Предлагаемое изобретение относится к радиотехнике и может быть использовано в многоканальной радиолокации при определении координат объектов наблюдения, определении экстраполированных координат объектов наблюдения, наведении радиоуправляемых средств, обеспечении многоканальной связи и т.д.
Известны радиоэлектронные системы, в состав которых входят системы контроля интегральных характеристик излучения (диаграммы направленности антенны, уровня ее боковых лепестков, точности установки луча и т.д.), позволяющие определять поврежденные элементы заданного амплитудно-фазового распределения (АФР) на раскрыве антенны (Пат. 4926186 (США), МКИ G 01 R 29/08; Lee J.J., e.a. Near-field probe used as a diagnostic tool to locate defective elements in an array antenna // IEEE Trans. Antennas and ptopag. - 1988. v. 36, N 6, pp. 884-889), а также формировать управляющие воздействия, компенсирующие погрешности реализации АФР (Shnitkin H. Rapid fast fourier transform phase aligment of an electronically scanned antenna. In: Proc. 20th Eur. Microwave Conf. 1990, V. 1, pp. 247-256; Hsiao J.K., Selton J.R. A phased array maintenance monitoring system // Int. Conf. Radar-77, London, 1977, pp. 884-889). Однако в них контроль и компенсация погрешностей реализации заданного АФР осуществляется без учета сигнально-помеховой обстановки.
Известны РЭС, использующие антенны с электрическим сканированием диаграммы направленности (ДН), в которых с помощью специального амплитудного и (или) фазового распределения осуществляется адаптация к помеховой обстановке путем формирования провалов ДН в направлениях на помехи (Пат. 4599622 (США), МКИ G 01 S 5/02, 3/16; Пат. 4063250 (США), МКИ H 01 Q 3/26; Haupt R.L. Simultaneous nulling in the sun and difference patterns monopulse antenna. // IEEE Trans. Antennas and propag. 1984, v. 32, N 5, pp. 486-493 и др.). Недостатком этих устройств является то, что в каждом из них формирование адаптивного к помехам АФР осуществляется в соответствии определенным алгоритмом, который позволяет рассчитывать весовые коэффициенты в каналах управления антенны в соответствии с определенным критерием оптимизации, каждый из которых применим лишь в для ограниченного количества вариантов условий использования РЭС.
Этот недостаток устранен в известном устройстве интеллектуальной многоканальной РЭС (Sandler S. S. , Kokar M. Intelligent antennas. // U.R.S.I.: Symp. Int. Electromagn. Theory. Budapesht, 1986, pt. A, pp. 159-161), которое является наиболее близким к предполагаемому изобретению и выбрано в качестве прототипа.
Известная интеллектуальная многоканальная РЭС состоит из N-элементной антенной решетки (АР), каждый элемент которой соединен с соответствующим n-м каналом управления АР (n = 1, N), управляющие входы которых подключены к соответствующим выходам блока управления АФР, а выходы соединены с соответствующими входами суммирующего блока, выход которого подключен к приемо-передающему блоку, выход которого соединен со входом блока обработки сигналов, выход которого подключен к первому входу блока управления, второй вход которого соединен с выходом блока распознавания помеховой обстановки, на третий вход поступают данные, вводимые с пульта оператора РЭС, первый выход соединен с первым входом выбора критериев оптимизации, второй выход является выходом интеллектуальной многоканальной РЭС, а третий выход соединен с первым входом блока выбора алгоритма управления, второй вход которого подключен к выходу блока выбора критериев оптимизации, третий вход соединен с выходом блока хранения алгоритмов адаптации к помехам, а выход подключен ко входу блока управления АФР, первый вход блока распознавания помеховой обстановки подключен к блоку хранения помеховых ситуаций, а на второй вход поступает информация о помехах, второй вход блока выбора критериев оптимизации соединен с выходом блока хранения критериев оптимизации.
Недостаток известного устройства заключается в том, что в этом случае управление функционированием многоканальной РЭС осуществляется без учета ее технического состояния, а также энергетического потенциала и временного ресурса, что приводит к значительному снижению характеристик излучения (повышению погрешности установки луча, снижению уровня главного максимума ДН, повышению уровня боковых лепестков), а также к снижению оперативности управления лучом и в конечном итоге к снижению пропускной способности РЭС.
Целью предполагаемого изобретения является расширение функциональных возможностей интеллектуальной многоканальной РЭС.
Поставленная цель достигается тем, что в интеллектуальную многоканальную РЭС, состоящую из N-элементной антенной решетки (АР), каждый элемент которой соединен с соответствующим n-м каналом управления АР (n = 1, N), управляющие входы которых подключены к соответствующим выходам блока управления АФР, а выходы соединены с соответствующими входами суммирующего блока, выход которого подключен к приемо-передающему блоку, выход которого соединен с первым входом блока обработки сигналов, выход которого подключен к первому входу блока управления, на второй вход которого поступают данные, вводимые с пульта оператора, первый выход соединен со входом блока управления амплитудно-фазовым распределением (АФР), а второй выход является информационным выходом интеллектуальной многоканальной РЭС, блока выбора критериев оптимизации, первый вход которого соединен с выходом блока хранения критериев оптимизации, а выход подключен к первому входу блока выбора алгоритмов управления, второй вход которого соединен с блоком хранения алгоритмов адаптации к помехам, а также блока хранения помеховых ситуаций, дополнительно введен блок встроенного контроля, на вход которого поступает информация о техническом состоянии интеллектуальной многоканальной РЭС, а выход подключен к первому входу блока идентификации обстановки, второй вход которого соединен с выходом блока хранения цифровой карты местности (ЦКМ), третий вход подключен к блоку хранения помеховых ситуаций, на первый вход которого поступают данные о помехах, а второй вход подключен ко второму выходу блока обработки сигналов, второй вход которого соединен с третьим выходом блока управления, четвертый выход которого подключен к управляющему входу приемо-передающего блока, а пятый выход соединен с четвертым входом блока идентификации обстановки, пятый вход которого подключен к первому выходу блока обработки сигналов, шестой вход соединен со вторым входом блока управления, первый выход подключен ко второму входу блока выбора критериев оптимизации, а второй выход соединен с третьим входом блока выбора алгоритмов управления, четвертый вход которого подключен к выходу блока хранения алгоритмов адаптации к дестабилизирующим факторам, пятый вход соединен с выходом блока хранения алгоритмов управления энергетическим потенциалом и характеристиками обнаружения, а выход подключен к третьему входу блока управления.
Наличие отличительных признаков приводит к появлению у предлагаемого устройства нового свойства по сравнению с известными техническими решениями, которое заключается в компенсации снижения характеристик излучения РЭС при воздействии на нее дестабилизирующих факторов (колебания температуры окружающей среды; смена частот излучения; изменения геометрии АР; механические повреждения полотна АР; отказы элементов АР; технологический разброс характеристик каналов управления АР и др.), а также повышении оперативности управления лучом при адаптации РЭС к сигнально-помеховой обстановке, что позволяет считать заявленное решение, обладающим существенными отличиями.
