Изобретение относится к радиотехнике, а именно к методам и системам пассивной радиолокации, и может быть использовано для определения местоположения в трехмерном пространстве источника радиоизлучения (ИРИ), размещенного на летательном аппарате (ЛА) (самолет, вертолет и т.п.), за счет приема и последующей обработки электромагнитных волн, порожденных этим ИРИ.
Изобретение используется для решения технической задачи, состоящей в определении координат летательного аппарата в ближней зоне аэродрома и на этапе его захода на посадку в целях наблюдения за ним и контроля его движения наземными службами, а также в целях его навигационного сопровождения. Достигаемый технический результат состоит в повышении точности оценки координат подвижного объекта, оснащенного источником радиоизлучения.
Бортовые радиотехнические средства летательных аппаратов (ЛА) при выполнении задач создают активные электромагнитные поля искусственного происхождения в диапазоне частот от 1 МГц до 40 ГГц. Кроме активных полей ЛА, создают собственные электромагнитные излучения. Данный спектр излучения может быть использован для решения задачи обнаружения, пеленгации и определения координат ЛА.
При построении многопозиционного пассивного радара используется разностно-дальномерный метод, основанный на измерении разности хода сигнала от цели до приемных антенн радара. Этот метод позволяет работать по импульсным и непрерывным сигналам, в том числе по шумовым и шумоподобным.
Принципиальные особенности метода заключаются в синхронном способе приема сигналов от излучающего источника на разнесенных антеннах. Высокая точность определения координат ЛА обеспечивается за счет корреляционной обработки сигналов, при которой вид принятого сигнала не имеет значения. Определение координат источника осуществляется по разности прихода сигналов на каждую из позиций, а сама разность прихода сигнала к одной позиции относительно другой определяется из положения максимума взаимно-корреляционной функции сигналов от этих позиций.
Наиболее близким техническим решением, отвечающим требованиям пассивного обнаружения и пеленгации, является устройство, описанное в статье «Одноэтапное оценивание местоположения источника радиоизлучения пассивной системой, состоящей из узкобазовых подсистем» (ж. Радиотехника и электроника, том 49, №2, 2004 г., стр. 156-170) - прототип.
Данное устройство содержит N приемных антенн, первый и второй аналого-цифровой преобразователь (АЦП) и вычислитель.
Цель изобретения - управление ЛА на предельно малых высотах в ближней зоне аэродрома и вывод ЛА в точку захода на посадку.
Результат достигается централизованной обработкой сигналов, полученных в результате приема электромагнитных колебаний в точках, размещение которых в пространстве определяется оптимальной группировкой слабонаправленных антенных элементов внутри структурных блоков, реализованных отдельными техническими средствами распределенного комплекса.
Поставленная цель достигается тем, что в систему, содержащую три узкобазовых подсистемы (УП), каждая из которых содержит N приемных антенн, первый и второй аналого-цифровой преобразователь (АЦП), центральную электронно-вычислительную машину (ЦЭВМ) дополнительно введены малошумящий усилитель (МШУ), N входов которого соединены с N приемными антеннами, первый и второй многоканальные синхронные квадратурные приемники (МСКП), входы которых соединены соответственно с первым и вторым выходами малошумящего усилителя, а выходы - с первыми входами первого и второго аналого-цифровых преобразователей, первый и второй каналы обработки информации, первые входы которых соединены с выходами аналого-цифровых преобразователей, а выходы подключены к ЦЭВМ; управляющий контроллер, подключенный по входу к ЦЭВМ, первый выход которого подключен ко второму входу первого многоканального синхронного квадратурного приемника, ко второму входу первого аналого-цифрового преобразователя и ко второму входу первого канала обработки информации, а второй выход - ко второму входу второго многоканального синхронного квадратурного приемника, ко второму входу второго аналого-цифрового преобразователя и ко второму входу второго канала обработки информации; центральный пункт обработки (ЦПО), в состав которого входят 3 порта ввода информации, каждый вход которого соединен через гибридную оптико-коаксиальную сеть с выходом ЦЭВМ каждой узкобазовой подсистемы (УП), блок клавиатуры, блок индикации, блок вычисления текущей скорости ЛА, блок вычисления текущей высоты полета ЛА, блок вычисления дальности до ЛА, оперативное запоминающее устройство (ОЗУ), постоянное запоминающее устройство (ПЗУ), первый дополнительный порт вывода, микропроцессор, объединенные между собой шиной адреса и данных, радиомодем диапазона ДКМВ, вход которого соединен с выходом первого дополнительного порта вывода, а выход является общим выходом системы, обеспечивающим радиосвязь с ЛА.
Сравнение с прототипом показывает, что заявляемая система отличается наличием новых блоков и их связями между ними. Таким образом, заявляемая система соответствует критерию «новизна».
