Изобретение относится к области контроля и управления наземными транспортными средствами, преимущественно к контролю за транспортировкой грузов автомобилями до мест их назначения.
Известно, что при перевозке любых, особенно ценных, грузов наземными транспортными средствами на большие расстояния возникает проблема обеспечения безопасности грузоперевозок.
Известен способ контроля за транспортировкой грузов до мест их назначения по патенту Германии N 4214067, МПК G 08 G 1/127, публикация 4.11.93, основанный на сравнении фактического графика движения транспортного средства (по отрезкам пути и по прохождению контрольных точек) с расчетным. При выходе разностного значения между расчетными и фактическими значениями этого графика за заданные границы производят корректировку графика движения и его передачу в бортовой вычислитель транспортного средства.
Описанный способ не позволяет обеспечить требуемую безопасность грузоперевозок, поскольку не учитывает реальной ситуации на дороге и причин отклонения от заданного графика движения.
Наиболее близким аналогом к заявляемому техническому решению является способ контроля транспортных средств, изложенный в патенте PCT/US96/04509, МПК G 08 G 1/123, публикация от 10.10.96, основанный на задании координат подвижного транспортного средства, приеме транспортным средством навигационных сигналов от глобальной спутниковой системы радионавигации, выделении из принятых навигационных сигналов информации о текущих координатах подвижного транспортного средства, сравнении текущих координат подвижного транспортного средства с заданными координатами этого подвижного транспортного средства в пределах разрешенной области. При сравнении определяют, находится ли транспортное средство в пределах разрешенной области, и в случае выхода его за разрешенные пределы блокируют транспортное средство.
Описанный выше способ осуществляет автономный контроль за перемещением транспортного средства только в пределах определенной территории и не может обеспечить надежного контроля грузоперевозок с учетом складывающейся на дороге нештатной ситуации (возможное нападение на водителя, авария транспортного средства, необходимость оказания технической или медицинской помощи и других).
Задачей заявляемого изобретения является повышение надежности контроля за счет сокращения времени, необходимого для оказания помощи водителю при возникновении нештатных ситуаций в любой точке маршрута.
Поставленная задача решается тем, что в способе контроля за транспортировкой грузов, основанном на задании координат подвижного транспортного средства, приеме транспортным средством навигационных сигналов от глобальной спутниковой системы радионавигации, выделении из принятых навигационных сигналов информации о текущих координатах подвижного транспортного средства, сравнении текущих координат подвижного транспортного средства с заданными координатами этого подвижного транспортного средства, каждому подвижному транспортному средству задают номер и маршрут следования, информацию о текущих координатах каждого подвижного транспортного средства преобразуют в электрический сигнал для передачи по каналу сотовой системы связи, передают этот сигнал дискретно в реальном масштабе времени через систему сотовой связи в информационно-аналитический центр, где информацию принимают, производят ее обработку, хранение и отображение, а при возникновении нештатной ситуации отображают на электронной карте местности текущие и заданные координаты этого подвижного транспортного средства, при наличии сигнального сообщения отображают также смысловое содержание и время передачи сигнального сообщения от водителя, а также номер транспортного средства, на основе анализа полученной информации принимают решение об оперативной помощи водителю.
Представленный способ реализуют с помощью системы контроля за транспортировкой грузов.