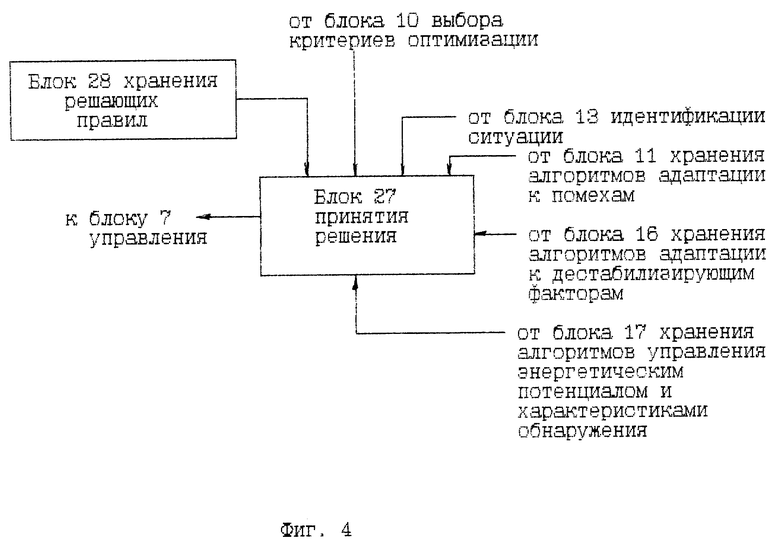
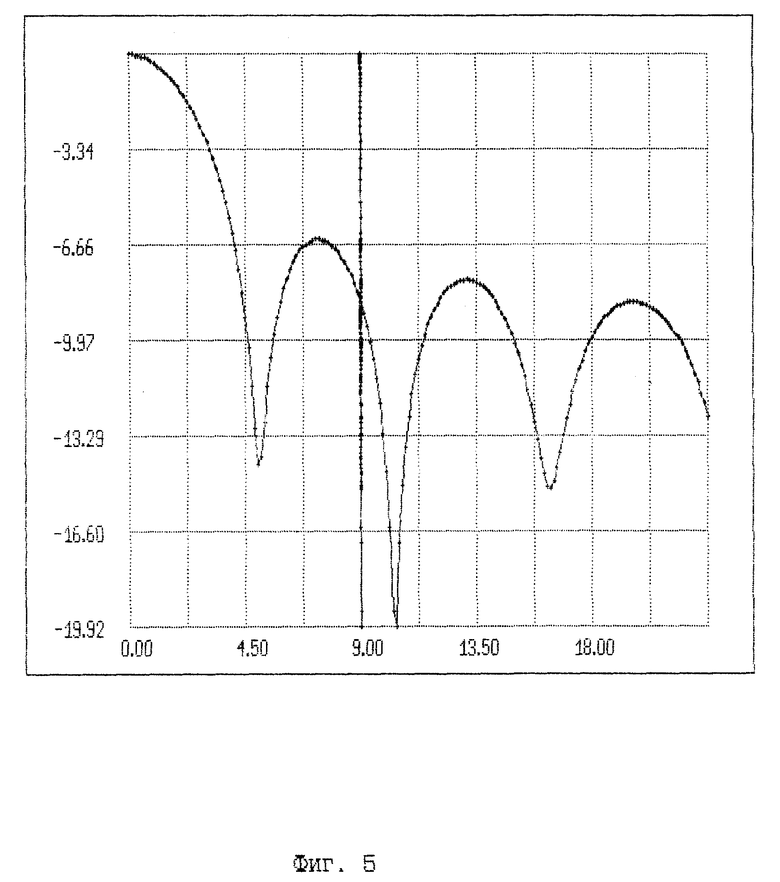
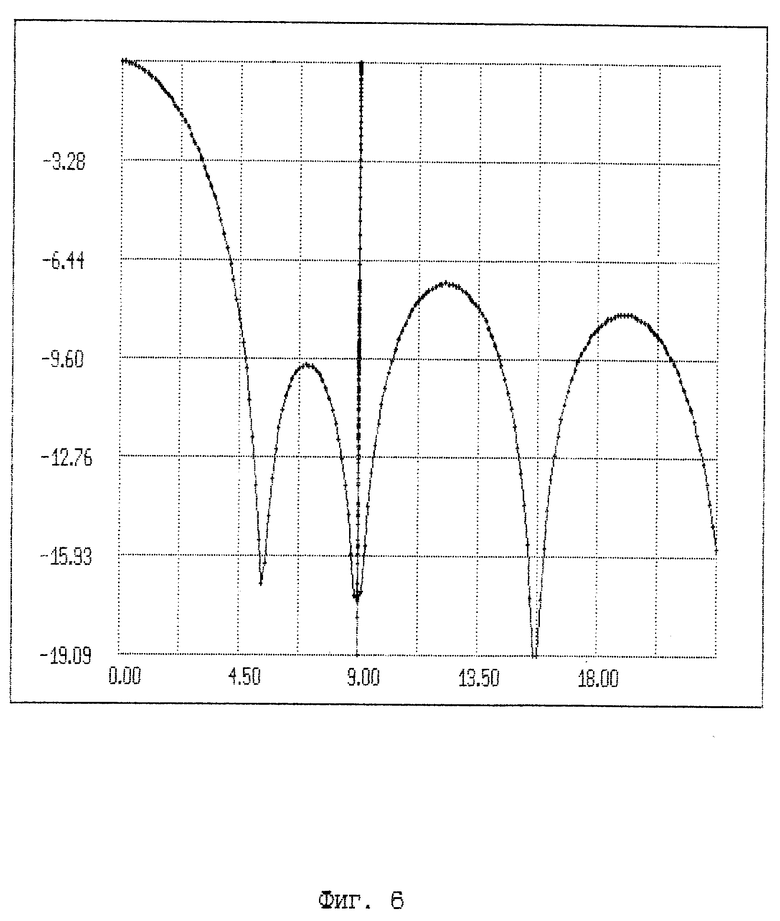
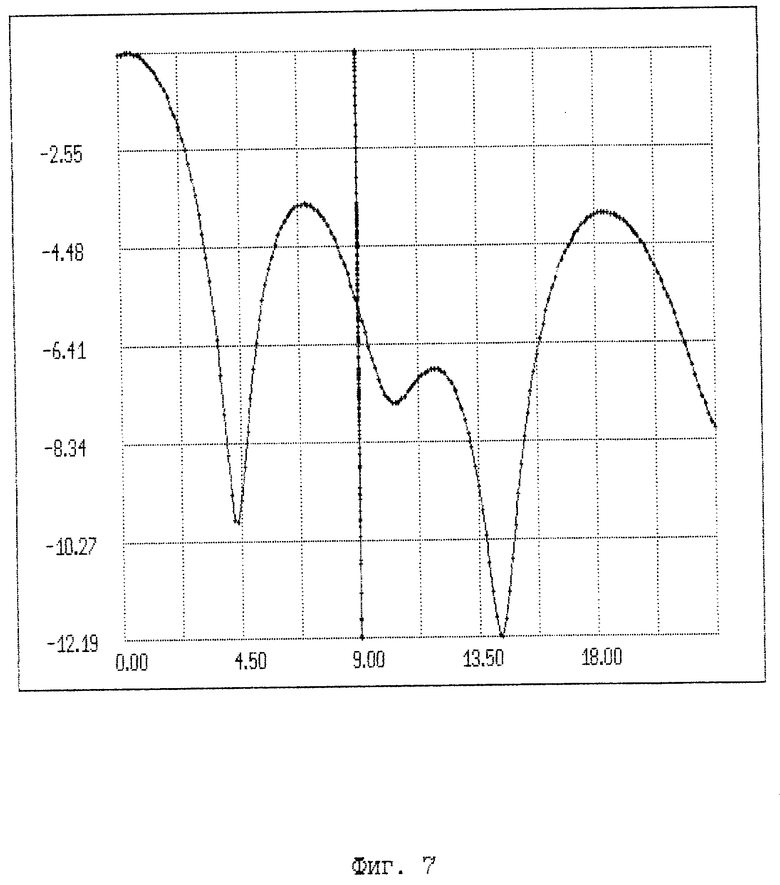
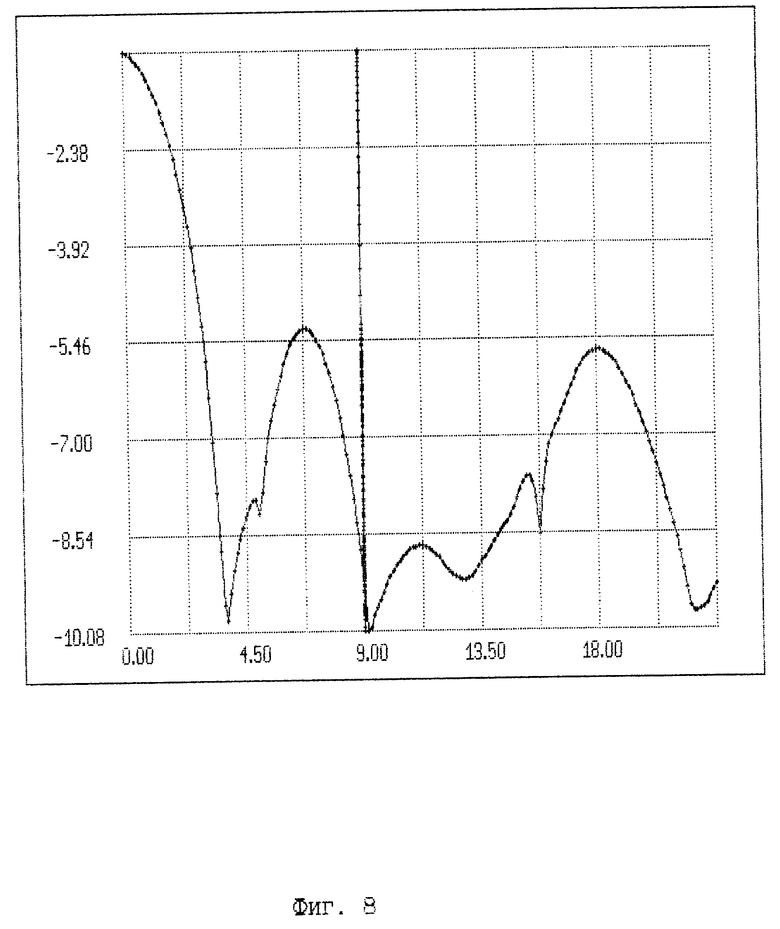
На фиг. 1 приведена структурная схема интеллектуальной многоканальной РЭС; на фиг. 2 - структурная схема блока 5 обработки сигналов; на фиг. 3 - структурная схема блока 13 идентификации обстановки; на фиг. 4 - структурная схема блока 7 выбора алгоритмов управления; на фиг. 5 - диаграмма направленности АР, все каналы управления которой исправны; на фиг. 6 - диаграмма направленности АР устройства-прототипа, все каналы управления которой исправны, после завершения процедуры адаптации к активной помехе; на фиг. 7 - диаграмма направленности АР устройства-прототипа, 30% каналов управления которой вышли из строя; фиг. 8 - диаграмма направленности АР предлагаемого устройства, 30% каналов 2 управления которой вышли из строя.
Устройство содержит N-элементную АР 1, N каналов 2 управления, суммирующий блок 3, приемо-передающий блок 4, блок 5 обработки сигналов, блок 6 выбора алгоритмов управления, блок 7 управления, блок 8 управления АФР, блок 9 хранения критериев оптимизации, блок 10 выбора критериев оптимизации, блок 11 хранения алгоритмов адаптации к помехам, блок 12 хранения помеховых ситуаций, блок 13 идентификации обстановки, блок 14 хранения цифровой карты местности, блок 15 встроенного контроля, блок 16 хранения алгоритмов адаптации к дестабилизирующим факторам, блок 17 хранения алгоритмов управления энергетическим потенциалом и характеристиками обнаружения.
Новым в устройстве является наличие блока 13 идентификации ситуации, блока 14 хранения ЦКМ, блока 15 встроенного контроля, блока 16 хранения алгоритмов адаптации к дестабилизирующим факторам, блока 17 хранения алгоритмов управления энергетическим потенциалом и характеристиками обнаружения, их связей с другими блоками и входами устройства, а также расширение функциональных возможностей блока 5 обработки сигналов, блока 6 выбора алгоритмов управления, и блока 7 управления.
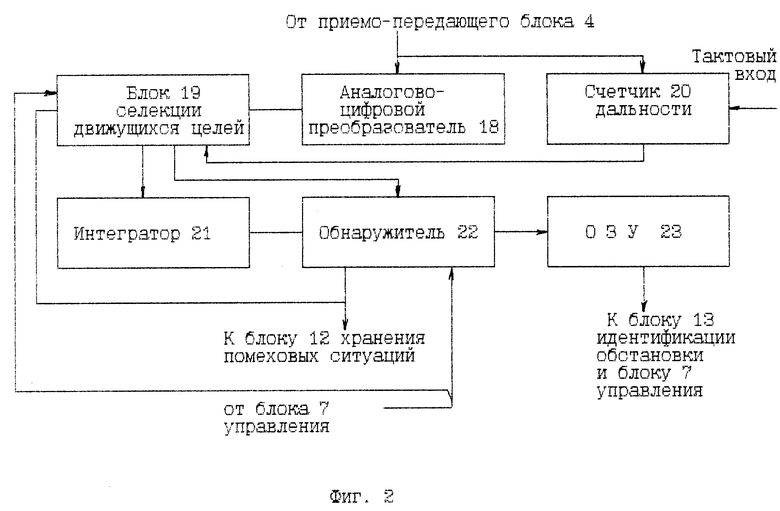
Блок 5 обработки сигналов представляет собой типовую систему первичной обработки информации, используемую в РЭС (см. D.A. Ethington. The AN/TPQ-36 and AN/TPQ-37 firefinder radar systems. / "EASON-77 Rec., Arlington, Va. 1977" N.Y. 1977).
