Изобретение относится к способам мониторинга, сопровождения и управления наземными транспортными средствами (ТС), преимущественно автомобилями, и может быть использовано для централизованного контроля состояния и местоположения контролируемых ТС, дистанционного управления узлами и агрегатами ТС, а также для поиска ТС в нештатных ситуациях, например, в случаях кражи или угона ТС.
Известен способ мониторинга и контроля за ТС, осуществляющими транспортировку грузов, основанный на определении заданных координат ТС, при котором каждому контролируемому ТС задают номер и маршрут следования, приеме на ТС навигационных сигналов от глобальной спутниковой системы радионавигации (GPS), расчете на основе принятых навигационных сигналов информации о текущих координатах ТС, сравнении текущих координат ТС с заданными координатами этого ТС. Информацию о текущих координатах каждого контролируемого ТС преобразуют в электрический сигнал для передачи по стандартной сотовой сети подвижной связи, например, по GSM-сети, передают этот сигнал дискретно в реальном масштабе времени по стандартной сотовой сети подвижной связи в диспетчерский центр, где информацию принимают, производят ее обработку, хранение и отображение. При возникновении нештатной ситуации отображают на электронной карте местности текущие и заданные координаты контролируемого ТС, при получении сигнального сообщения от водителя ТС отображают также смысловое содержание и время передачи сигнального сообщения, а также заданный номер данного ТС. На основе анализа полученной информации принимают решение об оперативной помощи водителю (RU №2157565, G08G 1/123).
Недостатком указанного способа является потеря информации о местонахождении данного ТС при его попадании в зоны отсутствия радиовидимости, что приводит к искажению данных, задержкам и ошибкам в принятии решений. Из-за этого снижаются надежность и оперативность управления ТС.
Надежность и оперативность принятия решений по контролю и управлению ТС из диспетчерского центра повышаются при использовании другого известного способа сопровождения и управления ТС, при котором на контролируемом ТС принимают сигналы навигационных спутников GPS, определяют текущие координаты, время и скорость движения этого ТС, формируют пакет информации с включением в него дополнительного кода номера ТС и состояния отдельных подсистем ТС, преобразуют указанный пакет информации в сигнал для передачи в реальном масштабе времени по GSM-сети в диспетчерский центр, периодически передают указанную информацию с одного или нескольких контролируемых ТС, принимают эту информацию в диспетчерском центре, производят ее обработку, хранение и отображение на электронной карте местности, а при возникновении нештатной ситуации передают соответствующее сообщение в виде пакета информации на соответствующее контролируемое ТС через GSM-сеть, при приеме пакета информации на ТС включают/отключают отдельные подсистемы или устанавливают двухстороннюю речевую связь по GSM-сети, при этом определяют моменты перехода ТС из зоны/в зону радиовидимости GSM-сети и в промежуток времени между моментом выхода ТС из зоны радиовидимости и возвратом в зону радиовидимости на ТС запоминают и накапливают соответствующие пакеты информации, а при входе в зону радиовидимости накопленные пакеты информации передают в диспетчерский центр, где их обрабатывают и принимают решения по управлению ТС, причем при приеме пакета информации из диспетчерского центра на ТС перед расшифровкой содержащихся данных производят верификацию дополнительных символов "свой-чужой", а затем при совпадении символов расшифровывают данные пакета, при этом коды символов "свой-чужой" записывают в специально отведенной области формата передаваемого пакета информации. Определение же момента перехода ТС из зоны/в зону радиовидимости GSM-сети осуществляют путем сравнения уровня аналогового сигнала, преобразованного в цифровую форму, с заданным уровнем и при превышении первого над вторым фиксируют момент входа в зону радиовидимости, а при превышении второго над первым - момент выхода из зоны радиовидимости (RU №2217797, G08G 1/123).
Указанный способ обеспечивает более надежное и устойчивое сопровождение ТС, однако, не устраняет недостатки вышеупомянутого аналога, обусловленные жесткой привязкой к сотовой GSM-сети и к сигналам навигационных спутников GPS. Последние, как известно, уязвимы по отношению к преднамеренным помехам (например, указанным в рекламной информации израильской фирмы NetLine, серийно выпускающей малогабаритный помехопостановщик - джаммер C-Guard LP). Кроме того, системы, использующие сигналы GPS, плохо работают на узких городских улицах, в туннелях, в лесистой местности, то есть в условиях радиозатенения.
На устранение указанных недостатков направлено техническое решение по патенту RU №2288509, G08В 25/10, G08G 1/13, выбранное в качестве ближайшего аналога настоящего изобретения.
