Изобретение относится к прямоточному воздушно-реактивному двигателю для летательного аппарата со сверхзвуковой и/или гиперзвуковой скоростью полета, специально предназначенного для функционирования в достаточно широком диапазоне скоростей. В данном случае рассматриваемый диапазон простирается от скоростей, соответствующих числу Маха порядка 1-2, до скоростей, соответствующих числу Маха порядка 15-20.
Известен прямоточный воздушно-реактивный двигатель для летательного аппарата со сверхзвуковой и/или гиперзвуковой скоростью полета, предназначенный для функционирования в достаточно широком диапазоне скоростей полета и содержащий один вход для окислителя или воздухозаборник, по меньшей мере, один инжектор топлива, камеру сгорания с переменной геометрией для осуществления смешивания топлива с окислителем и приготовления таким образом подлежащей сжиганию горючей смеси, реактивное сопло для отведения в атмосферу газов, выходящих из упомянутой камеры сгорания, при этом последняя образована зоной корпуса данного прямоточного двигателя, а корпус имеет в окрестностях переходной зоны между камерой сгорания и реактивным соплом эволютивную или изменяемую геометрию (US, 5081834, кл. F 02 K 7/10, 1992).
Недостатком известного двигателя является невозможность нормально функционировать в широком диапазоне скоростей при сохранении максимальной эффективности во всем этом диапазоне.
В основу настоящего изобретения положена задача создания прямоточного воздушно-реактивного двигателя, способного функционировать в широком диапазоне скоростей при сохранении максимальной эффективности во всем этом диапазоне.
Для решения поставленной задачи предлагаемый прямоточный воздушно-реактивный двигатель для летательного аппарата со сверхзвуковой и/или гиперзвуковой скоростью полета, специально предназначенный для функционирования в достаточно широком диапазоне скоростей, в соответствии с данным изобретением характеризуется тем, что этот двигатель содержит вход для окислителя или воздухозаборник, по меньшей мере один инжектор топлива, корпус прямоточного воздушно-реактивного двигателя, содержащий, с одной стороны, зону камеры сгорания, в которой путем смешивания топлива и окислителя осуществляется приготовление горючей смеси, которая затем сгорает, а с другой стороны, зону реактивного сопла, предназначенного для отвода газов, выходящих из камеры сгорания; при этом камера сгорания и реактивное сопло образованы двумя зонами корпуса, а упомянутый корпус этого прямоточного воздушно-реактивного двигателя обладает в зоне перехода между камерой сгорания и реактивным соплом некоторой эволютивной или изменяемой геометрией, постепенно переходящей от сходящегося, а затем расходящегося продольного сечения для скоростей полета, соответствующих относительно малой величине числа Маха, к по меньшей мере приблизительно постоянному или одинаковому продольному сечению, а затем расширяющемуся в зоне реактивного сопла для скоростей полета, соответствующих относительно большой величине числа Маха (выше 5,5 до 20).
Такая конструкция обеспечивает в функции скорости полета данного летательного аппарата плавную адаптацию геометрии корпуса прямоточного воздушно-реактивного двигателя в целом и, в частности, в зоне перехода между камерой сгорания и реактивным соплом (горловина сопла) для того, чтобы сохранить в указанном выше достаточно широком диапазоне скоростей оптимальные условия полета, в частности максимальную величину тяги независимо от внешних условий (под оптимальными условиями полета здесь понимается расход топлива, аэродинамическое давление, профиль потока окислителя, то есть набегающего потока воздуха, на соответствующем входе).
Говоря другими словами, такая конструкция позволяет как бы постепенно "убирать" горловину реактивного сопла (геометрия сначала сходящейся, а затем расходящейся формы), существующую при относительно малых скоростях полета, с тем, чтобы в конечном счете при достижении определенной скорости полета (а именно при скорости, соответствующей величине числа Маха порядка 8) получить практически постоянное продольное сечение камеры сгорания, за которой следует реактивное сопло с расширяющимся продольным сечением.