На фиг. 2 представлен вариант построения блока 5 для многоканальной РЛС сопровождения объектов наблюдения (ОН). Блок 5 содержит: аналогово-цифровой преобразователь (АЦП) 18, блок 19 селекции движущихся целей (СДЦ), счетчик 20 дальности, интегратор 21, обнаружитель 22 и оперативное запоминающее устройство (ОЗУ) 23.
Тактовая частота АЦП 18, осуществляющего оцифровку сигналов, поступающих с выхода приемо-передающего блока 4, зависит от требуемой точности измерения параметров сигнала и в конечном счете определяется требуемой точностью определения координат ОН.
Счетчик 20 дальности может быть реализован по одной из цифровых схем, определяющих номер дискрета дальности в момент появления цели на ее входе (например, см. П. А. Бакулев, А.А. Сосновский. Радиолокационные и радионавигационные системы. - М. : Радио и связь. 1994, с. 170-173, рис. 5.21 - 5.25). Величина дискрета определяется требуемой точностью определения дальности и зависит от периода следования импульсов, поступающих на тактовый вход счетчика 20 дальности.
Сигналы от приемо-передающего блока 4 поступают на вход АЦП 18. Далее оцифрованный сигнал поступает на блок 19 селекции движущихся целей (СДЦ).
Селекция движущихся целей может быть реализована с использованием быстрого преобразования Фурье (БПФ) по одной из схем, приведенных в книге П.А. Бакулева и А.А. Сосновского "Радиолокационные и радионавигационные системы" (с. 124-127, рис. 4.22 - 4.24). Причем информация о сигналах, признанных блоком СДЦ помехами, вместе с кодами их координат, поступающих от счетчика 20 дальности и блока 7 управления, передается в блок 12 хранения помеховых ситуаций.
Для обнаружения целей используется метод, использующий стабилизацию уровня ложных тревог. Для этого сигналы с выхода блока 19 СДЦ поступают на интегратор 21, служащий устройством для определения среднего уровня сигналов. Этот средний уровень используется для определения порога обнаружения, устанавливаемого в обнаружителе в отсутствии сигналов от блока 7 управления, которые блокируют сигналы от интегратора 21 и устанавливают этот порог в соответствии с выбранным блоком 6 алгоритмом управления характеристиками обнаружения.
