Изобретение относится к области электротермии, конкретнее к системам управления одноэлектродными ЭТУ для высокоточных процессов.
Оно может быть использовано в автоматизированных системах управления плазменными, вакуумно-дуговыми и другими одноэлектродными ЭТУ для высокоточных переплавов, напылений и наплавки, соединения деталей и конструкций путем заплавления пространства между ними материалoм электрода, конец которого находится в зоне плазменного, вакуумного или обычного дугового разряда.
Известна система управления одноэлектродной ЭТУ типа БУДП [1], включающая блок регулирования скорости БРС с датчиком скорости плавления ДСП, блок защиты от короткого замыкания, блок сравнения и исполнительный блок управления источником питания ЭТУ.
Сигнал управления формируется как разность между желаемым (заданным) и текущим измеренным значениями скорости плавления.
Недостатком системы управления, реализованной в [1], является низкая точность и малые скорости отработки управляющего по перемещению электрода воздействия. Это допустимо для электродов сравнительно больших диаметров, применяемых в одноэлектродных плазменных, вакуумно-дуговых или электрошлаковых печах, т. е. в ЭТУ с достаточно большой инерционностью технологического процесса, и не удовлетворяет требованиям плазменной, вакуумной и других технологий при реализации особо точных процессов, где существует тесная связь между физико-, электротермическими и химическими процессами под электродом, как правило, небольшого диаметра, т.е. с малой инерционностью. Скорости протекающих электротермических процессов в таких установках гораздо выше и, если не вести дополнительного перераспределения мощности или рабочего тока от источника питания, то возможен выход конца электрода за заданную зону или вниз в сторону к.з., либо вверх в сторону обрыва плазменной, вакуумной или обычной электродуги.
На фиг. 1 представлен процесс управления электродом по принципу "вверх-вниз" с различными скоростями. Он состоит из множества ступенек и может быть аппроксимирован некоторой кривой, по которой можно увидеть, как следует прогнозировать процесс в одноэлектродной ЭТУ, как по направлению (векторно), так и количественно.
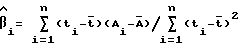
В общем случае такие особо точные процессы контролируются с использованием методов математической статистики. Практически учет в отдельные моменты времени всех перемещений электродов как векторно, так и количественно, осуществляем на базе одного из разделов упомянутой математической статистики, базирующемся на понятии регрессии [2]. Обужая далее понятие регрессии до "метода максимального правдоподобия" [3] , в случае линейной регрессии адаптивная система управления строится по принципу, который определяет так называемую эмпирическую линию регрессии (см. фиг. 1) ЭЛР
где
Для нашего случая адаптационного управления одноэлектродной ЭТУ для высокоточных процессов с перемещениями li электрода "вверх-вниз" в элементарные отрезки времени ti измерения li адаптационный сигнал управления A имеет вид
A = 2tx + y,
где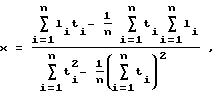
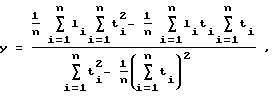
t - задаваемый интервал времени адаптации, n - количество измерений за интервал времени t, li - измеренное с головки электрододержателя элементарное перемещение электрода (проволоки) в момент ti, ti - текущее время измерения или номер измерения.
Целью заявляемого изобретения является повышение быстродействия и точности управления одноэлектродных ЭТУ с плазменной, вакуумной или обычной дугой для придания управлению адаптивного к быстроменяющимся случайным факторам характера, чтобы обеспечить особо точные производственные процессы при снижении непроизводительных затрат энергии для исключения технологического брака при изготовлении высококачественной продукции.
Поставленная цель достигается за счет адаптационной системы управления одноэлектродной ЭТУ для высокоточных процессов, содержащей датчики длины перемещения электрода и времени измерения (датчик скорости плавления), блок сравнения, исполнительный блок управления, источник питания, и снабженной блоками квантования временных интервалов и измерения элементарных длин перемещения электрода за отрезки времени квантования, генератором тактовых импульсов, шестью сумматорами, двумя квадратичными блоками, пятью блоками умножения, тремя блоками вычитания, четырьмя масштабирующими блоками и двумя блоками деления.