Сравнение заявляемого решения с другими техническими решениями показывает, что перечисленные элементы, используемые в блоках, являются известными, однако их введение в указанной связи с остальными элементами приводит к расширению функциональных возможностей устройства.
Это подтверждает соответствие технического решения критерию «существенные отличия».
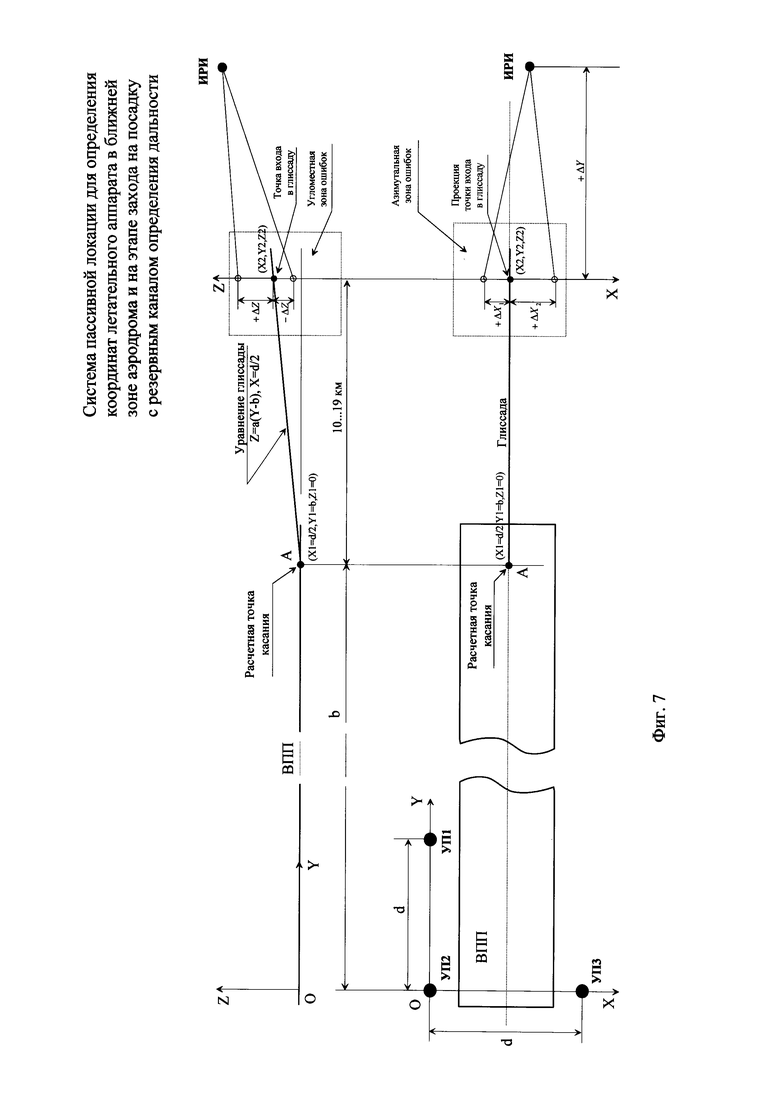
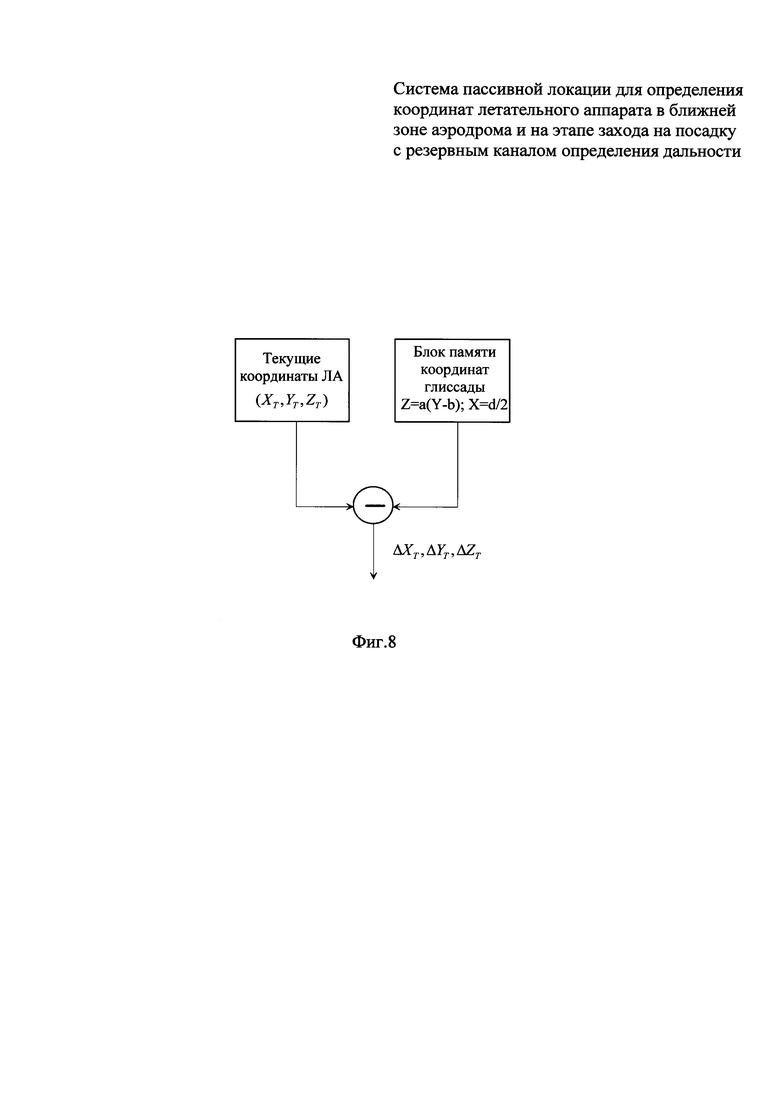
На фиг. 1, 2 представлена общая схема предлагаемой системы пассивной локации для определения координат ЛА в ближней зоне аэродрома и при заходе на посадку, на фиг. 3 - структура центрального пункта обработки (ЦПО), на фиг. 4 - структура узкобазовой подсистемы (УП), на фиг. 5 - структура канала обработки информации, на фиг. 6 - выбор системы координат, на фиг. 7 - пояснения к получению корректирующих отклонений (±ΔX, ±ΔY, ±ΔZ) эталонных значений высоты Z и азимута (X, Y) ЛА в ближней зоне аэродрома и при заходе на посадку, на фиг. 8 - блок-схема алгоритма получения корректирующих отклонений ΔXT, ΔYT, ΔZT.
Система включает (фиг. 2):
- 3 узкобазовых подсистемы (УП) II (фиг. 4) в составе: антенно-фидерная система (АФС) II-1, малошумящий усилитель (МШУ) II-2, многоканальный синхронный квадратурный приемник (МСКП) II-3,4; аналого-цифровой преобразователь (АЦП) II-5,6; управляющий контролер II-9, ЦЭВМ II-10, канал обработки информации II-7,8, включающий фильтры 11, обнаружитель 12, пеленгатор 13, выходной формирователь 14,
- центральный пункт обработки (ЦПО) I (фиг. 3) в составе: первый, второй, третий порты ввода I-1,2,3; блок клавиатуры I-4, блок индикации I-5, регистратор I-6, микропроцессор I-7, первый дополнительный вывод I-8, блок вычисления текущей скорости ЛА I-9, блок вычисления текущей высоты полета ЛА I-10, оперативное запоминающее устройство (ОЗУ) I-11, постоянное запоминающее устройство (ПЗУ) I-12, шину адреса и данных I-13, радиомодем декаметрового диапазона радиоволн (ДКМВ) I-14, блок вычисления дальности до ЛА I-15,
