Область техники
Изобретение относится к адаптеру, предназначенному для установки на несущей конструкции ракеты-носителя, когда ракета-носитель должна одновременно транспортировать располагаемые вблизи друг от друга по меньшей мере две полезные нагрузки, например искусственные спутники.
Такой адаптер может быть использован на любом типе ракеты-носителя тогда, когда желательно одновременно транспортировать несколько тяжелых искусственных спутников посредством их расположения вблизи друг от друга под носовым конусом одной и той же ракеты-носителя.
Предшествующий уровень техники
Для того чтобы уменьшить затраты, связанные с запуском искусственных спутников, чаще всего считается целесообразным одновременно транспортировать несколько спутников на одной и той же ракете-носителе, если это позволяют их размеры.
Уже находятся в эксплуатации средства, обеспечивающие возможность транспортирования нескольких искусственных спутников на одной и той же ракете-носителе и их последующего отделения от нее. Например в патентах США US-A-3380687 и US-A-5199672 представлены средства, предназначенные для размещения под носовым конусом ракеты-носителя для одновременного удержания здесь относительно большого количества небольших спутников.
В случае тяжелых и относительно больших искусственных спутников ни одно из известных средств не позволяет полностью исключить опасность столкновения, когда спутники отделяются от ракеты-носителя. Поэтому такие спутники обычно располагаются вблизи друг от друга на несущей конструкции в виде плиты или платформы, а их отделение от нее происходит перпендикулярно ей. Сброс спутника неизбежно создает опасность столкновения с соседним спутником или спутниками, когда разделяющее их расстояние относительно мало.
В патенте Германии DE-A-4243562 предлагается устанавливать на одну и ту же ракету-носитель весьма малые полезные нагрузки. В одном из описанных вариантов осуществления конструкции грузы размещают на несущей конструкции посредством адаптера, позволяющего осуществить наклон груза, перед тем как он отделяется от ракеты-носителя. Точнее, средство содержит часть, наклонно установленную на несущей конструкции, направляющую часть, несомую наклонной частью, и несущую часть, к которой жестко крепится груз. Напряжения, возникающие в полете, воспринимаются направляющим устройством несущей части на направляющей части. Перед запуском наклонный механизм осуществляет управление наклоном трех частей по отношению к несущей конструкции. Действие взрывного болта, первоначально соединяющего направляющую часть с несущей частью, обеспечивает возможность сброса груза и последней упомянутой части под действием выталкивающих пружин.
Устройство, описанное в патенте Германии DE-A-4243562, позволяет избежать опасности столкновения небольших грузов, несомых одной и той же ракетой-носителем, в течение запуска этих грузов. Однако это никак нельзя отнести к запуску тяжелых искусственных спутников, в состав которых входят хрупкие элементы. В этом случае механизм управления наклоном воспринимает все напряжения и нагрузки, которые создаются выталкивающими пружинами. Поэтому механизму должны быть приданы такие размеры, чтобы упомянутые напряжения не оказывали влияния на ориентацию груза при его сбросе. В случае тяжелого груза такое придание размеров приведет к приложению значительного ударного или импульсного воздействия к каждому грузу в течение наклона перед сбросом. Это ударное воздействие неприемлемо, поскольку оно может привести к повреждению и/или нарушению регулировки определенных компонентов искусственного спутника.
Кроме того, средства, описанные в патенте Германии DE-A-4243562, вызывают необходимость сброса несущей части вместе со спутником. Это приводит к увеличению веса последнего и поэтому усиливает ранее указанные недостатки. Вообще говоря, такое повышение веса оказывает весьма вредное влияние, особенно в том случае, когда оно имеет место на каждом из искусственных спутников, несомых ракетой-носителем.
Описание изобретения
Изобретение относится к адаптеру, предназначенному для установки между несущей конструкцией, расположенной под носовой конусной частью ракеты-носителя, и каждой из полезных нагрузок, так чтобы для транспортных несущих систем небольшого размера без их повреждения и нарушения регулировок, а также без опасности столкновения при отделении обеспечить возможность транспортирования по меньшей мере двух рядом расположенных относительно больших и тяжелых полезных нагрузок.
