выше, чем 1-D ("ощупывание" детали только в направлении оси устройства).
Наиболее близким по технической сущности к предлагаемому изобретению является способ контроля оптического взаимодействия с объектом /9/ (способ-прототип), заключающийся в том, что направляют на объект когерентное излучение, после взаимодействия с объектом регистрируют это излучение интерференционным индикатором с акустооптическим преобразователем, выделяют компоненты выходного сигнала этого преобразователя с различными частотами, подают их на фотодиодный смеситель, по выходному сигналу которого определяют результаты взаимодействия с объектом, направляют и принимают указанное излучение посредством световодного преобразователя, между торцом которого и объектом создают зазор, значение которого включает пространственный интервал, соответствующий частотному перескоку выходного сигнала фотодиодного смесителя, который по цепи обратной связи подают на акустооптический модулятор.
Устройство, реализующее этот способ контроля (устройство-прототип), состоит из лазера, коллиматора, акустооптического модулятора, схемы ввода-вывода излучения для оптических световодов, световодного преобразователя, элементов оптической схемы интерферометра, фотоприемника и измерительной схемы.
Особенность данного способа контроля заключается в возможности создания виртуальной пространственно-чувствительной координаты и формирования импульсного электрического сигнала, который несет в себе информацию о пересечении поверхности объекта этой координаты - виртуальное "касание" измерительной головки и детали.
Эти способ и устройство обладают высоким быстродействием ≈1-5 мкс и точностью ≈0,1-0,5 мкм при формировании импульсного сигнала /4/.
Недостатками этих способа и устройства являются ограничение функциональных возможностей, определяемой как одномерной диаграммой направленности (вдоль оси световодного преобразователя), ограничивающей размерность головки до 1-D ("ощупывание" детали только в направлении оси световодного преобразователя), так и классом шероховатости поверхности контролируемых деталей Ra≤0, 4λ, где λ - длина волны света.
Предлагаемое изобретение направлено на достижение технического результата, который заключается
- в повышении точности координатных измерений за счет определения пространственных координат точки "виртуального касания" с объектом,
- повышении скорости координатных измерений за счет управления режимом ощупывания,
- в расширении функциональных возможностей за счет расширения диаграммы направленности и, соответственно, увеличения размерности до трехмерной (3D).
Согласно изобретению указанный результат достигается тем, что формируют оптическое излучение с заданными параметрами, модулируют излучение в выбранной плоскости, из модулированного излучения формируют опорный и измерительный потоки, последним с помощью световодного преобразователя освещают объект, принимают отраженную от объекта часть измерительного потока и создают одномерную диаграмму направленности, пространственно совмещают отраженный измерительный и опорный потоки, добиваются их интерференции, осуществляют фотоэлектрическое преобразование интерферирующих потоков в выходной электрический сигнал, по которому определяют результаты взаимодействия с объектом, дополнительно модулируют излучение в плоскости, перпендикулярной первой, расширяют диаграмму направленности за счет дополнительного излучения и приема измерительного потока в двух взаимно перпендикулярных направлениях относительно оси световодного преобразователя, создают трехмерную диаграмму направленности, по максимальному значению выходного электрического сигнала судят об экстремальном значении оптического взаимодействия с объектом.
Способ отличается также тем, что излучение модулируют за счет акустооптического преобразования в Брэгговском режиме.
Другое отличие способа состоит в том, что излучение модулируют зеркальным дефлектором.
Способ отличается также тем, что изменяют разность хода между опорным и измерительным потоками.
Соответственно устройство, осуществляющее предлагаемый способ, состоит из излучателя и последовательно установленных по ходу излучения коллиматора, модулятора с одними оптическим, электрическим входами и оптическим выходом, оптического приемного канала с двумя входами и одним выходом, световодного преобразователя со входом и выходом, фотоприемника, измерительной схемы, при этом выход оптического приемного канала связан со входом фотоприемника, электрический выход которого подключен ко входу измерительной схемы, оптический выход модулятора света связан со входом световодного преобразователя, выход которого связан со входом оптического приемного канала, в модуляторе света введен второй электрический вход, а в торце световодного преобразователя объединены его вход и выход, при этом между этим торцом и оптическим выходом модулятора света введен светоделитель, связывающий оптический выход модулятора света с другим входом оптического приемного канала, при этом на другом торце световодного преобразователя, направленного на объект, закреплена линза, причем в измерительной схеме сформирован электрический выход, который является электрическим выходом устройства.
