Изобретение относится к области электротехники, конкретнее к способам управления однофазной индукционной установкой для индукционной пайки трубопроводов малого диаметра до 160 мм.
Оно может быть использовано в автоматизированных системах управления индукционными установками для пайки трубопроводов малого диаметра с целью резкого повышения точности производственного процесса монтажа трубопроводов малого диаметра и обеспечения необходимого качества получаемого шва.
Известен способ управления, осуществляемый в регуляторе мощности типа АРИК, однофазной индукционной установкой при отклонении величины cosϕ от заданных границ изменения, включающий операции измерения тока и напряжения, вычисления cosϕ, сравнения и отработки рассогласования измеренного cosϕ и заданного cosϕ [1].
Недостатком способа управления, реализованного в [1], принятого в качестве аналога, является низкая точность и малые скорости отработки рассогласования по cosϕ.
В значительной степени эти недостатки преодолены в способе управления индукционной установкой по величине tgϕ [2]. Здесь операция регулирования фазового угла осуществляется по импульсному принципу с использованием операции фазовращения в соответствии с выражениями для двух возможных схемных вариантов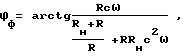
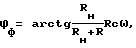
(см. стр. 32 источника [2], принятого нами за прототип).
Несмотря на большую разрешающую способность способа управления по прототипу [2] , недостатками остается малая точность, большое количество необходимых измерений и преобразований, и как результат запаздывание с управлением. Если для ряда технологических индукционных процессов с массивной загрузкой и достаточно большой инерционностью процесса такой способ может быть применен, то для индукционной установки пайки трубопроводов малого диаметра, где процессы очень динамичны, а инерционность из-за малой по массе технологической загрузки весьма невелика, с помощью прототипа нельзя обеспечить высокое качество производственного процесса, особенно в случаях малых углов ϕ, часто наблюдаемых в рассматриваемом типе оборудования - установке индукционной пайки трубопроводов малого диаметра до 160 мм.
Целью заявляемого изобретения является упрощение и облегчение операции измерения фазового угла ϕ, повышение быстродействия и точности управления индукционной установки для обеспечения требуемого качества монтажа трубопроводов малого диаметра при снижении непроизводительных затрат энергии, в том числе при малых углах ϕ, где их измерять особенно трудно.
Поставленная цель достигается в способе управления однофазной индукционной установкой для пайки трубопроводов малого диаметра, при котором измеряют величины токов и напряжений, определяют фазовый угол между ними, сравнивают его с аналогичным заданным значением и переключают величину емкости конденсаторной батареи в сторону устранения возникшего рассогласования.
Причем в процессе измерения мгновенных значений токов и напряжений формируют первый электрический сигнал, например по напряжению, равный разности количества измерений до появления нулевых значений тока и нулевых значений напряжения за время измерений 40 - 50 мс с частотой 2х120 мкс, далее по запомненным значениям тока и напряжения до и после их нулевых значений формируют второй и третий электрические сигналы в виде отношений измеренных значений токов и напряжений, предшествующих их нулевым значениям, к сумме предшествующих и непосредственно последующих значений токов и напряжений после их нулевых значений, затем формируют управляющий сигнал в виде
где N - число измерений значений тока и напряжения за один электрический период t = 0,02 с изменения тока и напряжения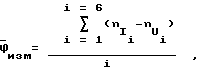
 - количество измерений до появления нулевых значений тока и нулевых значений напряжения за период измерения 40 - 50 мс,
- количество измерений до появления нулевых значений тока и нулевых значений напряжения за период измерения 40 - 50 мс,
i - количество нулевых значений напряжения и тока,
где m - количество измерений до измеренных пар значений тока и напряжения, предшествующих и последующих нулевым значениям тока и напряжения;
|I(t-l)|m,|U(t-l)|m и |I(t+l)|m,|U(t+l)|m - модули соответственно запомненных и измеренных значений тока и напряжения непосредственно до и после нулевых значений токов и напряжений, определенных в процессе измерений, и по сформированному управляющему сигналу, пропорциональному ϕупр, после сравнения с заданной аналогичной величиной переключают емкости конденсаторной батареи индукционной установки для пайки трубопроводов малого диаметра в сторону устранения возникшего рассогласования, после чего операции с измеряемыми токами и напряжениями повторяют циклично в интервале 40 - 50 мс.