Согласно изобретению этот результат получается посредством адаптера полезной нагрузки, предназначенного для установки на несущей конструкции для одновременного удержания на одной и той же ракете-носителе по меньшей мере двух расположенных рядом полезных нагрузок, при этом упомянутый адаптер содержит:
- опорную часть, которая может быть жестко прикреплена к несущей конструкции;
- наклонную часть, подсоединенную к опорной части или к несущей конструкции с помощью шарнирных средств;
- первые дистанционно освобождаемые удерживающие средства, установленные между опорной частью и наклонной частью для того, чтобы в обычном состоянии сохранять наклонную часть в положении транспортирования нагрузки;
- средства управления наклоном, установленные между наклонной частью и опорной частью или несущей конструкцией, с тем чтобы автоматически привести наклонную часть в положение отделения полезной нагрузки посредством поворота вокруг шарнирных средств в течение освобождения удерживающих средств;
- конец средств стопорения перемещения, взаимосвязанный со средствами управления наклоном и автоматически приводимый в действие, когда наклонная часть приходит в положение отделения полезной нагрузки;
- вторые дистанционно освобождаемые удерживающие средства, которые могут быть помещены непосредственно между наклонной частью и полезной нагрузкой с тем, чтобы в обычном состоянии удерживать последнюю на наклонной части.
Каждая из полезных нагрузок помещена на несущей конструкции, которая обычно выполнена в форме круглой опорной плиты, посредством отдельного адаптера. В течение всей фазы запуска адаптеры остаются в несущем положении, позволяя полезным нагрузкам, находящимся вблизи друг от друга под носовой конусной частью ракеты-носителя, занимать минимальный объем. Когда желательно осуществить отделение одной или более полезных нагрузок после сброса носового конуса, удерживающие средства адаптера, соответствующие ему, освобождаются так, что средства управления наклоном автоматически приводят наклонную часть в положение запуска, в котором она крепится концом средств стопорения перемещения. В этом положении полезная нагрузка, расположенная на адаптере, отклоняется от соседней полезной нагрузки, например, на угол, приблизительно составляющий 15o. Поэтому, когда дается команда на отделение полезной нагрузки, оно происходит без опасности столкновения. Кроме того, в связи с тем что напряжения, создаваемые в течение сброса, всецело выдерживаются концом средств стопорения перемещения, можно придать средствам управления наклоном такие размеры, чтобы избежать воздействия на груз ударов или толчков. В конце перемещения также может быть обеспечено средство поглощения ударов.
Следует заметить, что управление адаптерами, посредством которых каждая полезная нагрузка расположена на несущей конструкции, может осуществляться одновременно или по отдельности с тем, чтобы гарантировать одновременный или выполняемый по отдельности наклон соответствующих полезных нагрузок до их отделения.
В предпочтительном варианте осуществления изобретения первые удерживающие средства включают в себя по меньшей мере одну первую пиротехническую разъединительную полосу, а вторые удерживающие средства включают в себя по меньшей мере одну вторую пиротехническую разъединительную полосу.
Предпочтительно, чтобы опорная и наклонная части удерживались в контакте посредством первой полосы вдоль фактически плоской и круглой соединительной поверхности, когда наклонная часть занимает положение удержания полезной нагрузки. В этом случае шарнирные средства образуют ось поворота, фактически расположенную в плоскости поверхности соединения снаружи от упомянутой поверхности и ориентированную фактически параллельно касательной к этой поверхности. Кроме того, полезная нагрузка и наклонная часть могут удерживаться в непосредственном контакте посредством второй полосы в соответствии с фактически плоской и круглой поверхностью соединения.
Для исключения опасности столкновения между полезными нагрузками в течение их отделения ось поворота данного адаптера располагается противоположно по меньшей мере одной полезной нагрузке, размещенной на несущей конструкции, по отношению к поверхности соединения.