На фиг. 1 представлена структурная схема системы контроля за транспортировкой грузов;
на фиг. 2 - пример реализации блока сопряжения 2;
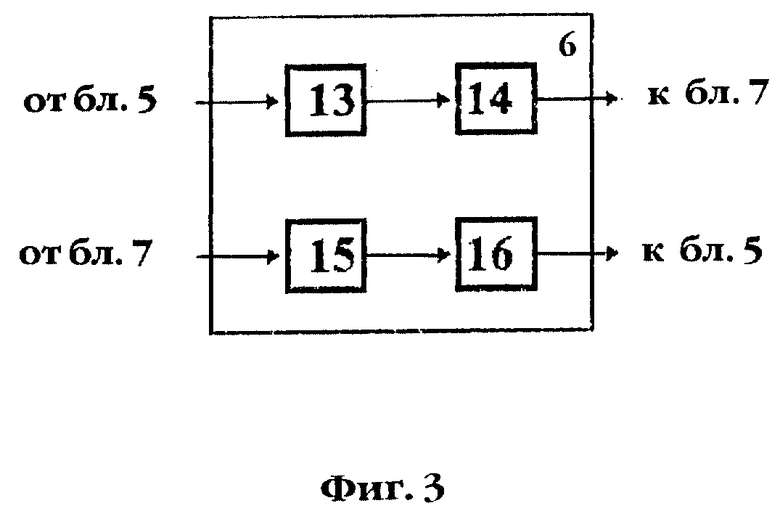
на фиг. 3 - пример реализации блока сопряжения 6;
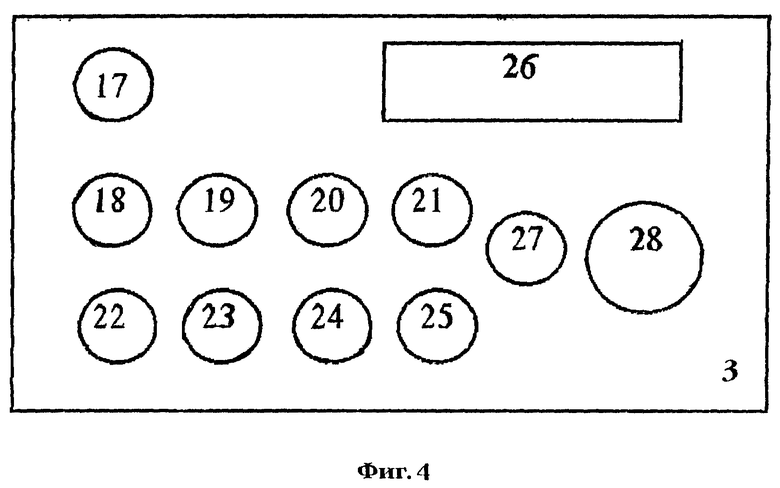
на фиг. 4 - пример реализации пульта сигнальных сообщений 3;
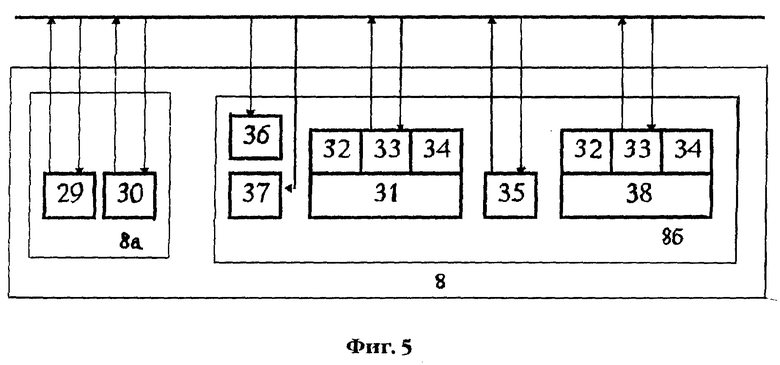
на фиг. 5 - пример организации блока 8 АРМ оператора и диспетчера;
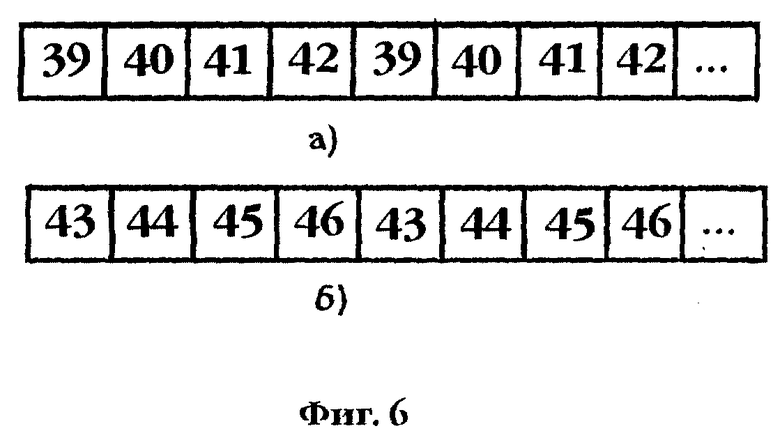
на фиг. 6 (а, б) - примеры структур навигационной информации и сигнального сообщения.
