Изобретение относится к рулевому управлению транспортных средств, в частности к рулевому управлению легковых автомобилей с механическим передаточным механизмом, преимущественно для автомобилей, снабженных антиблокировочной системой.
Известен исполнительный механизм рулевого управления транспортного средства (а.с. СССР 1093594, кл. B 62 D 5/10, 1984), содержащий гидроцилиндр двухстороннего действия, шток которого подвижен в осевом направлении относительно поршня и кинематически связан с управляемыми колесами. Он снабжен фиксаторами в виде шариков, установленными радиально подвижно в отверстиях поршня. На наружной поверхности штока выполнена одна, а на внутренней поверхности корпуса гидроцилиндра - две кольцевые проточки для поочередного взаимодействия с фиксаторами, при этом величина полного хода поршня равна расстоянию между кольцевыми проточками в корпусе гидроцилиндра. Это обеспечивает некоторое улучшение управляемости транспортного средства и снижение утомляемости водителя за счет уменьшения максимального угла поворота рулевого колеса, необходимого для полного поворота управляемых колес и путем снижения автоколебаний управляемых колес.
Недостатком данного исполнительного механизма является наличие гидравлического привода исполнительного механизма, что усложняет систему рулевого управления по сравнению с системами с механическим передаточным механизмом, имеющим сравнительно малый вес и меньшую себестоимость. Кроме того, недостатком данного исполнительного механизма является отсутствие системы автоматического блокирования управляемых колес, что при превышении усилий, например от неровностей дороги, нарушающих намеченный курс движения транспортного средства, действующих поперек направления движения транспортного средства, величины силы трения между внутренней поверхностью корпуса гидроцилиндра и наружной поверхностью поршня, является предпосылкой возникновения автоколебаний управляемых колес, которые ухудшают эргономические характеристики и управляемость транспортного средства.
Наиболее близким из известных технических решений является рулевой механизм транспортного средства (а.с. СССР 931560, кл. B 62 D 3/02, 1982), содержащий корпус с крышками, гайку-рейку, связанную винтовым шариковым соединением с рулевым валом, установленным в подшипниках корпуса, и зубчатый сектор, расположенный в эксцентричных втулках. На торцах втулок выполнен ряд отверстий, расположенных концентрично внутренней поверхности подшипника, в неподвижно закрепленных на корпусе крышках установлены штифты для взаимодействия с упомянутыми отверстиями, а между торцовыми поверхностями сектора и втулок установлены упорные кольца.
Недостатком данного устройства является наличие рулевого механизма типа винт-гайка с несамотормозящимся винтовым шариковым соединением винта и гайки-рейки, что не обеспечивает блокирования управляемых колес, а наличие зазора в зубчатом зацеплении требует его систематического ручного регулирования путем поворота втулок с эксцентричными подшипниками в корпусе рулевого механизма, что снижает точность углового ориентирования эксцентричных подшипников скольжения, тем самым снижается надежность конструкции.
Данное устройство имеет сравнительно низкий технический уровень, что обусловлено конструкцией рулевого механизма типа винт-гайка, не обеспечивающей блокирование управляемых колес от автоколебаний и требующей систематического ручного регулирования зацепления и затрат времени для достижения правильного попарного углового ориентирования левого и правого эксцентричных подшипников скольжения относительно друг друга и относительно соответствующих втулок и корпуса.
В этой связи важнейшей задачей является создание новой конструкции исполнительного механизма рулевого управления транспортного средства, снабженного новой исполнительной системой в виде механизма автоматического блокирования управляемых колес, имеющего самотормозящееся винтовое шариковое соединение гайки, кинематически связанной с рулевым механизмом, и поперечной винтовой тяги, кинематически связанной с управляемыми колесами, что позволяет создать автоматическое блокирование управляемых колес от воздействия усилий, например со стороны неровностей дороги, нарушающих намеченный курс движения транспортного средства, действующих поперек направления движения транспортного средства, как при отсутствии управляющего воздействия со стороны рулевого колеса, так и при его наличии, тем самым обеспечивается полная защита водителя от автоколебаний управляемых колес и снижение самих автоколебаний, что значительно улучшает управляемость автомобиля и уменьшает износ шин.
Техническим результатом заявленного исполнительного механизма рулевого управления транспортного средства является создание новой системы автоматического блокирования управляемых колес, что приведет к полному ограждению водителя от вредного воздействия автоколебаний управляемых колес, а также к снижению самих автоколебаний, т. е. улучшению управляемости транспортного средства и уменьшению износа шин.
