Изобретение относится к области радиотехники, конкретно к радиолокационным измерениям, и может использоваться в радиолокации для определения угловых координат объектов наблюдения в условиях воздействия на антенну в виде фазированной антенной решетки (ФАР) дестабилизирующих факторов, влияющих на форму и положение главного максимума ее диаграммы направленности.
Известен способ измерения угловых координат, при котором для компенсации погрешностей измерений, обусловленных дискретным характером управления лучом, фазовращатели ФАР посредством операций "включено-выключено" с дискретом управления фазой Δϕ устанавливают в фиксированные состояния, ближайшие к заданному состоянию в соответствии с требуемым положением главного максимума диаграммы направленности ФАР (А.с. СССР 138974).
Недостаток способа состоит в том, что при его реализации на раскрыве ФАР формируется периодическое распределение коррелированных между излучателями ошибок квантования фазы, что влечет за собой рост дополнительных боковых лепестков диаграммы направленности и снижение коэффициента усиления ФАР, что не позволяет заметно снизить погрешность измерений.
Известен способ адаптивного измерения угловых координат, заключающийся в том, что погрешности установки луча ФАР в требуемые угловые положения, используемые с обратным знаком для коррекции положения нуля хранящейся в запоминающем устройстве пеленгационной характеристики измерителя, рассчитываются вычислительным устройством на основе поступающей от младших разрядов устройств управления фазовращателями информации о погрешностях установки фазовращателей в состояния, соответствующие требуемым угловым положениям луча (Пат. США 3.482.244, МКИ Н04В 7/02).
Недостатком способа является то, что он обеспечивает компенсацию погрешностей измерений, обусловленных лишь дискретным характером управления лучом ФАР. Однако в условиях воздействия совокупности дестабилизирующих факторов точность измерения угловых координат при реализации данного способа значительно снижается, что значительно сужает его область применения.
Наиболее близким по сущности является способ адаптивного измерения угловых координат, заключающийся в том, что определяемая при юстировке антенны скорректированная пеленгационная характеристика измерителя в виде таблицы хранится в запоминающем устройстве, кроме того, с учетом данных системы встроенного контроля о техническом состоянии элементов ФАР рассчитывается пеленгационная характеристика для каждого углового положения луча антенны, заносится в запоминающее устройство в виде таблицы, обновляемой при изменении технического состояния элементов ФАР, и используется при очередном зондировании данного углового направления, если техническое состояние элементов ФАР не изменилось. Кроме того, для каждого углового положения луча антенны по пеленгационной характеристике измерителя определяется диапазон однозначного отсчета угловых координат, который хранится в запоминающем устройстве и учитывается при определении направления очередного зондирования (Пат. Россия 2172964, МКИ 7 G01S 13/66, 7/36, 7/40).
Недостатком данного способа является то, что он не учитывает изменение пеленгационной характеристики в условиях воздействия совокупности дестабилизирующих факторов, к которым можно отнести температурный и технологический разброс характеристик фазовращателей, дискретный характер управления лучом, изменения частоты излучения, а также изменения геометрии ФАР. Это приводит к значительному снижению точности определения угловых координат.
Целью предлагаемого изобретения является повышение точности измерения угловых координат в условиях воздействия совокупности дестабилизирующих факторов.
Поставленная цель достигается тем, что с учетом данных от системы встроенного контроля о техническом состоянии элементов ФАР рассчитанная вычислительным устройством пеленгационная характеристика измерителя угловых координат для каждого углового положения луча ФАР хранится в запоминающем устройстве в виде таблицы, обновляется при изменении технического состояния элементов ФАР и используется при очередном зондировании данного углового положения, если техническое состояние элементов ФАР не изменилось, кроме того от системы встроенного контроля на вычислительное устройство поступают данные об изменении геометрии ФАР, о рабочей температуре и частоте излучения, а также данные о дискретности управления фазой, о производственном разбросе, температурной и частотной зависимости характеристик фазовращателей, которые хранятся в блоке памяти, обновление пеленгационной характеристики измерителя угловых координат, хранящейся в запоминающем устройстве в виде таблицы, осуществляется при изменении геометрии ФАР, рабочей температуры и частоты излучения более установленных значений.
