Изобретение относится к способам пеленгации летательных аппаратов (ЛА) с помощью радиотехнических средств и может быть использовано для определения местоположения самолета или другого подвижного объекта в зоне ближней навигации, а также при посадке и взлете. Широко известен радиопеленгаторный способ определения положения самолетов (см. Белоцерковский Г. Б. Основы радиолокации и радиолокационные устройства. - М.: Сов. радио, 1975. - С.290-292), основанный на пеленгации подвижных объектов с помощью наземных радиолокаторов. Для возможности определения местоположения самолета по информации наземного локатора необходима линия связи радиолокатор - самолет, что затрудняет использование данного способа в системах управления воздушным движением с высокой интенсивностью.
В настоящее время большой интерес представляет решение задачи определения углового положения ЛА посредством временного способа (см. Беляевский Л. С., Новиков В. С., Оленюк П. В. Основы радиопеленгации. - М.: Транспорт, 1982. - С. 114-119), основанного на измерении промежутка времени между импульсами, передаваемыми с помощью сканирующего излучателя при определенном угловом положении последнего. Точность названного способа зависит от точности измерения промежутка времени и скорости движения ЛА в направлении, перпендикулярном лучу. По этой причине системы, реализующие данный способ, используются, как правило, для определения углового положения объектов, движущихся в радиальном направлении относительно пункта радионавигации. Для определения местоположения быстроперемещающихся ЛА такие системы практически не пригодны.
Помимо названных, известен также амплитудный способ углометрии, описанный в книге Духон Ю. И., Ильинский Н. Н., Средства управления летательными аппаратами. - М.: Воениздат, 1972 - С.332-334, выбранный в качестве прототипа. Способ основан на сравнении сигналов с разной частотой амплитудной модуляции, передаваемых двумя неподвижными излучателями с пересекающимися в заданном направлении диаграммами.
При осуществлении указанного способа за счет поочередного излучения сигналов в пределах каждой диаграммы направленности создается равносигнальная зона, которая определяет линию курса. С помощью бортового приемоиндикатора осуществляют прием, детектирование и последующее выделение низкочастотных составляющих. Об отклонении ЛА относительно равносигнального направления судят по величине и знаку разностного тока, протекающего по нагрузке частотного дискриминатора. Система, обеспечивающая реализацию описанного способа, позволяет определить направление отклонения ЛА от линии курса, однако, величина отклонения при этом измеряется грубо, с большими погрешностями, а измерения могут осуществляться только в части сектора, ограниченной диаграммой направленности излучателя.
Основным недостатком способа-прототипа является неудовлетворительная точность определения пеленга ЛА.
Задачей заявленного изобретения является повышение точности определения пеленга (местоположения) ЛА.
Указанная задача решается за счет того, что в способе радиопеленгации ЛА, основанном на определении угловых координат летательного аппарата посредством измерения на его борту параметров передаваемого с наземного пункта радиопеленгации сигнала, частота модуляции которого поставлена в однозначное соответствие направлению излучения, осуществляют частотную модуляцию сигнала, передаваемого с наземного пункта радиопеленгации, путем гетеродинирования преобразуют частоту сигнала, принятого на борту летательного аппарата, измеряют частоту его модуляции, пеленг летательного аппарата вычисляют, умножая полученное значение частоты модуляции сигнала на коэффициент, определяющий соответствие между направлением излучения сигнала и частотой модуляции сигнала. Изменение направления излучения в пространстве осуществляют путем вращения излучающей антенны.
Благодаря определению пеленга ЛА в любой точке сектора по измеренному значению частоты, появляется возможность сужения диаграммы направленности антенны (ДНА) в азимутальной плоскости без сокращения угловых размеров сектора пеленгации, который может быть даже круговым. Кроме того, в зависимости от направления захода (разворота) самолета на посадку его угловое перемещение относительно наземного пункта радиопеленгации может совпадать с вращением антенны или быть встречным. Очевидно, что в первом случае ДНА будет несколько "растянутой" в пространстве, а во втором случае "сжатой". Дополнительный эффект сжатия ДНА также предлагается использовать для повышения точности определения пеленга ЛА. Для этого предусмотрено изменение направления вращения антенны, которое задают в зависимости от расположения траектории движения ЛА путем реверсирования двигателя привода.