Система контроля за транспортировкой грузов (фиг. 1) включает в себя бортовую аппаратуру транспортного средства (БАТС), содержащую приемоизмеритель 1 радионавигационных систем "Глонас" или "GPS", устройство сопряжения с радиотелефоном 2, пульт сигнальных сообщений 3 и радиотелефон сотовой системы связи 4. Кроме того, система контроля за транспортировкой грузов содержит информационно-аналитический центр (ИАЦ), включающий в себя приемно-передающий пункт (ППП) 5, устройство сопряжения 6, вычислительный комплекс 7 и автоматизированное рабочее место (АРМ) 8, содержащее пульт оператора и пульт диспетчера правоохранительных органов.
В соответствии с фиг. 2, блок сопряжения 2 содержит последовательно соединенные мультиплексор 9, входы которого соединены с выходами блоков 1 и 3, и модем 10, выход которого является входом блока 4. Кроме того, он содержит последовательно соединенные модем 11 и демультиплексор 12, причем вход модема 11 является выходом блока 4, а выход демультиплексора 12 является входом блока 3.
В соответствии с фиг. 3, блок сопряжения 6 содержит последовательно соединенные модем 13 и демультиплексор 14, причем вход модема 13 является выходом блока 5, а выход демультиплексора 14 является входом блока 7. Кроме того, блок сопряжения 6 содержит последовательно соединенные мультиплексор 15 и модем 16, причем вход мультиплексора 15 является выходом блока 7, а выход модема 16 является входом блока 5.
В соответствии с фиг. 4, пульт сигнальных сообщений 3 содержит индикатор включения питания БАТС 17, кнопку 18 сигнала вызова диспетчера на речевую связь, кнопку 19 сигнала прекращения речевой связи с диспетчером, кнопки 20. . . 25 сигнальных сообщений, например, "Авария", "Вызов технической помощи", "Вызов медицинской помощи" и т.п., текстовой индикатор сообщения 26 из ИАЦ, кнопку 27 сигнала "Нападение", а также динамический громкоговоритель 28.
В соответствии с фиг. 5, блок 8 содержит автоматизированные рабочие места 8а и 8б оператора и диспетчера правоохранительных органов. Рабочее место оператора 8а содержит пульт управления вычислительным комплексом 29 и дисплей 30 оператора вычислительного комплекса. Рабочее место диспетчера правоохранительных органов 8б содержит дисплей 31 с отображением на электронной карте региона всех подвижных транспортных средств грузоперевозчика, отображение 32 даты передачи сигнального сообщения, отображение 33 текущего времени, отображение 34 содержания сигнальной информации и номера транспортного средства, радиотелефон 35, динамический громкоговоритель 36, магнитофон 37, дисплей 38 с отображением на электронной карте отдельного транспортного средства и прилегающей местности.
В соответствии с фиг. 6 (а), навигационная информация содержит стартовую посылку 39, признак навигационной информации 40, номер транспортного средства 41, содержание навигационной информации 42.
В соответствии с фиг. 6 (б), сигнальное сообщение содержит стартовую посылку 43, признак сигнального сообщения 44, номер транспортного средства 45, содержание передаваемого сигнального сообщения 46.
Приемоизмеритель 1 может быть реализован, например, в соответствии со структурными схемами, приведенными в книге: "Бортовые устройства спутниковой радионавигации", под ред. Шебшаевича B.С., Москва, Транспорт, 1988, стр. 88, рис. 35 и стр. 120, рис. 56.
Система, реализующая заявляемый способ, работает следующим образом.