В частности, в том случае, когда упомянутый корпус прямоточного воздушно-реактивного двигателя имеет в целом форму канала с прямоугольным поперечным сечением, образованного попарно противоположными друг другу стенками, по меньшей мере одна из этих стенок содержит пластины или панели, шарнирно связанные между собой и в случае необходимости с концами упомянутой стенки при помощи соответствующих осей, располагающихся поперечно по отношению к общей продольной оси корпуса - данного прямоточного воздушно-реактивного двигателя, при этом относительное положение по меньшей мере некоторых из этих пластин или панелей определяет эволютивную или изменяемую геометрию переходной зоны между камерой сгорания и реактивным соплом.
В предпочтительном варианте реализации для того чтобы обеспечить возможность относительного шарнирного движения упомянутых панелей, по меньшей мере некоторые из них выполнены из двух частей, имеющих определенную зону перекрытия.
В то же время, можно считать предпочтительным, чтобы упомянутая панель, располагающаяся со стороны реактивного сопла, имела треугольное поперечное сечение, вершина которого ориентирована в направлении внутрь корпуса данного прямоточного воздушно-реактивного двигателя, а две другие его вершины соответствовали осям шарнирного соединения упомянутой панели.
В соответствии с другой существенной характеристикой предлагаемого изобретения приведение в движение упомянутых шарнирных панелей и/или стабилизаторов пламени осуществляется системой гидравлических цилиндров или других аналогичных средств, управляемых при помощи бортового компьютера данного летательного аппарата в функции сигналов, поступающих от специального устройства, обеспечивающего измерение некоторого параметра, связанного тем или иным образом со скоростью полета.
В предпочтительном варианте реализации упомянутое измерительное устройство содержит по меньшей мере один датчик величины тяги и/или средства измерения статического давления, расположенные в камере сгорания.
Кроме того, сама камера сгорания разделена на зону диффузии, где начинается сверхзвуковое горение, и зону камеры позади стабилизаторов пламени, имеющих возможность убираться из проходного канала данной камеры сгорания, где происходит дозвуковое горение и где завершается сверхзвуковое горение.
Кроме того, форсунки или инжекторы топлива могут быть расположены непосредственно на входе или во входной части камеры сгорания по продольной оси этой камеры и на уровне входа окислителя, обеспечивая таким образом соответствующее распределение топлива по всему каналу двигателя, тогда как устройство воспламенения или запальное устройство в предпочтительном варианте реализации предусмотрено внутри упомянутой камеры сгорания.
В то же время, предпочтительным является вариант, в соответствии с которым в качестве топлива на относительно малых скоростях полета мог бы использоваться керосин, а в качестве топлива на более высоких скоростях полета использовался бы водород.
