Изобретение относится к области сельского хозяйства, а именно к агромостовым комплексам.
Известен агрокомплекс, содержащий мостовой агрегат, снабженный датчиками, взаимодействующими с опорными реперами, закрепленными на нитях прямолинейных колей агроугодья (SU 1782367, кл. A 01 B 49/00, 1992).
Недостаток этого комплекса заключается в том, что для культивации поперечных рядков растений агромост нужно развертывать на 90o либо проводить культивацию поперечных рядков, используя агромост в старт-стопном режиме, что низкопроизводительно. Наиболее близким изобретением к предложенному является агрокомплекс, содержащий агромост, снабженный датчиками, взаимодействующими с опорными реперами, выполненными на проволоках, натянутых вдоль колей агромоста (RU 2109423, кл. A 01 B 49/00, 1998).
Недостатком данного агрокомплекса является невозможность выполнять вдольрядную и поперечно-рядную культивацию за один проход агромоста.
Задача изобретения - обеспечение вдоль рядной и поперечно-рядной культивации растений, возделываемых рядками или квадратно-гнездовым методом за один проход агромоста вдоль рядов растений.
Технический результат - повышается производительность труда. Технический результат достигается тем, что агромост агромостового комплекса для культивации растений, посаженных рядками или квадратно-гнездовым способом, имеет культиваторные ножи, закрепленные на рычагах, с возможностью колебательного движения в направлении, перпендикулярном движению агромоста, а натянутые вдоль колей проволоки имеют реперные метки, выполненные с шагом, равным шагу квадратно-гнездовой посадки, а рычаги с культиваторными ножами по команде датчиков совершают колебательные движения, при этом агромост имеет неподвижно закрепленные культиваторные лапы для культивации междурядий, причем культиваторные лапы и культиваторные ножи имеют двустороннюю заточку.
На фиг. 1 изображен фронтальный вид агромоста с орудиями для культиваторных работ.
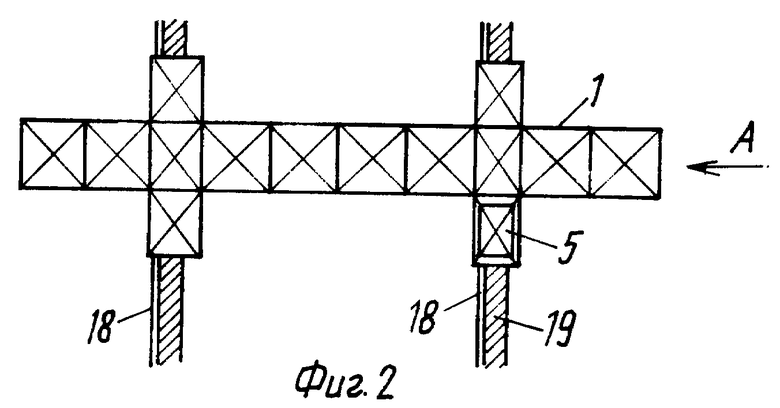
На фиг. 2 - то же, вид сверху.
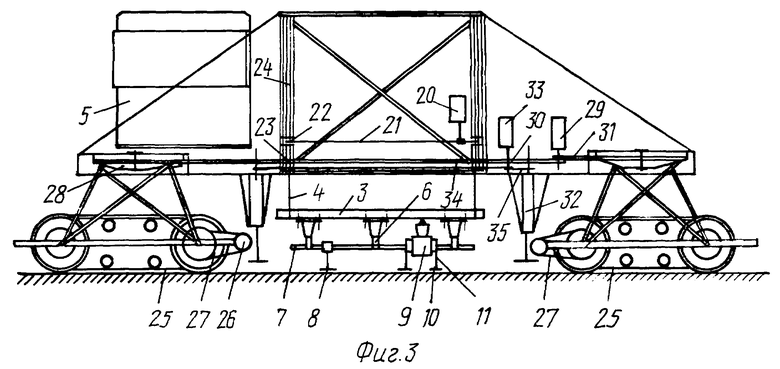
На фиг. 3 - вид агромоста с торца по стрелке А на фиг. 2.
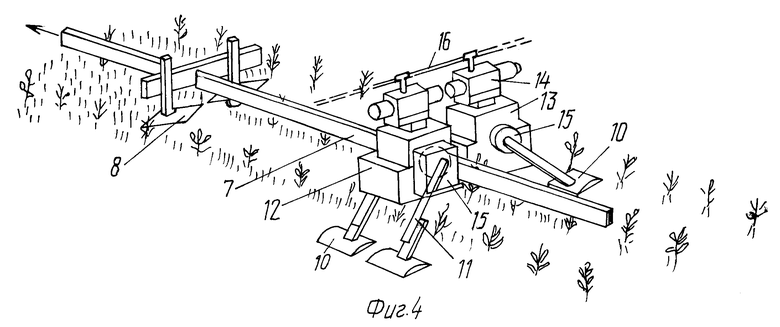
На фиг. 4 - вид одной из штанг с закрепленными на ней неподвижными культиваторными лапами для культивации двух продольных междурядий и устройством с рычагами и культиваторными ножами для поперечно-рядной культивации растений, возделываемых в рядках или квадратно-гнездовым методом.