При включении аппаратуры информационно-аналитический центр (ИАЦ) с автоматизированного рабочего места оператора 8а производит первичную установку параметров системы: каждому подвижному транспортному средству присваивают номер и маршрут следования и задают координаты этого наземного транспортного средства в соответствии с требуемым графиком движения. Информационно-аналитический центр работает в двух режимах: автоматическом режиме и режиме диспетчерского контроля (управления). В автоматическом режиме бортовая аппаратура транспортного средства с помощью приемоизмерителя 1 принимает сигналы от глобальной спутниковой системы радионавигации "Глонас" или "GPS" с информацией о текущих координатах этого подвижного транспортного средства, преобразует ее в блоке 2 сопряжения в электрический сигнал для передачи по каналу сотовой системы связи и передает этот сигнал от блока 4 дискретно в реальном масштабе времени через систему сотовой связи на вход блока 5 информационно-аналитического центра, преобразуют этот сигнал в блоке 6 в цифровую форму и передают его в вычислительный комплекс 7, где информацию принимают, производят ее обработку, хранение и отображение на экранах дисплеев 30 и 31 оператора и диспетчера.
При возникновении нештатной ситуации (например, при выходе отклонения текущих координат от заданных за допустимые значения или получении соответствующего сигнального сообщения от водителя) отображают на электронной карте 38 дисплея диспетчера текущие и заданные координаты этого транспортного средства, при наличии сигнального сообщения отображают также смысловое содержание и время передачи сигнального сообщения, поступающего с пульта 3 БАТС, а также номер транспортного средства. На основе анализа полученной информации диспетчер принимает решение, направленное на оказание оперативной помощи водителю и обеспечение сохранности транспортируемого груза.
При необходимости диспетчер может по радиотелефону 35 вызвать водителя на речевую связь, содержание переговоров фиксируется на магнитофоне 37. Если водителю необходима связь с диспетчером, то он включает кнопку 18 сигнала вызова диспетчера на речевую связь и после получения разрешения диспетчера разговаривает с ним. По окончании сеанса связи водитель нажимает кнопку 19 прекращения речевой связи с диспетчером.
Техническое преимущество заявляемого способа перед ближайшим аналогом заключается в повышении надежности и оперативности контроля за счет сокращения времени оказания помощи водителю при возникновении различных нештатных ситуаций.
Заявляемый способ позволяет одновременно контролировать большое количество подвижных транспортных средств, перевозящих ценные грузы, позволяет сосредоточить необходимые силы и средства для оказания, в случае необходимости, оперативной помощи водителям транспортных средств путем своевременной передачи информации правоохранительным органам.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ ЗА ТРАНСПОРТИРОВКОЙ ГРУЗОВ | 2001 |
|
RU2177647C1 |
| СПОСОБ КОНТРОЛЯ ЗА ТРАНСПОРТИРОВКОЙ ГРУЗОВ | 2004 |
|
RU2269821C1 |
| СПОСОБ КОНТРОЛЯ ЗА ТРАНСПОРТИРОВКОЙ ГРУЗОВ | 2010 |
|
RU2452996C1 |
| УСТРОЙСТВО ЗАЩИТЫ ТРАНСПОРТНОГО СРЕДСТВА ОТ УГОНА И КРАЖ | 2004 |
|
RU2264934C1 |
| СПОСОБ МОНИТОРИНГА, СОПРОВОЖДЕНИЯ И УПРАВЛЕНИЯ НАЗЕМНЫМИ ТРАНСПОРТНЫМИ СРЕДСТВАМИ | 2005 |
|
RU2288509C1 |
| СПОСОБ НАВИГАЦИОННОГО КОНТРОЛЯ И УПРАВЛЕНИЯ ПОДВИЖНЫМИ СРЕДСТВАМИ | 2014 |
|
RU2561644C1 |
| СПОСОБ ЦЕНТРАЛИЗОВАННОГО КОНТРОЛЯ СОСТОЯНИЯ И МЕСТОПОЛОЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2007 |
|
RU2348551C1 |
| СПОСОБ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2243594C2 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА МОНИТОРИНГА ПЕРЕВОЗОК ГРУЗОВ ЖЕЛЕЗНОДОРОЖНЫМ ТРАНСПОРТОМ | 2010 |