По данным о температуре, частоте излучения и изменении геометрии, во входящем в состав системы встроенного контроля преобразователе, на основе хранящихся в блоке памяти допустимых значениях изменений температуры, частоты и геометрии, температурных и частотных зависимостях характеристик фазовращателей, а также представленных в значениях фазового сдвига смещениях элементов ФАР, оцениваются реальные значения амплитуды A(m, n) и фазы ϕ(m, n) токов возбуждения для каждого из m×n излучателей ФАР (где m и n-номер строки и столбца элемента ФАР соответственно) и определяется необходимость коррекции пеленгационной характеристики, при проведении которой значения A(m, n) и ϕ(m, n) поступают в вычислительное устройство для проведения расчетов.
Таким образом, предлагаемый способ характеризуется следующими отличительными признаками по сравнению с прототипом: расчет пеленгационной характеристики осуществляется с учетом данных об изменении геометрии, рабочей температуры и частоты излучения, а также данных о дискрете переключения состояний фазовращателей, допустимых значениях изменений температуры, частоты и геометрии, технологическом разбросе, температурной и частотной зависимости характеристик каждого из фазовращателей ФАР, хранящихся в блоке памяти.
Допустимыми значениями изменений температуры, частоты и геометрии являются те, в результате которых фазовое распределение токов возбуждения излучающих элементов ФАР не отличается от требуемого на величину ±Δϕ/2 (Δϕ - дискрет переключения состояний фазовращателя ФАР).
Выполнение указанных операций позволяет повысить точность измерения угловых координат в условиях воздействия совокупности дестабилизирующих факторов и расширить тем самым область применения способа-прототипа.
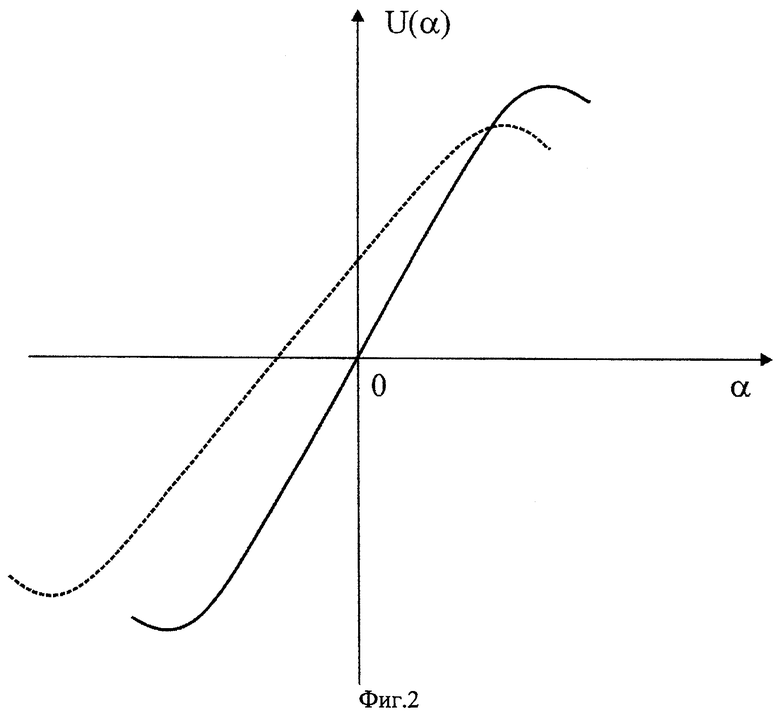
На фиг.1 представлена схема устройства, реализующего предлагаемый способ; на фиг.2 - пеленгационная характеристика измерителя угловых координат.
В результате выхода из строя элементов ФАР нарушается амплитудно-фазовое распределение токов возбуждения ее излучающих элементов, появляются искажения диаграммы направленности ФАР и пеленгационной характеристики измерителя, влекущие за собой погрешности измерения угловых координат объекта наблюдения.
Погрешности установки луча ФАР, обусловленные изменениями ее геометрии, являются систематическими и зависят от величины и направления взаимного смещения полотна и облучателя.