Существенным отличием от известных способов управления однофазной индукционной установкой для пайки трубопроводов малого диаметра является то, что ни в одном из известных способов управления аналогичного назначения не сочетаются экономичность и простота технического решения при операциях с измерениями только токов и напряжений, то есть двух параметров, в отличие от прототипа, в реальном масштабе времени, которое позволяет современная элементная база, повышенная точность поддержания рационального режима индукционной установки для пайки трубопроводов малого диаметра путем предоставления возможности адаптационного к быстроменяющимся технологическим условиям скорректированного управления как для больших фазовых углов, так и для малых их величин, чего нет в прототипе и особенно важно для индукционной пайки трубопроводов малого диаметра, при экономии электроэнергии и расходов на эксплуатацию и практически мгновенной реакции управления в реальном масштабе времени, то есть в темпе с процессом индукционной пайки трубопроводов малого диаметра.
Заявляемый способ поясняется фиг. 1 и 2. На фиг. 1 приведены кривые изменения токов и напряжений при работе индукционной установки для пайки трубопроводов диаметром до 160 мм.
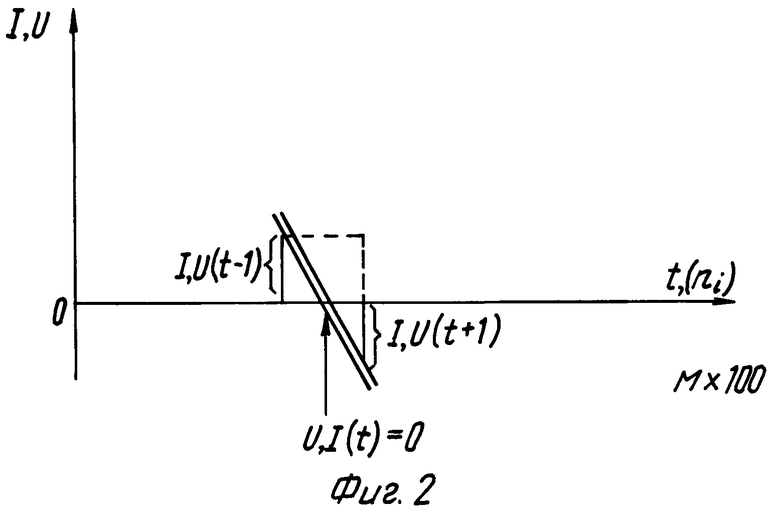
Здесь видны нулевые значения измеряемых величин при переходе через ось времени и фазовый угол ϕупр как разность числа замеров nI и nU до упомянутых нулевых значений. На фиг. 2 видно, что при измерении значений тока до и после его нулевого значения отношение модулей предшествующего значения тока к сумме модулей предшествующего и последующего значений является tgϕкорр, а при малых углах tgϕкорр= ϕкорр.
Как можно увидеть из приведенных чертежей, назначение способа состоит в определении угла ϕизм (фиг. 1), скорректированного значения ϕкорр и основного сигнала управления ϕупр= ϕизм+ϕкорр.
Пример реализации.
Управление однофазной индукционной установкой для пайки трубопроводов малого диаметра происходит следующим образом (фиг. 1 и 2).
1) Через 120 мкс в течение 48 мс (см. фиг. 1) измеряли значения тока I и значения напряжения U, набирая таким образом 48 мс/120 мкс = 400 значений измерений. Такие наборы измерений получали для повышения точности в 2 - 3 раза. Затем определяли моменты, при которых значения напряжения и тока были нулевыми.
2) При этом запоминали количество измерений до появления нулевых значений тока 




 а также количество измерений до появления нулевых значений напряжения
а также количество измерений до появления нулевых значений напряжения 




 i = 6.
i = 6.
3) Полученные электрические сигналы, пропорциональные замеренным и запомненным значениям  и
и  после вычитания
после вычитания  усредняли, т. е. суммировали и уменьшали в i = 6 раз по числу проведенных наборов измерений: (17+19+18+20+16+20)/6= 18,333. Для корректировки точности измерений при малых углах ϕ (см. фиг. 2):
усредняли, т. е. суммировали и уменьшали в i = 6 раз по числу проведенных наборов измерений: (17+19+18+20+16+20)/6= 18,333. Для корректировки точности измерений при малых углах ϕ (см. фиг. 2):
4) Измеряли предшествующие нулевым значениям модули токов
|I(t-l)|1= 127A;|I(t-l)|2= 121A; |I(t-l)|3= 126A;|I(t-l)|4= 128A; |I(t-l)|5= 120A;|I(t-l)|6= 110A; |I(t-l)|7= 130A;|I(t-l)|8= 112A; |I(t-l)|9= 131A; |I(t-l)|10= 142A;.....|I(t-l)|m
5) и модули напряжений
|U(t-l)|1= 400B;|U(t-l)|2= 350B; |U(t-l)|3= 380B; |U(t-l)|4 = 290B; |U(t-l)|5 = 410B; |U(t-l)|6= 420B;|U(t-l)|7= 360B; |U(t-l)|8= 300B;|U(t-l)|9= 420B; |U(t-l)|10= 390B;.....|U(t-l)|m.