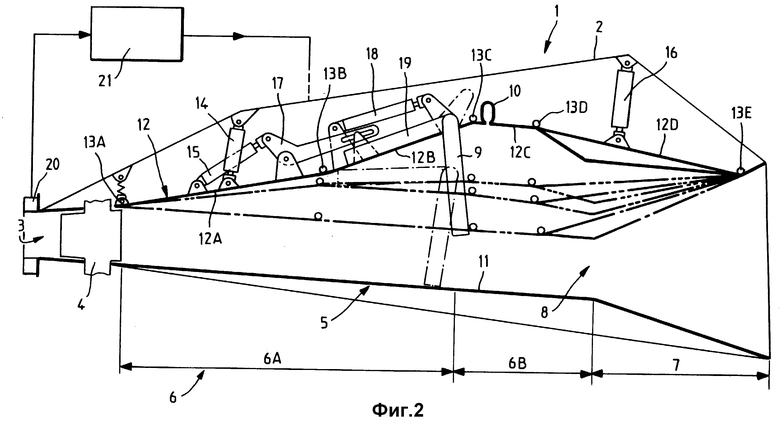
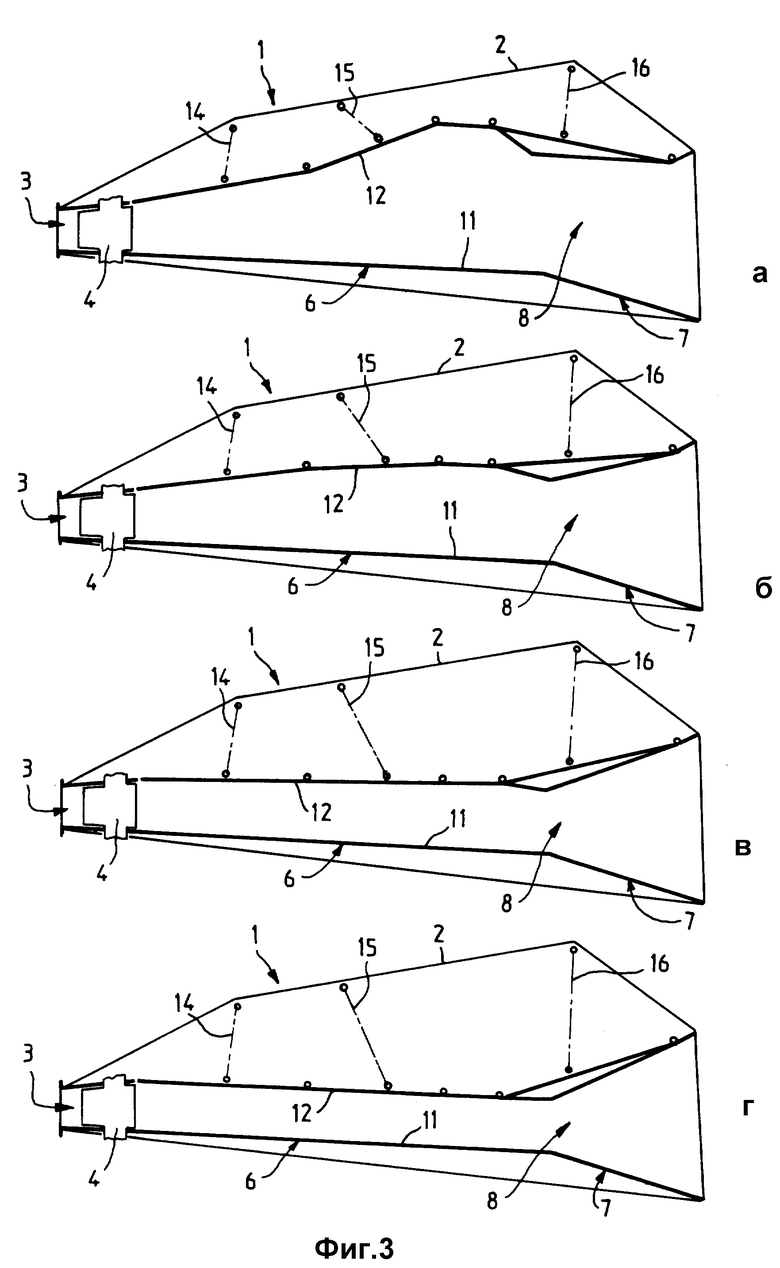
На фиг. 1 представлен схематический перспективный вид примера практической реализации прямоточного воздушно-реактивного двигателя, выполненного в соответствии с предлагаемым изобретением; на фиг. 2 - схематический продольный разрез прямоточного воздушно-реактивного двигателя, показанного на фиг. 1; на фиг.3 - различные конфигурации прямоточного воздушно-реактивного двигателя, схематически представленного на фиг. 1 и 2, соответствующие различным используемым областям скоростей полета.