Технологический разброс характеристик фазовращателей ФАР, как правило, не выходит за пределы ±Δϕ/2. Расширение диапазонов рабочих температур и частот приводит к увеличению разброса характеристик фазовращателей, а следовательно, и к повышению погрешностей установки луча ФАР.
Измерение угловых координат объекта наблюдения по предлагаемому способу осуществляется следующим образом.
На основе данных от системы встроенного контроля о техническом состоянии элементов ФАР, об изменении геометрии, рабочей температуре и частоте, а также данных о дискретности управления фазой, о производственном разбросе, допустимых значениях изменений температуры, частоты и геометрии, температурной и частотной зависимости характеристик фазовращателей, хранящихся в блоке памяти, для заданного направлении Θ рассчитываются две перекрещивающиеся в направлении Θ диаграммы направленности антенны F1(Θ+γ/2) и F2(Θ-γ/2), разнесенные на угол ±γ/2 от равносигнального направления. По суммарной и разностной диаграммам направленности (Fс и Fp) строится пеленгационная характеристика U(Θ):

где Fc(Θ)=F1(Θ+γ/2)+F2(Θ-γ/2);
Fp(Θ)=F1(Θ+γ/2)-F2(Θ-γ/2).
По пеленгационной характеристике определяется отклонение объекта наблюдения от равносигнального направления α. С выхода вычислительного устройства снимается угловая координата объекта наблюдения Θон, определяемая как

Построение пеленгационной характеристики осуществляется в следующей последовательности.
Рассчитывается диаграмма направленности антенны на основе известного выражения:

где M, N - количество строк и столбцов ФАР соответственно;
m, n - номер строки и столбца антенной решетки соответственно (m=1, M; n=1, N);
A(m, n) - амплитуда тока возбуждения mn-го излучателя антенной решетки;
ϕ(m, n) - фаза тока возбуждения mn-го излучателя антенной решетки (для выбранного направления излучения);
Θ - угловые координаты требуемого углового положения луча (определяемые относительно нормали к плоскости антенной решетки, установленной из ее геометрического центра);
Q - угловые координаты точки диаграммы направленности, в которой рассчитывается нормированное значение уровня сигнала, излучаемого антенной решеткой.
Определение направления главного максимума диаграммы направленности осуществляется с помощью метода золотого сечения (Боглаев Ю.П. Вычислительная математика и программирование. - М.: Высш. шк., 1990. - с.372-373).
Подставляемое в выражение (3) при расчетах F(Θ, Q) значение амплитуды тока возбуждения mn-го излучателя A(m, n) определяется законом распределения амплитуд, принятым в используемой ФАР. Для определения этого параметра может быть использован один из известных способов дифференциального СВЧ-контроля характеристик ФАР (пат. 332323 (ФРГ), МКИ H01Q 3/38), описанных в статье Ю.А.Шишова, А.М.Голика и др. "Адаптация управления ФАР по результатам встроенного контроля" (Заруб. радиоэлектроника, 1990, № 9, с.69-75).
Значение фазы тока возбуждения mn-го излучателя ФАР ϕ(m, n), подставляемое в выражение (3), представляет собой следующую сумму:

где ϕупр(m, n) - фазовое состояние исправного фазовращателя ФАР,
в которое он устанавливается в соответствии с заданным направлением излучения Θ;

где ϕнач(m, n) - начальное фазовое распределение, которое может быть нелинейной или случайной функцией координат излучателей;
Δϕ - дискрет управления фазой;
Ent{а} - определение целой части числа а;
ϕmp(m, n) - требуемая фаза тока возбуждения m, n - излучателя ФАР для заданного положения луча, определяемая в соответствии с выражением:

где dx и dу - расстояния между излучателями ФАР по оси Х и Y соответственно;
k=2π/λ - волновое число;
λ - рабочая длина волны радиолокационной станции;
{.}=S(m, n) - номер дискретного состояния mn-го фазовращателя (Sij=0, 1, 2, ......2P-1).