- гибридную оптико-коаксиальную сеть III.
Система работает следующим образом.
Задача получения координат ЛА на малой высоте с помощью активных РЛС и радиотехнической системы ближней навигации (РСБН) решается только на высоте прямой видимости. При этом для всех радиодиапазонов, кроме ДКМВ, задача ближней навигации на высотах не ниже 500 м решается на дальности до 80-90 км, а на меньших высотах говорить о какой-либо навигации трудно. Дальность обнаружения можно вычислить, как  , где НЛА - высота полета ЛА.
, где НЛА - высота полета ЛА.
Если же использовать пеленгатор ДКМВ диапазона, аналогичный по принципу действия с существующей системой посадки, задача решается, за исключением получения достаточной точности пеленгации (не лучше 12 угловых минут по угловым параметрам).
В этом случае может быть рассмотрена следующая архитектура системы: на малых высотах и больших удалениях работает ДКМВ радиолиния, излучение которой пеленгуется тремя и более наземным пеленгаторами с фазированной антенной решеткой (ФАР) (либо одним без функции определения дальности до ЛА). Дальность до ЛА измеряется с помощью способа разделения функции приемной и передающей антенн в РЛС активного типа (либо дальность методом триангуляции трех позиций пеленгатора с ФАР). На наземном пункте управления вычисляются координаты ЛА и по радиолинии ДКМВ передаются на борт ЛА для навигации. В случае подхода ЛА в ближнюю зону аэродрома на прямую видимость (зону посадки) управление ЛА передается на УКВ радиолинию и включается контур оборудования посадки.
