Изобретение относится к авиационно-ракетной технике, в частности к способам выведения авиационно-космических систем для доставки на низкие и средневысокие околоземные орбиты различных полезных грузов, например спутников связи, навигации, мониторинга, в том числе экологического, а также для оперативной доставки полезных грузов в отдаленные точки Земли и Мирового океана.
Известен способ выведения полезных грузов (ПГ) с помощью воздушно-космической системы (ВКС), содержащей самолет-носитель (СН), промежуточную разгонную ступень и ПГ в виде орбитального самолета.
Способ предусматривает горизонтальный полет СН, набор высоты порядка 20 км, разгон до скорости полета 800 -1100 км/ч, по достижении которых включаются двигатели промежуточной разгонной ступени, отделяющие ее от СН и осуществляющие разгон и доставку ПГ в заданную точку траектории, после чего ПГ отделяется от разгонной ступени (Патент РФ N 2061630, МКИ6 B 64 G 1/14).
Недостатком этого способа является опасность запуска промежуточной разгонной ступени до ее отделения от СН, а также невозможность достижения потенциальной грузоподъемности всей системы из-за запуска разгонной ступени в режиме горизонтального полета СН.
Известен способ выведения, включающий горизонтальный старт системы, состоящей из планера с топливными баками и отделяемого от него летательного аппарата (ЛА) с двигательной установкой.
Данный способ реализуется следующим образом: горизонтальный старт всей системы осуществляется с помощью двигателей ЛА, питающихся из баков, расположенных на планере; после достижения заданной скорости системой, ЛА отделяется от планера и выходит на заданную траекторию, а планер возвращается на Землю (Патент РФ N 2120398, МКИ6 B 64 G 1/14, заявитель - фирма DASA, Германия).
Этому способу свойственны недостатки вышеописанного способа, а также низкая энергетическая эффективность из-за необходимости использования маршевых двигателей ЛА для разгона с Земли всей системы планера с ЛА, что приводит к неоправданному переутяжелению конструкции ЛА и потере его грузоподъемности.
Известен также способ выведения авиационно-космической системы, описанный в патенте США N 5402965 (МКИ6 B 64 G 1/14), фирмы Rockwell International Corporation. Согласно данному способу самолет-носитель с ракетой-носителем, имеющей в своем составе крылатую первую ступень с ПГ и возвращаемую крылатую последнюю ступень, осуществляет горизонтальный полет к месту запуска РН, отделение РН от СН, запуск РН в заданную точку траектории и отделение от РН возвращаемой крылатой последней ступени. Возвращаемая крылатая последняя ступень выходит на орбиту, выполняет заданную целевую задачу, осуществляет сход с орбиты, аэродинамическое торможение в атмосфере и управляемую горизонтальную посадку на заданный аэродром.
Недостатком этого способа является необходимость применения крылатой первой ступени РН и ее отделение от СН в горизонтальном полете, что соответственно утяжеляет конструкцию первой ступени РН и не позволяет реализовать оптимальные начальные кинематические параметры запуска РН после отделения ее от СН.
Наиболее близким аналогом предлагаемому способу является способ выведения, описанный в патенте США N 4901949 (МКИ6 B 64 C 3/38) фирмы Orbital Sciences Corporation (PCT/US89/00867, 08.03.89) (защищено патентом РФ N 2026798 МКИ6 B 64 D 5/100, F 42 B 15/00).
Данный способ используется для авиационно-космической системы, содержащей СН, трехступенчатую РН с крылатой первой ступенью и ПГ.
Способ заключается в том, что осуществляется разгон РН к месту ее запуска на траектории полета СН, причем направление полета СН совпадает с направлением запуска РН, горизонтальное отделение РН от СН, включение двигательной установки первой ступени производят после отделения и отставания РН от СН при горизонтальном положении РН, осуществляют разгон РН с использованием аэродинамической подъемной силы крылатой первой ступени и силы тяги ее двигателей, после чего отделяют крылатую первую ступень и запускают вторую ступень.