Еще одним отличием устройства является то, что оптический приемный канал включает Y-образный световодный соединитель с опорным, измерительным и общим плечами, перед входами первых двух введено по линзе, которые являются входами оптического приемного канала, при этом в одно из этих двух плечей введен второй модулятор света с оптическими входом, выходом и электрическим входом, а выходом оптического приемного канала является общее плечо Y-образного световодного соединителя.
Другим отличием устройства является то, что линза световодного преобразователя выполнена в виде шарообразного диффузора.
Полученные новые свойства от данной совокупности признаков ранее не были известны и достигаются только в данном изобретении.
Описание изобретения поясняется чертежами.
На фиг. 1 представлена оптическая схема устройства, реализующего предлагаемый способ.
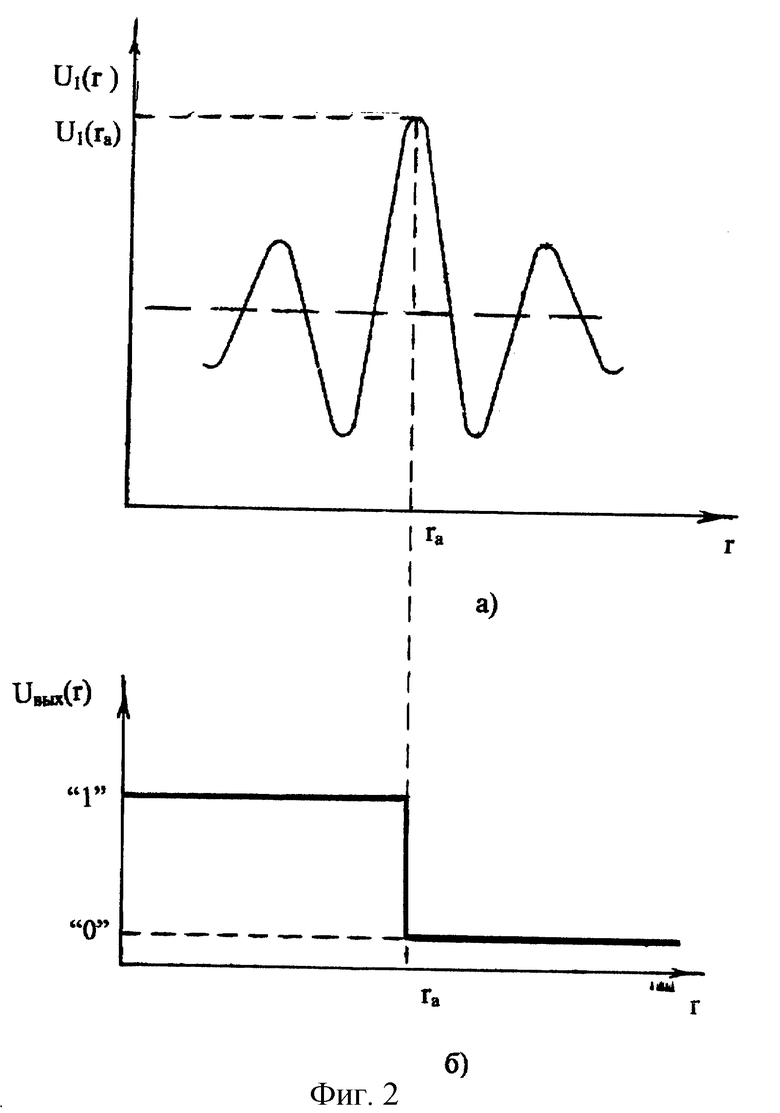
Фиг. 2, а и б, иллюстрирует сигналы на выходах фотоприемника U1(r) и измерительной схемы Uвых(r) вблизи нулевой разности хода измерительного и опорного потоков и поясняет образование "зонда когерентности".