Технический результат изобретения заключается в осуществлении пеленгации (определения местоположения) ЛА с повышенной точностью за счет сужения ДНА, а также благодаря лучшей помехозащищенности системы пеленгации, в которой используется частотная модуляция. Кроме того, увеличивается сектор пеленгации, что обусловлено вращением излучающей антенны.
Возможный вариант практического осуществления предложенного способа поясняется с помощью чертежей.
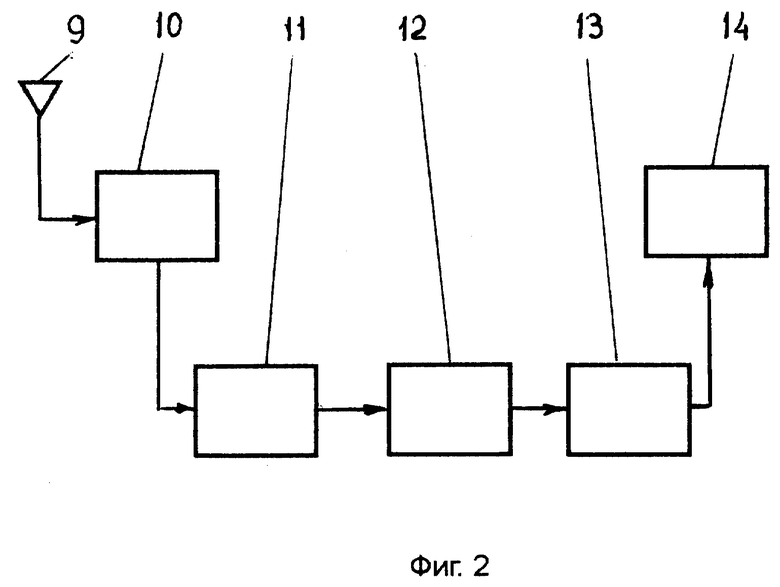
На фиг. 1 представлена блок-схема пункта радиопеленгации, расположенного на земле.
На фиг. 2 изображена функциональная схема измерительного устройства, размещенного на борту ЛА.
В соответствии с фиг. 1 пункт радиопеленгации содержит излучающую антенну 1, которая установлена на оси 2 с возможностью вращения в азимутальной плоскости; связанные с осью 2 привод 3 и датчик 4 угла поворота антенны, подключенный к модулятору 5, соединенному с задающим генератором 6 и усилителем мощности 7, к которому подключена антенна 1; блок переключения (БП) 8 направления вращения излучающей антенны 1, к выходу которого подключен двигатель привода 3. Измерительное устройство согласно фиг. 2 содержит бортовую антенну 9, соединенную с преобразователем-усилителем 10, выход которого подключен к частотному детектору (ЧД) 11, с которым связан частотомер 12, выход которого соединен с вычислителем 13, связанным с потребителем 14 информации.
Отражатель излучающей антенны 1 выполнен в виде усеченного параболоида. Поперечное сечение ДНА представляет собой вытянутый эллипс, большая ось которого ориентирована в вертикальной плоскости, а малая - в азимутальной плоскости.
В качестве двигателя привода 3 используется электродвигатель постоянного тока с независимым возбуждением. БП 8 содержит переключатель полярности напряжения, подводимого к указанному электродвигателю.
Преобразователь-усилитель 10 выполнен по схеме, включающей гетеродин, смеситель сигналов и усилитель преобразованного сигнала, соединенный с выходом смесителя.
Другие элементы наземного и бортовых устройств широко известны и их практическая реализация не вызывает затруднений.