Указанный технический результат достигается тем, что исполнительный механизм рулевого управления транспортного средства, включающий корпус рулевого механизма с установленной в нем зубчатой шестерней рулевого вала, зацепляющейся с зубчатой шестерней приводного валика, и рулевой привод с рулевыми тягами, кинематически связанными с управляемыми колесами, снабжен механизмом автоматического блокирования управляемых колес, в корпусе с крышками которого установлена гайка, соединенная с приводным валиком и связанная самотормозящимся винтовым шариковым соединением с поперечной винтовой тягой, соединенной с рулевыми тягами, в которой выполнен сквозной продольный паз винтовой тяги с возможностью взаимодействия с направляющим стержнем, расположенным в корпусе механизма автоматического блокирования управляемых колес, при этом величина полного хода поперечной винтовой тяги равна длине сквозного продольного паза.
Благодаря тому, что исполнительный механизм рулевого управления транспортного средства включает новую исполнительную систему в виде механизма автоматического блокирования управляемых колес, снабженного самотормозящимся винтовым шариковым соединением гайки, кинематически связанной с рулевым механизмом, и поперечной винтовой тяги, кинематически связанной с управляемыми колесами, создается автоматическое блокирование управляемых колес, что обеспечивает значительное снижение их автоколебаний как при отсутствии, так и при наличии управляющего воздействия со стороны рулевого колеса, тем самым улучшается управляемость транспортного средства и защита водителя от автоколебаний управляемых колес, а также уменьшается износ шин.
Вследствие того, что механизм автоматического блокирования управляемых колес связан с рулевыми тягами рулевого привода посредством поперечной винтовой тяги, в которой выполнен сквозной продольный паз, взаимодействующий с направляющим стержнем корпуса механизма автоматического блокирования управляемых колес и имеющий длину, равную полному ходу поперечной винтовой тяги, обеспечивается поступательное перемещение поперечной винтовой тяги совместно с рулевыми тягами рулевого привода и ограничивается осевое перемещение поперечной винтовой тяги, тем самым достигается автоматическое блокирование управляемых колес при наличии управляющего воздействия со стороны рулевого колеса.
Проведенный заявителем анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации и выявление источников, содержащих сведения об аналогах заявленного изобретения, позволил установить, что заявителем не обнаружен аналог, характеризующийся признаками, идентичными всем осуществленным признакам заявленного изобретения, а определение из перечня выявленных аналогов прототипа, как наиболее близкого по совокупности признаков аналога, позволил выявить совокупность существенных по отношению к усматриваемому техническому результату отличительных признаков в заявленном объекте, изложенном в формуле изобретения.
Следовательно, заявленное изобретение соответствует требованию "новизна" по действующему законодательству.
Для проверки соответствия заявленного изобретения требованию изобретательского уровня, заявитель провел дополнительный поиск известных решений с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявленного изобретения, результат которого показывает, что заявленное изобретение не следует для специалиста явным образом из известного уровня техники.
Следовательно, заявленное изобретение соответствует требованию "изобретательский уровень".
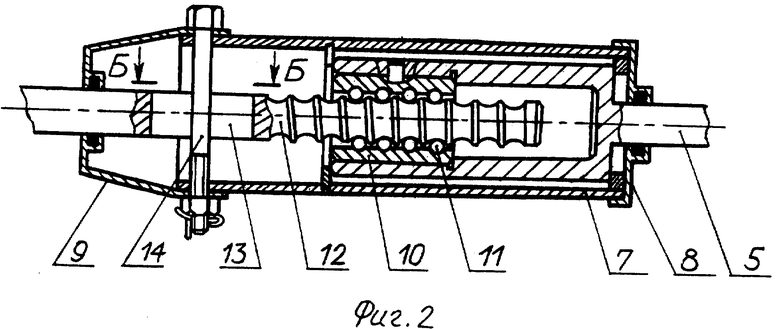
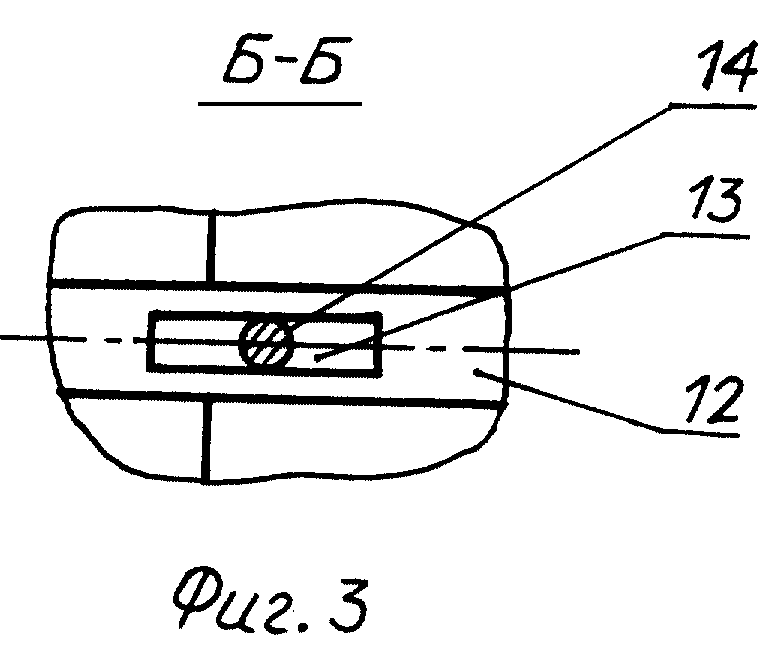
На фиг. 1 изображена схема рулевого управления транспортного средства с предлагаемым исполнительным механизмом, на фиг. 2 - продольный разрез исполнительного механизма по А-А (на фиг. 1), а на фиг. 3 - разрез по Б-Б (на фиг. 2).
