Предлагаемый электромагнитный двигатель (ЭМД) относится к электротехнике, в частности к электромагнитным двигателям с возвратно-поступательным перемещением исполнительного органа, и может быть использован в роли привода для прессов, насосов и других механизмов.
Уровень техники в данной области характеризуется приведенными ниже сведениями.
Известны электромагнитные двигатели, электродвигатели и электромагниты для реализации линейного перемещения рабочего звена (якоря). Так, вертикальный линейный электродвигатель /Гарницкий В.Н. А.с. СССР N743132, кл. H 02 K 33/02, опубл. 25.06.80 БИ 23/ выполнен как броневой электромагнит со втяжным якорем в виде ферромагнитного цилиндра; для повышения плавности хода между кольцевым полюсом корпуса электромагнита и ферромагнитным цилиндром помещена ферромагнитная вставка в виде втулки с буртиком. Недостатком этого электродвигателя является наличие нерабочего зазора между кольцевым полюсом и ферромагнитным цилиндром (якорем), что снижает силу тяги и экономичность.
Наиболее близким по технической сущности к заявляемому устройству является "Электромагнитный двигатель с горизонтальной тяговой характеристикой" (Патент РФ N 2089995 кл. H 02 K 33/02, H 01 F 7/16, 10.09.97 бюл. N 25), который содержит цилиндрический магнитопровод, состоящий из корпуса, сердечника, соединяющего их фланца, обмотку, расположенную вокруг сердечника, и плоский внешний прямоходовый якорь с ферромагнитным шунтом, выполненным в виде кольца с усеченно- коническими боковыми поверхностями.
Этому двигателю присущи недостатки - невысокая тяга и отсутствие возможности ее коррекции соответственно особенностям нагрузки, и как следствие низкая экономичность. Невысокая тяга обусловлена использованием плоского прямоходового якоря, который, как следует из фиг. 1 - 4, приведенных в описании прототипа, выполнен как единое целое с ферромагнитным шунтом, и это приводит к резкому подъему тяговой характеристики в конце хода якоря. Для исключения этого подъема в прототипе ограничен ход якоря путем установки немагнитной прокладки 12 фиг. 1 и соответственно не полностью использована энергия магнитного поля.
Задачей предлагаемого изобретения является повышение экономичности двигателя путем повышения тяги в рабочем диапазоне хода якоря и обеспечения возможности коррекции тяговой характеристики в процессе эксплуатации соответственно особенностям нагрузки и режима работы.
Решение поставленной задачи достигается тем, что у предлагаемого электромагнитного двигателя, который содержит цилиндрический магнитопровод, состоящий из корпуса, сердечника, соединяющего их фланца, обмотку, расположенную вокруг сердечника, и плоский внешний прямоходовый якорь с ферромагнитным шунтом, выполненным в виде кольца, плоский внешний прямоходовой якорь выполнен немагнитным и введена система управления, которая содержит программируемый блок управления, детектор нулевого напряжения, датчики исходного и контрольного положений якоря, силовой узел с входами управления и клеммами питания и контроля, при этом блок управления снабжен тремя логическими входами, к которым присоединены выходы детектора нулевого напряжения, датчиков исходного и контрольного положений якоря, аналоговыми входами, соединенными с контрольными клеммами силового узла, и управляющими выходами, которые подключены ко входам управления силового узла, а входы детектора нулевого напряжения - к обмотке двигателя.
У предлагаемого двигателя плоский внешний прямоходовой якорь выполнен немагнитным, а для взаимодействия с магнитным полем использован ферромагнитный шунт в виде кольца. Это позволило увеличить тягу в рабочем диапазоне хода якоря за счет использования энергии магнитного поля, которая у прототипа, концентрируясь в плоском якоре, расходовалась на резкое увеличение тяги в конце хода. Введение системы управления обеспечило возможность дозированной подачи тока в обмотку в соответствии особенностям нагрузки и режима работы. Все это дает повышение экономичности и расширяет технологические возможности предлагаемого двигателя.
На фиг. 1 приведен разрез предлагаемого ЭМД, у которого ферромагнитный шунт выполнен с усеченно-коническими боковыми поверхностями.