В процессе осуществления способа радиопеленгации ЛА излучающую антенну 1 приводят во вращательное движение приводом 3, относительно вертикальной оси 2. Использование в качестве отражателя излучающей антенны 1 усеченного параболоида обеспечивает сжатие ДНА в горизонтальной плоскости. При повороте антенны 1 изменяется напряжение, снимаемое с датчика 4 угла. В зависимости от изменения названного напряжения, подаваемого на модулятор 5, изменяется частота угловой модуляции высокочастотных колебаний задающего генератора 6 по закону
F = Kϕ • ϕ,
где Kϕ - коэффициент пропорциональности;
ϕ - текущее значение угла поворота антенны.
Соответственно изменяются параметры сигнала на входе усилителя мощности 7 и излучения. Высокочастотные электромагнитные колебания принимают на ЛА с помощью бортовой антенны 9 измерительного устройства. В случае необходимости доплеровский сдвиг несущей частоты, вызванный перемещением ЛА относительно передатчика, компенсируют за счет автоматической подстройки частоты гетеродина преобразователя-усилителя 10, как это осуществляется в известных радиотехнических системах (см. Радиотехнические цепи и сигналы. /Д.В. Васильев и др.; под. ред. К. А. Самойло - М.: Радио и связь, 1982 - С.387-395).
При непрерывной работе наземного пункта радиопеленгации сигнал, принимаемый на борту ЛА, имеет периодический характер. Огибающая сигнала на входе преобразователя-усилителя 10 определяется диаграммой направленности антенны 1, а также скоростью ее углового перемещения.
В усилителе-преобразователе 10 осуществляют преобразование (понижение) частоты сигнала путем его гетеродинирования. Необходимость понижения частоты принятого сигнала обусловлена тем, что для получения узкой диаграммы направленности антенны 1 колебания, излучаемые антенной, должны иметь достаточно высокую частоту. (Целесообразно использовать частоты сантиметрового или миллиметрового диапазона). После преобразования и усиления сигнал подают на ЧД 11, где осуществляют его детектирование. С помощью частотомера 12 измеряют значение частоты модуляции, которое подается на вычислитель 13. Очевидно, что сигнал на выходе ЧД 11 будет только в те моменты времени, когда направление излучения совпадает с пеленгом на ЛА. Пеленг ЛА определяют на основании соответствия между частотой модуляции и направлением излучения (1), используя следующее выражение
П = K
где Fи - измеренное значение частоты;
П0 - начальное значение пеленга, зависящее от ориентации наземного пункта радиопеленгации относительно направления на север.
Вычисленное значение пеленга поступает к потребителю 14 информации.
В случае необходимости при изменении траектории подхода ЛА к посадочной полосе изменяют направление вращения излучающей антенны, используя БП 8. При этом обеспечивается встречное угловое движение ЛА относительно вращающейся антенны.