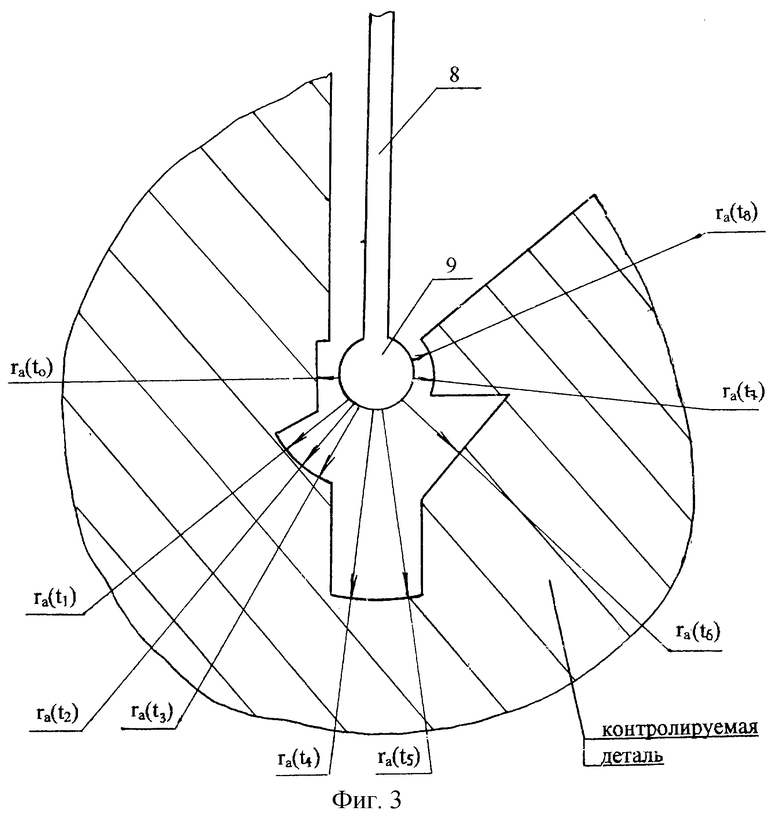
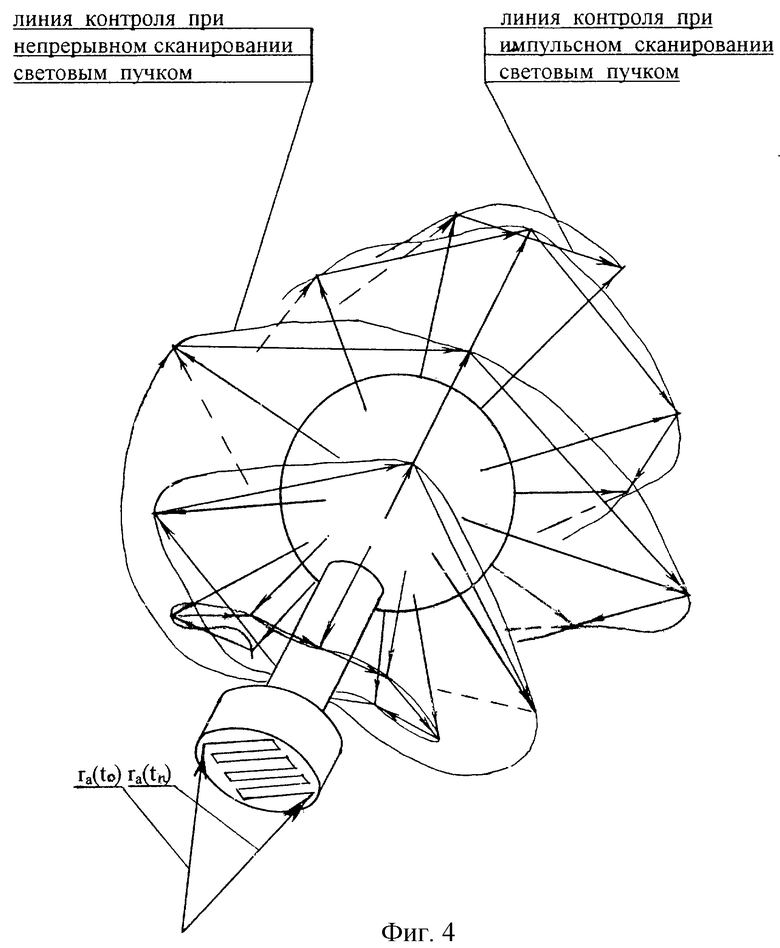
Фиг. 3 и 4 демонстрируют режимы ощупывания объекта при проведении координатных измерений.