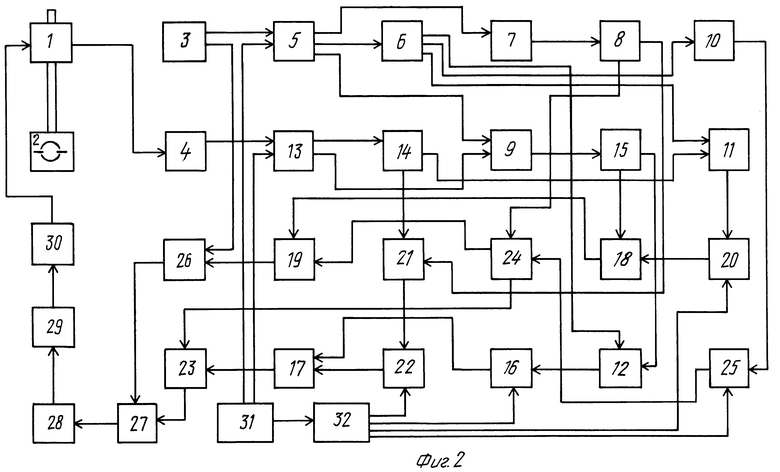
На фиг. 2 представлена структурная схема адаптационной системы управления одноэлектродной ЭТУ для высокоточных процессов. К головке 1 электрододержателя одноэлектродной ЭТУ 2 подключен датчик 4 длины перемещения электрода. Блок 5 квантования временных интервалов, запитанный от задатчика 3 времени и от генератора 31 импульсов, соединен своими тремя выходами: с первым сумматором 6, первым квадратичным блоком 7, выход которого соединен со вторым сумматором 8, а третий выход блока 5 квантования временных интервалов соединен с первым блоком 9 умножения. Первый сумматор 6 соединен своими тремя выходами со вторым квадратичным блоком 10, со вторым 11 и третьим 12 блоками умножения.
Блок 13 измерения элементарных длин перемещения электрода, запитанный от датчика 4 длины перемещения электрода и от генератора 31 импульсов своими двумя выходами соединен с первым блоком 9 умножения, а через третий сумматор 14 со вторым блоком 11 умножения. Четвертый сумматор 15, запитанный с выхода первого блока 9 умножения своими двумя выходами соединен: первым - через третий блок 12 умножения и первый блок 16 масштабирования с первым блоком 17 вычитания, а вторым выходом через второй блок 18 вычитания с первым блоком 19 деления. Второй блок 11 умножения через второй блок 20 масштабирования подключен кo второму входу второго блока 18 вычитания.
Четвертый блок 21 умножения, запитанный от выходов третьего сумматора 14 и от второго сумматора 8 подсоединен через третий блок 22 масштабирования и первый блок 17 вычитания на вход второго блока 23 деления.
Третий блок 24 вычитания, запитанный от второго сумматора 8 и через четвертый масштабирующий блок 25 от второго квадратичного блока 10, соединен двумя своими выходами с первым 19 и вторым 23 блоками деления.
Пятый блок умножителя 26, запитанный своими входами от задатчика 3 времени и первого блока 19 деления, выходом включен на первый вход пятого блока 27 суммирования, второй вход которого подключен от второго блока 23 деления. Выход пятого блока 27 суммирования через блок сравнения 28 и исполнительный блок 29 соединен с блоком 30 источника питания, который питает электрическим током головку 1 электрододержателя ЭТУ 2 для высокоточных процессов.
Генератор 31 тактовых импульсов через шестой сумматор 32 своими четырьмя выходами соединен с первым 16, вторым 20, третьим 22 и четвертым 25 блоками масштабирования. Перечисленные в структуре фиг. 2 блоки и существенные связи адаптационной системы управления одноэлектродной электротермической установки для особо точных процессов позволяют ввести в исполнительный блок источника питания сигнал управления, пропорциональный сформированной методом максимального правдоподобия линейной регрессионной оценки, соответствующий как векторно, так и количественно воздействию факторов на ход технологического процесса: неоднородность обрабатываемого материала, электроэнергии, плазмообразующего газа, несовершенство вакуума для ВДП, некачественных электродов при обычной сварке, или неоднородности других материальных потоков, как-то, применяемых газов, шлаков, флюсов, отклонения в работе приводов механизмов ЭТУ, сварочных постов, несовершенства наладки автоматизированных систем управления, различной квалификации операторов и др.
Адаптационная система управления одноэлектродной ЭТУ для высокоточных процессов работает следующим образом (см. фиг. 2).
С головки 1 электрододержателя одноэлектродной ЭТУ 2 для особо точных процессов сигнал, пропорциональный перемещениям электрода, поступает в датчик 4 длины 1 перемещений.