В указанном патенте описан способ мониторинга, сопровождения и управления наземными ТС, при котором на борту каждого контролируемого ТС принимают сигналы глобальной спутниковой системы радионавигации, например сигналы GPS, по содержащимся в них данным рассчитывают текущие навигационные параметры - координаты и скорость движения ТС, а также время по Гринвичу, посредством бортовых датчиков ТС определяют состояние его узлов и агрегатов и изменения этого состояния, а при заданных изменениях состояния формируют соответствующие извещения, путем дополнения извещений полями служебной информации преобразуют извещения в сообщения, в поля служебной информации которых записывают коды идентификационных признаков, текущих навигационных параметров и параметров, характеризующих состояния узлов и агрегатов ТС, переносят указанные сообщения на высокочастотные несущие и передают сигналы, несущие указанные сообщения, по радиоэфиру в диспетчерский центр, используя для этого бортовой терминал стандартной сотовой сети подвижной связи, например GSM-сети, и/или бортовой терминал специализированной ретрансляционно-радиопеленгационной сети, в диспетчерском центре принимают указанные сигналы сообщений, демодулируют и декодируют их, осуществляют первичную обработку сигналов и вторичную цифровую обработку информации с определением координат и построением траекторий движения ТС, отображают указанные траектории на фоне фрагментов электронной карты-схемы местности в сопровождении текстовой информации, анализируют полученные траектории и принимают решения, на основе которых формируют для контролируемых ТС командные сообщения, содержащие коды соответствующих команд, например код команды блокирования движения ТС, передают указанные командные сообщения по стандартной сотовой сети подвижной связи и/или по специализированной ретрансляционно-радиопеленгационной сети на борт контролируемого ТС, принимают указанные командные сообщения на борту контролируемого ТС, декодируют их, после чего воздействуют на соответствующие исполнительные органы, например на иммобилайзер, командами, коды которых содержатся в принятых командных сообщениях, - при этом с помощью базовых станций ретрансляционно-радиопеленгационной сети осуществляют радиослежение за излучением установленных на контролируемых ТС бортовых терминалов специализированной ретрансляционно-радиопеленгационной сети, для чего измеряют энергетические, частотные и временные параметры излучения с борта каждого контролируемого ТС, передают значения указанных параметров в диспетчерский центр, где определяют пеленг на источник излучения с данной базовой станции ретрансляционно-радиопеленгационной сети и используют полученные значения пеленгов с нескольких базовых станций ретрансляционно-радиопеленгационной сети для расчета текущего местоположения контролируемого ТС, осуществляют логическую обработку принятых сигналов, а результаты этой обработки используют при формировании передаваемых на борт соответствующих ТС команд по коммутации бортового терминала стандартной сотовой сети подвижной связи и/или бортового терминала специализированной ретрансляционно-радиопеленгационной сети, а также по регулированию параметров излучения бортового терминала специализированной ретрансляционно-радиопеленгационной сети, преобразуют эти команды в коды управления бортовым терминалом стандартной сотовой сети подвижной связи и/или бортовым терминалом специализированной ретрансляционно-радиопеленгационной сети и записывают эти коды управления в командные сообщения, транслируемые по стандартной сотовой сети подвижной связи и/или по специализированной ретрансляционно-радиопеленгационной сети на борт ТС, а после приема на борту ТС указанных командных сообщений и декодирования содержащихся в них кодов управления воздействуют кодами управления на бортовой терминал стандартной сотовой сети подвижной связи и/или на бортовой терминал специализированной ретрансляционно-радиопеленгационной сети, вызывая включение/выключение бортового терминала стандартной сотовой сети подвижной связи и/или бортового терминала специализированной ретрансляционно-радиопеленгационной сети, или увеличение/уменьшение мощности и продолжительности сеансов излучения бортового терминала специализированной ретрансляционно-радиопеленгационной сети.
Использование в рамках единой системы мониторинга нескольких сетей передачи данных, а также комплексирование различных методов измерения координат контролируемых ТС позволяет повысить помехоустойчивость и точность определения координат контролируемых ТС, благодаря чему улучшаются показатели эффективности управления ТС из диспетчерского центра.
Недостатком ближайшего аналога является сложность его практической реализации, обусловленная необходимостью развертывания на местности специализированной ретрансляционно-радиопеленгационной сети, что требует, например, согласования мест установки базовых станций и решения вопросов электромагнитной совместимости.
Предлагаемое техническое решение направлено на устранение указанного недостатка.
Предметом изобретения является способ радиопоиска, мониторинга и сопровождения угнанных транспортных средств (УТС), при котором на борту каждого ТС, обслуживаемого системой, реализующей данный способ, принимают сигналы глобальной спутниковой системы радионавигации, например, сигналы GPS, по содержащимся в них данным рассчитывают текущие навигационные параметры - координаты и скорость движения УТС, а также точное время, посредством установленных на борту УТС датчиков определяют состояние УТС, формируют соответствующие извещения, преобразуют их в информационные сообщения путем дополнения полями служебной информации, в которые записывают коды идентификационных признаков, текущих навигационных параметров и параметров, характеризующих состояния узлов и агрегатов УТС, переносят информационные сообщения на высокочастотные несущие и передают сигналы, несущие указанные информационные сообщения, по радиоэфиру, используя для этого объектовый терминал стандартной сотовой сети подвижной связи, например, GSM-сети, и/или объектовый приемопередатчик ретрансляционного канала, в диспетчерском центре принимают сигналы, несущие информационные сообщения, демодулируют и декодируют их, осуществляют первичную обработку сигналов и вторичную обработку цифровой информации с определением координат и построением траекторий движения УТС, отображают указанные траектории на фоне фрагментов электронной карты-схемы местности в сопровождении текстовой информации, анализируют полученные траектории и принимают решения, на основе которых формируют для УТС командные сообщения, содержащие коды соответствующих команд, например код команды блокирования движения УТС, передают командные сообщения по стандартной сотовой сети подвижной связи и/или по ретрансляционному каналу, принимают командные сообщения на борту УТС, декодируют их и воздействуют на соответствующие исполнительные органы, например на иммобилайзер, - при этом передачу сигналов с информационными сообщениями по ретрансляционному каналу от УТС к диспетчерскому центру дополнительно осуществляют с помощью приемопередатчиков ретрансляционного канала, установленных на других контролируемых объектах - ТС и объектах недвижимости, находящихся в зоне действия объектового приемопередатчика ретрансляционного канала, при этом после приема на указанных контролируемых объектах сигналов с информационными сообщениями демодулируют принятые сигналы и переносят содержащиеся в них информационные сообщения на несущие частоты стандартной сотовой сети подвижной связи, например GSM-сети, и излучают их в эфир.
Частными существенными признаками изобретения являются следующие.
Передачу сообщений в каждом ретрансляционном канале осуществляют посредством хоппинг-сигналов.
Определение текущих координат УТС в диспетчерском центре осуществляют по измеренным навигационным параметрам УТС.
Определение текущих координат УТС осуществляют по измеренным расстояниям между УТС, пославшим информационное сообщение, и контролируемыми объектами - ТС и объектами недвижимости, ретранслировавшими информационное сообщение, а также по расстояниям между контролируемыми объектами, ретранслировавшими указанное сообщение.
Расстояния между УТС, пославшим информационное сообщение, и контролируемыми объектами, ретранслировавшими информационное сообщение, а также расстояния между контролируемыми объектами, ретранслировавшими информационное сообщение, определяют по результатам измерения уровней сигналов, принимаемых на контролируемых объектах.