Прямоточный воздушно-реактивный двигатель 1, выполненный в соответствии с предлагаемым изобретением и схематически представленный на приведенных чертежах, предназначен для использования на летательных аппаратах со сверхзвуковой и/или гиперзвуковой скоростью полета и рассчитан на функционирование в весьма широком диапазоне скоростей, то есть в диапазоне от скоростей, соответствующих числу Маха от 1 до 2, и до скоростей, соответствующих числу Маха от 15 до 20.
В своем кожухе или оболочке 2 данный прямоточный воздушно-реактивный двигатель 1 содержит вход для окислителя 3, в частности воздухозаборник, располагающийся на входе данного двигателя и устанавливаемый под фюзеляжем того летательного аппарата, на котором используется данный двигатель; инжекторы топлива 4, предусмотренные непосредственно на входе корпуса 5 данного прямоточного воздушно-реактивного двигателя; при этом упомянутый корпус 5 может быть условно разделен, как это хорошо видно на фиг. 2, на зону камеры сгорания 6 и зону реактивного сопла 7, между которыми можно выделить, как это будет более подробно описано ниже, некоторую промежуточную или переходную зону (горловину или критическое сечение) 8, определяемую изменяемой сходящейся и расходящейся геометрией, меняющейся автоматически в функции скорости полета, то есть фактического числа Маха, при функционировании данного прямоточного воздушно-реактивного двигателя в соответствии с предлагаемым изобретением.
В то же время, сама камера сгорания 6 как таковая подразделяется на зону диффузии 6A, где начинается сверхзвуковое горение, и зону собственно камеры 6B, где позади стабилизаторов пламени происходит дозвуковое горение и где завершается сверхзвуковое горение, причем упомянутые выше инжекторы 4 обеспечивают распределение топлива во всем объеме потока. Устройство зажигания 10 (фиг. 2) предусмотрено на уровне камеры 6B.
Здесь следует отметить, что в качестве топлива для данного прямоточного воздушно-реактиного двигателя можно рассматривать керосин для относительно небольших скоростей полета (то есть до скоростей, примерно соответствующих числу Маха 8, и с возможным барботированием водорода таким образом, чтобы облегчить запуск данного прямоточного воздушно-реактивного двигателя), а затем, на более высоких скоростях полета, водород. Другие виды топлива, такие как, например, метан, эндотермические углеводороды, синтетические виды топлива для ракетных двигателей, также могут быть использованы для двигателя этого типа.
В представленном на приведенных чертежах и в данном описании практическом примере реализации предлагаемого изобретения корпус 5 данного прямоточного воздушно-реактивного двигателя имеет в целом форму канала прямоугольного поперечного сечения, образованного в целом четырьмя попарно противоположными друг другу стенками, из которых только нижние стенки 11 и верхние стенки 12 видны на приведенных чертежах. Из соображений большей ясности соответствующие боковые стенки на приведенных чертежах не показаны.
Для того чтобы обеспечить эволютивную или изменяемую геометрию, которая по существу и является объектом предлагаемого изобретения, верхняя стенка 12 корпуса данного прямоточного воздушно-реактивного двигателя образована специальными панелями 12A-12D, шарнирно связанными между собой и с концами упомянутой стенки 12 при помощи соответствующих осей 13A-13B, располагающихся поперечно по отношению к продольной оси данного прямоточного воздушно-реактивного двигателя, точнее к продольной оси его корпуса 5. Для того чтобы обеспечить возможность относительного шарнирного перемещения между различными панелями 12A-12D, некоторые из этих панелей, как это показано на фиг. 1, а именно панели 12A и 12C в приведенном здесь примере практической реализации предлагаемого изобретения, выполнены из двух частей, имеющих некоторую зону перекрытия 12A. 1 и 12C.1 (эти зоны перекрытия отдельных частей упомянутых выше панелей не показаны на фиг. 2).