6) Соответственно замеряли последующие после нулевых значений I (t), U (t) модули токов (см. фиг. 2):
|I(t+l)|1= 142A;|I(t+l)|2= 112A; |I(t+l)|3= 131A;|I(t+l)|4= 130A; |I(t+l)|5= 110A;|I(t+l)|6= 120A; |I(t+l)|7= 121A;|I(t+l)|8= 126A; |I(t+l)|9= 127A; |I(t+l)|10= 128A;.....|I(t+l)|m
7) и напряжений
|U(t+l)|1= 360B;|U(t+l)|2= 300B; |U(t+l)|3= 420B;|U(t+l)|4= 290B; |U(t+l)|5= 310B;|U(t+l)|6= 410B; |U(t+l)|7= 400B;|U(t+l)|8= 350B;  |U(t+l)|10= 290B;.....|U(t+l)|m.
|U(t+l)|10= 290B;.....|U(t+l)|m.
8) Последовательно складывали модули измеренных электрических сигналов в операциях 4), 6) с токами |I(t-l)|m+|I(t+1)|m для m = 1: 269 A; для m=2: 233 A; для m=3: 275 A; для m=4: 258 A; для m=5: 230 A; для m=6: 230 A; для m=7: 251 A; для m=8: 238 A; для m=9: 258 A; для m=10: 270 A,
9) и операциях 5), 7) с напряжениями |U(t-l)|m+|U(t+1)|m для m=1: 760 B; для m=2: 650 B; для m=3: 800 B; для m=4: 580 B; для m=5: 720 B; для m=6: 830 B; для m=7: 760 B; для m=8: 650 B; для m=9: 800 B; для m=10: 680 В ....
10) формировали электрические сигналы, пропорциональные отношениям полученных в операции 4) модулей измеренных значений токов, предшествующих их нулевым значениям, к сумме модулей, предшествующих нулевым значениям и непосредственно последующих значений токов, полученных в операциях 8)
для m=1: 0,472; для m=2: 0,519; для m=3: 0,490; для m=4: 0,496; для m=5: 0,522; для m=6: 0,478; для m=7: 0,518; для m=8: 0,471; для m=9: 0,508; для m=10: 0,526; ....
11) Аналогично 10) для отношений полученных в операции 5) модулей измеренных значений напряжений, предшествующих их нулевым значениям, к сумме модулей предшествующих значений и непосредственно последующих значений напряжений, полученных в операции 9)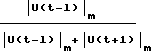
для m=1: 0,526; для m=2: 0,538; для m=3: 0,475; для m=4: 0,500; для m=5: 0,569; для m=6: 0,506; для m=7: 0,474; для m=8: 0,462; для m=9: 0,525; для m=10: 0,574; ....
12) Проводили операцию вычитания и формировали электрические сигналы, пропорциональные модулям, полученным в результате вычитания показателей для m= 1: 0,054; для m=2: 0,019; для m=3: 0,015; для m=4: 0,004; для m=5: 0,047; для m= 6: 0,028; для m=7: 0,044; для m=8: 0,009; для m=9: 0,017; для m=10: 0,048; ....
13) Усредняли полученные в операции 12) электрические сигналы, суммируя и разделив на число выборки измерений токов и напряжений m, получив электрический сигнал  =0,029.
=0,029.
14) Электрические сигналы, пропорциональные  , складывали, получили 18,362 и далее масштабировали в пропорции 360/N 1,745•10-2, где N= 20000 мкс/120 мкс. Получили электрический сигнал с весом, пропорциональным контролируемому углу управления ϕупр=0,622 рад.
, складывали, получили 18,362 и далее масштабировали в пропорции 360/N 1,745•10-2, где N= 20000 мкс/120 мкс. Получили электрический сигнал с весом, пропорциональным контролируемому углу управления ϕупр=0,622 рад.