Расстояния между УТС, пославшим информационное сообщение, и контролируемыми объектами, ретранслировавшими информационное сообщение, а также расстояния между контролируемыми объектами, ретранслировавшими информационное сообщение, определяют по результатам измерения разностей времен прихода сигналов, принимаемых на контролируемых объектах.
Задачей настоящего изобретения является создание технологии радиопоиска, мониторинга и сопровождения УТС, которая позволила бы упростить техническую реализацию и, соответственно, снизить финансовые затраты, связанные с созданием и эксплуатацией систем, обеспечивающих радиопоиск, мониторинг и сопровождение УТС.
Обеспечиваемый технический результат заключается в использовании в качестве носителей ретрансляционной аппаратуры других контролируемых объектов (ТС и объектов недвижимости), что позволяет осуществлять обмен информацией между УТС и диспетчерским центром без установки на местности базовых станций.
Сущность изобретения поясняется на фиг.1-3.
На фиг.1 представлена общая структурная схема системы, реализующей заявленный способ.
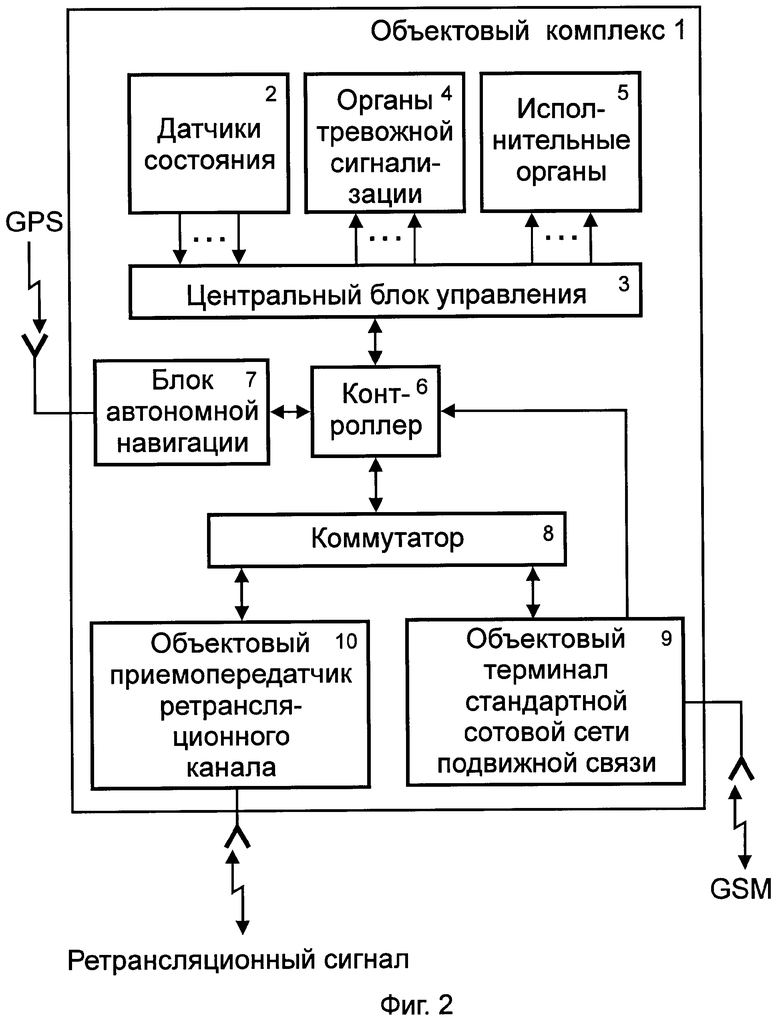
На фиг.2 показан пример построения охранного комплекса, устанавливаемого на контролируемых объектах.
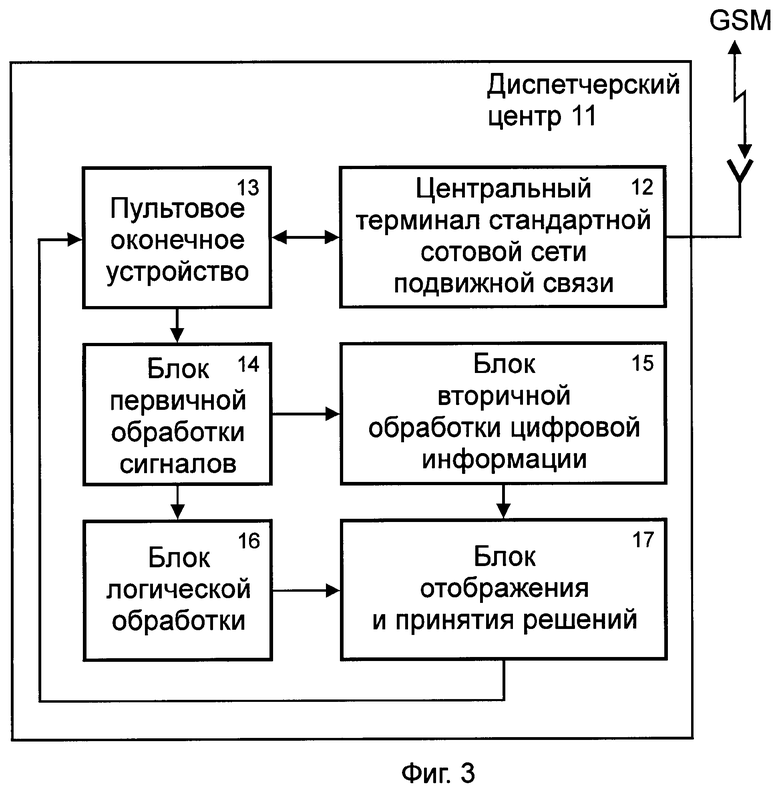
На фиг.3 представлен пример возможного построения диспетчерского центра.