Само собой разумеется, что такая конфигурация ни в коем случае не является ограничительной как в том, что касается стенки корпуса данного двигателя, выбранной в качестве "подвижной", так и в смысле количества панелей, которые образуют эту подвижную стенку данного прямоточного воздушно-реактивного двигателя. В частности, другая стенка или несколько стенок корпуса данного прямоточного воздушно-реактивного двигателя могут быть спроектированы таким образом, чтобы обеспечить упомянутую выше "подвижность" для решения поставленной в данном изобретении задачи.
Между тем, следует отметить специальную конструкцию панели 12, располагающейся со стороны реактивного сопла 7 и имеющей треугольное поперечное сечение. Это поперечное сечение имеет сначала сходящийся, а затем расходящийся профиль, вершина которого, обозначенная на фиг. 1 позицией 12D.1, ориентирована в направлении внутрь корпуса 5 данного прямоточного воздушно-реактивного двигателя, а две другие вершины соответствуют осям шарнирных соединений 13D и 13E. Такая конструкция связана с местоположением и с функцией, выполняемой упомянутой панелью, образующей по существу стенку реактивного сопла 7.
Упомянутая выше подвижность панелей 12A - 12D обеспечивается, как это хорошо видно на фиг. 2, при помощи некоторой совокупности силовых цилиндров, связанных с системой тяг и качалок (система 17, работающая совместно с силовым цилиндром 15). Аналогичным образом силовой цилиндр 18 обеспечивает позиционирование и в случае необходимости уборку (например, в полость 19) каждого стабилизатора пламени 9. Совокупность упомянутых силовых цилиндров и систем качалок и тяг не показана на фиг. 1 с тем, чтобы не затенять излишними подробностями общий вид данного прямоточного воздушно-реактивного двигателя.
Использование такого прямоточного воздушно-реактивного двигателя предполагает, что по мере получения соответствующих сигналов от измерительного устройства 20, которое осуществляет измерение силы тяги, представляющей собой линейную интегральную функцию оперативной или текущей эффективности действия данного прямоточного воздушно-реактивного двигателя, бортовой компьютер 21 данного летательного аппарата постоянно стремится обеспечить оптимальную конфигурацию переходной части или зоны камеры сгорания (корпус 5 данного прямоточного воздушно-реактивного двигателя) путем воздействия соответствующим образом на упомянутую систему управляющих силовых цилиндров 14, 15, 16, обеспечивающих перемещения шарнирных панелей 12A-12D, входящих в состав верхней стенки 12 корпуса данного двигателя.
В качестве упомянутого выше измерительного устройства можно рассматривать использование некоторого датчика силы тяги, определяющего величину продольного или осевого усилия, развиваемого данным прямоточным воздушно-реактивным двигателем в процессе его функционирования, то есть величину тяги этого двигателя. Упомянутая величина тяги данного двигателя определяется эффективностью оперативных процессов, а именно эффективностью сгорания топлива и коэффициентом восстановления полного давления (эта величина является функцией полных гидравлических потерь в данном прямоточном воздушно-реактивном двигателе). Величина двух этих параметров зависят определенным образом от геометрии переходной части корпуса данного двигателя (в каждой точке траектории) и от эффективности средств стабилизации (стабилизаторы пламени 9), которая по существу также зависит от управления геометрией проходного канала данного двигателя.
Соответствующие сигналы регулирования (поступающие от упомянутого бортового компьютера 21) воздействуют на систему управления таким образом, чтобы обеспечить максимально благоприятные характеристики данного двигателя, исходя, главным образом, из нескольких достаточно точных измерений различных параметров, разумным образом предусмотренных для данного двигателя, а также из различной другой информации, поступающей в упомянутый бортовой компьютер (расход топлива, скорость полета данного летательного аппарата, например). Действительно, датчик величины тяги рассматриваемого двигателя всегда оказывается полезным как в процессе наземной отработки и регулировки на испытательном стенде, так и в реальном полете. Информация с такого датчика позволяет количественно оценить эффективность осуществляемого регулирования геометрии данного прямоточного воздушно-реактивного двигателя, направленную на достижение максимально возможных тяговых характеристик в заданных условиях полета.