15) Сравнивали с аналогичным заданным ϕупр.зад=0,55 рад, получили отклонение от заданного 0,142 рад или 25% и переключали с помощью тиристорных ключей конденсаторную батарею индукционной установки для пайки трубопроводов малого диаметра в сторону увеличения емкости на 25%.
Изложенную последовательность операций с токами и напряжениями циклически повторяли.
Реализуемость патентуемого способа не вызывает сомнений, так как вопросы измерения токов и напряжений на индукционных установках для пайки трубопроводов малого диаметра отработаны, определение нулевых их значений реализуется с помощью нуль-компараторов, а операции логического сложения, вычитания, деления, сравнения, запоминания и др. осуществляются на серийных элементах современной микроэлектронной техники огромного быстродействия.
Применение патентуемого способа за счет простоты, повышения точности, быстродействия и качества швов трубопроводов малого диаметра в расчете на одну однофазную индукционную установку позволяет получить экономический эффект 1,284 млн. руб. в год снижении расхода энергии на 2,8% и увеличении производительности на 1,4%.
Литература
1. Электрооборудование и автоматика электротермических установок. Справочник под ред. А.П. Альтгаузена и др. - М.: Энергия, 1978, с. 207.
2. Гитгард Д.А., Иоффе Ю.С. Новые источники питания и автоматика индукционных установок для нагрева и плавки. - М.: Энергия, 1972, с. 31.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТАЦИОННАЯ СИСТЕМА УПРАВЛЕНИЯ ОДНОЭЛЕКТРОДНОЙ ЭЛЕКТРОТЕРМИЧЕСКОЙ УСТАНОВКОЙ ДЛЯ ВЫСОКОТОЧНЫХ ПРОЦЕССОВ | 2000 |
|
RU2159519C1 |
| Способ ведения плавки в дуговой сталеплавильной печи | 1987 |
|
SU1525954A1 |
| СПОСОБ ЭЛЕКТРОРАЗВЕДКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2007 |
|
RU2354999C1 |
| Устройство для измерения нестабильности частоты | 1980 |
|
SU940080A1 |
| Способ определения расстояния до места замыкания на землю в электрических сетях с изолированной нейтралью | 1990 |
|
SU1698848A1 |
| МАССОВЫЙ РАСХОДОМЕР-ПЛОТНОМЕР ЖИДКОСТИ, ПОДАВАЕМОЙ ЦЕНТРОБЕЖНЫМ ЭЛЕКТРОНАСОСОМ | 1996 |
|
RU2182697C2 |
| Автоматическая система управления компенсирующей конденсаторной батареей электропечи | 1982 |
|
SU1103215A1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ПРИ РАБОТЕ С ПЕРЕГРУЗКОЙ ЭЛЕКТРОДВИГАТЕЛЕЙ МАГИСТРАЛЬНЫХ НАСОСОВ НЕФТЕПЕРЕКАЧИВАЮЩЕЙ СТАНЦИИ МАГИСТРАЛЬНОГО НЕФТЕПРОВОДА (НПС МН) | 2004 |
|
RU2256100C1 |
| Автоматизированная адаптивная система управления рудновосстановительной электропечи | 1989 |
|
SU1806448A3 |
| Аналого-цифровой преобразователь | 1987 |
|
SU1481887A1 |
Изобретение может быть использовано в электротехнике и нефтегазодобывающей промышленности при монтаже трубопроводов малого диаметра до 160 мм. Техническим результатом является упрощение и облегчение операции измерения фазового угла ϕ, повышение быстродействия и точности управления индукционной установкой для обеспечения требуемого качества монтажа трубопроводов малого диаметра при снижении непроизводительных затрат энергии, в том числе при малых углах ϕ, где их измерять особенно трудно и что характерно при индукционном соединении трубопроводов малого диаметра, т.