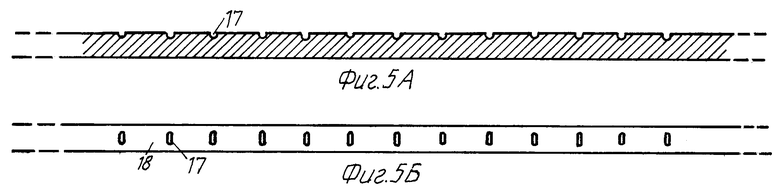
На фиг. 5А - продольный разрез проволоки через реперные метки; 5Б - то же, вид проволоки с реперными метками.
Агромостовой комплекс имеет агромост, состоящий из фермы 1, опирающейся на самоходные тележки 2, рам 3, подвешенных на вертикальных штангах 4, кабину 5 с вспомогательным оборудованием. На рамах 3 подвешены несущие брусья 6, на которых закреплен ряд параллельных штанг 7, несущих закрепленные на них неподвижные культиваторные лапы 8 и устройство 9 с культиваторными ножами 10, закрепленными на рычагах 11, совершающих колебательные движения в направлении, перпендикулярном движению агромоста, по командам датчиков. Культиваторные лапы 8 и ножи 10 имеют двустороннюю заточку. Каждое устройство 9 привода рычагов 11 содержит закрепленные на штангах 7 блоки 12, 13, золотниковые гидрораспределители 14, гидроприводы 15, кабель 16, подключенный к электронному блоку, расположенному в кабине и подающему импульсы на срабатывание ножей 10 по сигналам датчиков /не показаны/, с шагом, равным шагу квадратно-гнездовой посадки, выполненными на стальных проволоках 18, натянутых вдоль колей 20 агромоста.
Устройство 9 привода культиваторных ножей работает от автономной гидросистемы с отдельным гидронасосом, работающим от специального мотор-редуктора, размещенного в кабине /не показан/.
Подъем и заглубление культиваторных ножей и лап выполняется мотор-редуктором 20 через цепь 21, которая охватывает все звездочки 22, внутренняя резьба которых взаимодействует с резьбой на четырех вертикальных штангах 4, перемещая их по надобности вверх и вниз. Штанги движутся в защитных кожухах, состоящих из двух 23, 24 кусков труб, закрепленных на ферме агромоста.
Ходовые тележки имеют гусеницы 25, приводимые мотор-редукторами 26 через цепи 27. Тележки закреплены на поворотных кругах 28, развороты которых выполняются от одного мотор-редуктора 29 через цепи 30, 31. Агромост снабжен двумя домкратами 32, приводимыми от моторредуктора 33 через цепи 34, 35.
Агромостовой комплекс используется следующим образом.
В зависимости от расстояний между растениями при квадратно-гнездовой посадке, а также в зависимости от расстояний между рядами растений, например между рядами сахарной свеклы, на несущих брусьях 6 крепят соответствующее количество штанг 7, на которых закреплены культиваторные лапы 8 и устройства 9 с культиваторными ножами 10. Величину заглубления культиваторных лап и ножей 10 устанавливают мотор-редукторами 20, на которые оператор, находящийся в кабине, подает электроэнергию. Ширина культиваторных лап 8 и ножей 10 выбирается исходя из размеров тех защитных зон, которые желают оставить около возделываемых растений. Во время движения агромоста лапы 8 подрезают сорняки и рыхлят землю между продольными рядами, а срабатывающие по сигналам от меток 17 ножи 10 уничтожают сорняки и рыхлят землю между растениями в рядках.
При нормальной работе агромоста, когда сигналы от обеих проволок 18 в электронную схему приводят одновременно и когда гусеницы обеих тележек агромоста идут точно по серединам постоянных грунтовых колей - оператор в работу агромоста не вмешивается.
Когда гусеницы агромоста начинают смещаться с середины колей, то вмешивается оператор: он подает кратковременно энергию на реверсивный мотор-редуктор 29 своей тележки, являющейся ведущей, и гусеницы тележки, не изменяя скорости движения, начинают медленно развертываться в нужную сторону, смещаясь к центру колеи. При этом смещаются к центру колеи и гусеницы второй тележки, гусеницы которой могут при этом оставаться в перпендикулярном положении относительно фермы 1 агромоста. Оператор может поступать и иным способом: подавать импульсы тока в мотор-редукторы 29 обеих тележек, при этом все четыре гусеницы агромоста слегка повертываются в ту или иную сторону.