На фиг.1-3 использованы следующие обозначения: 1 - объектовый комплекс; 2 - датчики состояния; 3 - центральный блок управления; 4 - органы тревожной сигнализации; 5 - исполнительные органы; 6 - контроллер; 7 - блок автономной навигации; 8 - коммутатор; 9 - объектовый терминал стандартной сотовой сети подвижной связи; 10 - объектовый приемопередатчик ретрансляционного канала; 11 - диспетчерский центр; 12 - центральный терминал стандартной сотовой сети подвижной связи; 13 - пультовое оконечное устройство; 14 - блок первичной обработки сигналов; 15 - блок вторичной обработки цифровой информации; 16 - блок логической обработки; 17 - блок отображения и принятия решений.
Система, реализующая рассматриваемый способ радиопоиска, мониторинга и сопровождения УТС, содержит (фиг.1) объектовый комплекс 1, установленный на каждом контролируемом этой системой объекте, и диспетчерский центр 11, общий для всех контролируемых этой системой объектов.
Объектовый комплекс 1 содержит (фиг.2) датчики 2 состояния, выходы которых подключены к соответствующим входам центрального блока 3 управления, органы 4 тревожной сигнализации и исполнительные органы 5, входы которых подключены к соответствующим выходам центрального блока 3 управления. В состав рассматриваемой системы входит также контроллер 6, связанный своими первыми входом и выходом с соответствующими выходом и входом центрального блока 3 управления. Вторые вход и выход контроллера 6 подключены, соответственно, к выходу и входу блока 7 автономной навигации, а третьи вход и выход - соответственно, к первым выходу и входу коммутатора 8. Вторые вход и выход коммутатора 8 которого подключены, соответственно, к выходу и входу объектового терминала 9 стандартной сотовой сети подвижной связи, управляющий выход которого подключен к дополнительному входу контроллера 6. Третьи вход и выход коммутатора 8 подключены, соответственно, к выходу и входу объектового приемопередатчика 10 ретрансляционного канала.
Диспетчерский центр 11 содержит (фиг.3) последовательно соединенные пультовое оконечное устройство 13, блок 14 первичной обработки сигналов, блок 15 вторичной обработки цифровой информации и блок 17 отображения и принятия решений. В состав диспетчерского центра 11 входят также центральный терминал 12 стандартной сотовой сети подвижной связи, связанный с пультовым оконечным устройством 13, и блок 16 логической обработки, вход которого подключен ко второму выходу блока 14 первичной обработки сигналов, а выход - ко второму входу блока 17 отображения и принятия решений. При этом выход блока 17 отображения и принятия решений подключен к управляющему входу пультового оконечного устройства 13. Блок 17 отображения и принятия решений работает под управлением оператора диспетчерского центра 11, имеющего возможность визуально оценивать информацию, отображаемую на мониторе и на других индикаторных устройствах блока 17 отображения и принятия решений.
Датчиками 2 состояния могут быть любые контрольно-измерительные преобразователи, позволяющие определять состояния различных узлов и агрегатов ТС и изменения указанных состояний. Датчиками 2 состояния, устанавливаемыми на ТС, могут быть, в частности, датчик удара, датчик объема и концевые выключатели.
В качестве органов 4 тревожной сигнализации могут использоваться звуковые сигнализаторы (сирены), световые сигнализаторы (фары, сигнальные лампы, светодиоды), а также радиоканальные устройства, например, радиопейджеры. В качестве исполнительных органов 5 могут применяться различные виды иммобилайзеров и противоугонных блоков, например управляемые реле. Все вышеупомянутые устройства широко представлены в номенклатуре серийной продукции предприятия-заявителя ("Автомобильные охранные системы", ООО "АЛЬТОНИКА", каталог 2005, вып. №8, с.8-12).
Объектовый терминал 9 стандартной сотовой сети подвижной связи входит в состав серийных информационно-охранных систем REEF GSM моделей 1000 и 2000 ("Автомобильные охранные системы", ООО "АЛЬТОНИКА", каталог 2005, вып. №8, с.20, 21), а блок 7 автономной навигации является одной из составных частей серийных спутниковых информационно-поисковых систем REEF GSM модели 3000 ("Автомобильные охранные системы", ООО "АЛЬТОНИКА", каталог 2005, вып. №8, с.22-24).
Центральный блок 3 управления и контроллер 6 являются составными частями всех вышеупомянутых изделий, серийно выпускаемых предприятием-заявителем.
В качестве коммутатора 8 может быть использован, например, серийно выпускаемый микропроцессорный матричный коммутатор MegaPower 48+ (www.armosystems.ru).
В качестве объектового приемопередатчика 10 ретрансляционного канала может быть использована приемопередающая аппаратура специализированной ретрансляционно-радиопеленгационной системы мониторинга КАРНЕТ-3, обеспечивающая большую дальность действия и высокую помехоустойчивость указанной системы. Это достигается, благодаря тому, что передачу и прием сообщений в каждом ретрансляционном канале осуществляют посредством сигнала с прыгающими частотами, так называемого хоппинг-сигнала. Указанное техническое решение защищено, например, патентами RU №2220859, В60R 25/00, G08В 25/00, RU №2228860, В60R 25/00, G08В 25/10, RU №2244642, В60R 25/00.
Все представленные на фиг.3 функциональные узлы диспетчерского центра 11 (за исключением блока 16 логической обработки) входят в состав радиоканальной системы мониторинга и сопровождения ТС по патенту RU №2240938, В60R 25/00, G08B 25/10.
Возможный вариант реализации блока 16 логической обработки, основанной на пороговой обработке принимаемых сигналов, описан в вышеупомянутом способе-аналоге по патенту RU №2217797, G08G 1/123.
Таким образом, все представленные на фиг.1-3 функциональные узлы известны и выпускаются серийно. Поэтому возможность практической реализации предлагаемого технического решения не вызывает сомнений.
Показанная на фиг.1-3 система, реализующая рассматриваемый способ радиопоиска, мониторинга и сопровождения УТС, работает следующим образом.