Оперативное запоминающее устройство 23 предназначено для хранения определенного числа отсчетов амплитуд сигналов в элементах разрешения по дальности и скорости для различных угловых положений луча антенны, т.е. для составления карты целевой обстановки. Коды угловых положений луча поступают на ОЗУ 23 от блока 7 управления через обнаружитель 22 в моменты принятия им решений об обнаружении полезных сигналов.
Блок 12 хранения помеховых ситуаций используется для запоминания пространственного расположения, диапазона изменения частоты Доплера, а также энергетических характеристик медленно движущихся источников пассивных помех (облака, самолеты, птицы и т.п.),
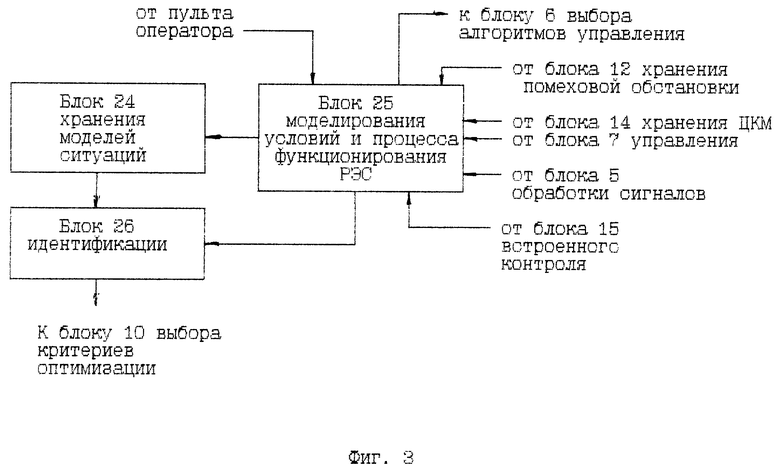
Блок 13 идентификации обстановки (фиг. 3) представляет собой вычислительное устройство, которое осуществляет математическое моделирование функционирования РЭС с учетом реальных условий и состоит из блока 24 хранения моделей ситуаций, блока 25 моделирования условий и процесса функционирования РЭС, а также блока 26 идентификации.
Обстановка, в которой функционирует РЭС, представляется ансамблем частных ситуаций:
целевая обстановка (количество объектов наблюдения в заданном секторе обзора, координаты и параметры траектории каждой из них, а также количество целей в объеме разрешения по каждому из информационных каналов интеллектуальной многоканальной РЭС) - информация поступает от блока 5 обработки сигналов на пятый вход блока 13 и от блока 7 управления на его четвертый вход;
помеховая обстановка (количество помех, их координаты, энергетические и частотные характеристики) - информация поступает от блока 12 хранения помеховых ситуаций на третий вход блока 13;
техническое состояние РЭС, а также климатические условия окружающей среды (температура, влажность, атмосферное давление, ветровые нагрузки) - информация поступает от блока 15 встроенного контроля на первый вход блока 13;
характер местности и связанные с ним источники погрешностей приема сигнала и определения экстраполированных координат объектов наблюдения - информация поступает от блока 14 хранения ЦКМ на второй вход блока 13.
Кроме того, от блока 7 управления на четвертый вход блока 13 поступает информация о используемых в рассматриваемый интервал времени алгоритмах управления характеристиками РЭС.
Эти частные ситуации, накладываясь друг на друга в рассматриваемом интервале времени, и образуют обстановку, которая подлежит идентификации в блоке 26 идентификации путем ее сравнения с типовыми моделями ситуаций, хранящимися в блоке 24 хранения моделей ситуаций.
Формализованная информация об обстановке, в которой функционирует РЭС, вместе с информацией от пульта оператора (о приоритетах ОН, параметрах сектора сканирования луча и т. п.), которая приходит на 6 вход блока 13, поступает с первого выхода блока 13 на второй вход блока выбора критериев оптимизации.
В процессе функционирования РЭС модель окружающей обстановки постоянно уточняется (обновляется).
Информация о эффективности функционирования РЭС в рассматриваемый интервал времени при выбранных критериях оптимизации и соответствующих им алгоритмах управления характеристиками РЭС поступает со второго выхода блока 13 на третий вход блока 6 выбора алгоритмов управления.
Блок 10 выбора критериев оптимизации представляет собой вычислительное устройство, в котором коды обстановки, поступающие с первого выхода блока 13 идентификации обстановки, преобразуются в адреса критериев оптимизации, хранящихся в блоке 9 хранения критериев оптимизации, а выбранный т.о. критерий транслируется в виде кода на первый вход блока 6 выбора алгоритмов управления.
Блок 6 выбора алгоритмов управления представляет собой вычислительное устройство (фиг. 4) и состоит из блока 27 принятия решения и блока 28 хранения решающих правил. В зависимости от выбранного критерия оптимизации, информация о котором поступает на первый вход блока 6, и соответствующих этому коду решающих правил, содержащихся в блоке 28, а также эффективности функционирования РЭС на рассматриваемом временном интервале, информация о которой поступает на третий вход блока 6 со второго выхода блока 13 идентификации обстановки, блок 6 осуществляет выбор из блоков 11, 16, 17 алгоритмов управления характеристиками РЭС.
Процесс принятия решения о выборе алгоритмов управления характеристиками РЭС, соответствующих обстановке, в которой она функционирует, основан на использовании экспертной системы.
Блок 6 транслирует коды выбранных таким образом алгоритмов управления характеристиками РЭС на третий вход блока 7 управления.
Блок 7 управления представляет собой вычислительное устройство, осуществляющее измерение параметров траектории объектов наблюдения и реализующее управление характеристиками РЭС в соответствии с выбранными блоком 6 алгоритмами. Кроме того, блок 7 управления осуществляет информационный обмен с пультом оператора и транслирует коды выбранных блоком 6 алгоритмов управления характеристиками РЭС, а также результаты траекторных измерений на четвертый вход блока 13 идентификации обстановки.
Блок 15 встроенного контроля преобразует информацию, поступающую от входящих в его состав датчиков технического состояния элементов РЭС, температуры окружающей среды, частоты излучения, состояния геометрии антенной системы и т.д., в коды и транслирует ее на первый вход блока 13 идентификации обстановки. Варианты технической реализации блока 15 встроенного контроля представлены в статье Шишова Ю.А., Голика А.М., и др. "Адаптация управления ФАР по результатам встроенного контроля". - Зарубежная радиоэлектроника, 1990, N 9.
Блок 11 хранения алгоритмов адаптации к помехам, блок 12 хранения помеховых ситуаций, блок 14 хранения ЦКМ, блок 16 хранения алгоритмов адаптации к дестабилизирующим факторам и целевой обстановке, блок 17 хранения алгоритмов управления энергетическим потенциалом и характеристиками обнаружения имеют однотипную конструкцию, представляют собой программируемые постоянные запоминающие устройства (ППЗУ) и могут иметь различные варианты технической реализации.
Блок 6 выбора алгоритмов управления, блок 7 управления, блок 10 выбора критериев оптимизации, блок 13 идентификации обстановки представляют собой вычислительные устройства, которые в зависимости от функционального назначения РЭС, а также требований, предъявляемых к оперативности вычислительного процесса, габаритам и весу аппаратуры могут быть выполнены в виде микропроцессорных комплектов (блоки 9, 11, 12, 14, 16, 17 будут в этом случае технически реализованы в виде требуемого количества элементов памяти), либо в виде совместимых компьютеров, объединенных между собой в вычислительную сеть (блоки 9, 11, 12, 14, 16, 17 - будут реализованы при этом в виде накопителей информации требуемого объема).
Рассмотрим принцип работы устройства для варианта когерентно-импульсной многоканальной интеллектуальной РЭС, осуществляющей траекторные измерения и использующей фазовое управление лучом. При этом процесс функционирования РЭС имеет следующие этапы: поиск, автозахват и автосопровождение ОН. Сущность и содержание этих этапов подробно приведены в книге Ю.А. Шишова и В.А. Ворошилова "Многоканальная радиолокация с временным разделением каналов". - М.: Радио и связь, 1987, - 144 с. Поэтому в дальнейшем описании устройства будут приведены особенности его функционирования.