|
RU2466460C2 |
| Способ и система управления распределением заказов, перевозимых наземным транспортом | 2014 |
|
RU2639676C2 |

Изобретение относится к области контроля и управления транспортными средствами, преимущественно к контролю за транспортировкой грузов до места их назначения. Достигаемым техническим результатом изобретения является повышение надежности контроля за счет сокращения времени, необходимого для оказания помощи водителю при возникновении нештатных ситуаций в любой точке маршрута. Поставленная задача решается тем, что в способе контроля за транспортировкой грузов, основанном на задании координат подвижного транспортного средства, приеме транспортным средством навигационных сигналов от глобальной спутниковой системы радионавигации, выделении из принятых навигационных сигналов информации о текущих координатах подвижного транспортного средства, сравнении текущих координат подвижного транспортного средства с заданными координатами этого подвижного транспортного средства, каждому подвижному транспортному средству задают номер и маршрут следования, информацию о текущих координатах каждого подвижного транспортного средства преобразуют в электрический сигнал для передачи по каналу сотовой системы связи, передают этот сигнал дискретно в реальном масштабе времени через систему сотовой связи в информационно-аналитический центр, где информацию принимают, производят ее обработку, хранение и отображение, а при возникновении нештатной ситуации отображают на электронной карте местности текущие и заданные координаты этого подвижного транспортного средства, при наличии сигнального сообщения отображают также смысловое содержание и время передачи сигнального сообщения от водителя, а также номер транспортного средства, на основе анализа полученной информации принимают решение об оперативной помощи водителю. 6 ил.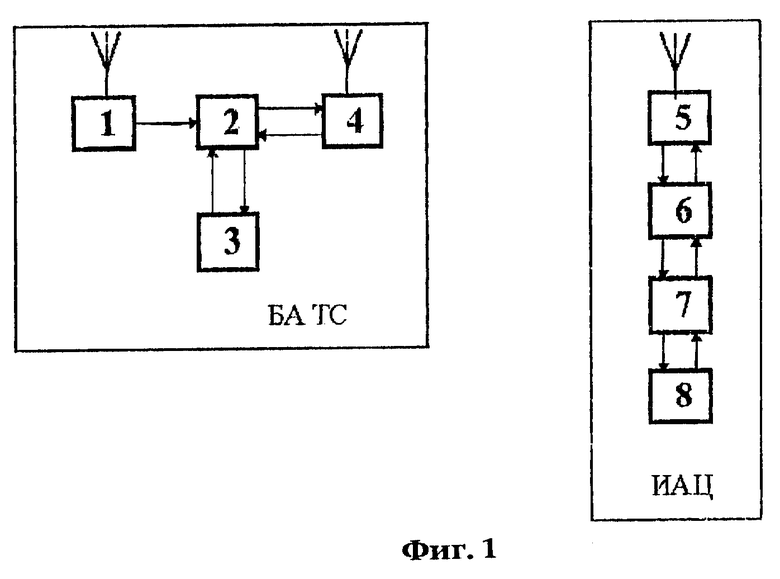
Способ контроля за транспортировкой грузов, основанный на задании координат подвижного транспортного средства, приеме транспортным средством навигационных сигналов от глобальной спутниковой системы радионавигации, выделении из принятых навигационных сигналов информации о текущих координатах подвижного транспортного средства, сравнении текущих координат подвижного транспортного средства с заданными координатами этого подвижного транспортного средства, отличающийся тем, что каждому подвижному транспортному средству задают номер и маршрут следования, информацию о текущих координатах каждого подвижного транспортного средства преобразуют в электрический сигнал для передачи по каналу сотовой системы связи, передают этот сигнал дискретно в реальном масштабе времени через систему сотовой связи в информационно-аналитический центр, где информацию принимают, производят ее обработку, хранение и отображение, а при возникновении нештатной ситуации отображают на электронной карте местности текущие и заданные координаты этого подвижного транспортного средства, при наличии сигнального сообщения отображают также смысловое содержание и время передачи сигнального сообщения от водителя, а также номер транспортного средства, на основе анализа полученной информации принимают решение об оперативной помощи водителю.
| Приспособление в пере для письма с целью увеличения на нем запаса чернил и уменьшения скорости их высыхания | 1917 |
|
SU96A1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ НАЗЕМНОГО ТРАНСПОРТА | 1995 |
|
RU2108626C1 |
| СОТОВАЯ СИСТЕМА СВЯЗИ | 1991 |
|
RU2100904C1 |
| RU 94013065 A1, 27.12.1996 | |||
| DE 4214067 A1, 04.01.1993. | |||