При попытках угона, кражи или любых других видах несанкционированного воздействия на обслуживаемое системой ТС в его объектовом комплексе 1 срабатывают датчики 2 состояния. Формируемые ими тревожные извещения поступают в центральный блок 3 управления, который активирует органы 4 тревожной сигнализации, например сирену, фары и/или радиопейджер, и исполнительные органы 5, например устройство, блокирующее работу двигателя. Допустим, что несмотря на принятые защитные меры, злоумышленникам все-таки удалось привести ТС в движение и осуществить угон. В этом случае ТС становится УТС, и формирование информационного сообщения для передачи в эфир происходит следующим образом.
Центральный блок 3 управления дополняет тревожное извещение, полученное от датчиков 2 состояния соответствующими полями служебной информации, и формирует информационное сообщение, частью которого является исходное тревожное извещение. При этом в соответствующие поля указанного информационного сообщения включаются хранящиеся в центральном блоке 3 управления коды идентификационных признаков УТС (государственный номер, марка, цвет, данные о владельце и другие данные) и коды параметров состояния УТС, которые в простейшем случае определяются в центральном блоке 3 управления по номеру датчика 2 состояния, от которого пришло исходное извещение. Сформированное таким образом информационное сообщение из центрального блока 3 управления пересылается в контроллер 6, который запрашивает из блока 7 автономной навигации навигационные параметры (текущие координаты и скорость движения контролируемого объекта). По указанному запросу входящий в состав блока 7 автономной навигации GPS-приемник измеряет указанные навигационные параметры и передает их в контроллер 6. Получив из блока 7 автономной навигации навигационные параметры, контроллер 6 заносит их в соответствующие поля информационного сообщения и через коммутатор 8 передает сформированное таким образом информационное сообщение в одно из устройств, обеспечивающих его передачу в радиоэфир: в объектовый терминал 9 стандартной сотовой сети подвижной связи или в объектовый приемопередатчик 10 ретрансляционного канала.
То, какое из указанных устройств будет использовано для передачи информационного сообщения в эфир, определяется помеховой обстановкой в районе нахождения контролируемого объекта, которая анализируется объектовым терминалом 9 стандартной сотовой сети подвижной связи. Если последний не фиксирует превышения заданного допустимого уровня помехи, то он посылает в контроллер 6 команду на подключение коммутатором 8 к выходу контроллера 6 объектового терминала 9 стандартной сотовой сети подвижной связи. В этом случае передача информации в диспетчерский центр 11 осуществляется по стандартной сотовой сети подвижной связи, например, по GSM-сети. Для этого передаваемое сообщение переносится на высокочастотную несущую стандартной сотовой сети подвижной связи, например, 900/1800 МГц и в формате этой стандартной сотовой сети подвижной связи (например, в GSM-формате) излучается в эфир.
Если же фиксируется превышение помехой допустимого порогового уровня, то это может свидетельствовать о применении злоумышленниками джаммера. В этом случае объектовый терминал 9 стандартной сотовой сети подвижной связи посылает в контроллер 6 команду на подключение коммутатором 8 к выходу контроллера 6 объектового приемопередатчика 10 ретрансляционного канала. Объектовый терминал 9 стандартной сотовой сети подвижной связи продолжает при этом анализировать помеховую обстановку в районе местонахождения УТС.
В объектовом приемопередатчике 10 ретрансляционного канала пришедшее сообщение переносится на высокочастотную несущую, преобразуется в формат, необходимый для передачи по данному ретрансляционному каналу, и излучается в эфир.
В отличие от ближайшего аналога, в рассматриваемой системе ретрансляционный канал не содержит территориально распределенных на местности базовых станций, чем собственно, и определяется простота технической реализации предлагаемого способа. Роль базовых станций играют объектовые комплексы 1, которые могут быть размещены на контролируемых объектах (на других ТС и/или на объектах недвижимости). Чем больше таких контролируемых объектов будет оснащено объектовыми комплексами 1, тем выше будет плотность сформированной на их основе ретрансляционной сети и, соответственно, более надежно будет осуществляться обмен данными между УТС и диспетчерским центром 11. Поскольку часть таких ретрансляторов может находиться на движущихся ТС, указанная ретрансляционная сеть постоянно меняет свою конфигурацию. В процессе этого движения часть контролируемых объектов может терять способность быть ретрансляторами, выходя из зоны действия объектового комплекса 1, установленного на УТС, а другая часть, наоборот, получать такую возможность.
После того, как сообщение, излученное объектовым приемопередатчиком 10 ретрансляционного канала, установленным на УТС, принимается объектовым приемопередатчиком 10 ретрансляционного канала, размещенным, к примеру, на другом контролируемом ТС, через коммутатор 8 это сообщение передается в контроллер 6. Получив указанное сообщение, контроллер 6 запрашивает в центральном блоке 3 управления идентификационные параметры контролируемого объекта, играющего роль ретранслятора, а в блоке 7 автономной навигации - текущие навигационные параметры этого ретранслятора. Получив из указанных блоков данные параметры, контроллер 6 заносит их в соответствующие поля ретрансляционного сообщения в качестве признака ретрансляции. После этого контроллер 6 переключает коммутатор 8 и через него передает ретрансляционное сообщение в объектовый терминал 9 стандартной сотовой сети подвижной связи. В объектовом терминале 9 стандартной сотовой сети подвижной связи указанное ретрансляционное сообщение переносится на высокочастотную несущую, преобразуется в формат используемой стандартной сотовой сети подвижной связи (в рассматриваемом примере - GSM-сети) и излучается в эфир.
В зоне действия объектового приемопередатчика 10 ретрансляционного канала, установленного на УТС, могут одновременно находиться несколько контролируемых объектов, оснащенных объектовыми комплексами 1. Соответственно, каждый из них может выполнить роль ретранслятора, обеспечивающего ретрансляцию ретрансляционного сигнала с борта контролируемого УТС в диспетчерский центр 11. Меры по недопущению перегрузки диспетчерского центра 11 избыточными ретрансляционными сигналами рассмотрены ниже.