В предпочтительном варианте осуществления изобретения средства управления наклоном содержат по меньшей мере один пружинный адаптер, концы которого соответствующим образом шарнирно соединены с наклонной частью и с опорной частью или с несущей конструкцией, а концы средств стопорения перемещения взаимосвязаны с упомянутым адаптером.
Предпочтительно, чтобы наклонная часть удерживала выталкивающие средства, например пружинные выталкиватели, которые действуют непосредственно на полезную нагрузку.
Краткое описание чертежей
Ниже предпочтительный вариант осуществления изобретения будет описан более подробно иллюстративным образом и без наложения каких-либо ограничений, причем со ссылками на прилагаемые чертежи, на которых:
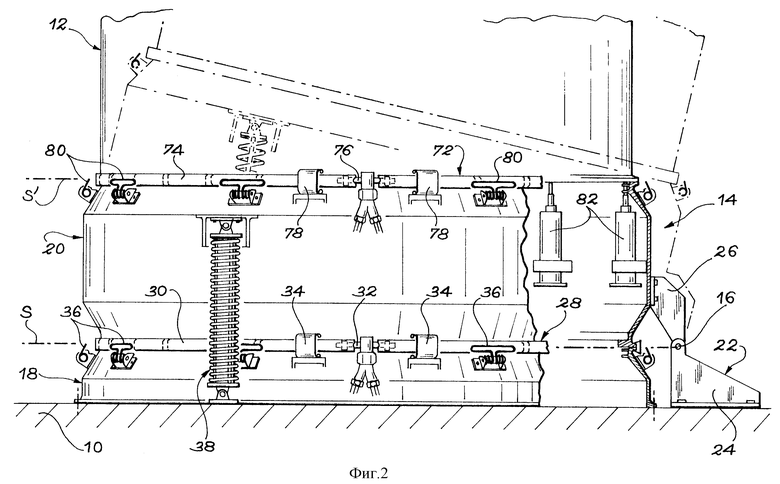