ϕ(S) p(m, n) и ϕ(S) погр(m, n) - производственный температурный и частотный разброс характеристик mn-го фазовращателя и погрешность установки его состояния, обусловленная отказами переключающих элементов, определяемые путем контроля характеристик ФАР;
ϕG(n, m) - погрешность, обусловленная изменением геометрии ФАР.
По полученным значениям F1(Θ) и F2(Θ) строится пеленгационная характеристика (1), которая представляет собой таблицу зависимости выходного параметра измерителя угловых координат от углового отклонения объекта наблюдения α относительно равносигнального направления Θ0:

где Uр(Θ0+α) и Uс(Θ0+α) - сигналы на выходах разностного и суммарного канала соответственно.
Устройство, реализующее предлагаемый способ, содержит в своем составе систему встроенного контроля 1 (фиг.1), состоящую из блока контроля технического состояния 2, на вход которого подаются сигналы от каналов управления (КУ) ФАР, блока контроля геометрии 3, блока памяти 4, преобразователя 5, датчиков температуры 6 и частоты излучения 7. Выход углового дискриминатора 8 связан с входом вычислительного устройства 9, на другие входы которого поступает информация от запоминающего устройства 10 (пеленгационная характеристика измерителя, устанавливающая однозначное соответствие между напряжением на выходе углового дискриминатора и угловым смещением объекта наблюдения относительно равносигнального направления), системы встроенного контроля 1 (реальные значения амплитуды и фазы токов возбуждения каждого излучателя ФАР) и блока управления РЛС (требуемое угловое положение луча ФАР).
С выхода вычислительного устройства 9 снимается информация об угловом положении объекта наблюдения.
В штатном режиме работы радиолокационной станции, на систему встроенного контроля 1 поступают сигналы от каналов управления (КУ) ФАР, датчиков температуры 6 и частоты излучения 7. В блоке контроля технического состояния 2 производится идентификация технического состояния отдельных элементов ФАР. Блок может быть реализован на основе одного из известных устройств (пат.4926186 (США), МКИ G01R 29/08; а.с. 1781641А1 (СССР), МКИ G01R 29/10), позволяющих за требуемое время оценить техническое состояние элементов ФАР. Блок контроля геометрии 3 в зависимости от величины взаимного смещения элементов ФАР и облучателя, формирует значение фазового сдвига для каждого элемента ФАР. Блок может быть реализован на основе одного из известных устройств (пат. 4578680 (США), МКИ H01Q 3/36).
Информация о техническом состоянии элементов ФАР, об изменении их геометрии, температуре и частоте излучения, а также о дискретности управления фазой, о производственном разбросе, допустимых значениях изменений температуры, частоты и геометрии, температурной и частотной зависимости характеристик фазовращателей, хранящихся в блоке памяти 4, поступает на преобразователь 5, в котором сравниваются полученные в результате алгебраического суммирования значения ϕ(n, m) и A(m, n) с их допустимыми значениями.
Преобразователь 5 представляет собой арифметико-логическое устройство, которое преобразует поступающие на его входы данные в цифровой код. В том случае, если изменения геометрии, рабочей температуры или частоты излучения превысили допустимые значения, преобразователь 5 рассчитывает реальные значения амплитуды и фазы токов возбуждения каждого излучателя ФАР с последующей передачей в вычислительное устройство 9.
Информация о состоянии элементов ФАР от системы встроенного контроля 1 поступает в вычислительное устройство 9, которое на основании полученных данных о требуемом угловом положении луча ФАР Θ и данных от углового дискриминатора производит расчет пеленгационной характеристики измерителя угловых координат.
Применение предложенного способа позволит значительно повысить точность измерения угловых координат в условиях воздействия совокупности дестабилизирующих факторов.
Для оценки эффективности предлагаемого способа проводилось статистическое моделирование 50-элементной линейной эквидистантной ФАР, трехразрядные фазовращатели которой имеют производственный разброс ±22,5° (т.е. ±Δϕ/2). Разброс характеристик фазовращателей вследствие расширения диапазонов рабочих температур и частот принимался равным ±Δϕ, изменения амплитуд токов возбуждения не превышал 1%. Учет влияния погрешностей реализации АФР на точность определения угловых координат производился в соответствии с выражением:
где σ2 αуст - дисперсия, характеризующая случайную составляющую погрешности установки луча ФАР;
σ2 αпр - дисперсия, характеризующая погрешности измерения угловых координат, обусловленные шумами приемника.