Принятый в диспетчерском центре 11 (фиг.3) ретрансляционный сигнал поступает в центральный терминал 12 стандартной сотовой сети подвижной связи, где он демодулируется и передается на первый вход пультового оконечного устройства 13. Пультовое оконечное устройство 13 преобразует поступивший сигнал к виду, необходимому для его предварительной обработки в блоке 14 первичной обработки сигналов. В блоке 14 первичной обработки сигналов принятый сигнал преобразуется в цифровой вид и декодируется. Из содержащегося в нем информационного сообщения выделяется информация, введенная в исходное информационное сообщение на борту УТС, и информация, включенная в информационное сообщение в объектовом комплексе 1, использованном в качестве ретранслятора.
Далее, та часть информационного сообщения, которая содержалась в исходном информационном сообщении с борта УТС, подается на вход блока 15 вторичной обработки цифровой информации, обеспечивающего сопровождение УТС. А та часть информационного сообщения, которая была присоединена к исходному информационному сообщению в объектовых комплексах 1, ретранслировавших указанное информационное сообщение, передается для анализа в блок 16 логической обработки. Эта часть информационного сообщения, в частности, содержит информацию об уровнях и временных задержках ретрансляционных сигналов, необходимую для рассматриваемого ниже измерения дальностей.
В GSM-сети сообщения, содержащие коды идентификационных признаков, навигационных параметров и параметров состояния УТС, передаются, как правило, в виде SMS-сообщений. Может также использоваться режим GPRS.
В блоке 15 вторичной обработки цифровой информации навигационные параметры УТС обрабатываются в соответствии с известными алгоритмами автосопровождения, используемыми, например, в радиолокации ("Справочник по радиолокации". / Под ред. М.Сколника, М., "Советское Радио", 1978, гл. 1). Полученные обработанные цифровые данные, описывающие траекторию движения УТС, поступают в блок 17 отображения и принятия решений.
В блоке 17 отображения и принятия решений, в соответствии с полученными кодами идентификационных признаков, формируется запрос на вызов хранящихся в памяти блока 17 отображения и принятия решений текстовых данных о контролируемых объектах. Дополнительно в том же блоке 17 отображения и принятия решений, в соответствии с полученными кодами навигационных параметров, формируется запрос на вызов хранящихся в памяти блока 17 отображения и принятия решений фрагментов карты-схемы местности, соответствующих переданным навигационным параметрам. При этом в качестве фрагментов карты-схемы местности, как правило, используются фрагменты цифровой модели улично-дорожной сети.
Вызванная запросами информация преобразуется в формат двумерного изображения и отображается на мониторе блока 17 отображения и принятия решений. Отображение движения УТС осуществляется в виде траектории перемещения условной отметки УТС на фоне соответствующего фрагмента карты-схемы местности. По мере необходимости на экран монитора может выводиться также текстовая информация (например, цвет, государственный номер и марка УТС, его географические координаты, данные о владельце и другая информация).
Коды уровня сигнала, принятого различными объектовыми комплексами 1, ретранслировавшими сигналы, сравниваются в блоке 16 логической обработки с заданным пороговым уровнем, значение которого заранее записывается в память блока 16 логической обработки. Если уровень каждого из сигналов, принимаемых различными объектовыми комплексами 1, использованными как ретрансляторы, становится меньше заданного порога, то блок 16 логической обработки формирует специальное предупреждение оператору диспетчерского центра 11. Это предупреждение свидетельствует о том, что данный контролируемый объект находится вне зоны действия объектового приемопередатчика 10 ретрансляционного канала УТС. Указанное предупреждение фиксируется на мониторе (индикаторе), входящем в состав блока 17 отображения и принятия решений.
Система, реализующая рассматриваемый способ, может одновременно сопровождать несколько УТС. Сопровождение осуществляется под визуальным контролем оператора диспетчерского центра 11, который может вручную изменять параметры сопровождения (период обновления данных, коэффициенты сглаживания траектории и другие параметры).
Поскольку ТС, как правило, двигаются по улично-дорожной сети, наличие перед глазами оператора диспетчерского центра 11 фрагментов карты-схемы улично-дорожной сети дает ему определенный запас времени для принятия решения. Кроме того, оператору диспетчерского центра 11 легче прогнозировать место наиболее вероятного нахождения УТС в периоды, когда ни одно из контролируемых системой ТС не попадает в зону действия установленного на УТС объектового приемопередатчика 10 ретрансляционного канала.
Решения навигационных уравнений в блоке 7 автономной навигации производятся с частотой получения спутниковых радионавигационных данных, как правило, дважды в секунду. Если координаты УТС определяются по данным GPS-приемника, входящего в состав блока 7 автономной навигации, то область нахождения УТС (микросота) отображается в виде круга, центр которого находится в точке с координатами, определенными в блоке 7 автономной навигации, а значение радиуса определяется ошибкой GPS-приемника.
При движении УТС по дороге местоположение данного круга на карте-схеме смещается в соответствии с показаниями GPS-приемника, а размеры области пересечения указанного круга с дорогой определяют оценку ошибок измерений местоположения УТС.
Важную информацию для повышения точности определения местонахождения УТС и его устойчивого сопровождения дает использование в блоке 17 отображения и принятия решений цифровой модели улично-дорожной сети в виде набора линейных сегментов и узлов. Также повышает точность определения местонахождения контролируемого ТС применение при обработке навигационных данных в блоке 15 вторичной обработки цифровой информации оптимальной, например, калмановской фильтрации, как это описано, например, в патентной заявке US №2002/0193944, G01C 21/26.
Совокупность навигационных данных, получаемых из объектовых комплексов 1, и цифровой модели улично-дорожной сети позволяет достаточно точно определять текущие координаты УТС и осуществлять его устойчивое сопровождение с целью дальнейшего перехвата силами быстрого реагирования.
В процессе перехвата УТС силами быстрого реагирования диспетчерский центр 11 может формировать и передавать на УТС командные сообщения.