Когда сигналы от реперов 17 начинают приходить в электронную схему не одновременно, то на рассогласование начинает реагировать автоматический вариометр напряжения - начинает подавать на мотор-редукторы 26 ведущей тележки повышенное или пониженное напряжение, что начинает плавно и медленно изменять в нужную сторону скорость движения главной /или ведущей/ тележки, что и устраняет рассогласование.
Сделав один гон вдоль всего агроугодья, оператор одновременно прекращает подачу энергии на все метор-редукторы 26, т.е. останавливает агромост, а затем поочередно принимает ходовые тележки домкратами 32, развертывает гусеницы на 90o и переезжает на соседний участок агроугодья, где снова развертывает гусеницы и начинает обратный гон. При этом нужно только развернуть пульт и кресло оператора на 180o и не трогать культиваторные ножи и лапы, поскольку они имеют двустороннюю заточку. При смене сельхозорудий агромост может выполнять многие другие сельхозработы.
| название | год | авторы | номер документа |
|---|---|---|---|
| АГРОМОСТ | 2001 |
|
RU2196401C2 |
| АГРОМОСТ | 1999 |
|
RU2160517C1 |
| АГРОМОСТ | 2001 |
|
RU2189710C1 |
| АГРОКОМПЛЕКС | 1997 |
|
RU2109423C1 |
| АГРОМОСТОВОЙ КОМПЛЕКС | 1994 |
|
RU2067798C1 |
| ТЕПЛИЧНЫЙ АГРОМОСТ | 2000 |
|
RU2186483C2 |
| АГРОКОМПЛЕКС | 2005 |
|
RU2283558C1 |
| АГРОМОСТ | 2000 |
|
RU2178960C2 |
| АГРОМОСТ | 1999 |
|
RU2163428C2 |
| СПОСОБ ВЫПОЛНЕНИЯ СЕТИ ОПОРНЫХ РЕПЕРОВ ДЛЯ УПРАВЛЕНИЯ РАБОТОЙ АГРОМОСТА | 1998 |
|
RU2128414C1 |
Агромостовой комплекс содержит агромост, снабженный датчиками, взаимодействующими с опорными реперами, выполненными на проволоках, натянутых вдоль колей агромоста. Агромост имеет культиваторные ножи, закрепленные на рычагах с возможностью колебательного движения в направлении, перпендикулярном движению агромоста. Натянутые вдоль колей проволоки имеют реперные метки, выполненные с шагом, равным шагу квадратно-гнездовой посадки, взаимодействующие с датчиками, по команде которых рычаги с культиваторными ножами совершают колебательные движения. Агромост имеет неподвижно закрепленные культиваторные лапы для культивации междурядий, причем культиваторные ножи имеют двустороннюю заточку. Повышается производительность труда. 6 ил.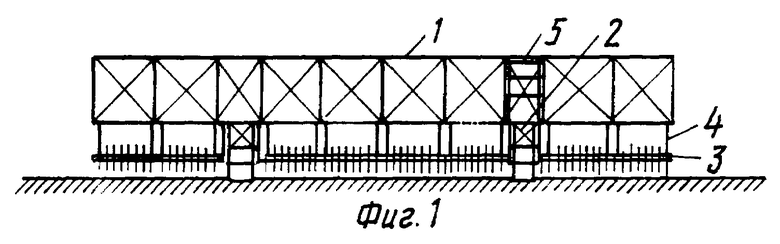
Агромостовой комплекс для культивации растений, посаженных рядками или квадратно-гнездовым методом, содержащий агромост, снабженный датчиками, взаимодействующими с опорными реперами, выполненными на проволоках, натянутых вдоль колей агромоста, который имеет культиваторные ножи, закрепленные на рычагах с возможностью колебательного движения в направлении, перпендикулярном движению агромоста, а натянутые вдоль колей проволоки имеют реперные метки, выполненные с шагом, равным шагу квадратно-гнездовой посадки, а рычаги с культиваторными ножами по команде датчиков совершают колебательные движения, при этом агромост имеет неподвижно закрепленные культиваторные лапы для культивации междурядий, причем культиваторные лапы и культиваторные ножи имеют двустороннюю заточку.
| АГРОКОМПЛЕКС | 1997 |
|
RU2109423C1 |
| СПОСОБ ВЫПОЛНЕНИЯ СЕТИ ОПОРНЫХ РЕПЕРОВ ДЛЯ УПРАВЛЕНИЯ РАБОТОЙ АГРОМОСТА | 1998 |
|
RU2128414C1 |
| АГРОМОСТ ИВАНА МАЙСОВА | 1991 |
|
RU2031560C1 |
| Пропашник с качающимися и неподвижными рабочими органами | 1933 |
|
SU40068A1 |
| Пропашник с качающимися рабочими органами | 1932 |
|
SU34221A1 |
| Рабочий орган культиватора-плоскореза | 1985 |
|
SU1380628A1 |