е. с динамичной при малой инерционности активной нагрузкой. В процессе управления измеряют мгновенные значения токов и напряжений, формируют первый электрический сигнал, пропорциональный разности количества измерений, до появления нулевых значений тока и нулевых значений напряжения за время измерения 40 - 50 мс с частотой 1 - 2 • 120 мкс, по запомненным значениям тока и напряжения до и после их нулевых значений формируют второй и третий электрические сигналы в виде отношений измеренных значений токов и напряжений, предшествующих их нулевым значениям, к сумме предшествующих и непосредственно последующих значений токов и напряжений после их нулевых значений, затем формируют управляющий сигнал и по сформированному управляющему сигналу после сравнения с заданной аналогичной величиной переключают емкости конденсаторной батареи индукционной установки для пайки трубопроводов малого диаметра в сторону устранения возникшего рассогласования, после чего операции с измеряемыми токами и напряжениями повторяют циклично в интервале 40 - 50 мс. 2 ил.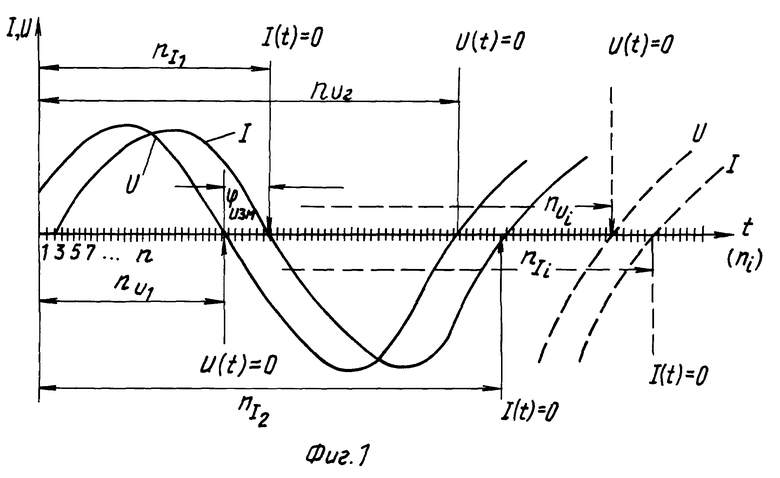
Способ управления однофазной индукционной установкой для пайки трубопровода малого диаметра, при котором измеряют величины токов и напряжений, определяют фазовый угол между ними, сравнивают его с аналогичным заданным значением и переключают величину емкости конденсаторной батареи в сторону устранения возникшего рассогласования, отличающийся тем, что в процессе измерения мгновенных значений токов и напряжений формируют первый электрический сигнал по напряжению, равный разности количества измерений до появления нулевых значений тока и количества измерений до появления нулевых значений напряжения за отрезок времени измерения 40 - 50 мс с частотой 1 - 2 х 120 мкс, далее по запомненным значениям тока и напряжения до и после их нулевых значений формируют второй и третий электрические сигналы в виде отношений измеренных значений токов и напряжений, предшествующих их нулевым значениям, к суммам предшествующих и непосредственно последующих значений токов и напряжений после их нулевых значений, затем формируют управляющий сигнал в виде
где N - число измерений значений тока и напряжения за один период изменения тока и напряжения;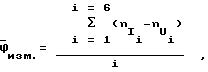
 - количество измерений до появления нулевых значений напряжения и до появления нулевых значений тока;
- количество измерений до появления нулевых значений напряжения и до появления нулевых значений тока;
i - количество нулевых значений напряжения и тока,
m - количество измерений пар значений токов и напряжений, предшествующих и последующих нулевым значениям тока и напряжения;
I(t - 1), U(t - 1) и I(t + 1), U(t + 1) - соответственно измеренные и запомненные токи и напряжения непосредственно до и после нулевых значений токов и напряжений, определенных в процессе измерений,
и по сформированному управляющему сигналу  после сравнения с заданной аналогичной величиной переключают элементы конденсаторной батареи до устранения возникшего рассогласования, после чего операции с измеряемыми токами и напряжениями повторяют циклично с интервалом 40 - 50 мс.
после сравнения с заданной аналогичной величиной переключают элементы конденсаторной батареи до устранения возникшего рассогласования, после чего операции с измеряемыми токами и напряжениями повторяют циклично с интервалом 40 - 50 мс.
| ГИТГАРД Д.А., ИОФФЕ Ю.С | |||
| Новые источники питания и автоматика индукционных установок для нагрева и плавки | |||
| - М.: Энергия, 1972, с | |||
| Способ очистки нефти и нефтяных продуктов и уничтожения их флюоресценции | 1921 |
|
SU31A1 |
| Способ регулирования электрического режима индукционной электротермической установки | 1989 |
|
SU1725405A1 |
| Способ регулирования выходной мощности устройства индукционного нагрева | 1990 |
|
SU1830642A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТЕМПЕРАТУРОЙ ПРИ ИНДУКЦИОННОМ НАГРЕВЕ | 1992 |
|
RU2076465C1 |
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
| US 5548101 A, 20.08.1996. | |||