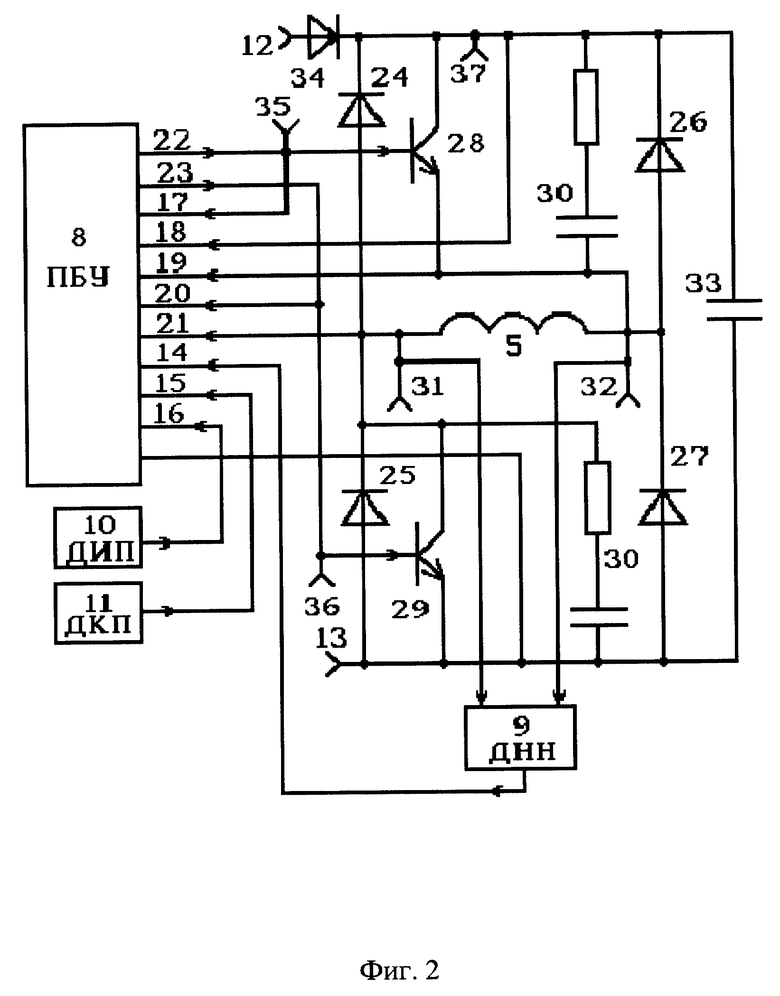
На фиг. 2 приведен пример исполнения схемы системы управления предлагаемого электромагнитного двигателя с однотактной мостовой схемой с демпфирующими диодами в роли силового узла.
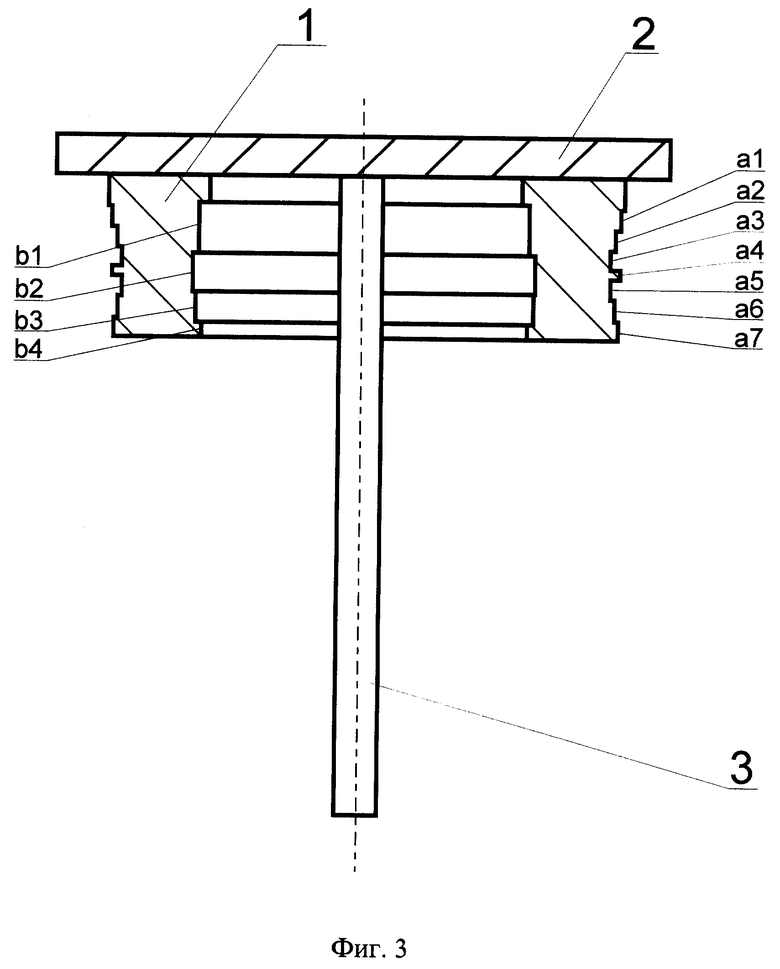
На фиг. 3 приведен вариант исполнения якоря, где для формирования тяговой характеристики использованы кольцевые пазы a1...a7 на внешней и b1... b4 на внутренней боковых поверхностях ферромагнитного шунта.