Для моноимпульсного метода измерения угловых координат:
где Θ0.5 - ширина диаграммы направленности ФАР;
Рс/Рш - отношение сигнал/шум на входе измерителя;
γ - коэффициент, учитывающий потери за счет технического состояния ФАР.
Результаты моделирования показали, что предлагаемый способ позволяет практически полностью компенсировать ошибки определения угловых координат, вызванных воздействием на ФАР совокупности дестабилизирующих факторов. Имеющие место ошибки определения угловых координат обусловлены шумами приемника. При воздействии совокупности дестабилизирующих факторов предлагаемый способ определения угловых координат позволяет повысить точность на 20% по сравнению с прототипом.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АДАПТИВНОГО ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ | 2015 |
|
RU2606707C1 |
| СПОСОБ АДАПТИВНОГО ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ | 1999 |
|
RU2172964C1 |
| СПОСОБ УПРАВЛЕНИЯ АМПЛИТУДНО-ФАЗОВЫМ РАСПРЕДЕЛЕНИЕМ НА РАСКРЫВЕ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ | 1996 |
|
RU2109376C1 |
| СПОСОБ ВСТРОЕННОГО КОНТРОЛЯ ХАРАКТЕРИСТИК ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ | 2006 |
|
RU2333502C2 |
| СПОСОБ УПРАВЛЕНИЯ АМПЛИТУДНО-ФАЗОВЫМ РАСПРЕДЕЛЕНИЕМ НА РАСКРЫВЕ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ | 2006 |
|
RU2333578C2 |
| Способ управления амплитудно-фазовым распределением на раскрыве фазированной антенной решетки | 2016 |
|
RU2644999C2 |
| ИНТЕЛЛЕКТУАЛЬНАЯ МНОГОКАНАЛЬНАЯ РАДИОЭЛЕКТРОННАЯ СИСТЕМА | 1996 |
|
RU2160452C2 |
| СПОСОБ ВСТРОЕННОГО КОНТРОЛЯ ХАРАКТЕРИСТИК ЦИФРОВОЙ АКТИВНОЙ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ | 2020 |
|
RU2752553C1 |
| СПОСОБ ВСТРОЕННОГО КОНТРОЛЯ ХАРАКТЕРИСТИК АКТИВНОЙ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ | 2012 |
|
RU2511032C2 |
| УСТРОЙСТВО КОНТРОЛЯ ПАРАМЕТРОВ СХЕМЫ РАЗВЕДЕНИЯ ПЕЛЕНГАЦИОННЫХ ЛУЧЕЙ | 1989 |
|
SU1841118A1 |
Изобретение относится к области радиотехники. Техническим результатом является повышение точности измерения угловых координат в условиях воздействия совокупности дестабилизирующих факторов. Способ адаптивного измерения угловых координат объекта наблюдения основан на зондировании данного углового направления, при котором угловые координаты объекта наблюдения определяют по пеленгационной характеристике (ПХ) измерителя угловых координат (ИУК), рассчитанной для каждого углового положения луча ФАР с учетом данных от системы встроенного контроля (СВК), хранящейся в ЗУ в виде таблицы, обновляемой при изменении технического состояния элементов ФАР и используемой при очередном зондировании данного углового направления, если техническое состояние элементов ФАР не изменилось, при этом от СВК на вычислительное устройство поступают также данные об изменении геометрии, о рабочей температуре и частоте излучения, а также данные о дискретности управления фазой, о производственном разбросе, температурной и частотной зависимости характеристик фазовращателей, которые хранятся в блоке памяти, обновление ПХ ИУК, хранящейся в ЗУ в виде таблицы, осуществляется также при изменении геометрии ФАР, рабочей температуры и частоты излучения более установленных значений. 2 ил.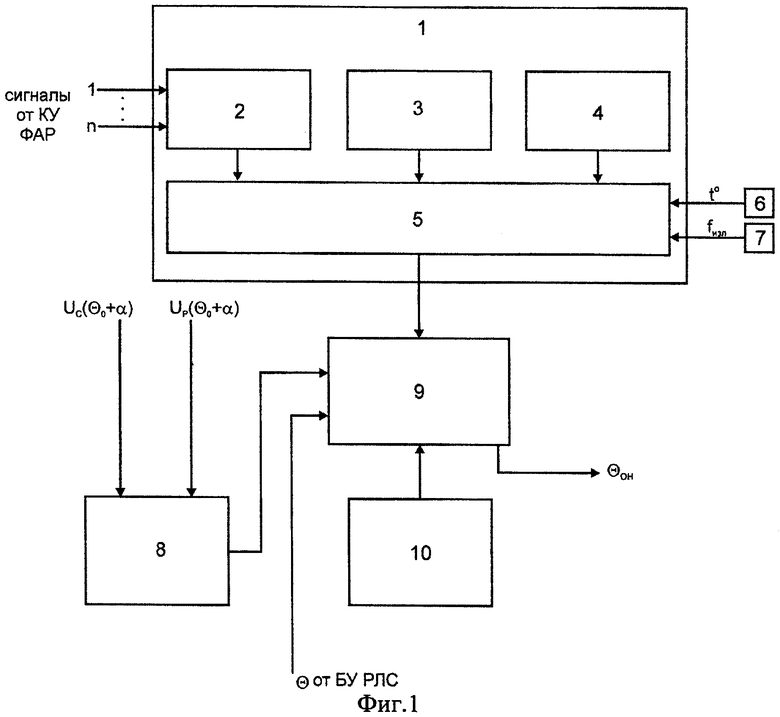