Устройство работает следующим образом.
От пульта оператора на блоки 13 идентификации обстановки и 7 управления поступает информация о размерах сектора обзора пространства и направлении его директрисы, о районах особого внимания и приоритетности различных типов ОН и т.д.
При отсутствии помех сканирование главного лепестка ДН производится путем подачи на вход блока 8 управления АФР кодов требуемых угловых положений. В результате на входы каналов 2 управления поступают коды команд управления амплитудой и (или фазой) токов возбуждения соединенных с ними излучателей АР 1.
Расчет команды управления фазой для i, j канала 1 управления (i, j - координаты излучателя, определяемые относительно двух ортогональных осей X и Y в плоскости антенны) осуществляется в соответствии с выражением
где ϕначij - начальное фазовое распределение, которое может быть нелинейной или случайной функцией координат излучателей;
Δϕ - дискрет управления фазой;
Ent{a} - определение целой части числа a;
ϕTpij - требуемая фаза тока возбуждения i, j - излучателя АР для заданного положения луча, рассчитываемая блоком управления АФР в соответствии с выражением
ϕTpij = k(idxcosΘxo+jdycosΘyo)+ϕkij,
где cosΘxo и cos cosΘyo - направляющие косинусы главного максимума диаграммы направленности АР;
dx и dy - расстояния между излучателями АР по оси X и Y соответственно;
k = 2π/λ - волновое число;
ϕkij - компенсационная фазовая добавка, рассчитываемая блоком 8 управления АФР в соответствии с командами, поступающими на него от блока 7 управления.
Значения фаз, сформированные в блоке управления АФР в соответствии с (1), устанавливаются в каналах 2 управления с помощью фазовращателей.
При появлении помех определяются помеховые направления путем сканирования главного лепестка ДН (при работе РЭС на прием) или путем использования специальной антенны.
Полученная таким образом информация о координатах и характеристиках источников помех поступает на первый вход блока 12 хранения помеховых ситуаций, а на второй его вход поступает подобная информация от блока 5 обработки сигналов, появляющаяся в результате селекции движущихся целей блоком 19 СДЦ и выделения полезных сигналов обнаружителем 22.
Приемо-передающий блок 4 в соответствии с кодом команды управления, поступающей от блока 7 управления, формирует зондирующий сигнал заданной формы и структуры, который затем через сумматор 3 и каналы 2 управления поступает на антенную решетку 1 и излучается в пространство.
Принятый N-элементной АР 1 отраженный от ОН сигнал проходит через каналы 2 управления, сумматор 3 и поступает в приемо-передающий блок 4, где осуществляется его усиление и преобразование до вида, позволяющего осуществить дальнейшую обработку.
В моноимпульсных РЭС блок 3 реализует также функцию выделения суммарного Σ и двух разностных сигналов: по дирекционному углу Δα и углу места Δε (см. D. A. Ethington. The AN/TPQ-36 and AN/TPQ-37 firefinder radar systems. /"Eason-77" Rec. , Arlington, Va. 1977" N.Y. 1977). Эти сигналы будут поступать на приемо-передающий блок 4 по трем каналам: Σ, Δα и Δε .
С выхода приемника сигналы от ОН поступают на блок 5 обработки сигналов (фиг. 2), где осуществляется обнаружение сигналов движущихся целей в соответствии с порогом обнаружения, устанавливаемым автоматически (с помощью интегратора 21), либо устанавливаемым в соответствии с кодом команды, поступающей от блока 7 управления.
Информация о целевой (сигнальной) обстановке, накапливаемая в ОЗУ 23, поступает к блоку 13 идентификации обстановки, а также к блоку 7 управления, где осуществляется измерение угловых координат объектов наблюдения, а также определение их характеристик.
Расширение функциональных возможностей блока 5 обработки сигналов (по сравнению с аналогичным блоком в устройстве-прототипе) заключается в обеспечении возможности адаптивного управления порогом обнаружения сигналов с помощью команд, поступающих от блока 7 управления, соответствующих выбранному блоком 6 алгоритму управления характеристиками обнаружения, а также возможности адаптивного управления количеством когерентно накапливаемых импульсов (т.е. изменением количества импульсов в пачке), излучаемых РЭС в заданном угловом положении луча и обрабатываемых в обнаружителе 22, в соответствии с кодами команд управления, поступающих от блока 7 управления, реализующего выбранный блоком 6 алгоритм управления энергетическим потенциалом РЭС.
Блок 13 идентификации обстановки (фиг. 3) осуществляет:
отнесение обстановки, в которой функционирует РЭС, к определенному классу и выдачу кода этой обстановки в блок 10 выбора критериев оптимизации и блок 6 выбора алгоритмов управления (на основе информации об условиях функционирования РЭС, поступающей от блоков 5, 12, 14, 15, а также от пульта оператора);
расчет точностных характеристик, характеристик помехозащищенности, а также пропускной способности РЭС (т. е. расчет показателей эффективности функционирования РЭС) и выдачу кода этой информации на блок 6 выбора алгоритмов управления на основе информации о выбранных алгоритмах управления характеристиками РЭС, поступающей от блока 7 управления.
Отнесение обстановки, в которой функционирует РЭС, к определенному классу осуществляется путем построения ее модели в блоке 25 моделирования условий и процесса функционирования РЭС на основе исходных данных, поступающих от блоков 5, 12, 14, 15, а также от пульта управления, и последующего ее сравнения с моделями ситуаций, хранящимися в блоке 24 хранения моделей ситуаций. Результаты сравнения кодируются. Причем каждой составной части обстановки соответствуют определенные элементы кода, отправляемого блоком 13 к блоку 10.
Расчет характеристик функционирования РЭС осуществляется на основе вычисления ее интегральных характеристик излучения (т.е. построения диаграммы направленности АР) и пропускной способности РЭС по данным целевой и помеховой обстановки, а также данных о техническом состоянии РЭС, поступающих от блоков 5, 12, 14, 15.
В качестве критериев оптимизации используются правила, в соответствии с которыми определяются требования к показателям эффективности функционирования РЭС. Например, для рассматриваемого типа РЭС могут быть использованы критерии: максимума пропускной способности РЭС при заданной точности определения координат ОН, заданном уровне и скорости перемещения помех и заданном уровне ложной тревоги; максимума коэффициента направленного действия АР при заданном уровне боковых лепестков диаграммы направленности, а также заданном направлении ее нулей на помехи; минимума погрешности определения экстраполированных координат ОН при заданной пропускной способности РЭС, заданном уровне и скорости перемещения помех и уровне ложной тревоги и т.п. Требования к показателям эффективности функционирования РЭС могут распространяться на все ОН либо на их отдельные виды. Критерии хранятся в блоке 9 и выбираются блоком 10 в соответствии с кодом обстановки, поступающей от блока 13 идентификации обстановки.
Блок 6 выбора алгоритмов управления (фиг. 4) осуществляет на основе данных о критерии оптимизации, поступающих от блока 10 выбора критериев оптимизации, выбор алгоритма управления АФР на раскрыве АР 1, алгоритма распределения временного ресурса РЭС по этапам функционирования (поиск, автозахват и автосопровождение) для различных ОН, алгоритмов управления энергетическим потенциалом РЭС и характеристиками обнаружения, позволяющими осуществить максимизацию показателей эффективности функционирования РЭС в реальных условиях окружающей обстановки (которые рассчитываются в блоке 13) на основе адаптации к целевой и помеховой обстановке, а также к дестабилизирующим факторам окружающей среды и к характеру местности. Алгоритмы адаптации, хранящиеся в блоках 11, 16 и 17, по сути представляют собой различные алгоритмы управления АФР, характеристиками обнаружения и энергетическим потенциалом РЭС, а также алгоритмы распределения временного ресурса РЭС.