На фиг. 4 изображены экспериментальные тяговые характеристики предлагаемого ЭМД (I), прототипа (II) и варианта якоря фиг.3 (III).
Предлагаемый двигатель (фиг. 1) содержит выполненный в виде кольца ферромагнитный шунт 1 с усеченноконическими боковыми поверхностями, с которым жестко связан внешний плоский прямоходовой немагнитный якорь 2, а с ним, в свою очередь, жестко связан направляющий стержень 3. Этот стержень выполнен с возможностью осевого перемещения в продольном канале сердечника 4. Сердечник 4, вокруг которого расположена обмотка 5, корпус 6 и фланец 7 образуют статор электромагнитного двигателя. Якорь снабжен возвратной пружиной, не показанной на приводимых фигурах. Система управления (фиг. 2) содержит программируемый блок управления 8 (ПБУ), детектор нулевого напряжения 9 (ДНН), датчик исходного положения якоря 10 (ДИП), датчик контрольного положения якоря 11 (ДКП) и силовой узел с клеммами подвода питания 12 и 13. Блок управления имеет три логических входа 14, 15 и 16, пять аналоговых входов 17, 18, 19, 20 и 21 и управляющие выходы 22 и 23. На фиг.3 силовой узел выполнен в виде однотактной мостовой схемы с четырьмя демпфирующими диодами 24, 25, 26 и 27, двумя транзисторами 28 и 29 в роли силовых ключей, которые установлены в противолежащих плечах мостовой схемы и шунтированы RC-цепочками 30. Обмотка ЭМД 5 присоединена к клеммам контроля 31 и 32 на горизонтальной диагонали мостовой схемы, а вертикальная диагональ шунтирована рекуперативным конденсатором 33 и присоединена к клеммам питания 12 и 13 через прямосмещенный диод 34. Базы транзисторов 28 и 29, к которым присоединены клеммы контроля 35 и 36, являются входами управления силового узла. Клемма контроля 37 присоединена к вертикальной диагонали в точке соединения диода 34 с рекуперативным конденсатором 33. К логическим входам блока управления 16, 15 и 14 присоединены выходы датчиков исходного и контрольного положений и детектора нулевого напряжения. Аналоговые входы 17, 18, 19, 20 и 21 подключены к клеммам контроля 35, 37, 32, 36 и 31, а управляющие выходы 22 и 23 соединены со входами управления силового узла - базами транзисторов 28 и 29. Обмотка 5 с детектором нулевого напряжения 9, входы которого присоединены к выводам обмотки, выполняют функцию датчика останова якоря.
В исходном состоянии плоский прямоходовой немагнитный якорь 2 с ферромагнитным шунтом 1 и направляющим стержнем 3 максимально выдвинут из статора магнитопровода (фиг. 1, позиции 4, 5, 6, 7), что соответствует перемещению якоря по возрастающему участку тяговой характеристики в ее начале (фиг. 4). В процессе снятия тяговой характеристики было установлено, что при подаче напряжения на выводы обмотки 5 через нее протекает ток, и ферромагнитный шунт втягивается в промежуток между корпусом 6 и сердечником 4. Тяга двигателя непостоянна и зависит от положения якоря, и эта зависимость различна для разных форм сечения ферромагнитного шунта 1 и величины отношения высоты (продольного размера) ферромагнитного шунта 1 к длине хода якоря. При этом увеличение магнитного потока (при увеличении введенной в зазор ферромагнитной массы) и уменьшение магнитного сопротивления в рабочих зазорах между ферромагнитным шунтом и сердечником, и между шунтом и корпусом магитопровода приводят к увеличению тяги. При сечении кольца в виде трапеции, у которой меньшее основание обращено к обмотке (фиг. 1), имеет место преимущественно монотонный рост тяги по ходу якоря. При форме сечения кольца в виде трапеции с большим основанием, обращенным к обмотке, у тяговой характеристики имеет место преимущественно подъем в начале хода с последующим спадом. Как и у прототипа, в предлагаемом двигателе четко выражена зависимость формы тяговой характеристики от углов наклона внешней и внутренней поверхностей якоря к плоскости, перпендикулярной оси, но при любой форме сечения кольца имеет место спад тяги в конце хода, если длина хода больше высоты ферромагнитного шунта 1.