Сигнал с задатчика 3 времени t с помощью сигнала от генератора 31 импульсов ni расквантовывается в блоке 5 на элементарные отрезки времени ti, которые попадают в первый сумматор 6, первый квадратичный блок 7 и в первый блок 9 умножения liti на второй вход которого поступает электрический сигнал, пропорциональный элементарным перемещениям длины электрода li, полученным в блоке 13 путем квантования длины 1 от блока 4 импульсным сигналом с генератора 31 тактовых импульсов ni. Электрический сигнал с блока 13 элементарных длин li перемещений электрода через третий сумматор 14 разветвляется на два сигнала, пропорциональных Σli: один поступает на второй блок 11 умножения, а другой на четвертый блок 21 умножения. С первого сумматора 6 пропорциональные сумме элементарных отрезков времени квантования Σti электрические сигналы поступают: первый - через третий блок 12 умножения и первый блок 16 масштабирования и пропорциональный  на первый блок 17 вычитания; второй - через второй квадратичный блок 10 и четвертый блок 25 масштабирования, пропорциональный
на первый блок 17 вычитания; второй - через второй квадратичный блок 10 и четвертый блок 25 масштабирования, пропорциональный  на третий блок 24 вычитания; третий - через второй блок 11 умножения и второй блок 20 масштабирования, пропорциональный
на третий блок 24 вычитания; третий - через второй блок 11 умножения и второй блок 20 масштабирования, пропорциональный  на второй блок 18 вычитания. Электрический сигнал с первого квадратичного блока 7, пропорциональный ti 2, поступает на второй сумматор 8, а после него разветвляется на два сигнала, пропорциональных Σt
на второй блок 18 вычитания. Электрический сигнал с первого квадратичного блока 7, пропорциональный ti 2, поступает на второй сумматор 8, а после него разветвляется на два сигнала, пропорциональных Σt поступает на первый 19 и второй 23 блоки деления.
поступает на первый 19 и второй 23 блоки деления.
От первого блока 9 умножения электрический сигнал через четвертый сумматор 15 разветвляется на два одинаковых сигнала, пропорциональных Σliti, - первый поступает на третий блок 12 умножения, а второй сигнал через второй блок 18 вычитания, где становится пропорциональным  , приходит на первый блок 19 деления.
, приходит на первый блок 19 деления.
С первого блока 19 деления электрический сигнал, пропорциональный первому коэффициенту регрессии "x", поступает на вход пятого блока 26 умножения, на второй вход которого поступает электрический сигнал, пропорциональный времени измерения t адаптации управления от задатчика 3 времени t.
С первого блока 17 вычитания электрический сигнал через второй блок 23 деления, становясь пропорциональным второму коэффициенту регрессии "y", поступает на вход пятого сумматора 27, где в совокупности c электрическим сигналом, поступающим от пятого блока 26 умножения, формируется комплексный сигнал адаптационного управления A, пропорциональный 2tx + y.
Электрические сигналы от генератора 31 тактовых импульсов складываются в шестом сумматоре 32 и поступают в первый 16, второй 20, третий 22 и четвертый 25 блоки масштабирования.
Комплексный адаптационный сигнал управления A с пятого сумматора 27 через блок 28 сравнения, в котором сравнивается с заданным по программе аналогичным электрическим сигналом, и при возникновении отклонения ΔA поступает на исполнительный блок 29 источника 30 питания, который изменяет электрический ток, подводимый от источника 30 питания на головку 1 электрододержателя в сторону устранения возникшего рассогласования.
Реализуемость адаптационной системы управления одноэлектродной ЭТУ для высокоточных процессов не вызывает сомнений, так как все использованные в ней блоки: генератор тактовых импульсов, квантования, сумматоры, вычитания, деления, квадратичные, т.е. умножения уровня электрического сигнала самого на себя, масштабирования и др., известны и могут быть выполнены на современных микросхемах (см., например, [4]).
Применение патентуемой адаптационной системы управления одноэлектродной ЭТУ для особо точных процессов позволило реализовать плазменные, электрошлаковые, сварочные технологии, до сих пор требовавшие от трех и более составляющих технологических приемов из-за особо высокой точности процесса, что, в частности, на процессе плазменного монтажа специальных трубопроводов позволило получить экономический эффект 1,842 млн. руб. в год при снижении расхода электроэнергии на 12,4% с увеличением производительности в 2,2 раза.