Исполнительный механизм рулевого управления транспортного средства, включающий корпус 1 рулевого механизма, в котором установлена коническая зубчатая шестерня 2 рулевого вала 3, обеспечивающая возможность наклона оси рулевого вала 3 в продольной вертикальной плоскости, зацепляющаяся с конической зубчатой шестерней 4 приводного валика 5, и рулевой привод с рулевыми тягами 6, кинематически связанными с управляемыми колесами, снабжен механизмом автоматического блокирования управляемых колес, корпус 7 с крышками 8 и 9 которого жестко закреплен на раме транспортного средства. В корпусе 7 механизма автоматического блокирования управляемых колес установлена гайка 10, соединенная с приводным валиком 5, передающим ей крутящий момент, и связанная самотормозящимся винтовым шариковым соединением 11 с поперечной винтовой тягой 12, приводящая в движение поперечную винтовую тягу 12, передающую усилие рулевым тягам 6 рулевого привода, что обеспечивает блокирование управляемых колес от воздействия усилий, например со стороны неровностей дороги, нарушающих намеченный курс движения транспортного средства, действующих поперек направления движения транспортного средства, как при отсутствии управляющего воздействия со стороны рулевого колеса, так и при его наличии. В поперечной винтовой тяге 12 выполнен сквозной продольный паз 13 с возможностью взаимодействия с направляющим стержнем 14, расположенным в корпусе 7 механизма автоматического блокирования управляемых колес перпендикулярно оси поперечной винтовой тяги 12, что обеспечивает поступательное осевое перемещение поперечной винтовой тяги 12 совместно с рулевыми тягами 6 рулевого привода и невозможность проворота ее совместно с гайкой 10, при это величина полного хода поперечной винтовой тяги 12 равна длине сквозного продольного паза 13, тем самым ограничивается перемещение поперечной винтовой тяги 12.
Предлагаемый исполнительный механизм работает следующим образом.
При прямолинейном движении автомобиля зубчатая шестерня 2 рулевого вала 3, установленная в корпусе 1 рулевого механизма, зацепляющаяся с зубчатой шестерней 4 приводного валика 5, неподвижна, в результате чего силовое воздействие на приводное валик 5 и соединенную с ним гайку 10, связанную самотормозящимся винтовым шариковым соединением 11 с поперечной винтовой тягой 12, отсутствует, поперечная винтовая тяга 12 находится в среднем положении, при этом вертикальная ось симметрии сквозного продольного паза 13 совпадает с осью направляющего стержня 14, расположенного в корпусе 7 с крышками 8 и 9 механизма автоматического блокирования управляемых колес.
В этом случае самотормозящееся винтовое шариковое соединение 11 поперечной винтовой тяги 12 с гайкой 10, соединенной с приводным валиком 5, не обеспечивает вращение гайки 10 при силовом воздействии на поперечную винтовую тягу 12 со стороны управляемых колес и рулевых тяг 6, тем самым достигается блокирование управляемых колес от воздействия усилий, например со стороны неровностей дороги, нарушающих намеченный курс движения транспортного средства, действующих поперек направления движения транспортного средства, при отсутствии управляющего воздействия со стороны рулевого колеса.
При повороте рулевого колеса зубчатая шестерня 2 рулевого вала 3, установленная в корпусе 1 рулевого механизма, зацепляющаяся с зубчатой шестерней 4 приводного валика 5, приводит в движение приводной валик 5 и соединенную с ним гайку 10, связанную самотормозящимся винтовым шариковым соединением 11 с поперечной винтовой тягой 12, при этом сквозной продольный паз 13, выполненный в поперечной винтовой тяге 12, взаимодействует с направляющим стержнем 14 корпуса 7 с крышками 8 и 9 механизма автоматического блокирования управляемых колес, а поперечная винтовая тяга 12 перемещается влево или вправо, в зависимости от направления поворота рулевого колеса, и перемещает рулевые тяги 6, кинематически связанные с управляемыми колесами, что обеспечивает поворот управляемых колес.