Применение вращающейся антенны с узкой диаграммой направленности и осуществление ее вращения в направлении, противоположном движению ЛА, использование частотной модуляции позволяют повысить точность пеленгации и обеспечить измерение пеленга ЛА независимо от его местоположения относительно пункта радиопеленгации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАДИОЛОКАЦИИ ПАССИВНЫХ КОСМИЧЕСКИХ ОБЪЕКТОВ | 2000 |
|
RU2175139C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО НА ЕГО ОСНОВЕ | 2004 |
|
RU2267797C2 |
| Способ определения координат летательного аппарата относительно взлётно-посадочной полосы | 2016 |
|
RU2620587C1 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1999 |
|
RU2173864C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ВЫСОКОТОЧНОГО ОДНОЭТАПНОГО ПЕЛЕНГАТОРА И АДРЕСНО-ОТВЕТНОЙ ПАКЕТНОЙ ЦИФРОВОЙ РАДИОЛИНИИ В ДКМВ ДИАПАЗОНЕ | 2016 |
|
RU2613369C1 |
| АППАРАТ ДЛЯ ОБРАБОТКИ ДИСПЕРСНЫХ МАТЕРИАЛОВ В ПСЕВДООЖИЖЕННОМ СЛОЕ | 2001 |
|
RU2181621C1 |
| КРЫЛО ГИПЕРЗВУКОВОГО ЛЕТАТЕЛЬНОГО АППАРАТА В УСЛОВИЯХ ЕГО АЭРОДИНАМИЧЕСКОГО НАГРЕВА | 2009 |
|
RU2430857C2 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОБЪЕКТА | 2005 |
|
RU2285933C1 |
| Система пассивной локации для определения координат летательного аппарата в ближней зоне аэродрома и на этапе захода на посадку с резервным каналом определения дальности | 2016 |
|
RU2633380C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОБЪЕКТА | 2005 |
|
RU2282867C1 |
Изобретение относится к способам радиопеленгации летательных аппаратов (ЛА) с помощью радиотехнических средств и может быть использовано для определения местоположения самолета или другого подвижного объекта в зоне ближней навигации, а также при посадке и взлете. Изобретение позволяет повысить точность пеленгации ЛА, что является достигаемым техническим результатом. В способе радиопеленгации ЛА, основанном на определении угловых координат летательного аппарата посредством измерения на его борту параметров передаваемого с наземного пункта радиопеленгации сигнала, частота модуляции которого поставлена в однозначное соответствие направлению излучения, осуществляют частоту модуляцию сигнала, передаваемого с наземного пункта радиопеленгации, путем гетеродинирования преобразуют частоту сигнала, принятого на борту ЛА, измеряют частоту его модуляции, пеленг ЛА вычисляют, умножая полученное значение частоты модуляции сигнала на коэффициент, определяющий соответствие между направлением излучения сигнала и частотой модуляции сигнала, при этом в пределах сектора пеленгации изменяют направление излучения в пространстве путем вращения излучающей антенны, вращение которой осуществляют в направлении, противоположном угловому перемещению летательного аппарата относительно наземного пункта радиопеленгации. 2 з.п. ф-лы, 2 ил.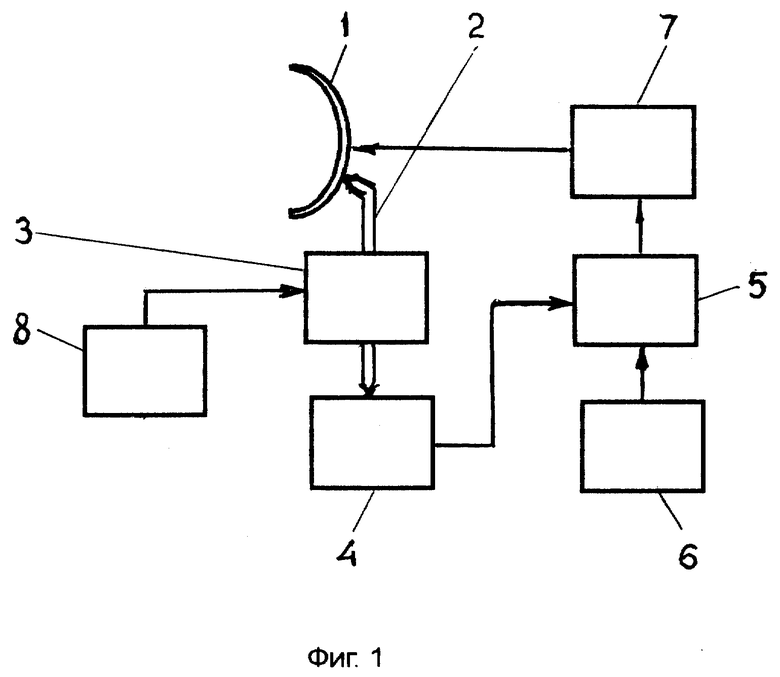
| ДУХОН Ю.И., ИЛЬИНСКИЙ Н.Н | |||
| Средства управления летательными аппаратами | |||
| - М.: Воениздат, 1972, с.332-334 | |||
| RU 2059973 C1, 10.05.1996 | |||
| US 3761931, 25.09.1973 | |||
| US 4167735, 11.09.1979 | |||
| Способ хирургического лечения пациентов с сочетанной патологией почек, надпочечников и желчного пузыря | 2019 |
|
RU2720402C1 |