Точность определения угловых координат радиодиапазона ДКМВ зависит от раскрыва ФАР на земле, что существенно ограничено ее линейными размерами. Приемлемые габариты оборудования ФАР в пеленгаторе имеют линейные размеры в диаметре кольцевой решетки от 60 м до 200 м и точность определения угловых значений на источник излучения (переизлучения) 12 угловых минут. Увеличение размера ФАР требует больших площадей и возможно в принципе, но с практической точки зрения площади размещения не безграничны.
Исходя из этого имеем значительную ошибку при измерении дальности до ЛА с источником излучения.
Для уменьшения величины погрешности предлагается радиолокационный способ измерения дальности до ЛА, но с существенными изменениями принципа работы измерителя.
Как известно, для определения дальности до ЛА радиолокационным методом следует измерить задержку времени прихода отраженной волны от радиоконтрастной цели. По величине времени задержки оценивается дальность до цели. Это справедливо при условии размещения приемника и передатчика на одной направленной антенне и использовании временной синхронизации.
В данном случае мы имеем всенаправленный излучатель (ИРИ) на борту ЛА и высокоточный пеленгатор угловых параметров радиосигнала на земле.
Для обеспечения временной синхронизации работы приемного оборудования пеленгатора и всенаправленного излучателя на борту ЛА используется временная метка глобальной спутниковой навигации Глонасс-Навстар, то есть запуск приемника и передатчика синхронизированы во времени с точностью временной метки спутников.
Для разрешения неопределенности съема пеленга на источник излучения в пеленгаторе используется одноэтапный метод определения координат с известным временем периода работы вычислителя по угловым координатам.
В нашем случае время работы алгоритма для определения положения ЛА по азимуту и углу места занимает период от 20 до 75 мс.
Следовательно, если сигнал излучателя будет длительностью более 75 мс, то он в любом случае будет принят и по нему будут вычислены угловые параметры ЛА (цели).
Дальнейшее уточнение азимута и угла места от пеленгатора к измерителю дальности до ЛА позволяет применить приемник сигнала излучателя и измерить его задержку относительно момента запуска измерительного канала, синхронизированного от спутника.
Если не использовать спутниковую группировку для синхронизации, то в случае использования высокостабильного (10-10(11)) генератора на борту ЛА и в системе синхронизации пеленгатора, и измерителя дальности работа алгоритма аналогичная, за исключением наличия фазы установления связи в алгоритме радиомодема, который позволяет обеспечить индивидуальный сеанс связи с ЛА.
На практике имеется возможность управлять ИРИ вне зоны радиолокационного контроля, а в зоне радиосвязи с получением точной информации о местонахождении ЛА.
Важно, что при этом не принимаются и не передаются в сообщении с борта ЛА его координаты, измеренные спутниковыми системами навигации. Задачей и целью рассматриваемой системы является получение истинных координат ИРИ (ЛА) в момент его передачи сообщений. Тем самым система не подвержена навязыванию ложной информации, уводу спутниковой опорной системы от точки привязки и прочего, что возможно сотворить с сигналом спутника.
Положение измерителя невозможно вычислить, так как система пассивна, а излучение радиолинии в диапазоне ДКМВ имеет максимум направленности только в местонахождении ЛА.
Результат решаемой задачи достигается способом централизованной обработки сигналов, полученных в результате приема электромагнитных колебаний в точках, размещение которых в пространстве определяется оптимальной группировкой слабонаправленных антенных элементов внутри структурных блоков, реализованных отдельными техническими средствами распределенного пассивного радиолокационного комплекса, структурная схема которого представлена на фиг. 1. Комплекс состоит из нескольких (двух и более) узкобазовых подсистем (УП) (2), включающих в себя отдельные точки приема (ТП) (3), и центрального пункта обработки (ЦПО) (1), соединенными проводными или беспроводными линиями связи (ЛС) (5), обеспечивающими высокую скорость передачи информации, пропускная способность сети не менее 100 Мбит/с.
Источник радиоизлучения (ИРИ) (4) порождает электромагнитный сигнал, для описания которого используется модель гауссовского радиосигнала:

где K - число учитываемых составляющих,
ƒ0 - несущая частота,
ƒk - частоты учитываемых составляющих в спектре комплексной огибающей,
а k и bk - коэффициенты, являющиеся гауссовскими взаимно-независимыми случайными величинами.
Такой сигнал соответствует случаю стохастической модели, применение которой обеспечивает работу системы в условиях наименьшей доступной априорной информации.
