Изобретение относится к технике приема (обнаружения) импульсных радиосигналов при наличии сигналов мешающих отражений (интерференционных замираний) и белого шума и может быть использовано в системах передачи дискретной информации и в радиолокации.
Актуальность данной проблемы обусловлена тем, что в реальных условиях в большинстве каналов связи в точку приема, кроме основного сигнала (в радиоканалах - первого луча), приходят дополнительные мешающие сигналы, порожденные основным сигналом, с перекрытием с ним во времени, вследствие чего, как известно, возникают интерференционные замирания. Если при значительном временном перекрытии (более 50% длительности посылки) мешающий сигнал окажется в противофазе с основным сигналом, то это приведет к резкому уменьшению амплитуды основного сигнала и, следовательно, к большой вероятности ошибки в регистрации соответствующего информационного символа на фоне белого шума. А поскольку начальная фаза мешающего радиосигнала, как правило, является случайной величиной, равновероятно распределенной в интервале (-π,π), то это обстоятельство в конечном итоге приведет к существенному снижению помехоустойчивости (достоверности) обнаружения соответствующих импульсных радиосигналов.
Теоретически, путем статистического синтеза данную задачу решить не удается, поскольку не удается получить n-мерную плотность вероятностей смеси основного сигнала, мешающего со случайной начальной фазой, порожденного основным сигналом, и белого шума для записи отношения функций правдоподобия, из которого, как известно, определяется оптимальный (или квазиоптимальный) алгоритм обнаружения сигнала.
Поэтому существующие практические способы обнаружения и обработки импульсных радиосигналов в данных условиях разработаны, главным образом, исходя из физических соображений.
Известен способ обнаружения импульсного радиосигнала на фоне мешающих радиоимпульсов при многолучевом распространении радиоволн и белого шума, в основу реализации которого положено использование так называемого испытательного импульса, по реакции канала на который в приемнике регулируется линейный четырехполюсник с целью компенсации мешающих радиосигналов, кроме первого (основного) (Л.М. Финк. Теория передачи дискретных сообщений. М.: Сов. радио, 1970, с.487-488).
К недостаткам данного способа относится сложность в его технической реализации, а также то, что он практически не применим для каналов с быстрыми замираниями, при которых импульсная функция канала H(t,τ) может существенно измениться между двумя соседними посылками испытательного импульса, что приведет к неверной регулировке параметров компенсирующего четырехполюсника и, следовательно, к невозможности эффективной компенсации мешающих радиосигналов. Кроме того, даже при медленных замираниях этот способ работает только при относительно низком уровне аддитивных помех в канале, так как при большом уровне помех будет необратимо искажена помехами импульсная функция канала H(t,τ) с последствиями, аналогичными при быстрых эамираниях.
Дополнительно к этому, наличие постоянно действующего испытательного импульса снижает общую пропускную способность канала связи.
Другим известным способом обнаружения сигнала при наличии сигналов мешающих отражений является, так называемый, метод защитного промежутка, сущность которого заключается в том, что при известной длительности реакции канала L и длительности сигнала T на решающую схему приемника подаются только отрезки сигнала длительностью T-L, на которых не происходит перекрытия во времени соседних элементов (Л.М. Финк. Теория передачи дискретных сообщений.М.: Сов. радио, 1970, с.463).
Существенным недостатком данного способа обнаружения является уменьшение рабочей энергии информационных сигналов за счет исключения перекрытых во времени отрезков сигнала, что в конечном итоге на фоне белого шума приводит к пропорциональному снижению помехоустойчивости (достоверности) обнаружения.
Аналогично данному способу можно организовать передачу информации так, при которой длительность сигналов будет меньше времени запаздывания сигналов мешающих отражений, а паузы между сигналами должны быть соизмеримы или больше суммарной длительности реакции канала. При таком режиме передачи перекрытие во времени основного и мешающих сигналов будет отсутствовать и можно вести прием информации на обычную решающую схему, когда присутствуют в канале связи только флуктуационные помехи.
Недостатком такого режима передачи является уменьшение энергии информационного сигнала при ограниченной мощности радиопередатчика, а также неэффективное расширение полосы частот канала связи за счет уменьшения длительности сигнала при неизменной скорости передачи информации.
Кроме перечисленных способов, для повышения достоверности приема информации в условиях интерференционных замираний применяют методы разнесения элементов сигнала по времени или (u) по частоте.
Сущность разнесения по времени заключается в том, что каждый элемент сигнала передается дважды или трижды с интервалом времени, превышающим время корреляции замираний. Сущность частотного разнесения заключается в дублировании передаваемого элемента сигнала в разных полосах частот (Л.М. Финк. Теория передачи дискретных сообщений. М.: Сов. радио, 1970, с. 398-399).