Одним из недостатков этого способа выведения является необходимость использования крыла на первой ступени РН, что утяжеляет ее конструкцию, усложняет управление одновременно аэродинамическими и реактивными исполнительными органами. Включение двигательной установки первой ступени в горизонтальном положении РН не позволяет реализовать предшествующий отделению РН от СН оптимальный маневр СН для получения расчетных кинематических параметров движения (высота, скорость, угол восхождения), обеспечивающих максимальную грузоподъемность РН в заданной точке траектории выведения.
Задачей изобретения являются повышение грузоподъемности авиационно-космической системы при выведении полезного груза в космос, любую точку Земли или Мирового океана, обеспечение надежного разделения РН от СН, обеспечение безопасности СН и его экипажа при включении маршевых двигателей первой ступени РН, снижение стоимости запуска полезного груза.
Эта задача достигается тем, что в способе управления авиационно-космической системой для выведения полезного груза, включающем старт самолета-носителя с ракетой-носителем и полезным грузом на борту с аэродрома базирования, его полет в район запуска РН, отделение и отставание ракеты-носителя от самолета-носителя с последующим запуском ракеты-носителя в заданную точку траектории и отделение полезного груза от ракеты-носителя, на максимальном крейсерском режиме полета самолета-носителя в районе запуска ракеты-носителя осуществляют пикирование самолета-носителя для набора максимально допустимой горизонтальной скорости полета, в момент достижения этой скорости самолетом-носителем осуществляют кабрирование с максимально допустимым углом атаки, заканчивающееся переходом на угол атаки, обеспечивающий значение нормальной перегрузки, близкой к нулю, при этом упомянутые параметры кабрирования выбирают соответствующими достижению в заданный момент tp точки полета, где расчетные скорость Vp, высота Hp и наклон траектории полета θp обеспечивают максимальный выводимый ракетой-носителем полезный груз, а также последующий полет самолета-носителя с допустимыми параметрами как после отделения ракеты-носителя, так и в случае аварийного неотделения ракеты-носителя, после достижения самолетом-носителем в расчетный момент времени tp точки полета с параметрами Vp, Hp, θp и нормальной перегрузки, близкой к нулю, отделяют ракету-носитель от самолета-носителя, сообщая ракете-носителю скорость относительно самолета-носителя, равную расчетной скорости отставания ракеты-носителя от самолета-носителя на безопасное расстояние к моменту включения маршевых двигателей ракеты-носителя, а перед запуском ракеты-носителя в заданную точку траектории осуществляют разворот ракеты-носителя с полезным грузом в положение, отличающееся от вертикального на угол 10-30o в вертикальной плоскости в направлении выведения.
Разворот ракеты-носителя перед ее запуском с полезным грузом в заданную точку траектории осуществляют с помощью маршевых двигателей после их включения, или разворот ракеты-носителя перед ее запуском с полезным грузом в заданную точку траектории осуществляют с помощью дополнительной реактивной установки до включения маршевых двигателей. Отделение ракеты-носителя от самолета-носителя производят, стабилизируя положение самолета-носителя в инерциальной системе координат.
Задачей предлагаемого изобретения является повышение грузоподъемности авиационно-космической системы при выведении ПГ, обеспечение надежного разделения РН от СН, обеспечение безопасности СН и его экипажа при включении маршевых двигателей первой ступени РН, снижение стоимости разработки авиационно-космической системы и стоимости запуска ПГ.