При скоростях полета летательного аппарата, оборудованного таким прямоточным воздушно-реактивным двигателем, в диапазоне, соответствующем значениям числа Маха от 1 или 2 и до примерно 6, камера сгорания данного двигателя работает в режиме дозвукового горения, соответствующем расширению или разведению стабилизаторов 9 пламени, установленных в диффузоре или расширяющейся переходной части упомянутой камеры сгорания, модифицируя соответствующим образом геометрию упомянутой переходной части в зависимости от управляющих команд, поступающих от бортового компьютера 21, который принимает и обрабатывает по определенному алгоритму сигналы, поступающие с датчика величины тяги 20.
Камера сгорания имеет максимальное поперечное проходное сечение именно в режиме дозвукового горения, соответствующего полету со скоростями, эквивалентными значениям числа Маха от 1 до 2 (это состояние данного прямоточного воздушно-реактивного двигателя в соответствии с предлагаемым изобретением схематически представлено на фиг. 3a). Упомянутая максимальная величина проходного сечения камеры сгорания постепенно уменьшается по мере увеличения скорости полета вплоть до достижения величины числа Маха, примерно равного 6 (как это показано на фиг.3б), путем "приближения" шарнирных панелей 12A-12D подвижной стенки 12 к противоположной ей стенке 11 корпуса данного прямоточного воздушно-реактивного двигателя при сохранении на данном этапе общего характера геометрии горловины или критического сечения (сужающийся участок, за которым следует расширяющийся участок) в переходной зоне между камерой сгорания и реактивным соплом.
Упомянутые стабилизаторы пламени 9 определенным образом тормозят или сдерживают сверхзвуковой поток и прямой скачок уплотнения или система эквивалентных скачков устанавливаются между этими стабилизаторами пламени и инжекторами 4 (то есть в диффузоре), и после этого скачка уплотнения поток становится дозвуковым. Топливо, поступающее из инжекторов, подается в поток окислителя или захваченного воздухозаборником воздуха, приводится в действие устройство зажигания 10 и происходит воспламенение полученной таким образом топливовоздушной смеси. За упомянутыми стабилизаторами пламени газ завихряется и пламя становится стабильным, то есть появляются зоны стабилизации. Эти зоны стабильного горения благоприятствуют процессу нормального сгорания в камере.
Позиционирование инжекторов топлива, как это показано на приведенных чертежах, на входе в камеру сгорания позволяет равномерно распределить топливо в потоке воздуха, являющегося в данном случае окислителем, и обеспечить распад на достаточно мелкие элементы струек топлива, гарантируя при этом определенное повышение давления в камере сгорания, в зоне, где осуществляется управление геометрией переходной части корпуса данного прямоточного воздушно-реактивного двигателя. Установка упомянутых инжекторов топлива в зоне управления геометрией корпуса существенно усложнит или даже в некоторых условиях сделает невозможным повышение давления в камере сгорания.
Как уже было указано выше, в том случае когда скорость полета летательного аппарата, использующего предлагаемый прямоточный воздушно-реактивный двигатель, возрастает, объем проходной части и объем зоны перехода между камерой сгорания и реактивным соплом (горловина 8) уменьшаются. Когда скорость полета превышает некоторую величину, примерно соответствующую числу Маха 6, необходимо предусмотреть переход к сверхзвуковому горению в камере сгорания. Для достижения этой цели упомянутые стабилизаторы 9 пламени полностью убираются из потока и горловина как таковая (участок между сходящейся и расходящейся частями переходной зоны) практически исчезает при сохранении одинакового или постоянного по ходу потока сечения переходной части камеры сгорания, соединяющейся непосредственно с расширяющимся реактивным соплом 7 (фиг. 3). В этом случае прямой скачок уплотнения трансформируется в систему косых скачков уплотнения и горение стабилизируется после того, как упомянутые косые скачки уплотнения сыграют свою роль стабилизаторов горения. Принимая соответствующие сигналы от датчика 20 величины тяги, бортовой компьютер 21 выдает соответствующие управляющие команды на изменение геометрических форм корпуса 5 данного прямоточного воздушно-реактивного двигателя в соответствии с максимальной тягой.