Узкобазовая подсистема (УП) представляет собой технически единую приемную станцию, реализующую многоканальный прием в отдельных точках приема (ТП), размещение которых в структуре антенной системы УП удовлетворяет двум условиям:
1. Расстояние между ТП одной и той же УП намного меньше расстояния между УП и ИРИ. Данное условие обеспечивает плоский фронт волны.
2. Расстояние между ТП одной и той же УП не превышает половины длины волны λ0=c/ƒ0, соответствующей несущей, или центральной частоте принимаемого радиосигнала ƒ0, а под с понимается скорость распространения сигнала от ИРИ до УП, равная скорости света.
Структурная схема станции, реализующей УП1-3 (II), представлена на фиг. 2. УП состоит из антенно-фидерной системы (АФС) II-1, блока малошумящих усилителей (МШУ) II-2, многоканального синхронного квадратурного приемника (МСКП) II-3, 4, блока аналого-цифровых преобразователей (АЦП) II-5, 6, первого и второго каналов обработки информации II-7, 8, управляющего контроллера II-9 и ЦЭВМ II-10, соединенного линией связи (ЛС) 5 с ЦПО (I). Блок МШУ осуществляет предварительное усиление сигналов до его передачи на вход МСКП. Блоки МСКП, АЦП являются программно-управляемыми, режим работы которых задается управляющими сигналами ЦЭВМ II-10. При приеме электромагнитные колебания превращаются в аналоговый электрический радиосигнал, который поступает на вход МШУ, с выхода которого радиосигнал поступает на вход МСКП. В результате синхронного детектирования на выходе МСКП формируется аналоговый видеосигнал, поступающий в форме пар квадратур на вход АЦП, на выходе которого формируется цифровой сигнал в форме отсчетов.
Отличительными характеристиками МСКП являются центральная частота, перестраиваемая в широких пределах: от 20 МГц до 3 ГГц, и широкая полоса частот демодулируемого сигнала, составляющая величину до 60 МГц, что определяет сигнал как широкополосный в верхней части диапазона центральной частоты, и как сверхширокополосный в его нижней части. Для достижения требуемого качества приема независимое цифровое управление усилением каждого канала осуществляется с шагом 0,5 дБ, а синхронизация каждой пары каналов квадратурного приемника должна обеспечивать фазовое различие точность квадратур не более 2 градусов по абсолютной величине. Для получения технического результата применяется многоканальный 16-разрядный многоканальный АЦП с перестраиваемой частотой дискретизации, при этом максимальная частота составляет 100 МГц, что с учетом защитных интервалов согласуется с максимальной полосой принимаемого радиосигнала. Синхронность взятия отсчетов в различных каналах АЦП должна обеспечивать рассогласование моментов времени не более 0,05 от используемого периода дискретизации.
ЦЭВМ II-10 реализуется на основе высокопроизводительной многопроцессорной рабочей станции, оснащенной не менее чем двумя многоядерным универсальным процессорами класса Intel Xeon с рабочей частотой не менее 1,8 ГГц, и оперативным запоминающих устройством (ОЗУ), объемом не менее 8 ГБ. ЦЭВМ II-10 в структуре осуществляет функции управления работой УП1-3 (II) за счет задания функциональных режимов отдельных блоков. Кроме этого ЦЭВМ II-10 выполняет предварительную цифровую обработку принятых сигналов, а также их компрессию перед передачей по линии связи.
Антенная система УП1-3 (II) размещается на вертикальной мачте, высота которой составляет от 1,5 до 18 м. В верхней части мачты, на протяжении участка длины L, размещаются от одной до девяти кольцевых антенных подрешеток (КАПР). Минимальное расстояние между планарными КАПР составляет 0,5 м, что обуславливается технологическими особенностями крепления, а максимальное ограничено протяженностью рабочего участка мачты L.
Структурная организация распределенной приемной системы пассивного радиолокационного комплекса позволяет сформировать на приеме необходимое пространственное распределение электромагнитного поля сигнала, излученного ИРИ.
Пусть ИРИ расположен в точке пространства, координаты которой заданы вектором r=(X, Y, Z)Т. Тогда сигнал, принятый m-й ТП, состоящей в структуре n-й УП представляет собой сумму задержанного и взвешенного полезного сигнала и аддитивного шума:

где аn - амплитуда сигнала на входах ТП n-й УП;
τnm=τn+χn+ςnm;  - время прохождения сигнала от ИРИ до условного фазового центра (УФЦ) n-й УП;
- время прохождения сигнала от ИРИ до условного фазового центра (УФЦ) n-й УП;
 - координаты УФЦ n-й УП;
- координаты УФЦ n-й УП;
χn - ошибка привязки сигнала по времени;
ςnm=(rnm-rn)Tсα/с - время прохождения сигнала от УФЦ до ТП (от ТП до УФЦ, если ςnm<0);
 - координаты m-й ТП n-й УП;
- координаты m-й ТП n-й УП;

αn, βn - азимут и угол места луча, направленного из n-й УП на ИРИ;
с - скорость распространения сигнала.