Сущность изобретения поясняется на схеме управления полетом авиационно-космической системы, представленной на чертеже, где
1 - самолет-носитель с РН и ПГ на борту;
2 - ракета-носитель;
3 - полезный груз;
4 - горизонтальный старт СН с аэродрома базирования;
5 - участок полета СН в район запуска РН;
6 - участок полета СН на максимальном крейсерском режиме;
7 - участок пикирования СН и набор максимально допустимой горизонтальной скорости полета;
8 - участок кабрирования СН с максимально допустимым углом атаки;
9 - участок уменьшения угла атаки СН и выход на режим полета с нормальной перегрузкой, близкой к нулю (0-0,2 от силы тяжести);
10 - участок пассивного полета РН и отставания РН от СН на заданное расстояние;
11 - участок разворота РН по тангажу и достижение оптимального угла тангажа для запуска РН с ПГ в заданную точку траектории полета;
12 - участок активного полета первой ступени РН;
13 - участок активного полета последней ступени РН;
14 - отделение ПГ от РН;
15 - траектория полета СН на аэродром посадки после десантирования РН с ПГ;
16 - траектория полета СН на аэродром посадки при несостоявшемся десантировании РН с ПГ;
17 - аэродром посадки СН;
18 - точка достижения района запуска РН;
19 - точка начала маневра пикирования;
20 - точка достижения максимально допустимой горизонтальной скорости полета СН;
21 - точка начала уменьшения угла атаки СН;
22 - точка достижения в заданный момент времени tp расчетных значений скорости Vp, высоты Hp и наклона траектории полета θp, достижения нормальной перегрузки СН, близкой к нулю, и последующего десантирования РН с заданной скоростью отставания относительно СН;
23 - точка достижения РН заданного безопасного расстояния относительно СН и начала разворота РН по тангажу;
24 - точка достижения оптимального угла тангажа РН, отличающегося от вертикального на угол 10-30o в вертикальной плоскости в направлении выведения;
25 - точка слива компонентов топлива РН за борт СН (при несостоявшемся десантировании РН);
26 - точка отделения первой ступени и запуска второй ступени РН;
27 - точка отделения головного обтекателя РН;
28 - точка окончания работы последней ступени РН и отделения ПГ.
Предложенный способ управления полетом авиационно-космической системы реализуется следующим образом:
- после старта СН 1 с РН 2 и ПГ 3 на борту с аэродрома базирования 4 и полета СН в район запуска РН 5, при достижении района запуска, РН (точка 18) самолет-носитель переходит на максимальный крейсерский режим полета (участок 6);
- при достижении расчетной точки 19 полета на максимальном крейсерном режиме СН 1 начинает маневр пикирования и набор максимально допустимой горизонтальной скорости полета (участок 7);
- по достижении максимально допустимой горизонтальной скорости полета (точка 20) СН 1 переходит на режим кабрирования с максимально допустимым углом атаки (участок 8), заканчивающийся переходом (точка 21) на угол атаки, обеспечивающий значение нормальной перегрузки, действующей на СН 1, близкой к нулю (участок 9);
- при достижении в заданный момент времени tp расчетных значений скорости Vp, высоты Hp и наклона траектории полета θp, а также нормальной перегрузки, действующей на СН 1, близкой к нулю (0-0,2 от силы тяжести), осуществляется десантирование РН 2 с заданной скоростью отставания относительно СН (точка 22);
- после десантирования РН 2 и ее отставания от СН 1 в режиме пассивного полета (участок 10) на заданное безопасное расстояние (точка 23) осуществляется разворот РН 2 по тангажу до достижения оптимального угла тангажа для запуска РН 2 с ПГ 3 в заданную точку траектории полета (участок 11). Разворот по тангажу может осуществляться с помощью маршевых двигателей после их включения или с помощью дополнительной реактивной установки до включения маршевых двигателей;
- после достижения оптимального угла тангажа РН, отличающегося от вертикального на угол 10-30o в вертикальной плоскости в направлении выведения (точка 24), осуществляется активный полет первой ступени РН (участок 12), отделение первой ступени РН (точка 26), активный полет последующих ступеней (участок 13), отделение головного обтекателя (точка 27), окончание работы последней ступени (точка 28) и отделение ПГ от РН (участок 14);
- после десантирования РН 2 (точка 22) самолет-носитель осуществляет полет по траектории 15 на аэродром посадки;
- при несостоявшемся десантировании РН 2 с ПГ 3 из СН 1 в заданный момент времени tp (точка 22) самолет-носитель с РН и ПГ на борту осуществляет полет по траектории 16 на аэродром посадки. Для обеспечения безопасности СН 1 и его экипажа на траектории полета 16 осуществляется слив за борт СН 1 компонентов топлива РН (точка 25) и посадка СН на аэродром 17 с незаправленной РН и ПГ.