Вариант исполнения якоря с цилиндрической формой ферромагнитного шунта (фиг. 4) и кольцевыми пазами на внешней и внутренней поверхностях обеспечивает возможность введения поправок в форму тяговой характеристики во всем диапазоне хода якоря. Так, ряд примыкающих друг к другу пазов a7, a6, a5 на наружной поверхности и b4, b3, b2 на внутренней образуют ступенчатый аналог сечения кольца 1 ферромагнитного шунта в форме трапеции с большим основанием, обращенным к обмотке, а пазы a3, a2, a1 и b2, b1 образуют аналог трапеции с малым основанием, обращенным к обмотке. Вместе они обеспечивают тяговую характеристику с подъемами на краях и спадом в середине хода. Паз малой глубины a4, расположенный между двумя более глубокими пазами a5 и a3, имеет вид ребра. Осевой размер этого ребра выбран таким, чтобы в ребре происходило насыщение проходящим по нему магнитным потоком. Поэтому ребро a4 хотя и повышает тягу в средней части хода якоря, но не создает чрезмерно большой концентрации магнитного поля. Иными словами, изменение расположения, числа и размеров кольцевых пазов дает возможность задания формы тяговой характеристики соответственно особенностям нагрузки.
Представленный вариант программируемого блока управления 8 выполнен на процессоре PIC16C73 фирмы Microchip Technology, который содержит три 8-битных таймера/счетчика с 8-битными программируемыми предварительными делителями (фактически три 16-битных таймера/счетчика событий), 33 индивидуально программируемых линии двунаправленного ввода/вывода и восьмибитный АЦП с восемью входными каналами и схемой выборки-хранения. При этом три линии использованы как логические входы, две - как выходы управления, а входы каналов АЦП подключены к контрольным точкам и использованы для диагностики элементов силового узла. В блоке управления программно реализованы следующие режимы работы:
- непрерывный режим работы с заданной частотой следования рабочих циклов "рабочий ход - возврат в исходное состояние",
- "пачка" из заданного числа рабочих циклов с заданной частотой следования с заданной паузой между пачками,
- отдельные рабочие циклы.
При работе предлагаемого двигателя блок управления 8 обеспечивает формирование управляющих сигналов таким образом, что во время рабочего хода один ключ - транзистор 28 открыт постоянно за счет подачи на его базу 35 с выхода 22 блока 8 импульса напряжения длительностью, равной длительности рабочего хода, а второй - 29 открыт импульсно за счет подачи напряжения с широтно-импульсной модуляцией (ШИМ) с управляющего выхода 23 на базу 36 транзистора 29, что обеспечивает дозирование величины тока в обмотке 5. Период и длительность импульсов ШИМ заданы блоком управления 8 в результате анализа разности времени между моментом прохода якорем 2 контрольного положения и моментом его останова. При определении этой разности запуск внутреннего таймера процессора происходит при подаче на логический вход 15 сигнала с выхода датчика прохода контрольного положения 11, а останов таймера - при приходе на вход 14 сигнала с выхода датчика останова якоря, функцию которого выполняет детектор нулевого напряжения 9, присоединенный входами к выводам обмотки 5. Место установки датчика контрольного положения 11 выбрано в пределах 0.75 - 0.85 от хода якоря и соответствует линии К на фиг. 4. Момент прохода якорем этого положения соответствует моменту запирания ключей, далее якорь движется по инерции. Начало нового рабочего хода разрешено только при наличии на логическом входе 16 сигнала с выхода датчика 10 о нахождении якоря в исходном положении. Большей нагрузке соответствует более ранний останов якоря и увеличение длительности импульса ШИМ блоком управления для компенсации увеличения нагрузки. Таким образом осуществлено дозирование тока в соответствии с особенностями нагрузки, чем обеспечено повышение экономичности предлагаемого двигателя.