на фиг. 1 схематично представлен вид сбоку, показывающий установку двух искусственных спутников на опорной плите ракеты-носителя посредством двух адаптеров, выполненных согласно изобретению, при этом адаптер, представленный на фигуре справа, занимает положение удержания, в то время как адаптер, представленный на ней слева, занимает положение для запуска;
на фиг. 2 в увеличенном масштабе и частично в сечении представлен вид сбоку адаптера, выполненного согласно изобретению, показанного непрерывной линией в положении удержания спутника;
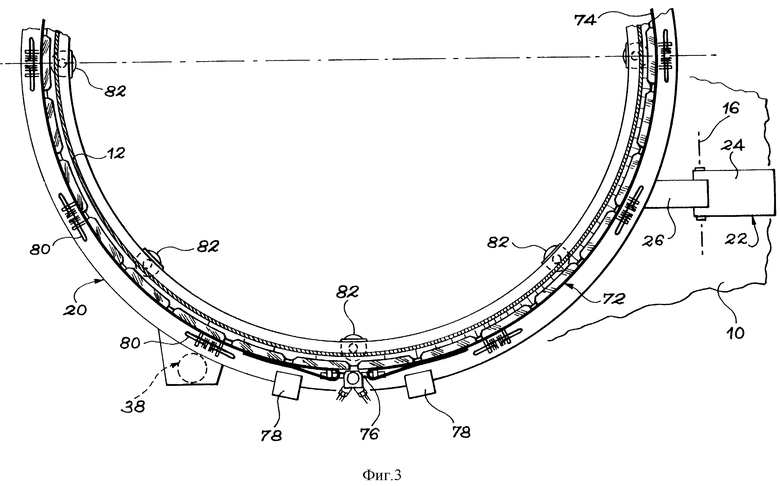
на фиг. 3 представлен половинчатый вид в плане адаптера, выполненного согласно фиг. 2;
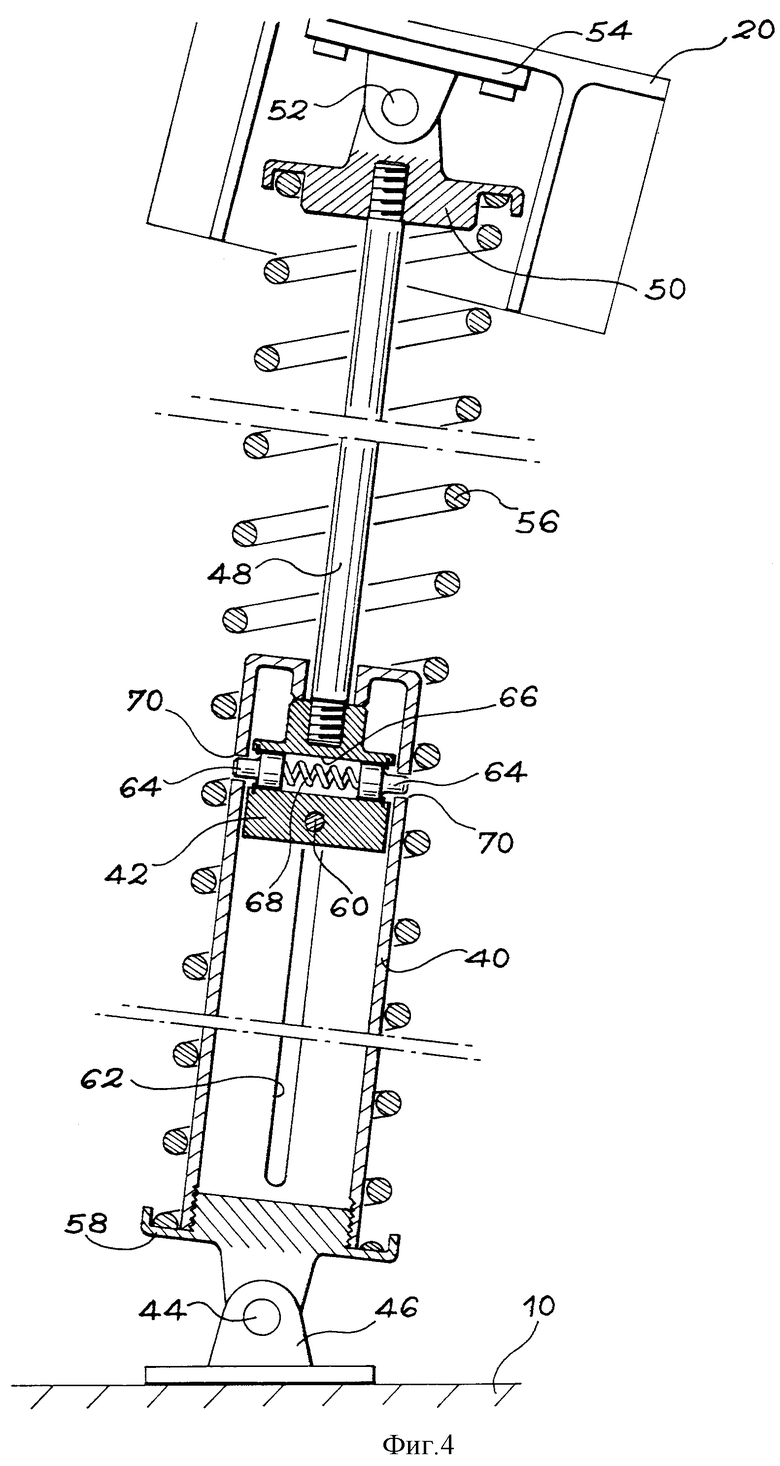
на фиг. 4 в увеличенном масштабе представлен вид сбоку одного из пружинных приводных устройств, используемых для управления наклоном адаптера, при этом упомянутое приводное устройство показано в его крайнем вытянутом положении после выполнения операции.