При наличии связи УТС с диспетчерским центром 11 по GSM-сети информационные сообщения от УТС поступали в диспетчерский центр 11 без служебного признака использования при передаче ретрансляционного канала. Это означает, что коммутатор 8, входящий в состав объектового комплекса 1 на УТС включен в положение, связывающее контроллер 6 с объектовым терминалом 9 стандартной сотовой сети подвижной связи. Поэтому диспетчерский центр 11 должен передавать командное сообщение непосредственно на УТС по GSM-сети. Это командное сообщение поступает в объектовый терминал 9 стандартной сотовой сети подвижной связи и через открытый для этого блока коммутатор 8 передается на контроллер 6. Как правило, контроллер 6 передает командное сообщение в центральный блок 3 управления, который формирует соответствующее воздействие на исполнительные органы 5 и/или на органы 4 тревожной сигнализации.
Содержанием командного сообщения в данном случае может быть команда блокирования движения УТС, например, посредством включения иммобилайзера.
Другим примером командного сообщения может быть команда принудительного переключения объектового комплекса 1 в режим использования ретрансляционного канала. Необходимость в такой команде возникает в том случае, когда злоумышленники прервали поступление на УТС сигналов GPS. В этом случае сигналы, поступающие в диспетчерский центр 11 по GSM-сети, не содержат объективной информации о координатах УТС. Необходимые координаты можно получить только от ближайших к УТС контролируемых объектов. Поэтому в УТС необходимо провести включение ретрансляционного канала. Рассматриваемая команда поступает в УТС по GSM-сети на объектовый терминал 9 стандартной сотовой сети подвижной связи и через коммутатор 8 передается в контроллер 6. Данная команда выполняется непосредственно контроллером 6 без трансляции ее в центральный блок 3 управления. Контроллер 8 переключает коммутатор 8 в состояние, закрывающее связь контроллера 6 с объектовым терминалом 9 стандартной сотовой сети подвижной связи и включающее связь контроллера 6 с объектовым приемопередатчиком 10 ретрансляционного канала.
При отсутствии связи УТС с диспетчерским центром 11 (определяемой в диспетчерском центре 11 по наличию признака ретрансляции в информационных сообщениях УТС) командные сообщения передаются диспетчерским центром 11 на один из контролируемых объектов, которым в данном случае может быть, например, одно из ТС сил быстрого реагирования. Этот контролируемый объект переводит командное сообщение к виду, передаваемому по ретрансляционному каналу, передает его, а затем снова переключается в режим приема командных сообщений по GSM-сети. По ретрансляционному каналу командное сообщение поступает в УТС - на объектовый приемопередатчик 10 ретрансляционного канала. Через коммутатор 8 и контроллер 6 командное сообщение передается в центральный блок 3 управления, который вырабатывает соответствующее полученной команде воздействие на исполнительные органы 5 и/или на органы 4 тревожной сигнализации.
Важным вопросом является минимизация финансовых затрат на оплату SMS-сообщений, посылаемых с контролируемых объектов, используемых как ретрансляторы. Она может быть осуществлена следующим образом.
При нахождении в зоне действия объектового комплекса 1, установленного на УТС, избыточного количества других контролируемых объектов, способных ретранслировать информационное сообщение в диспетчерский центр 11, оператор диспетчерского центра 11, оценив с помощью блока 17 отображения и принятия решений обстановку, формирует командные сообщения о запрете излучения объектовых терминалов 9 стандартной сотовой сети подвижной связи тех объектовых комплексов 1, которые оказались избыточными. Через пультовое оконечное устройство 13 и центральный терминал 12 стандартной сотовой сети подвижной связи эти командные сообщения передаются на указанные объектовые комплексы 1, принимаются их объектовыми терминалами 9 стандартной сотовой сети подвижной связи и через коммутатор 8 передаются в контроллер 6. Контроллер 6 формирует и через коммутатор 8 передает команду запрета излучения бортового терминала 9 стандартной сотовой сети подвижной связи. После этого мониторинг и сопровождение УТС осуществляются в диспетчерском центре 11 с использованием только необходимого и достаточного количества объектовых комплексов 1, выполняющих функции ретрансляторов. Это позволяет существенно уменьшить среднюю плату за услуги стандартной сотовой сети подвижной связи.
После получения оператором диспетчерского центра 11 предупреждения о потере связи между УТС и тем или иным контролируемым объектом-ретранслятором оператор диспетчерского центра 11 посылает командное сообщение о снятии запрета на излучение объектового терминала 9 стандартной сотовой сети подвижной связи того объектового комплекса 1, с которым эта связь возможна. Это командное сообщение через пультовое оконечное устройство 13 и центральный терминал 12 стандартной сотовой сети подвижной связи передается на указанный объектовый комплекс 1, поступая в объектовый терминал 9 стандартной сотовой сети подвижной связи. Наличие в объектовом терминале 9 стандартной сотовой сети подвижной связи командного сообщения о снятии запрета на излучение данного объектового комплекса 1 вызывает формирование соответствующей команды на контроллер 6. По этой команде контроллер 6 переключает коммутатор 8 в режим передачи сигналов с борта УТС, полученных объектовым приемопередатчиком 10 ретрансляционного канала, в контроллер 6, а после этого те же сигналы передаются через коммутатор 8 в объектовый терминал 9 стандартной сотовой сети подвижной связи и ретранслируются им в эфир. Дальнейшие операции по приему и обработке ретранслированного сигнала в диспетчерском центре 11 осуществляются так же, как было описано выше.
Таким образом, предложенная технология позволяет осуществлять радиопоиск, мониторинг и сопровождение УТС даже в тех случаях, когда установленный на борту УТС объектовый терминал 9 стандартной сотовой сети подвижной связи подавлен помехой. Это достигается благодаря использованию в качестве ретрансляторов объектовых комплексов 1, установленных на других контролируемых объектах на ТС и на объектах недвижимости.
Еще более высокая степень помехозащищенности может быть обеспечена благодаря использованию в ретрансляционном канале хоппинг-сигнала (описанного в патентах RU №2278415, G08В 25/10, G08C 29/12, Н04В 1/713, RU №2265250, G08В 25/08, G08C 15/00 и в ряде других материалов).