Расширение функциональных возможностей блока 6 выбора алгоритмов управления заключается в том, что выбор алгоритмов управления функционированием РЭС осуществляется с учетом целевой обстановки, характеристик местности и дестабилизирующих факторов, воздействующих на техническое состояние РЭС, а не только с учетом помеховой обстановки, как это делается в устройстве-прототипе.
Блок 7 управления реализует выбранные блоком 6 алгоритмы управления РЭС, преобразуя их коды в коды команд управления, поступающие к блокам 4, 5, 8. В приемо-передающем блоке 4 в соответствии с этим командами осуществляется управление характеристиками зондирующего сигнала, в блоке 5 обработки сигналов - управление порогом обнаружения и количеством когерентно накапливаемых импульсов, а в блоке 8 - управление амплитудно-фазовым распределением на раскрыве АР. Блок 7 управления осуществляет измерение параметров траекторий ОН и реализует заданные темпы обращения к различным типам ОН в соответствии с кодами алгоритмов, поступающими от блока 6. Кроме того, блок 7 транслирует на блок 13 коды выбранных блоком 6 алгоритмов управления (т.о. замыкается обратная связь, позволяющая блоку 13 оценить эффективности выбранных алгоритмов управления и информировать об этом блок 6), и информирует оператора о сигнально-помеховой обстановке, о техническом состоянии РЭС, а также о соответствии ее характеристик требованиям, диктуемым обстановкой.
Расширение функциональных возможностей блока 7 управления заключается в осуществлении адаптивного управления характеристиками обнаружения, энергетическим потенциалом и временным ресурсом РЭС, что является новым по сравнению с устройством-прототипом.
Блок 8 управления АФР как и в устройстве-прототипе реализует формирование кодов команд управления каналами управления АР (в рассматриваемом случае - фазовращатели) в соответствии с кодом направления главного максимума ДН и выбранным блоком 6 алгоритмом адаптации РЭС к дестабилитрующим факторам (т.е. является по сути дела вычислителем фаз).
Положительный эффект предложенного технического решения состоит в расширении его функциональных возможностей, которое заключается в компенсации снижения характеристик излучения РЭС при воздействии на нее дестабилизирующих факторов (колебания температуры окружающей среды; смена частот излучения; изменения геометрии АР, механические повреждения полотна АР; технологический разброс характеристик каналов управления АР; отказы элементов АР и др.), а также в повышении оперативности управления лучом путем использования информации о ее техническом состоянии, поступающей от блока 15 встроенного контроля, управления энергетическим потенциалом РЭС и характеристиками обнаружения, а также алгоритмов адаптации к дестабилизирующим факторам.
Оценка эффективности предлагаемого устройства проводилась методом статистического моделирования.
Моделирование проводилось для интеллектуальной многоканальной РЭС, использующей 15-элементную линейную эквидистантную АР с фазовым управлением, трехразрядные фазовращатели которой имеют производственный разброс ±22,5o (т. е. ±Δϕ/2). На РЭС воздействует активная помеха, сигнал от которой на выходе приемо-передающего блока 4 имеет уровень, равный уровню полезного сигнала, приходящего в направлении главного максимума ДН АР (т.е. отношение сигнал/шум составляет - υ = 0 дБ, см. фиг. 5). Направление прихода помехи считается известным (+9o относительно нормали к плоскости АР). Главный максимум ДН АР находится в направлении, совпадающем с нормалью к ее плоскости.
Моделировались также отказы каналов 2 управления АР, вызванные короткими замыканиями или обрывами переключающих элементов входящих в их состав фазовращателей. События обрыва и короткого замыкания принимались равновероятными.
В силу своих функциональных возможностей устройство-прототип осуществляет адаптацию РЭС лишь к активной помехе. Предлагаемое устройство наряду с этим будет осуществлять (в качестве примера) контроль технического состояния РЭС и адаптацию к нему.
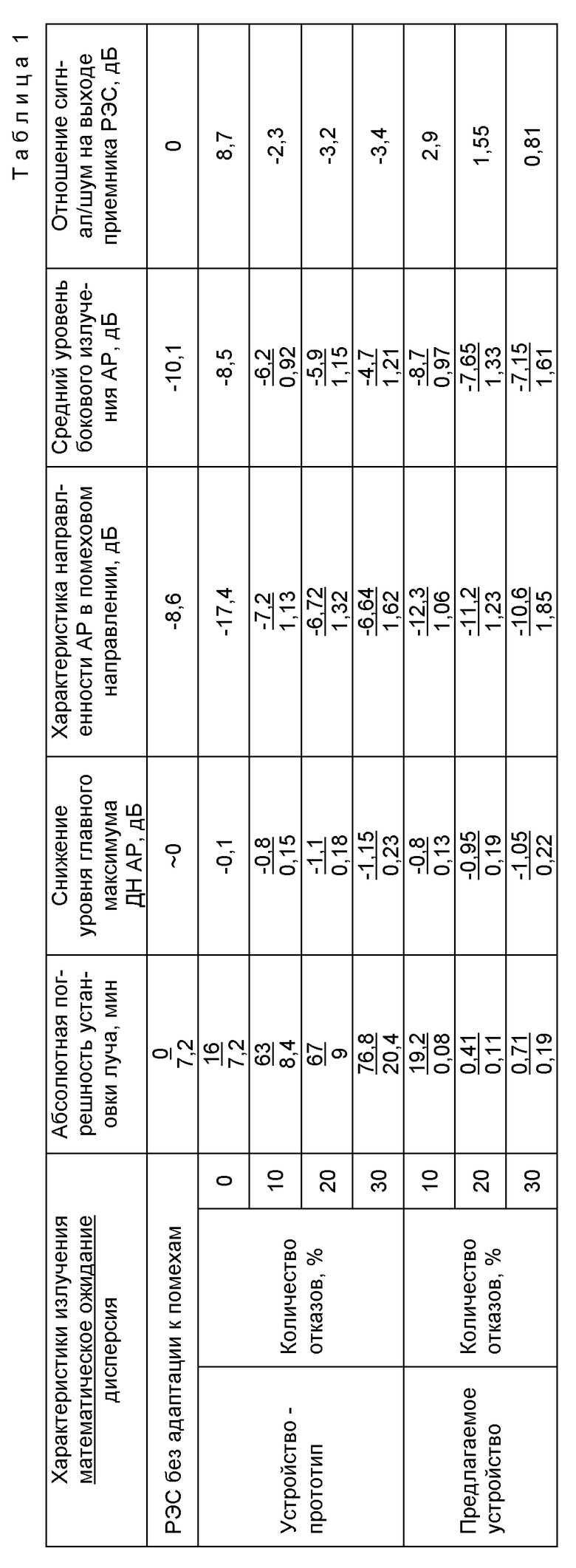
Обработка результатов моделирования осуществлялась графоаналитическим методом по результатам 200 опытов. Результаты моделирования приведены на фиг. 5 - 8 и сведены в таблицу 1.
В качестве показателя эффективности выбран выигрыш в отношении сигнал/шум на выходе приемника РЭС, определяемый выражением:
Wk = υпk-υпрk,
где k = 1, 2, 3 - коэффициент, определяющий количество вышедших из строя каналов управления (1 - 10%, 2 - 20%, 3 - 30%);
υп и υпр - отношение сигнал/шум на выходе приемника при использовании предлагаемого устройства и прототипа соответственно.