Подробное описание варианта осуществления изобретения
На фиг. 1 позицией 10 обозначена круглая опорная плита, образующая несущую конструкцию, расположенную на верхней части не показанной ракеты-носителя в не показанном носовом конусе, образующем верхнюю оболочку ракеты-носителя. Круглая опорная плита 10 представляет собой обычную несущую конструкцию, используемую на некоторых имеющихся ракетах-носителях, и не составляет часть настоящего изобретения.
Изобретение относится к тому случаю, когда круглая опорная плита 10 одновременно удерживает по меньшей мере две полезные нагрузки, такие как два тяжелых искусственных спутника 12, расположенных вблизи друг от друга под носовым конусом ракеты-носителя.
Согласно существующей технологии искусственные спутники 12 должны быть установлены непосредственно на опорной плите 10 с помощью дистанционно разъединяемых удерживающих средств. Когда подается команда на разъединение сбрасывающие средства, например пружинные выталкиватели, должны обеспечить отход спутников 12 от опорной плиты 10 в направлении, фактически перпендикулярном плоскости последней. Принимая во внимание близость расположения спутников 12 друг к другу, обусловленную их объемом, можно говорить о наличии значительной опасности их столкновения.
Согласно изобретению такая опасность исключается посредством установки небольшого адаптера 14 между каждым из спутников 12 и круглой опорной плитой 10.
Как показано на правой части фиг. 1, адаптеры 14 в своем обычном состоянии находятся в положении удержания спутника, при этом спутник занимает положение, идентичное тому положению, которое он занимал бы при отсутствии адаптера, т.е. если бы спутник был размещен непосредственно на опорной плите. Адаптер 14 сохраняется в этом положении удержания на всем протяжении пусковой фазы, пока ракета-носитель не выйдет на орбиту выведения соответствующего спутника.
Когда ракета-носитель достигает упомянутого положения, соответствующий адаптер 14 приводится в положение отделения спутника, схематически представленное на левосторонней части фиг. 1. В этом положении отделения направление, в котором производится сброс спутника 12, составляет с перпендикуляром к плоскости, образуемой круглой опорной плитой 10, угол, приблизительно составляющий 15o. Это направление сброса представлено стрелкой F на фиг. 1.
Наклон направления F сброса получается поворотом спутника 12 на вышеупомянутый угол, контролируемый адаптером 14, вокруг оси 16. С этой целью ось 16 поворота ориентирована параллельно плоскости, образуемой круглой опорной плитой 10. Кроме того, ось 16 поворота располагается на каждом адаптере 14 со стороны, противоположной соседнему спутнику 12, так что наклон спутника, контролируемый адаптером, обеспечивает наклон направления сброса F в сторону от соседнего спутника, как схематически показано на фиг. 1.
Вследствие описанных выше отличительных признаков отделение любого из спутников 12 происходит без возникновения опасности столкновения между одним из спутников и смежным спутником или спутниками, но без увеличения общих размеров спутников под носовым конусом при запуске.
Далее будет дано более подробное описание предпочтительного варианта осуществления конструкции адаптера 14, выполненного согласно изобретению, со ссылкой на фиг. 2-4.
Адаптер 14, во-первых, содержит опорную часть 18 в форме цилиндрического обруча, который должен быть жестко прикреплен к круглой опорной плите 10, например, посредством болтов, которые не показаны. Адаптер 14 также содержит наклонную часть 20 в форме цилиндрического обруча для захождения в него и непосредственного удержания соответствующего спутника 12.
Ось 16 поворота обеспечивается двумя наклонными соединениями 22. Эти соединения, составляющие часть адаптера 14, соединяют наклонную часть 20 с опорной плитой 10. В случае более определенной формы каждое из соединений 22 имеет основание 24, жестко прикрепленное, например посредством болтов, к опорной плите 10, и кронштейн 26, жестко прикрепленный, например посредством болтов, к наклонной части 20. Кронштейн 26 соединен с основанием 24 посредством поворотного пальца, ориентированного соответственно оси 22.
Следует заметить, что как вариант основания 24 могут соединяться непосредственно с опорной частью 18. Кроме того, количество соединений 22 может и не быть равно двум.