Местоположение УТС в системе, реализующей рассматриваемый способ, может быть определено несколькими методами.
Если установленный на борту УТС блок 7 автономной навигации, использующий GPS-приемник, не подавлен помехой, то наиболее просто местоположение УТС определяется по значениям координат, измеренным этим GPS-приемником и переданным в диспетчерский центр 11 либо объектовым комплексом 1 самого УТС, либо с помощью соседних объектовых комплексов 1.
Если же злоумышленником удалось подавить помехой указанный GPS-приемник, предложенное техническое решение позволяет установить местоположение УТС, используя измерения дальностей.
Координаты УТС могут быть рассчитаны в этом случае хорошо известным в геодезии методом трилатерации - по измеренным расстояниям между УТС, пославшим сообщение, и по крайней мере двумя контролируемыми объектами, ретранслировавшими указанное сообщение, а также по расстоянию между этим контролируемыми объектами-ретрансляторами.
В свою очередь, указанные расстояния могут быть определены либо по результатам измерения уровней сигналов, либо по разностям времен прихода сигналов, принимаемых на вышеупомянутых контролируемых объектах.
Конкретная техническая реализация указанных способов измерения дальностей не относится к предмету изобретения и поэтому в настоящей заявке не рассматривается.
Таким образом, предложено техническое решение, обеспечивающее решение поставленной задачи создания технологии радиопоиска, мониторинга и сопровождения УТС, позволяющей существенно упростить техническую реализацию и, соответственно, снизить финансовые затраты, связанные с созданием и эксплуатацией помехозащищенных систем радиопоиска, мониторинга и сопровождения УТС.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОХРАНЫ И ПОИСКА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2008 |
|
RU2349962C1 |
| СПОСОБ РАДИОПОИСКА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2008 |
|
RU2351489C1 |
| СПУТНИКОВАЯ ОХРАННО-ПОИСКОВАЯ СИСТЕМА | 2008 |
|
RU2349472C1 |
| СПОСОБ ПЕРЕДАЧИ ИЗВЕЩЕНИЙ ОБ УГОНЕ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2363600C1 |
| СПУТНИКОВАЯ ОХРАННО-ПОИСКОВАЯ СИСТЕМА | 2013 |
|
RU2528090C1 |
| СПОСОБ МОНИТОРИНГА, СОПРОВОЖДЕНИЯ И УПРАВЛЕНИЯ НАЗЕМНЫМИ ТРАНСПОРТНЫМИ СРЕДСТВАМИ | 2005 |
|
RU2288509C1 |
| СПОСОБ РАДИОПОИСКА И ПЕРЕХВАТА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2004 |
|
RU2253578C1 |
| РАДИОКАНАЛЬНАЯ СИСТЕМА ДЛЯ ПОИСКА И ПЕРЕХВАТА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2003 |
|
RU2228860C1 |
| СИСТЕМА МОНИТОРИНГА ТРАНСПОРТНЫХ СРЕДСТВ И ОБЪЕКТОВ НЕДВИЖИМОСТИ | 2004 |
|
RU2243113C1 |
| РАДИОПЕЛЕНГАЦИОННАЯ СИСТЕМА ДЛЯ ПОИСКА И СОПРОВОЖДЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2005 |
|
RU2264937C1 |
Изобретение относится к области мониторинга, сопровождения и управления транспортными средствами, преимущественно автомобилями. На каждом транспортном средстве принимают сигналы глобальной спутниковой системы радионавигации и рассчитывают текущие координаты, скорость движения, время. Посредством датчиков определяют состояние транспортного средства и в случае угона формируют извещения, преобразуют их в информационные сообщения с полями служебной информации. Сообщения переносят на высокочастотные несущие и передают по радиоэфиру, используя объектовый терминал стандартной сотовой сети подвижной связи, например GSM-сети, и/или объектовый приемопередатчик ретрансляционного канала. В диспетчерском центре принимают сигналы с сообщениями, демодулируют и декодируют их, осуществляют обработку с определением координат и построением траекторий движения угнанного транспортного средства (УТС). На фоне фрагментов электронной карты-схемы местности отображают траектории в сопровождении текстовой информации. Для УТС формируют командные сообщения с кодами, например, для блокирования движения УТС и передают их по стандартной сотовой сети подвижной связи и/или ретрансляционному каналу. На УТС принимают сообщения, декодируют и воздействуют на исполнительные органы. Передачу сигналов с информационными и командными сообщениями по ретрансляционному каналу от УТС к диспетчерскому центру и обратно дополнительно осуществляют с помощью приемопередатчиков ретрансляционного канала, установленных на других транспортных средствах и объектах недвижимости в зоне действия объектового приемопередатчика. Изобретение упрощает радиопоиск, мониторинг и сопровождение УТС. Использование в ретрансляционном канале других контролируемых объектов позволяет осуществлять обмен информацией между УТС и диспетчерским центром без установки базовых станций. 5 з.п. ф-лы, 3 ил.
| СПОСОБ МОНИТОРИНГА, СОПРОВОЖДЕНИЯ И УПРАВЛЕНИЯ НАЗЕМНЫМИ ТРАНСПОРТНЫМИ СРЕДСТВАМИ | 2005 |
|
RU2288509C1 |
| РАДИОКАНАЛЬНАЯ СИСТЕМА МОНИТОРИНГА И СОПРОВОЖДЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2004 |
|
RU2240938C1 |
| СПОСОБ ОПЕРАТИВНОГО СОПРОВОЖДЕНИЯ И УПРАВЛЕНИЯ НАЗЕМНЫМИ ТРАНСПОРТНЫМИ СРЕДСТВАМИ | 2001 |
|
RU2217797C2 |
| СПОСОБ КОНТРОЛЯ ЗА ТРАНСПОРТИРОВКОЙ ГРУЗОВ | 1999 |
|
RU2157565C1 |