Устройство, реализующее предлагаемый способ, содержит следующие элементы (фиг.1): излучатель 1, состоящий из генератора 2 и источника света 3, коллиматор 4, модулятор света (МС) 5, оптический приемный канал 6, светоделитель 7, световодный преобразователь 8, линза 9, фотоприемник 10, измерительная схема 11.
Оптический приемный канал 6 состоит из линз 6.1 и 6.4, Y-образного световодного соединителя 6.2, включающий опорное 6.3, измерительное 6.5 и общее 6.7 плечи. В измерительное плечо 6.5 оптического приемного канала 6 введен модулятор света (МС) 6.6.
Устройство (фиг. 1), реализующее предлагаемый способ контроля, работает следующим образом.
В излучателе 1 с помощью генератора 2 возбуждается источник света 3, формирующий оптический поток с длиной когерентности lког, который коллиматором 4 преобразуется в коллимированный пучок и направляется на оптический вход МС 5. На два электрических входа МС 5 подаются электрические сигналы Ux(t) и Uy(t), с помощью которых световой пучок на оптическом выходе МС 5 вращается вокруг осей OY и ОХ на соответствующий угол α (проекции этого угла αx и αy) тел. рад.
Изменения этих сигналов ΔUx(t) и ΔUy(t) приводят к угловым поворотам (его составляющие Δαx и Δαy) вокруг осей OY и ОХ
Δαx(t) = kxΔUx(t), (1)
Δαy(t) = kyΔUy(t), (2)
где kx и ky - коэффициенты пропорциональности.
Этот отклонившийся световой пучок проходит сквозь светоделитель 7, одна часть после которого следует по пути: светоделитель 7 --> линза 6.1 --> опорное плечо 6.3 --> общее плечо 6.7 --> фотоприемник 10. Этот пучок является оптическим опорным потоком.
Другая часть светового луча после светоделителя 7 освещает торец световодного преобразователя 8, проходит по нему, затем через линзу 9 следует на поверхность контролируемой детали. Часть отраженного от нее излучения проходит в линзу 9 и далее возвращается по пути: световодный преобразователь 8 --> светоделитель 7 --> линза 6.4 --> измерительное плечо 6.5 --> блок МС 6.6 --> общее плечо 6.7 --> фотоприемник 10. Этот пучок является оптическим измерительным потоком.
Таким образом, в общем плече 6.7 оптического приемного канала 6 опорный и измерительный оптические потоки пространственно совмещаются и интерферируют на входе фотоприемника 10. Интерференция этих потоков приводит к формированию на выходе фотоприемника 10 электрического сигнала U1(r) (фиг.2а), поступающий на вход измерительной схемы 11. Она выделяет максимальное значение U1(ra) и преобразовывает в логический перепад "1"-->"0" (или "0"-->"1") функции Uвых(r) (фиг.2б):
Uвых(r)~1(r-rа), (3)
где 1(r-rа) - функция логических выходных сигналов, аналогичная функции Хэвисайда, ra - координата, определяющая положение максимума функции U1(r) - положение "зонда когерентности".
Изменением разности хода (фазы) между опорным и измерительным оптическими потоками, вносимой блоком МС 6.6, осуществляется управляемое смещение "зонда когерентности". Такой режим ускоряет координатные измерения на КИМ изделий со сложными криволинейными поверхности. На фиг.3 представлен режим ощупывания такого объекта для различных значений Uупр(t): Uупр(t0)-->ra(t0), Uупр(t1)-->ra(t1)........ Uупр(t8)-->ra(t8).
Фиг.4 поясняет два режима контроля: непрерывный и импульсный. Непрерывное сканирование обеспечивается при линейном сканировании оптическим пучком модулятором 5. В зависимости от алгоритма ощупывания линия контроля - траектория, соединяющая ближайшие точки "виртуального касания" с поверхностью (от t0 до tn), похожа на криволинейную спираль.