В положении удержания спутника, представленном на фиг. 2, опорная часть 18 и наклонная часть 20, обе из которых выполнены в форме цилиндрических обручей фактически одного и того же диаметра, располагаются соосно и в контакте друг с другом вдоль фактически плоской и круглой поверхности соединения, расположенной в плоскости, представленной линией S на фиг. 2.
В этом предпочтительном устройстве ось 16 поворота, обеспечиваемая соединениями 22, фактически располагается в плоскости S снаружи от соединительной поверхности частей 18 и 20 и ориентирована в направлении, фактически параллельном касательной к упомянутой поверхности соединения.
Адаптер 14, выполненный согласно изобретению, также содержит первые дистанционно разъединяемые удерживающие средства 28, с помощью которых наклонная часть 20 в обычном состоянии сохраняется в положении удержания спутника, представленном на фиг. 2, т.е. в контакте с опорной частью 18 вдоль вышеупомянутой круглой поверхности соединения, расположенной в плоскости S.
В варианте осуществления конструкции, представленном на фиг. 2, упомянутые удерживающие средства 28 содержат полосу 30, которая проходит вдоль контактирующих участков частей 18 и 20 по всей периферии упомянутых частей. Полоса 30 снабжена жесткими сегментами, которые имеют фактически U-образную форму поперечного сечения и одновременно перекрывают два выступа, образованных у смежных концов частей 18 и 20 с тем, чтобы привести их в зацепление друг с другом вдоль упомянутой круговой соединительной поверхности.
Полоса 30 имеет по меньшей мере одну секцию 32, управление дистанционным отсоединением которой осуществляется пиротехническими средствами известным способом. Скобы 34 и пружинные стопоры 36, установленные на опорной части 18, гарантируют, что после отсоединения секции 32 полоса 30 не отделяется от опорной части 18, так что в этом случае не возникает опасность повреждения смежных конструкций.
Для того чтобы привести наклонную часть 20 в положение отделения, схематически показанное слева на фиг. 1 и штрих-пунктирными линиями на фиг. 2, адаптер 14 также имеет средства управления наклоном упомянутой части, которые автоматически приводятся в действие, когда происходит отсоединение секции 32 полосы 30.
В варианте осуществления конструкции, представленном на чертежах, эти средства управления наклоном содержат два пружинных приводных устройства 38, расположенных между опорной плитой 10 и наклонной частью 20. Точнее, каждое из пружинных приводных устройств 38 ориентировано соответственно оси, фактически перпендикулярной плоскости опорной плиты 10, когда адаптер 14 занимает положение удержания спутника. На фиг. 2 и 3 более определенно показано, что пружинные приводные устройства 38 располагаются снаружи от опорной части 18 в симметричных местах относительно средней плоскости адаптера, ориентированной перпендикулярно оси 16 поворота и относительно удаленной от упомянутой оси.
На фиг. 4 более подробно показано, что каждое из пружинных приводных устройств 38 имеет центральную трубу 40, в которую со скольжением заходит поршнеобразная часть 42. Первый конец цилиндрической трубы 40 шарнирно установлен посредством пальца 44 на проушине 46, прикрепленной к опорной плите 10, например, посредством болтов. Палец 44 ориентирован параллельно поворотной оси 16 адаптера.
Поршнеобразная часть жестко крепится к первому концу штока 48, ориентированного соответственно оси цилиндрической трубы 40 на пути перемещения от конца упомянутой трубы, шарнирно прикрепленной к пальцу 44. Противоположный конец штока 48 жестко подсоединен к чашке 50, шарнирно установленной посредством пальца 52 на проушине 54, жестко прикрепленной к наклонной части 20, например, посредством болтов, которые не показаны. Палец 52 ориентирован параллельно пальцу 44, а также поворотной оси 16 адаптера 14.
Узел, образованный посредством цилиндрической трубы 40 и штока 48, окружен работающей на сжатие спиральной пружиной 56, первый конец которой опирается на чашку 50, а противоположный конец опирается на кольцеобразный выступ 58, окружающий конец цилиндрической трубы 40, шарнирно подсоединенной к пальцу 44.