Техническим результатом предлагаемого изобретения является возможность увеличения стартовой массы РН 2 за счет ее десантирования на режимах полета СН 1 с нормальной перегрузкой, близкой к нулю (режим близкий к невесомости), что позволяет обеспечить балансировку и управляемость СН за счет располагаемых возможностей аэродинамических органов управления в процессе движения РН и сообщения ей расчетной скорости отставания от СН 1.
Увеличение стартовой массы РН 2 и достижение в заданный момент tp расчетных значений скорости Vp, высоты Hp и наклона траектории полета θp, обеспечивающих максимальный выводимый ракетой-носителем полезный груз, за счет последовательных маневров пикирования и кабрирования, позволяют достичь максимальной грузоподъемности авиационно-космической системы при выведении ПГ в космос.
Отделение РН 2 от СН 1 в режиме полета близком к невесомости с сообщением РН заданной скорости относительно СН, равной расчетной скорости отставания РН от СН на безопасное расстояние к моменту включения маршевых двигателей ракеты-носителя, обеспечивают надежное разделение РН и СН с минимальным их нагружением, а также безопасность СН и его экипажа при включении маршевых двигателей первой ступени на безопасном расстоянии.
Предлагаемый способ управления авиационно-космической системой для выведения полезного груза позволяет отказаться от создания аэродинамических органов на РН для управления ее полетом на активных участках (крыло, оперение), что облегчает конструкцию РН, исключает затраты на их разработку, отработку и изготовление и, как следствие, снижает стоимость разработки авиакосмической системы и стоимость запуска ПГ.
Ниже, для примера, приводится вариант исполнения предлагаемого способа управления авиационно-космической системой, использующей в качестве СН тяжелый транспортный самолет АН-124-100 "Руслан" и жидкостную двухступенчатую РН на экологически чистых компонентах топлива, "керосин-жидкий кислород". Ракета-носитель имеет массу 80-100 тонн, управление по каналам тангажа, рыскания и крена осуществляется с помощью маршевых двигателей. Грузоподъемность РН на опорную полярную орбиту составляет 2-3 тонны. Десантирование РН из СН осуществляется с помощью транспортно-пускового контейнера и пневматической системы.
После старта с аэродрома базирования 4 и достижения района запуска РН самолет-носитель переходит на максимальный крейсерский режим полета на высоте около 10 км со скоростью около 830-845 км/ч.
За 35-40 с до расчетного момента десантирования РН самолет-носитель начинает пикирование и через 12-17 с достигает максимально допустимой горизонтальной скорости М = 0,8 - 0,81, при этом высота полета снижается до 9,5 - 9,7 км.
После достижения максимально допустимой горизонтальной скорости СН осуществляет переход на кабрирование с максимально допустимым углом атаки, который на участке кабрирования изменяется от 7o в начале кабрирования до 11,5o к концу, при этом скорость полета снижается до М = 0,62, высота возрастает до 10,5 - 11 км, а угол восхождения траектории достигает 27-29o.
За 3,5-4 с до расчетного момента десантирования СН начинает переход на малые углы атаки и снижение нормальной перегрузки до значений, близких к нулю. При этом углы атаки СН снижаются до 2-2,5o.
При достижении расчетного момента десантирования tp и нормальной перегрузки, близкой к нулю, с помощью пневматической системы десантирования РН выталкивается из транспортно-пускового контейнера с заданной скоростью отставания относительно СН. При этом самолет-носитель имеет расчетные значения скорости Vp = 0,6 М, высоты Hp = 11-11,4 км и угла наклона траектории θp~20-25°, которые обеспечивают максимальный выводимый ракетой-носителем полезный груз, а также последующий полет самолета-носителя с допустимыми параметрами как после отделения РН, так и в случае аварийного неотделения РН.
После 5-6 с пассивного полета и отставания РН на безопасное расстояние от самолета-носителя (около 150 м) включаются маршевые двигатели РН, с их помощью осуществляется разворот РН по тангажу до значений 10-30o от вертикали в вертикальной плоскости в направлении выведения, реализуется активный полет первой ступени, ее отделение, активный полет второй ступени, отделение головного обтекателя, окончание работы второй ступени и отделение ПГ от РН.