Отличительное условие, обеспечивающее эффективное использование данной модели, состоит в том, что время наблюдения сигнала на каждой позиции должно быть выбрано много больше времен корреляции и сигнала и помехи. Цифровые отсчеты всех принятых сигналов передаются по высокоскоростным линиям связи в центр обработки данных, расположенный в структуре ЦПО. Цифровые сигналы, принятые отдельными ТП, рассматриваются совместно и формируют многомерный цифровой сигнал.
Оценка координат производится с использованием комбинированного угломерного и разностно-дальномерного способа оценивания, при котором вся распределенная система рассматривается как комбинированная пассивная система (КПС), сочетающую в себе общие черты широкобазовой пассивной системы (ШбПС) и пассивной системы, состоящей из узкобазовых подсистем (ПСУП). В основе метода оценивания такой системы лежит способ вычисления оценки разности прихода сигналов на основе корреляционного приема по методу максимального правдоподобия, который для двух точек приема представлен в зарубежной работе [2].
Угловые координаты ЛА по азимуту и углу места относительно точки центра масс носителя, определяются фазоразностным пеленгатором.
Дальность до ЛА определяется вычислительными методами по известным пеленгам и закону перемещения центра масс в относительной системе координат.
Функционально устройство состоит из пеленгатора 13 с цифровой антенной решеткой II-1, обнаружителя 12 частотно-временных признаков целей (классификатора целей), выходных формирователей 14 матриц координат целей и вычислителей II-9, 10, в которых функционируют алгоритмы экстраполяции траекторий ЛА, управляющие алгоритмы устройства и сетевые алгоритмы обмена данными и управления с радиотехнического комплекса.
Пеленгатор 13 с цифровой антенной решеткой II-1 состоит из фиксированной антенной решетки (приемные антенны 20…18000 МГц), размещенной на пространственно разнесенной точке приема.
Каждая из антенн подключена к входу МШУ II-2, который обеспечивает согласование импедансов антенного элемента и соединительного кабеля. Каждый выход МШУ II-2 подключен к своему приемному тракту, который образован одним из каналов многоканального синхронного квадратурного приемника (МСКП) II-3, 4 и аналого-цифровым преобразователем (АЦП) II-5, 6. Таким образом, сформирован индивидуальный цифровой канал отсчетов сигнала с одного элемента решетки.
АЦП II-5,6 сигнала одновременно выполняет выборку сигнала по множеству каналов. Размер этого множества определяется числом элементов антенной решетки II-1. Например, в зависимости от требований точности определения координат можно выбрать 16, 26 или 32 канала. Так, для решетки из 16 элементов потенциальная точность устройства составляет около 6 угловых минут. При увеличении числа элементов точность возрастает.
Когерентная обработка сигнала выполняется в фильтрах 11, обнаружителе 12 и пеленгаторе 13 канала обработки информации II-7, 8.
В силу необходимости обеспечения стабильности амплитудно-частотных характеристик (АЧХ) тракта пеленгации, в нем предусмотрены меры по измерению АЧХ перед снятием отсчетов сигнала в полосе рабочих частот. Периодичность контроля АЧХ связана со стабильностью электрических параметров канала и управляется по алгоритму контроля реперных (известных источников сигнала) в процессе работы от контроллера II-9.
Пеленгатор 13 обеспечивает определение угловых координат ЛА (источников радиоизлучения - ИРИ) по фазовому портрету пришедшего сигнала. Пеленгатором определяются углы прихода сигналов на антенную решетку с разных направлений на одной частоте и полосе частот. Число направлений задается требуемой точностью определения угловых координат. Для точности в 6 минут мгновенная матрица углов имеет размерность 3600 элементов. Время получения пеленга (квант времени решения задачи) зависит от быстродействия ЦЭВМ II-10.
Обработка информации осуществляется в ЦЭВМ II-10.
Предварительно заполняется матрица (азимут-угол места) по частотному диапазону, которая является неполной, без координаты дальности, которая получается расчетным способом по тригонометрическим уравнениям полета ЛА. Эта координата расчетная и она дополняет базу координат ИРИ до логического уровня.
Динамика работы
Многоканальный синхронный квадратурный приемник (МСКП) II-3, 4 работает в режиме пеленгации ЛА на одной частоте с одной из имеющихся полос.
Сигналы с выхода ЦЭВМ II-10 в цифровом виде поступают на обработку и выдаются в информационный комплекс.