Кроме того, поршнеобразная часть 42 на своей периферии имеет два диаметрально противоположных направляющих пальца 60, которые скользят в продольных канавках 62, образованных внутри цилиндрической трубы 40 и параллельных ее оси. Узел, составленный из пальцев 60 и канавок 62, предотвращает вращение поршнеобразной части 42, когда она смещена внутри цилиндрической трубы 40.
Каждое из пружинных приводных устройств 38 также снабжено концом средств стопорения перемещения, с помощью которого удлиненное положение, занимаемое приводным устройством в течение освобождения пружины 56, точно определяет угол наклона, например, составляющий приблизительно 15o, обеспечиваемый для спутника, когда он занимает положение отделения после отсоединения полосы 30.
Основная функция этих стопорных средств заключается в восприятии напряжений и деформаций, прилагаемых в течение отделения и сброса спутника 12. Поэтому они позволяют придать пружинному приводному устройству 38 такие размеры, чтобы наклонное движение происходило медленно и без создания каких-либо ударных воздействий, вредно влияющих на оборудование, несомое спутником. С каждым из пружинных приводных устройств 38 также может быть взаимосвязан конец средств поглощения ударов при перемещении.
В варианте осуществления конструкции, представленном на фиг. 4, конец средств стопорения перемещения содержит две стопорных части 64, противоположно установленных в расточке 66, радиально пересекающей поршнеобразную часть 42. Работающая на сжатие пружина 68, расположенная между этими двумя стопорными частями 64, постоянно воздействует на них в направлении внутренней поверхности цилиндрической трубы 40.
Когда пружинное приводное устройство 38 достигает положения своей полной протяженности, представленное на фиг. 4, имеющие уменьшенный диаметр наружные концы стопорных частей 64 находятся перед двумя диаметрально противоположными отверстиями 70, образованными в цилиндрической трубе 40. Поэтому под действием пружины 68 эти концы стопорных частей 64 проникают в отверстия 70. После этого поршнеобразная часть 42 автоматически блокируется в упомянутом положении, которое препятствует какому-либо дополнительному растяжению пружины 56. Следует заметить, что взаимодействие направляющих пальцев 60 с направляющими канавками 62 препятствует относительному вращению поршнеобразной части 42 и цилиндрической трубы 40. Поэтому стопорные части 64 автоматически подходят к месту перед отверстиями 70, когда пружина 56 достигает своего полного растяжения.
Как вариант конец средств стопорения перемещения также может включать в себя пружинные листы, установленные на периферии поршнеобразной части 42, так чтобы обеспечивалась возможность перемещения от последней в их нижней части, если рассматривать фиг. 3. В конце перемещения пружинные листы располагаются в кольцевой канавке, образованной в цилиндрической трубе 40, и после этого препятствуют смещению части 42 по направлению к нижней части согласно фиг. 3. Наклонная часть 20 имеет средство, позволяющее сохранить спутник 12 на этой части и контролировать его отделение, когда спутник освобожден.
Как схематически показано на фиг. 2 и 3, упомянутые устройства содержат вторые дистанционно разъединяемые удерживающие средства 72, обеспечивающие непосредственный контакт спутника 12 и наклонной части 20 в соответствии с плоской круглой поверхностью S' соединения. До наклона части 20 поверхности S и S' соединения параллельны друг другу. Вторые удерживающие средства 72 сконструированы таким же образом, что и удерживающие средства 28, с помощью которых наклонная часть 20 в обычном состоянии удерживается в контакте с опорной частью 18 в положении транспортирования спутника.
Таким образом, вторые удерживающие средства 72 содержат полосу 74, которая в обычном состоянии окружает два выступа, так чтобы они удерживались друг против друга, причем они соответствующим образом образованы на той стороне наклонной части 20, которая противоположна опорной части 18, и на смежной с ней стороне спутника 12. Полоса 74 оснащена по меньшей мере одной пиротехнической секцией 76. На наклонной части 20 установлены скобы 78 и эластичные стопоры 80, чтобы предотвратить покидание полосы 74 с опасностью повреждения соседних конструкций, когда приводится в действие разъединительная секция 76.