Список литературы
1. Пирожников В.Е. Автоматизация электросталеплавильного производства.- М.: Металлургия, 1985, с. 152-153.
2. Кендалл М. Дж. , Стьюарт А. Статистические выводы и связи. Пер. с англ.- М.: Мир, 1973.
3. Рао С.Р. Линейные статистические методы и их применения. Пер. с англ. - М.: Мир, 1968.
4. Под ред. Б.В. Тарабрина. Справочник "Интегральные микросхемы".- М.: Энергоатомиздат, 1985.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ОДНОФАЗНОЙ ИНДУКЦИОННОЙ УСТАНОВКОЙ ДЛЯ ПАЙКИ ТРУБОПРОВОДОВ МАЛОГО ДИАМЕТРА | 2000 |
|
RU2159991C1 |
| Автоматизированная адаптивная система управления рудновосстановительной электропечи | 1989 |
|
SU1806448A3 |
| Автоматизированная система управления рудовосстановительной электропечи | 1986 |
|
SU1401242A1 |
| Автоматизированная система управления рудовосстановительной электропечи | 1981 |
|
SU954770A1 |
| СПОСОБ КОМБИНИРОВАННОЙ ПЛАЗМЕННОЙ ОБРАБОТКИ ТОНКОСТЕННЫХ ЦИЛИНДРОВ ИЗ СЛОЖНОЛЕГИРОВАННЫХ СТАЛЕЙ | 2001 |
|
RU2206633C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ВЫРАЩИВАНИЯ ПТИЦЫ | 2007 |
|
RU2340172C1 |
| Устройство для электрических ускоренных испытаний установок резистивного нагрева переменным током | 1989 |
|
SU1771087A1 |
| СПОСОБ УПРАВЛЕНИЯ РЕЖИМОМ РАБОТЫ ЭЛЕКТРОДВИГАТЕЛЕЙ МАГИСТРАЛЬНЫХ НАСОСОВ НЕФТЕПЕРЕКАЧИВАЮЩЕЙ СТАНЦИИ МАГИСТРАЛЬНОГО НЕФТЕПРОВОДА (НПС МН) | 2004 |
|
RU2274943C1 |
| Устройство для управления симметрирующими элементами электрической сети, питающей несимметричную нагрузку | 1979 |
|
SU1001307A1 |
| Способ управления процессом контактной точечной сварки и устройство для его осуществления | 1986 |
|
SU1362591A1 |
Изобретение может быть использовано в электротермии, конкретнее электротермической установкой в системах управления одноэлектродной (ЭТУ) для высокоточных процессов, например, при плазменной обработке материалов, обычной, электрошлаковой сварке с применением электродов сравнительно небольших диаметров. Техническим результатом является обеспечение особо точного управления путем адаптации системы управления к быстроменяющимся случайным факторам воздействия на техпроцесс. Адаптационная система управления одноэлектродной ЭТУ для высокоточных процессов содержит датчик длины перемещения электрода, подключенный к головке электрододержателя установки, задатчик времени, блок сравнения, соединенный с исполнительным блоком управления источником питания. Между датчиками длины перемещения электрода, задатчиком времени и блоком сравнения дополнительно подключены блоки квантования временных интервалов, измерения элементарных длин перемещений электрода, генератор тактовых импульсов, шесть сумматоров, два квадратичных блока, пять блоков умножения, три блока вычитания, четыре масштабирующих блока и два блока деления. Дополнительная система блоков и связей между ними формирует адаптивный к помехам сигнал, отражающий эмпирическую линию регрессии перемежающихся во времени и по направлению движений электрода ЭТУ. 2 ил.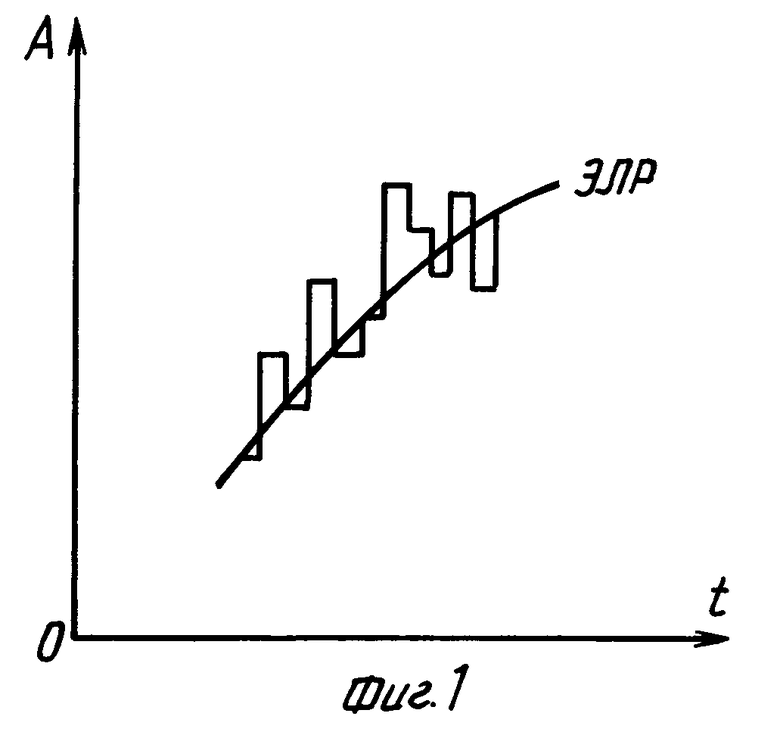