В этом случае самотормозящееся винтовое шариковое соединение 11 поперечной винтовой тяги 12 с гайкой 10, соединенной с приводным валиком 5, не обеспечивает вращение гайки 10 при силовом воздействии на поперечную винтовую тягу 12 со стороны управляемых колес и рулевых тяг 6, тем самым достигается блокирование управляемых колес от воздействия усилий, например со стороны неровностей дороги, нарушающих намеченный курс движения транспортного средства, действующих поперек направления движения транспортного средства, при наличии управляющего воздействия со стороны рулевого колеса.
Предлагаемый исполнительный механизм рулевого управления транспортного средства обеспечивает полную защиту водителя от вредного влияния автоколебаний управляемых колес и способствует снижению самих автоколебаний благодаря наличию в нем механизма автоматического блокирования управляемых колес.
Таким образом, вышеизложенное свидетельствует о выполнении при использовании заявленного изобретения следующей совокупности условий:
- исполнительный механизм рулевого управления транспортного средства, воплощающий заявленное изобретение при его осуществлении, предназначен для применения в рулевом управлении транспортных средств, в частности легковых автомобилей с механическим передаточным механизмом, преимущественно для автомобилей, снабженных антиблокировочной системой, что обеспечивает резкое снижение автоколебаний управляемых колес, в результате чего значительно улучшается управляемость автомобиля, повышаются эргономические характеристики и снижается износ шин;
- для заявленного изобретения, в том виде как оно охарактеризовано в формуле изобретения, подтверждена возможность его осуществления в соответствии с описанием и прилагаемым чертежом;
- исполнительный механизм рулевого управления транспортного средства, воплощающий заявленное изобретение при его осуществлении, способен обеспечить достижение усматриваемого заявителем технического результата. Следовательно, заявленное изобретение соответствует требованию "промышленная применимость".
Изобретение относится к рулевому управлению транспортных средств, в частности к рулевому управлению легковых автомобилей с механическим передаточным механизмом, преимущественно для автомобилей, снабженных антиблокировочной системой. Исполнительный механизм рулевого управления транспортного средства включает корпус рулевого механизма с установленной в нем зубчатой шестерней рулевого вала, зацепляющейся с зубчатой шестерней приводного валика, рулевой привод с рулевыми тягами, кинематически связанными с управляемыми колесами, механизм автоматического блокирования управляемых колес, в жестко закрепленном на раме транспортного средства корпусе которого установлена гайка, соединенная с приводным валиком и связанная самотормозящимся винтовым шариковым соединением с поперечной винтовой тягой, соединенной с рулевыми тягами. В ней выполнен сквозной продольный паз винтовой тяги с возможностью взаимодействия с направляющим стержнем, расположенным в корпусе для обеспечения поступательного перемещения поперечной винтовой тяги. Техническим результатом заявленного исполнительного механизма является ограждение водителя от вредного воздействия автоколебаний управляемых колес, снижение автоколебаний, улучшение управляемости транспортного средства и уменьшение износа шин. 3 ил.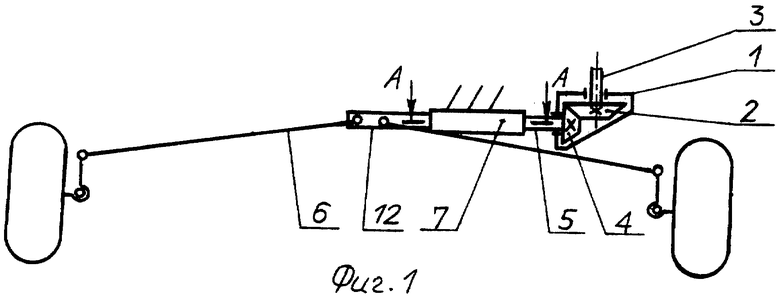
Исполнительный механизм рулевого управления транспортного средства, включающий корпус рулевого механизма с установленной в нем зубчатой шестерней рулевого вала, зацепляющейся с зубчатой шестерней приводного валика, и рулевой привод с рулевыми тягами, кинематически связанными с управляемыми колесами, отличающийся тем, что он снабжен механизмом автоматического блокирования управляемых колес, в корпусе с крышками которого установлена гайка, соединенная с приводным валиком и связанная самотормозящимся винтовым шариковым соединением с поперечной винтовой тягой, соединенной с рулевыми тягами, в которой выполнен сквозной продольный паз винтовой тяги с возможностью взаимодействия с направляющим стержнем, расположенным в корпусе механизма автоматического блокирования управляемых колес, при этом величина полного хода поперечной винтовой тяги равна длине сквозного продольного паза.
| Рулевой механизм транспортного средства | 1976 |
|
SU931560A1 |
| US 4228696 А, 21.10.1980 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