Отделение спутника 12 в течение отсоединения полосы 74 обеспечивается сбрасывающими средствами, образованными, например, пружинными сбрасывателями 82, установленными внутри наклонной части 20 и систематически распределенными по всей ее периферии. Как, например, представлено на фиг. 3, на наклонной части 20 может быть установлено восемь пружинных сбрасывателей 82, чтобы обеспечить отделение спутника 12 после разъединения полосы 74.
В приведенном выше описании показано, что адаптер согласно изобретению обеспечивает расположение вблизи друг от друга на одной и той же опорной плите, находящейся под носовым конусом ракеты-носителя, нескольких относительно тяжелых и громоздких полезных нагрузок в объеме, который едва ли больше объема индивидуальных нагрузок, без возникновения какой-либо опасности столкновения, когда производится сброс нагрузок, причем это справедливо как для случая, когда нагрузки сбрасываются последовательно, так и тогда, когда они сбрасываются одновременно. Важно отметить, что полученный результат не приводит к воздействию неприемлемых ударов на грузы, несомые летательным аппаратом, и к увеличению его веса.
Следует заметить, что такие элементы, как основание 24 и скобы 46, которые в описанных вариантах крепятся непосредственно к несущей конструкции 10, также могут быть прикреплены к опорной части 18, что не выходит за пределы изобретения.
Изобретение относится к космической технике и, в частности, к адаптерам полезных нагрузок, выводимых ракетой-носителем. Согласно изобретению между каждым искусственным спутником 12 и опорной плитой 10 расположен адаптер 14. При запуске ракеты-носителя малые адаптеры 14 занимают, при удержании спутников, ограниченное по габаритам положение. При управлении отделением спутника его адаптер 14 переходит в положение отделения, в котором спутник 12 наклоняется и отходит от соседнего спутника или спутников. Изобретение дает возможность установки вблизи друг друга под обтекателем ракеты-носителя нескольких искусственных спутников без опасности их столкновения во время отделения. 6 з.п.ф-лы, 4 ил.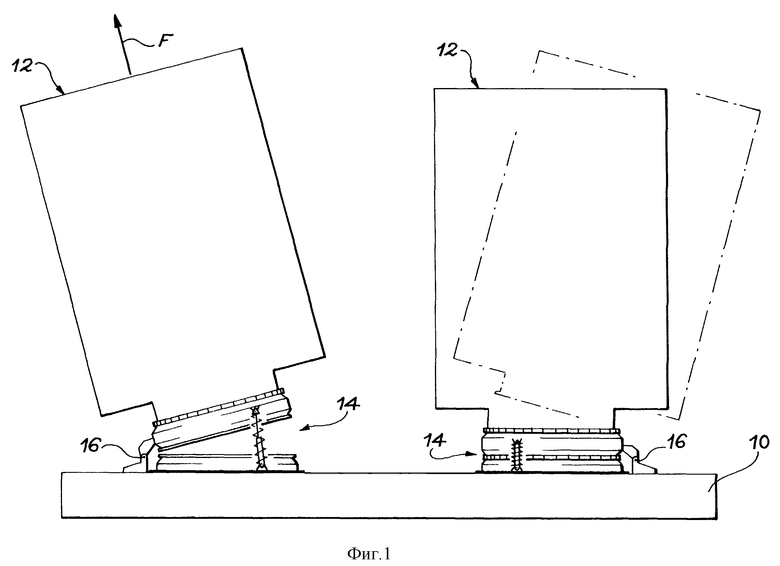
| DE 4243562 A1, 23.06.1994 | |||
| US 3903803 A, 09.09.1975 | |||
| US 4632339 A, 30.12.1986 | |||
| Торфодобывающая машина с вращающимся измельчающим орудием | 1922 |
|
SU87A1 |