В начале рабочего хода двигателя оба ключа установлены в состояние "Замкнуто". Напряжение питания положительной полярности через клемму 12, диод 34, замкнутый ключ 28 подведено к выводу обмотки 5, который соединен с клеммой 31, а отрицательное напряжение через клемму 13 и замкнутый ключ 29 - ко второму выводу той же обмотки с клеммой 32. Это является причиной возникновения тока в обмотке, создания тяги и втягивания якоря в промежуток между корпусом 6 и сердечником 4. Закрытие ключей приводит к повышению напряжения на выводах обмотки и заряду рекуперативного конденсатора 33 через демпфирующие диоды 24 и 27, за счет кинетической энергии, накопленной в индуктивности обмотки и подвижных частях нагрузки, кинематически связанных с якорем. RC-цепочки 30 способствуют уменьшению мгновенных значений мощности, выделяющейся на транзисторах при переводе их из состояния "Разомкнуто" в состояние "Замкнуто" и особенно из состояния "Замкнуто" в состояние "Разомкнуто". Демпфирующие диоды 24, 25, 26, 27 обеспечивают заряд конденсатора 33 при превышении напряжения на обмотке 5 напряжения между клеммами 37 и 13 независимо от причины превышения и полярности напряжения. Рекуперация возвращает энергию в цепь питания ЭМД, что повышает экономичность предлагаемого двигателя.
Для диагностики элементов силового узла использованы аналоговые входы 17, 18, 19, 20 и 21 блока управления, присоединенные к точкам контроля 31, 32, 35, 36, 37. Контроль исправности каждого элемента сведен к оценке уровней напряжения на клеммах контроля во время рабочего хода. Например, исправному состоянию соответствуют: на клемме 37 всегда наличие напряжения не менее напряжения питания, при открытых ключах 28 и 29 на клемме 32 - не менее 0.9 от напряжения питания, подведенного к клеммам 12 и 13, между клеммами 32 и 35 - (0.4-0.9) В, на клемме 31 - не более 0.1 от напряжения на клемме 37.
Таким образом, поставленная задача - повышение экономичности электромагнитного двигателя - решена путем повышения тяги за счет исполнения якоря немагнитным с ферромагнитным шунтом в виде кольца, и применения системы управления для дозированной подачи тока в обмотку в соответствии с особенностями нагрузки и рекуперации кинетической энергии, запасенной в индуктивности обмотки и подвижных частях нагрузки, кинематически связанных с якорем, выполнена. Кроме того в предполагаемом изобретении дополнительно реализована возможность диагностики элементов силового узла.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМАГНИТНЫЙ ДВИГАТЕЛЬ | 2005 |