Адаптация устройства-прототипа к активной помехе осуществлялась с помощью известного метода малых возмущений (Baird C.A. Rassweiler G.G. - IEEE Trans., 1976, v. AP-24, N 5; Заявка 24777844 (Франция) МКИ H 01 Q 3/26, G 01 S 7/36), при котором адаптивное управление АФР осуществляется путем последовательного изменения фазы тока возбуждения излучателей АР на величину дискрета переключения фазовращателей Δϕ в каналах 2 управления АР. При этом оптимальные значения ϕkij подбираются методом случайного поиска в заданном положении главного лепестка диаграммы направленности АР. В процессе перебора значений ϕkij фиксируется уровень помехи на выходе приемника. Таким образом, поиск оптимального значения ϕkij продолжается до тех пор, пока не будет достигнут минимальный уровень помех на выходе приемника.
В результате указанных процедур устройство-прототип позволяет снизить уровень помехового сигнала на выходе приемника многоканальной РЭС на 8,8 дБ (см. фиг. 5 - 6). Снижение уровня главного максимума диаграммы направленности АР составит при этом 0,1 дБ, а абсолютная погрешность его установки в заданное угловое положение составит 0,28o (т.е. 16'). Пренебрегая малым уровнем снижения полезного сигнала, обусловленного смещением главного максимума ДН, получим следующее значение отношения сигнал/шум на выходе приемника
υ = 8,6 - (-17,4) + (0,1) = 8,7 дБ.
В случае введения неисправностей в каналы 2 управления АР отношение сигнал/шум на выходе приемника при использовании устройства-прототипа РЭС уменьшается и с учетом того, что снижение уровня полезного сигнала при смещении главного лепестка в соответствии с данными, приведенными в табл. 1 и на фиг. 7, составляет:
0,19 дБ при 10% отказавших каналов 2 управления (смещение 63');
0,2 дБ при 20% отказавших каналов 2 управления (смещение 67');
1,15 дБ при 30% отказавших каналов 2 управления (смещение 77');
получим следующие его значения:
υпр1 = -2,3 дБ при 10% отказавших каналов 2 управления;
υпр2 = -3,2 дБ при 20% отказавших каналов 2 управления;
υпр3 = -3,4 дБ при 30% отказавших каналов 2 управления.
Предлагаемое устройство на основе информации, поступающей от блока 15 встроенного контроля, использует для компенсации снижения отношения сигнал/шум динамическое управление фазовращателями (см. А.с. 1580393, МКИ G 06 F 15/20 - Шишов Ю.А., Голик А.М., Клейменов Ю.А., Мухаметшин А.Т. Вычислительное устройство для управления лучом плоской антенной решетки. 1990), в соответствии с которым код управления фазовращателем ij-го канала управления формируется в соответствии с алгоритмом:
где l - номер фазовой подставки, поступающей в младшие разряды фазовращателей с каждым зондированием (l = 0, 1, 2, ... 2P-1);
{.} = Sij - номер дискретного состояния ij-го фазовращателя (Sij = 0, 1, 2, ... 2P-1).
Таким образом, после установки фазовращателей в дискретные состояния в соответствии с заданным направлением излучения и начальной фазой тока возбуждения ij-го излучателя в соответствии с алгоритмом (1) (т.к. при l = 0 выражение (1) идентично выражению (2)), периодически переключают одновременно все фазовращатели в очередное дискретное состояние с таким расчетом, чтобы за время пребывания луча АР в заданном направлении каждый фазовращатель принял все свои дискретные состояния в течение одинаковых отрезков времени.
Погрешность установки фазового состояния ij-го фазовращателя АР, обусловленная отказами (обрывами или короткими замыканиями) его переключающих элементов, может быть представлена выражением
ϕ
где ϕсистij и ϕ
Погрешность ϕ
Поэтому она полностью компенсируется в процессе динамического управления АР.
При том же количестве отказавших каналов управления 2 в случае использования предлагаемого технического решения отношение сигнал/шум на выходе приемника РЭС увеличивается по сравнению с используемым в тех же условиях устройством-прототипом. С учетом того, что снижение уровня полезного сигнала при смещении главного лепестка в соответствии с данными, приведенными в табл. 1 и на фиг. 8, составляет:
≈ 0 дБ при 10% отказавших каналов 2 управления (смещение 19');
0,1 дБ при 20% отказавших каналов 2 управления (смещение 24');
0,14 дБ при 30% отказавших каналов 2 управления (смещение 42');
получим следующие значения отношения сигнал/шум на выходе приемника:
υп1 = 2,8 дБ при 10% отказавших каналов 2 управления;
υп2 = 1,55 дБ при 20% отказавших каналов 2 управления;
υп3/ = 0,81 дБ при 30% отказавших каналов 2 управления.
Выигрыш в отношении сигнал/шум на выходе приемника РЭС при этом составит:
W1 = 2,9 - (-2,3) = 5,2 [дБ];
W2 = 1,55 - (3,2) = 4,75 [дБ];
W3 = 0,81 - (-3,4) = 4,21 [дБ].
Использование предлагаемого устройства позволяет также снизить средний уровень боковых лепестков АР на:
2,5 дБ при 10% отказавших каналов 2 управления;
1,75 дБ при 20% отказавших каналов 2 управления;
2,45 дБ при 10% отказавших каналов 2 управления.
Систематические погрешности установки фазовых состояний фазовращателей ϕсистij , показанные в (3), приводят к систематической погрешности установки луча АР Δсист , которая при использовании динамического управления АР будет величиной постоянной для всех возможных угловых положений луча. Эта погрешность может быть определена в блоке 13 идентификации обстановки на основе данных о координатах отказавших каналов 2 управления АР, номерах разрядов вышедших из строя переключающих элементов АР, а также о типе отказа (обрыв или короткое замыкание), поступающих от блока 15 встроенного контроля. Вычисление Δсист может быть осуществлено на основе расчета ДН в соответствии с выражением для множителя решетки:
где i = 1, I;
j = 1, J;
Aij - амплитуда тока возбуждения ij-го излучателя АР.
Примером устройства встроенного контроля АР, позволяющего получить указанную информацию об отказавших каналах 2 управления является А.с. 1781641, МКИ G 01 R 29/10, 1992 г. (Голик А.М. и др. Устройство встроенного контроля дискретно-коммутационной антенной решетки с pin-диодными фазовращателями и со строчно-столбцевым фазированием).
На основе данных о систематической погрешности установки луча АР Δсист осуществляется юстировка луча АР путем механического перемещения ее полотна на величину, равную ( -Δсист ), либо путем учета погрешности Δсист при расчете команд управления лучом в блоке 7 управления.
Компенсация смещения главного максимума ДН, вызванного отказами каналов 2 управления АР, приведет к увеличению отношения сигнал/шум на выходе приемника РЭС и, следовательно, к увеличению выигрыша W до значения W':
W1' = 5,2 [дБ];
W2' = 5,77 [дБ];
W3' = 5,25 [дБ].
Кроме того, практически полная компенсация погрешностей установки луча, вызванных отказами каналов 2 управления, приведет к снижению вероятности срыва процесса сопровождения объектов наблюдения и как следствие повышению пропускной способности РЭС.
Постоянный контроль уровня полезного сигнала и сравнение этого уровня с порогом обнаружения в блоке 13 идентификации обстановки позволит значительно сократить время адаптации, т.к. поиск минимального из возможных уровней помехового сигнала даже для приведенного варианта АР требует значительных временных затрат (т.к. число возможных состояний АР при этом 21б), а приемлемый уровень отношения сигнал/шум (например, 1 дБ) наступает гораздо раньше (для рассматриваемого примера на 14 шаге поиска оптимального распределения).