Действительно, геометрия, характеризуемая постоянной величиной поперечного сечения переходной части камеры сгорания, о которой было сказано выше, может быть использована только после пропадания опасности тепловой блокировки двигателя (то есть при скоростях полета, которым соответствуют величины числа Маха, превышающие примерно 7 или 8 единиц). В области некоторых промежуточных скоростей (число Маха примерно от 6 до 7) между конфигурациями, соответствующими фиг. 3б и 3г, используется конфигурация с убирающейся горловиной, которая должна быть расширяющейся в достаточной степени для того, чтобы функционировать в условиях сверхзвукового горения без риска тепловой блокировки данного двигателя (см. фиг. 3в).
Прямоточный воздушно-реактивный двигатель для летательного аппарата со сверхзвуковой и/или гиперзвуковой скоростью полета содержит камеру сгорания с переменной геометрией для осуществления смешивания топлива с окислителем и приготовления таким образом подлежащей сжиганию горючей смеси и реактивное сопло для отведения в атмосферу газов, выходящих из камеры сгорания. Камера сгорания образована зоной корпуса двигателя, имеющего в окрестностях переходной зоны между камерой сгорания и реактивным соплом эволютивную или изменяемую геометрию, меняющуюся в зависимости от числа Маха. Такое выполнение двигателя приводит к расширению его диапазона функционирования при сохранении максимальной эффективности во всем этом диапазоне. 9 з.п.ф-лы, 3 ил.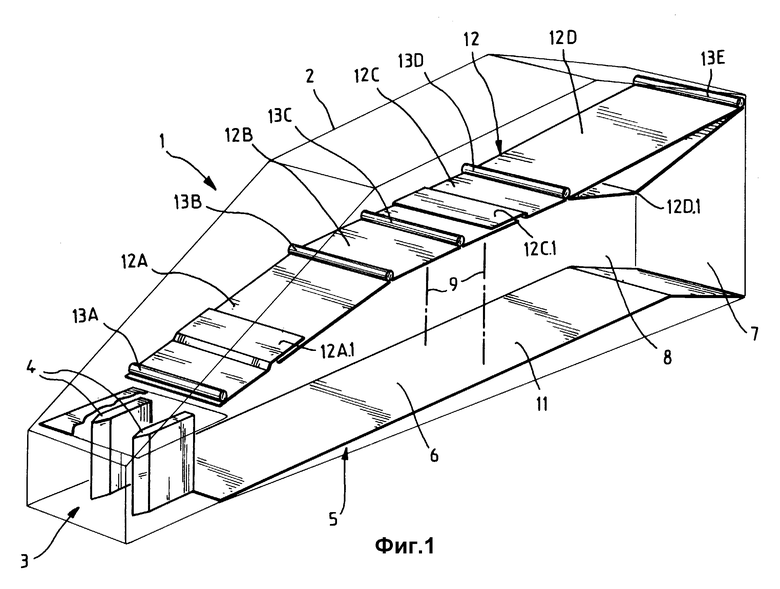
| US 5081831 A, 21.01.92 | |||
| Реактивный авиационный двигатель внутреннего горения | 1924 |
|
SU12993A1 |
| Ракетно-винтовой двигатель для стратосферных самолётов | 1939 |
|
SU61582A1 |
| US 5072581 A, 17.12.91 | |||
| US 4821512 A, 18.04.88. | |||