При импульсном сканировании светом, в зависимости от алгоритма и заданной точности измерений, окружающее пространство осматривается пошагово при изменении пространственного угла на дискретный угловой квант δα. В этом случае, линия контроля состоит из последовательности точек (от t0 до tn) "виртуального касания" и имеет вид сложной ломаной линии.
Сущность предлагаемого способа заключается в следующем.
1. Для интерферометров на основе слабокогерентного излучателя со спектром излучения [λ1; λ2] длина когерентности lког определяется /4, 5/:
lког = (λo)2/(λ2-λ1), (4)
где λo, λ1, λ2, - значения средней, нижней и верхней длин волн спектра излучения. Для удобства измерений lког выбирается из условия lког≈(3-5)λo.
Режим работы таких интерферметров /4-8, 11, 12/ основан на некогерентном сложении оптических потоков: измерительного и опорного. При этом контраст (видность) интерференционного сигнала U1(r) (фиг.2а) достигает максимума при нулевой разности хода между этими потоками - на координате ra.
Это максимальное значение сигнала эквивалентно созданию на этой координате ra пространственно-чувствительного аналога бесконтактного "измерительного наконечника" - "зонда когерентности" /12/, а фиксация этого значения соответствует его "виртуальному касанию" с поверхностью объекта.
Режим некогерентного сложения оптических потоков позволяет устойчиво контролировать объекты не только с зеркальной (Ra≤λo/5), но и с шероховатой (Ra≥λo/5) поверхностями (где Ra - среднее арифметическое отклонение профиля поверхности) и использовать не только зеркальную, но и диффузную составляющие отраженного оптического потока /6/. Это позволяет снизить требования к перпендикулярности отражающей поверхности контролируемого объекта при измерениях.
2. Использованием световодного преобразователя с линзой на торце, направленном на объект, предлагается осуществить доставку излучения до контролируемой области детали и довести угол сканирования пространства в этой области до 2π тел. рад. Такая конструкция световодного преобразователя расширяет диаграмму направленности за счет дополнительного излучения и приема измерительного оптического потока в двух взаимно перпендикулярных направлениях относительно оси световодного преобразователя и создает трехмерную (3D) диаграмму направленности.
Сканирование с помощью модулятора света световым лучом приводит к эквивалентному сканированию "зондом когерентности" всего окружающего пространства вокруг линзы.
3. Введением разности хода (фазы) между опорным и измерительным оптическими потоками (в оптическом приемном канале) осуществляется управляемое смещение "зонда когерентности" rа(t). Также можно вводить коррекцию результатов измерений при изменениях оптических параметров устройства от воздействия внешних условий (температуры, влажности, давления). Синхронные движения "зонда когерентности" и луча света схожи с ощупыванием, определением положения поверхности.
При использовании в качестве модуляторов акустооптических дефлекторов могут быть получены следующие технические характеристики /13, 14/. Так в двумерном дефлекторе на основе РbМоO4 в диапазоне частот 100-175 МГц с временем переключения 1 мкс количество разрешимых состояний составило 32•32. Дефлектор типа ПД190 (СССР) для света с λ = 0,63 мкм обеспечивал пространственное разрешение 400•400 дискретных точек с центральной частотой f0=70 МГц, диапазоном изменения частоты Δf = 40 МГц и временем переключения от точки к точке ~12,5 мкс.
Одна из возможных конструкций модулятора на основе зеркального дефлектора /15/ представляет собой зеркало, закрепленное на пьезодефлекторе. Последний является дисковым биморфным пьезоэлементом, при этом проводящие обкладки элемента разделены на 4 одинаковых электрически изолированных сектора. При подаче напряжений разной полярности на противоположные секторы пьезоэлемент изгибается по соответствующей координате и наклоняет закрепленное на нем зеркало. Для этого модулятора угловая чувствительность достигла 1,5•10-6 рад/В.
Угловой поворот светового пучка с высокой разрешающей способностью и введение разности хода (фазы) использованием быстродействующих модуляторов позволяет реализовать алгоритмы поиска и контроля пространственного положения поверхности с сокращенным объемом перемещений механических инерционных частей КИМ. Это приводит к повышению как точности, так и скорости контроля.