Адаптационная система управления одноэлектродной электротермической установкой (ЭТУ) для высокоточных процессов, содержащая датчик длины перемещения электрода, подключенный к головке электрододержателя установки, задатчик времени, блок сравнения, соединенный с исполнительным блоком управления источником питания, отличающаяся тем, что между датчиками длины перемещения электрода, задатчиком времени и блоком сравнения дополнительно подключены блоки квантования временных интервалов, измерения элементарных длин перемещений электрода, генератор тактовых импульсов, шесть сумматоров, два квадратичных блока, пять блоков умножения, три блока вычитания, четыре масштабирующих блока и два блока деления, причем к головке электрододержателя одноэлектродной ЭТУ подключен датчик длины перемещения электрода; запитанный от задатчика времени и от генератора тактовых импульсов блок квантования временных интервалов соединен своими тремя выходами: с первым сумматором, первым квадратичным блоком, выход которого соединен со вторым сумматором, а третий выход блока квантования временных интервалов соединен с первым блоком умножения; первый сумматор своими тремя выходами соединен со вторым квадратичным блоком, вторым и третьим блоками умножения; блок измерения элементарных длин перемещения электрода, запитанный от датчика длины перемещения электрода и от генератора тактовых импульсов, своими двумя выходами соединен с первым блоком умножения, а через третий сумматор - со вторым блоком умножения; четвертый сумматор, запитанный с выхода первого блока умножения, своими двумя выходами соединен: первым через третий блок умножения и первый блок масштабирования с первым блоком вычитания, а вторым выходом через второй блок вычитания - с первым блоком деления; второй блок умножения через второй блок масштабирования подключен к второму входу второго блока вычитания; четвертый блок умножения, запитанный от выходов третьего сумматора и от второго сумматора, подсоединен через третий блок масштабирования и первый блок вычитания на вход второго блока деления; третий блок вычитания, запитанный от второго сумматора и через четвертый масштабирующий блок от второго квадратичного блока, соединен двумя своими выходами с первым и вторым блоками деления; пятый блок умножения, запитанный своими входами от задатчика времени и первого блока деления, выходом включен на первый вход пятого блока суммирования, второй вход которого подключен от второго блока деления; выход пятого блока суммирования через блок сравнения и исполнительный блок соединен с источником питания, который питает электрическим током головку электрододержателя одноэлектродной ЭТУ для высокоточных процессов; генератор тактовых импульсов через шестой сумматор своими четырьмя выходами соединен с первым, вторым, третьим и четвертым блоками масштабирования.
| Регулятор мощности дуговой электропечи | 1980 |
|
SU989756A1 |
| Устройство для автоматического регулирования скорости переплава электрода в вакуумной электродуговой печи | 1987 |
|
SU1473090A1 |
| Устройство для определения длины электрода дуговой сталеплавильной печи | 1988 |
|
SU1614141A1 |
| DE 3544005 A1, 19.06.1987 | |||
| US 5708627 A, 13.01.1998 | |||
| ЛОТОВЫЙ ИЗМЕРИТЕЛЬ УРОВНЯ | 2012 |
|
RU2536089C2 |
| 3D-FACS-АНАЛИЗ-ADCC NK-КЛЕТОК | 2011 |
|
RU2577702C2 |