С определенным темпом перестройки МСКП II-3, 4 по диапазону осуществляется наблюдение (локация) ИРИ и автоматическое определение их координат, с привязкой к моменту времени обнаружения.
Привязка по времени выполняется для разностно-дальномерного способа уточнения координат и решения специальных алгоритмов синтеза пространственно-временного разноса.
Таким образом, рассматриваемая система пассивного обнаружения источников радиоизлучения повышает точность определения координат ЛА в ближней зоне аэродрома и на этапе его захода на посадку в целях его навигационного сопровождения.
Список литературы
1. Авиационная радионавигация. Справочник под ред. Сосновского А.А., М.: Транспорт, 1990.
2. Knapp С.Н., Carter G.C., The Generalized Correlation Method for Estimation of Time Delay // IEEE Transactions on Acoustic, Speech and Signal Processing, 1976, vol. 24, no. 4, pp. 320-327.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНАЯ РАДИОЛИНИЯ ПЕРЕДАЧИ ДАННЫХ ДЕКАМЕТРОВОГО ДИАПАЗОНА РАДИОВОЛН | 2017 |
|
RU2658591C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО НЕЗАВИСИМОГО ВОЗДУШНОГО НАБЛЮДЕНИЯ В ДАЛЬНЕЙ ЗОНЕ НАВИГАЦИИ | 2017 |
|
RU2663182C1 |
| МНОГОПОЗИЦИОННЫЙ ПАССИВНЫЙ РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС, РЕАЛИЗУЮЩИЙ КОМБИНИРОВАННЫЙ ОДНОЭТАПНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА ЭТАПЕ ЗАХОДА НА ПОСАДКУ | 2015 |
|
RU2632922C2 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ВЫСОКОТОЧНОГО ОДНОЭТАПНОГО ПЕЛЕНГАТОРА И АДРЕСНО-ОТВЕТНОЙ ПАКЕТНОЙ ЦИФРОВОЙ РАДИОЛИНИИ В ДКМВ ДИАПАЗОНЕ | 2016 |
|
RU2613369C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ ПОДВОДНЫХ И НАДВОДНЫХ ОБЪЕКТОВ | 2017 |
|
RU2670176C1 |
| СИСТЕМА ДЕКАМЕТРОВОЙ СВЯЗИ ЧЕРЕЗ ИОНОСФЕРУ | 2017 |
|
RU2680312C1 |
| ОДНОЭТАПНЫЙ МЕТОД ПЕЛЕНГОВАНИЯ ИСТОЧНИКОВ ИЗЛУЧЕНИЯ В ДКМВ ДИАПАЗОНЕ С ПРИМЕНЕНИЕМ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ, СОСТОЯЩЕЙ ИЗ ВЗАИМНО ОРТОГОНАЛЬНЫХ СИММЕТРИЧНЫХ ГОРИЗОНТАЛЬНЫХ ВИБРАТОРОВ | 2016 |
|
RU2614035C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2005 |
|
RU2305851C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ С НАПРАВЛЕННОЙ АНТЕННОЙ | 2010 |
|
RU2444749C1 |
| Способ определения местоположения сканирующей РЛС пассивным многолучевым пеленгатором | 2016 |
|
RU2633962C1 |
Изобретение относится к радиотехнике, а именно к методам и системам пассивной радиолокации, и может быть использовано для определения местоположения в трехмерном пространстве источника радиоизлучения (ИРИ), размещенного на летательном аппарате (ЛА) (самолет, вертолет и т.п.), за счет приема и последующей обработки электромагнитных волн, порожденных этим ИРИ. Достигаемый технический результат – управление летательным аппаратом (ЛА) на предельно малых высотах в ближней зоне аэродрома и вывод ЛА в точку захода на посадку. Указанный результат достигается тем, что система содержит три узкобазовых подсистемы, каждая из которых содержит N приемных антенн, первый и второй аналого-цифровой преобразователь, центральную электронно-вычислительную машину, малошумящий усилитель, N входов которого соединены с N приемными антеннами, первый и второй многоканальные синхронные квадратурные приемники, входы которых соединены соответственно с первым и вторым выходами малошумящего усилителя, а выходы - с первыми входами первого и второго аналого-цифровых преобразователей, первый и второй каналы обработки информации, первые входы которых соединены с выходами аналого-цифровых преобразователей, а выходы подключены к центральной электронно-вычислительной машине; управляющий контроллер, подключенный по входу к центральной электронно-вычислительной машине, первый выход которого подключен ко второму входу первого многоканального синхронного квадратурного приемника, ко второму входу первого