К настоящему времени в области оптических модуляторов фазы имеется значительное число конструкций, годных для использования в предлагаемом способе /16, 17/.
Практическое изготовление световодного преобразователя с линзой может быть осуществлено разными путями. Первый вариант заключается в совместном использовании световодного преобразователя, выполненного например с использованием отдельных микролинз и цельной шарообразной линзы. При этом подбирают оптические параметры (спектральный диапазон [λ1; λ2], размеры микролинз и шарообразной линзы, их показатели преломления и т.д.), чтобы сформировать трехмерную диаграмму направленности.
Другой путь практического изготовления световодного преобразователя с линзой заключается в использовании волоконно- или интегрально-оптических средств для образования множества световодных каналов, похожей на "глаз". Подобные конструкции разрабатываются в качестве органов технического зрения в робототехнике /16/.
Практическое создание и использование шарообразных линз и диффузоров диаметром от 0,8 до 3 мм, обеспечивающих трехмерную диаграмму направленности, широко используется в медицине. В частности, широко применяются волоконно-оптические катетеры с шаровидными диффузорами для проведения эндоскопических и лапароскопических операций в урологии и гинекологии /18/.
Для предлагаемого способа и устройства ожидаемая точность контроля достигает значений 0,01-0,1 мкм, что превышает точность используемых контактных измерительных головок.
Источники информации
1. UK Patent 2049198, МПК G 01 В 7/03 Probe for use in measuring apparatus. Renishaw Electrical Limited (аналог).
2. Координатные измерительные машины и их применение /В.-А.А.Гапшис, А. Ю. Каспарайтис, М. Б. Модестов и др. - М. : Машиностроение, 1988, с. 80 (аналог).
3. R.C.Spooncer, C.Butler, B.E.Jones Optical fiber displacement sensors for process and manufacturing applications. Optical engineering, v.31, 8, pp. 1632-1637 (аналог).
4. Yuan L. White-light interferometric fiber-optic strain sensor from threepeak-wavelength broadband LED sourse. Applied Optics, 1997, v.36, 25, pp. 6246-6250 (аналог).
5. Бутиков Е.И. Оптика: Учеб.пособие для вузов. /Под ред. Н.И.Калитеевского. - М.: Высш.шк., 1986 г.
6. А.с. 1758421, МКИ G 01 В 11/24. Способ определения профиля поверхности диффузно отражающих объектов и устройство для его осуществления. Хопов В. В. Опубл. в Б.И. 32, 1992.
7. Галкин С.Л., Игнатьев А.В., Бабаджан А.И. Волоконно-оптический датчик линейных перемещений. Приборы и системы управления. 1992, 2, с.24.
8. Gerges A. S., Newson T.P., Jackson D.A. Coherence tuned fiber optic sensing system, with self-initialization, based on a multimode laser diode. Applied Optics, 1990, v.29, 30, pp. 4473-4479.
9. А.с. 1762117, МПК G 01 В 9/02. Способ контроля оптического взаимодействия с объектом. Телешевский В. И. , Леун Е.В. Опубл. в Б.И. 34, 1992 (прототип).
10. Леун Е.В. Исследование адаптивной волоконной измерительной головки для бесконтактного измерения отклонений размеров деталей на основе управляемой акустооптоэлектронной обратной связи.: Автореф.дис.канд.техн.наук: 05.11.16. - М.: Мосстанкин, 1994.
11. Т Li, A.Wang, К. Murphy, R.Claus White-light scanning fiber Michelson interferometer for absolute position-distance measurement. Optics Letters, 1995, v.20, 7, pp. 785-787.
12. Ларионов Ю.В., Раков А.В. Оптические методы контроля линейных размеров малых топологических элементов интегральных микросхем. Труды ИОФ РАН, т.49, 1995, с.130-162.
13. Балакший В.И., Парыгин В.Н., Чирков Л.Е. Физические основы акустооптики. М.: Радио и связь, 1985.
14. Магдич Л.Н., Молчанов В.Я. Акустооптические устройства и их применение. - М.: Сов.радио, 1978.
15. Якушкин С.В., Суханов И.И., Троицкий Ю.В. Измерение и стабилизация направления оси лазерного пучка. Приборы и техника эксперимента, 4, 1987, с. 181-183.