На примере упрощенных условий функционирования (т.е. только при наличии отказов каналов 2 управления АР) показано значительное преимущество предлагаемого изобретения по сравнению с устройством-прототипом. Учет описанной ранее совокупности дестабилизирующих факторов, имеющих место в реальных условиях, сделает эти преимущества еще более заметными.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ ПРОВАЛОВ В ДИАГРАММЕ НАПРАВЛЕННОСТИ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ В НАПРАВЛЕНИЯХ НА ИСТОЧНИКИ ПОМЕХ | 1996 |
|
RU2110076C1 |
| СПОСОБ УПРАВЛЕНИЯ АМПЛИТУДНО-ФАЗОВЫМ РАСПРЕДЕЛЕНИЕМ НА РАСКРЫВЕ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ | 1996 |
|
RU2109376C1 |
| СПОСОБ УПРАВЛЕНИЯ АМПЛИТУДНО-ФАЗОВЫМ РАСПРЕДЕЛЕНИЕМ НА РАСКРЫВЕ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ | 2006 |
|
RU2333578C2 |
| УСТРОЙСТВО ПОДАВЛЕНИЯ УЗКОПОЛОСНЫХ ПОМЕХ | 1988 |
|
SU1840158A1 |
| СПОСОБ И УСТРОЙСТВО АДАПТИВНОЙ ПРОСТРАНСТВЕННОЙ ФИЛЬТРАЦИИ СИГНАЛОВ | 1998 |
|
RU2141706C1 |
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ ПРИЦЕЛЬНЫХ ПОМЕХ РАДИОЛОКАЦИОННЫМ СТАНЦИЯМ | 2006 |
|
RU2329603C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ | 1995 |
|
RU2097778C1 |
| СПОСОБ ВСТРОЕННОГО КОНТРОЛЯ ХАРАКТЕРИСТИК АКТИВНОЙ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ | 2012 |
|
RU2511032C2 |
| СПОСОБ ПОИСКА ИСТОЧНИКОВ ИЗЛУЧЕНИЙ СЛОЖНЫХ СИГНАЛОВ | 2016 |
|
RU2605691C1 |
| СПОСОБ АДАПТИВНОГО ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ | 2006 |
|
RU2331902C2 |
Изобретение относится к радиотехнике и может быть использовано для определения координат объектов. Достигаемый технический результат - расширение функциональных возможностей системы путем компенсации снижения характеристик излучения при воздействии дестабилизирующих факторов, а также повышение оперативности управления лучом антенной решетки (АР) при адаптации к сигнально-помеховой обстановке. Устройство содержит N-элементную АР, N каналов управления, суммирующий блок, блок обработки сигналов, блок выбора алгоритмов управления, блок управления, блок управления амплитудно-фазовым распределением, блок хранения критериев оптимизации, блок выбора критериев оптимизации, блок хранения алгоритмов адаптации к помехам, блок хранения помеховых ситуаций, блок идентификации обстановки, блок хранения цифровой карты местности, блок встроенного контроля, блок хранения алгоритмов адаптации к дестабилизирующим факторам, блок хранения алгоритмов управления энергетическим потенциалом и характеристиками обнаружения. 8 ил., 1 табл.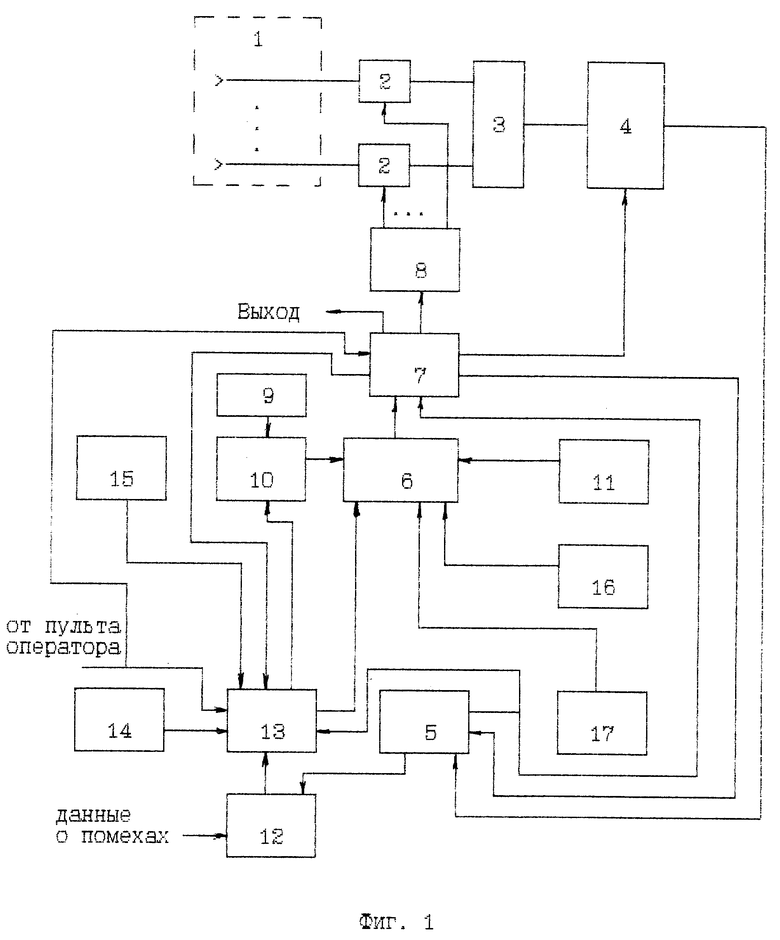
Интеллектуальная многоканальная радиоэлектронная система (РЭС), состоящая из N-элементной антенной решетки (АР), каждый элемент которой соединен с соответствующим n-м каналом управления АР (n = 1, N), управляющие входы которых подключены к соответствующим выходам блока управления амплитудно-фазовым распределением (АФР), а выходы соединены с соответствующими входами суммирующего блока, выход которого подключен к приемопередающему блоку, выход которого соединен с первым входом блока обработки сигналов, выход которого подключен к первому входу блока управления, на второй вход которого поступают данные, вводимые с пульта оператора, первый выход соединен со входом блока управления амплитудно-фазовым распределением (АФР), а второй выход является информационным выходом интеллектуальной многоканальной РЭС, блока выбора критериев оптимизации, первый вход которого соединен с выходом блока хранения критериев оптимизации, первый выход подключен ко входу блока хранения критериев оптимизации, а второй выход подключен к первому входу блока выбора алгоритмов управления, второй вход которого соединен с блоком хранения алгоритмов адаптации к помехам, а также блока хранения помеховых ситуаций, отличающаяся тем, что введен блок встроенного контроля, на вход которого поступает информация о техническом состоянии интеллектуальной многоканальной РЭС, а выход подключен к первому входу блока идентификации обстановки, второй вход которого соединен с выходом блока хранения цифровой карты местности, третий вход подключен к блоку хранения помеховых ситуаций, на первый вход которого поступают данные о помехах, а второй вход подключен ко второму выходу блока обработки сигналов, второй вход которого соединен с третьим выходом блока управления, четвертый выход которого подключен к управляющему входу приемопередающего блока, а пятый выход соединен с четвертым входом блока идентификации обстановки, пятый вход которого подключен к первому выходу блока обработки сигналов, шестой вход соединен со вторым входом блока управления, первый выход подключен ко второму входу блока выбора критериев оптимизации, а второй выход соединен с третьим входом блока выбора алгоритмов управления, четвертый вход которого подключен к выходу блока хранения алгоритмов адаптации к дестабилизирующим факторам, пятый вход соединен с выходом блока хранения алгоритмов управления энергетическим потенциалом и характеристиками обнаружения, а выход подключен к третьему входу блока управления.
| SANDLER S.S | |||
| и др | |||
| Intelligent antennas.// U.R.S.I.: Symp | |||
| Int | |||
| Electromagn | |||
| Theory | |||
| Budapesht, 1986, pt.A, p.159-161 | |||
| Проблемы антенной техники/ Под ред.БАХРАКА Л.Д | |||
| и др | |||
| - М.: Радио и связь, 1989, с.88-95 | |||
| US 4926186 A, 15.05.1990 | |||
| US 4599622 A, 08.07.1986 | |||
| US 4063250 A, 13.12.1977 | |||
| US 4268829 A, 19.05.1981. |