аналого-цифрового преобразователя и ко второму входу первого канала обработки информации, а второй выход - ко второму входу второго многоканального синхронного квадратурного приемника, ко второму входу второго аналого-цифрового преобразователя и ко второму входу второго канала обработки информации; центральный пункт обработки, в состав которого входят три порта ввода информации, каждый вход которого соединен через гибридную оптико-коаксиальную сеть с выходом центральной электронно-вычислительной машины каждой узкобазовой подсистемы, блок клавиатуры, блок индикации, блок вычисления текущей скорости ЛА, блок вычисления текущей высоты полета ЛА, блок вычисления дальности до ЛА, оперативное запоминающее устройство, постоянное запоминающее устройство, первый дополнительный порт вывода, микропроцессор, объединенные между собой шиной адреса и данных; радиомодем декаметрового диапазона радиоволн, вход которого соединен с выходом первого дополнительного порта вывода, а выход является общим выходом системы, обеспечивающим радиосвязь с ЛА. 8 ил.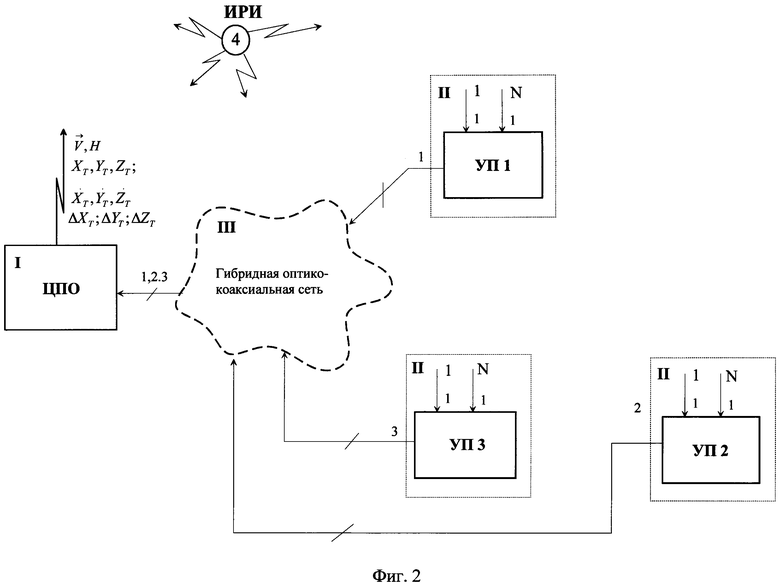
Система пассивной локации для определения координат летательного аппарата в ближней зоне аэродрома и на этапе захода на посадку, содержащая три узкобазовых подсистемы, каждая из которых содержит N приемных антенн, первый и второй аналого-цифровой преобразователь, центральную электронно-вычислительную машину, отличающаяся тем, что в каждую узкобазовую подсистему дополнительно введены малошумящий усилитель, N входов которого соединены с N приемными антеннами, первый и второй многоканальные синхронные квадратурные приемники, входы которых соединены соответственно с первым и вторым выходами малошумящего усилителя, а выходы - с первыми входами первого и второго аналого-цифровых преобразователей, первый и второй каналы обработки информации, первые входы которых соединены с выходами аналого-цифровых преобразователей, а выходы подключены к центральной электронно-вычислительной машине; управляющий контроллер, подключенный по входу к центральной электронно-вычислительной машине, первый выход которого подключен ко второму входу первого многоканального синхронного квадратурного приемника, ко второму входу первого аналого-цифрового преобразователя и ко второму входу первого канала обработки информации, а второй выход - ко второму входу второго многоканального синхронного квадратурного приемника, ко второму входу второго аналого-цифрового преобразователя и ко второму входу второго канала обработки информации; центральный пункт обработки, в состав которого входят три порта ввода информации, каждый вход которого соединен через гибридную оптико-коаксиальную сеть с выходом центральной электронно-вычислительной машины каждой узкобазовой подсистемы, блок клавиатуры, блок индикации, блок вычисления текущей скорости летательного аппарата, блок вычисления текущей высоты полета летательного аппарата, блок вычисления дальности до летательного аппарата, оперативное запоминающее устройство, постоянное запоминающее устройство, первый дополнительный порт вывода, микропроцессор, объединенные между собой шиной адреса и данных; радиомодем декаметрового диапазона радиоволн, вход которого соединен с выходом первого дополнительного порта вывода, а выход является общим выходом системы, обеспечивающим радиосвязь с летательным аппаратом.
| Одноэтапное оценивание местоположения источника радиоизлучения пассивной системой, состоящей из узкобазовых подсистем | |||
| Ж | |||
| Радиотехника и электроника, 2004, том 49, N2, с.156-170 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ | 2009 |
|
RU2430385C2 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2004 |
|
RU2263328C1 |
| US 6307503 B1, 23.10.2001 | |||
| JP 2010266228 A, 25.11.2010. | |||