Способ адаптивного измерения угловых координат объекта наблюдения при зондировании данного углового направления, при котором угловые координаты объекта наблюдения определяют по пеленгационной характеристике измерителя угловых координат, рассчитанной вычислительным устройством для каждого углового положения луча фазированной антенной решетки (ФАР) с учетом данных о техническом состоянии элементов ФАР от системы встроенного контроля, хранящейся в запоминающем устройстве в виде таблицы, обновляемой при изменении технического состояния элементов ФАР и используемой при очередном зондировании данного углового направления, если техническое состояние элементов ФАР не изменилось, отличающийся тем, что от системы встроенного контроля на вычислительное устройство поступают также данные об изменении геометрии ФАР, о рабочей температуре и частоте излучения, а также данные о дискретности управления фазой, о производственном разбросе, о допустимых значениях изменений геометрии ФАР, рабочей температуре, частоте излучения, температурной и частотной зависимости характеристик фазовращателей, которые хранятся в блоке памяти системы встроенного контроля, обновление пеленгационной характеристики измерителя угловых координат, хранящейся в запоминающем устройстве в виде таблицы, осуществляется также при превышении изменений геометрии ФАР, рабочей температуры и частоты излучения допустимых значений изменений геометрии ФАР, рабочей температуры и частоты излучения, для чего все данные системы встроенного контроля во входящем в состав системы встроенного контроля преобразователе преобразуются в цифровой код и рассчитываются реальные значения амплитуды А(m, n) и фазы ϕ(m, n) токов возбуждения для каждого из m×n излучателей ФАР, где m и n номер строки и столбца элемента ФАР соответственно, которые поступают в вычислительное устройство для расчета пеленгационной характеристики измерителя угловых координат, по которой определяют угловые координаты объекта наблюдения.
| СПОСОБ АДАПТИВНОГО ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ | 1999 |
|
RU2172964C1 |
| СПОСОБ МОНОИМПУЛЬСНОГО ОПРЕДЕЛЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА | 1992 |
|
RU2033627C1 |
| ВЫЧИСЛИТЕЛЬ ОЦЕНКИ НЕЛИНЕЙНЫХ ИСКАЖЕНИЙ (ВАРИАНТЫ) | 2003 |
|
RU2255342C2 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ | 1990 |
|
RU2012901C1 |
| US 4707698 A, 17.11.1987 | |||
| US 5499031 A, 12.03.1996. | |||