|
RU2285969C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ДВИГАТЕЛЬ С ГОРИЗОНТАЛЬНОЙ ТЯГОВОЙ ХАРАКТЕРИСТИКОЙ (ВАРИАНТЫ) | 1995 |
|
RU2089995C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ДВИГАТЕЛЬ (ВАРИАНТЫ) | 2003 |
|
RU2236744C1 |
| СПОСОБ ФОРМООБРАЗОВАНИЯ ПЛОСКИХ КОЛЬЦЕВЫХ ЗАГОТОВОК | 1996 |
|
RU2108186C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ДВИГАТЕЛЬ (ВАРИАНТЫ) | 2012 |
|
RU2526852C2 |
| ЛИНЕЙНЫЙ ДВИГАТЕЛЬ | 2008 |
|
RU2370874C1 |
| ОГНЕПРЕГРАДИТЕЛЬ | 2006 |
|
RU2320386C1 |
| ДЫХАТЕЛЬНЫЙ КЛАПАН | 1999 |
|
RU2159887C1 |
| ГАСИТЕЛЬ ПУЛЬСАЦИЙ | 2004 |
|
RU2277198C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДИАМЕТРАЛЬНЫХ РАЗМЕРОВ ВНУТРЕННИХ КАНАВОК ПОД УПЛОТНИТЕЛЬНЫЕ КОЛЬЦА, МАНЖЕТЫ, САЛЬНИКИ | 1995 |
|
RU2097682C1 |

Изобретение может быть использовано в роли привода для прессов, насосов и других механизмов. Участок коммуникации запитывают с каждой из двух сторон модулированным электрическим током. В электромагнитном двигателе, который содержит цилиндрический магнитопровод, состоящий из корпуса, сердечника, соединяющего их фланца, обмотку, расположенную вокруг сердечника, и плоский внешний прямоходовой якорь с ферромагнитным шунтом, выполненным в виде кольца, плоский внешний прямоходовой якорь выполнен немагнитным. Система управления содержит программируемый блок управления, детектор нулевого напряжения, датчик исходного и контрольного положений якорями и силовой узел. Технический результат - увеличение силы тяги в рабочем диапазоне хода якоря, повышение экономичности и расширение технологических возможностей двигателя. 1 з.п.ф-лы, 4 ил.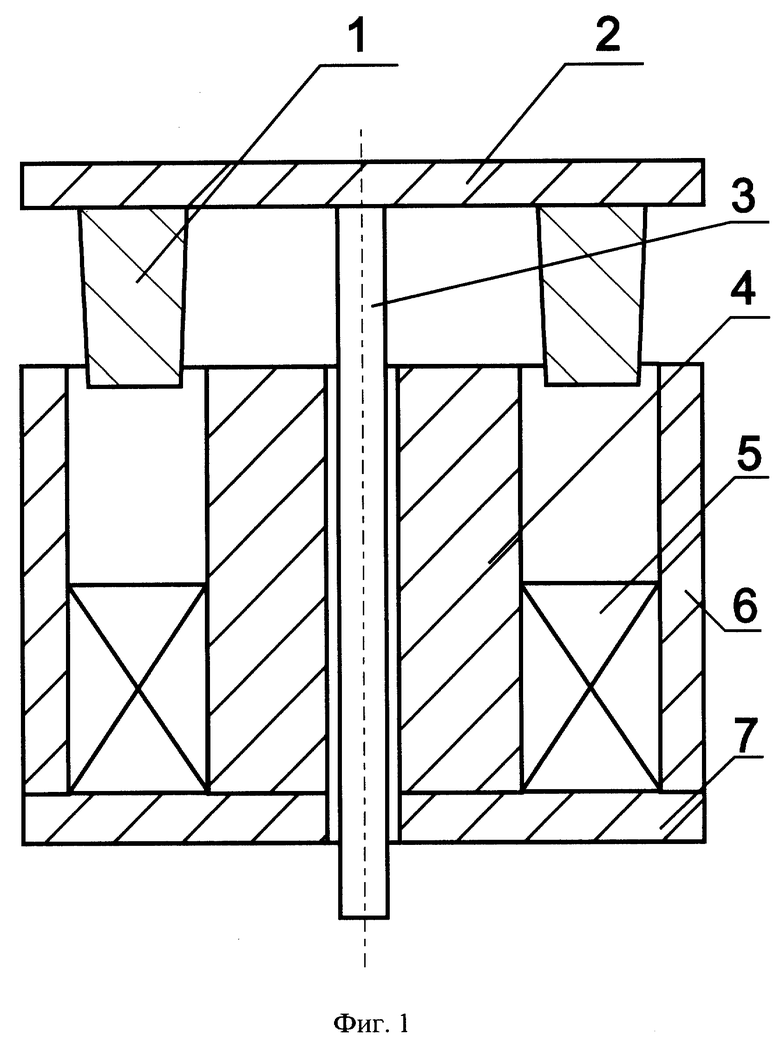
| ЭЛЕКТРОМАГНИТНЫЙ ДВИГАТЕЛЬ С ГОРИЗОНТАЛЬНОЙ ТЯГОВОЙ ХАРАКТЕРИСТИКОЙ (ВАРИАНТЫ) | 1995 |
|
RU2089995C1 |
| Вибропривод | 1986 |
|
SU1363392A1 |
| Электромагнитный вибропривод | 1985 |
|
SU1412818A1 |
| Устройство для импульсного форсирования электромеханизмов | 1984 |
|
SU1292064A1 |
| Устройство для управления электромагнитным механизмом | 1986 |
|
SU1372377A1 |
| Буровая коронка | 1986 |
|
SU1476102A1 |