16. Световодные датчики /Красюк Б.А., Семенов О.Г., Шереметьев А.Г. и др. - М.: Машиностроение, 1990. - 256с.
17. Модуляционные эффекты в волоконных световодах и их применение. Гуляев Ю.В. Меш М.Я., Проклов В.В. - М.: Радио и связь, 1991, 152с.
18. Каталог многоразовых световодных инструментов для терапии. Институт прикладных проблем волоконной оптики при ИОФ РАН. 1999.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПТИЧЕСКОГО КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ИЗДЕЛИЙ | 2000 |
|
RU2235972C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ГРАНИЦЫ ОБЪЕКТА | 1999 |
|
RU2157964C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОТКЛОНЕНИЙ ОТ ПРЯМОЛИНЕЙНОСТИ | 2000 |
|
RU2175753C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАЗМЕРОВ ДЕТАЛЕЙ | 1999 |
|
RU2158416C1 |
| СПОСОБ КОНТРОЛЯ ПОЛОЖЕНИЯ ГРАНИЦЫ ДЕТАЛИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2157963C1 |
| Способ контроля оптического взаимодействия с объектом | 1990 |
|
SU1762117A1 |
| ОПТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ И ШЕРОХОВАТОСТИ ПОВЕРХНОСТИ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2223462C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ИНТЕРПОЛЯЦИИ ФАЗОВОГО СДВИГА В ЛАЗЕРНЫХ ИНТЕРФЕРОМЕТРАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2016380C1 |
| АКУСТООПТИЧЕСКОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ СМЕЩЕНИЙ | 2002 |
|
RU2213935C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ ПАРАМЕТРОВ ГРАНИЦЫ ОБЪЕКТА | 2000 |
|
RU2172470C1 |
Изобретение относится к измерительной технике, а именно к лазерной интерферометрии, и может быть использовано для контроля геометрических параметров объектов на КИМах в станко-, приборо- и машиностроении. Особенность предлагаемого способа контроля оптического взаимодействия с объектом заключается в активном трехмерном (размерность 3D) бесконтактном ощупывании контролируемого объекта в угловом секторе по 2π тел.рад. Управлением направлением контроля задается направление распространения светового луча и формируется пространственная траектория, линия контроля (при непрерывном сканировании световым лучом) или последовательности пространственных точек контроля (при импульсном сканировании световым лучом) при проведении координатных измерений. Использование предлагаемого способа контроля оптического взаимодействия с объектом позволит быстро и с высокой точностью контролировать сложнопрофильные объекты. 2 с. и 5 з.п. ф-лы, 4 ил.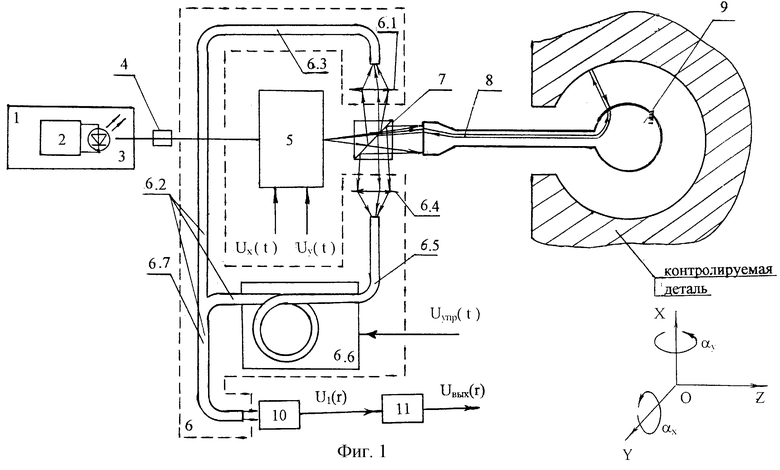
| Способ контроля оптического взаимодействия с объектом | 1990 |
|
SU1762117A1 |
| СПОСОБ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ МЕХАНИЧЕСКОГО СОСТОЯНИЯ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2126523C1 |
| RU 2055313 C1, 27.02.1996 | |||
| US 5418612 A, 23.05.1995. | |||