После десантирования РН или после несостоявшегося десантирования (аварийный случай) самолет-носитель осуществляет полет на аэродром посадки, причем в аварийном случае осуществляется слив за борт СН компонентов топлива РН и посадка СН с незаправленной РН.
Предлагаемый способ управления позволил реализовать максимально возможную массу ракеты-носителя до 100 тонн, грузоподъемность авиационно-космической системы на опорную (200 км) полярную орбиту до 3 тонн, надежное разделение РН от СН, обеспечить безопасность СН и его экипажа при запуске маршевых двигателей РН, упростить конструкцию ракеты-носителя за счет отказа от авиационных элементов (крыла, оперения) и снизить стоимость разработки и запуска ПГ.
Изобретение относится к авиационно-ракетной технике, в частности к способам выведения полезных грузов (ПГ) на низкие и средние околоземные орбиты по схеме воздушного старта ракеты-носителя с самолета-носителя. В предлагаемом способе после прилета на максимальном крейсерском полете в район запуска осуществляют пикирование самолета-носителя, и в момент набора им максимально допустимой скорости полета - кабрирование с максимально допустимым углом атаки. Затем переходят на угол атаки, дающий близкую к нулю перегрузку (невесомость). Параметры кабрирования таковы, что самолет в момент отделения от него ракеты с ПГ имеет скорость, высоту и наклон траектории полета, дающие максимум выводимого ПГ, а нормальную перегрузку - близкую к нулю. При отделении сообщают ракете скорость отставания от самолета на безопасное расстояние к моменту включения ее маршевых двигателей. С помощью этих двигателей, или до их включения (дополнительными двигателями), разворачивают ракету с ПГ на угол 10-30° к вертикали в направлении выведения. При отделении ракеты стабилизируют самолет-носитель в инерциальной системе координат. Изобретение повышает надежность и экономичность доставки ПГ с максимальной грузоподъемностью на орбиту или в заданный район Земли или Мирового океана. 3 з.п.ф-лы, 1 ил.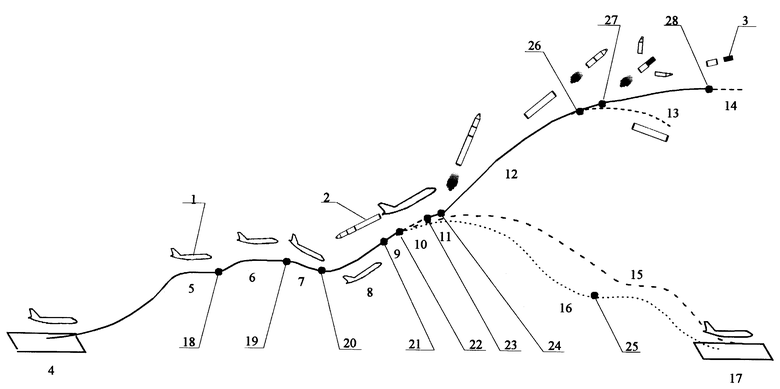
| РАКЕТА-НОСИТЕЛЬ, СБРАСЫВАЕМАЯ С САМОЛЕТА-НОСИТЕЛЯ, И СПОСОБ ЕЕ ЗАПУСКА В ВОЗДУХЕ И УПРАВЛЕНИЕ ПОЛЕТОМ | 1989 |
|
RU2026798C1 |
| СПОСОБ ВЫПОЛНЕНИЯ СТАРТА РАКЕТЫ С САМОЛЕТА | 1992 |
|
RU2068169C1 |
| US 5279199 A, 18.10.1994 | |||
| СПОСОБ ДИСПЕРГИРОВАНИЯ НАНО- И МИКРОЧАСТИЦ, ИХ ЗАКРЕПЛЕНИЕ НА ПОВЕРХНОСТИ ПОЛИМЕРА И УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 2009 |
|
RU2428402C2 |