Недостатки этих способов очевидны: при разнесении по времени замедляется результирующая скорость передачи информации, а при частотном разнесении увеличивается общая занимаемая полоса частот каналом связи при неизменной скорости передачи.
Таким образом, краткий анализ известных способов обнаружения импульсных радиосигналов в условиях мешающих сигналов, приводящих к интерференционным замираниям, свидетельствует об актуальности и незавершенности решения данной проблемы.
Наиболее близким к предлагаемому является способ обнаружения импульсного радиосигнала, содержащий последовательное выполнение операций согласованной фильтрации исходного сигнала с последующим пороговым принятием решения о его наличии или отсутствии по выбранному критерию (Л.М. Финк. Теория передачи дискретных сообщений. М.: Сов.радио, 1970, с.157-158).
Недостатком данного способа обнаружения является изменение мощности сигнала, по которому принимается решение по причине интерференционных замираний и, как следствие этого, - снижение достоверности его обнаружения на фоке белого шума. Причем, чем больше временное перекрытие основного и мешающего радиоимпульсов, тем хуже будут качественные характеристики обнаружения.
Технический результат изобретения заключается в повышении помехоустойчивости обнаружения импульсного радиосигнала на фоне мешающего радиоимпульса и белого шума при неизменных энергетических и частотно-временных ресурсах канала связи.
Данный технический результат достигается за счет учета существенного различия в формах результирующего выходного сигнала согласованного фильтра (с учетом мешающего сигнала) и корреляционной функции выходного шума. Это обстоятельство позволяет использовать дополнительную информацию о шуме, полученном в опорном отсчете, определяемым точкой пересечения огибающих основного и мешающего сигналов на выходе согласованного фильтра. В результате итоговое решение о наличии или отсутствии сигнала по выбранному критерию принимают на основе двух частных решений: по безотносительному наличию или отсутствию сигнала на выходе согласованного фильтра и по наличию или отсутствию сигнала на выходе того же согласованного фильтра относительно значения шума, измеренного в опорном отсчете. При этом правило принятия итогового решения следующее: сигнал обнаруживается, если хотя бы в одном из частных каналов обработки он регистрируется, в противном случае принимается решение об отсутствии сигнала в канале связи.
Для чего совместно с известным основным каналом обнаружения радиосигнала, включающим согласованную фильтрацию сигнала с последующим пороговым принятием решения о его наличии или отсутствии по выбранному критерию, формируют дополнительный канал обнаружения, в котором осуществляют оценку постоянной составляющей времени задержки между информационным и мешающим сигналами, на основе чего определяют момент времени τ0 взятия опорного отсчета, в котором измеряют мгновенное значение шума Uш(τo) на выходе согласованного фильтра и вычисляют его коэффициент корреляции r(τo) между опорным и информационным отсчетами, по которому при известной мощности выходного шума Pш согласованного фильтра и заданной вероятности ложной тревоги PF вычисляют значение порога принятия решения по формуле:
который устанавливают в управляемом пороговом устройстве дополнительного канала обнаружения,
где Ф-1(. ) - функция, обратная табулированному интегралу вероятности; при этом результирующее решение о наличии или отсутствии сигнала принимают на основе соответствующих частных решений по основному и дополнительному каналам обнаружения по правилу: сигнал обнаруживается, если хотя бы в одном из частных каналов обнаружения он регистрируется.
Таким образом, данный способ обнаружения импульсного радиосигнала в отличие от существующих аналогов для своей реализации не требует знания текущей импульсной (частотной) характеристики канала, изменяющейся во времени по случайному закону и, следовательно, не требует постоянно-действующих зондирующих сигналов, снижающих пропускную способность канала. Способ не требует также разнесения по времени и по частоте, а позволяет в рамках неизменных энергетических и частотно-временных ресурсов повысить помехоустойчивость (достоверность) обнаружения радиосигналов.
Наличие в приемнике двух каналов обработки сигнала взаимно дополняют друг друга по эффективности обнаружения. В предлагаемом способе особенность механизма обнаружения такова, что если в одном канале условия обнаружения ухудшаются, то во втором канале в тот же момент времени условия обнаружения улучшаются автоматически и в результате показатели итогового обнаружения практически не ухудшаются.
Например, если мешающий радиоимпульс находится в фазе с основным информационным радиоимпульсом, то амплитуда результирующего сигнала в момент его регистрации резко возрастает. При этом достоверность обнаружения по основному каналу увеличится, а по дополнительному каналу уменьшится за счет возникновения составляющей сигнала (подставки) в опорном отсчете, так как в этом случае провал в нем не будет нулевым.
Если мешающий радиоимпульс находится в противофазе с информационным, то, наоборот, условия обнаружения по основному каналу ухудшатся по причине уменьшения амплитуды результирующего сигнала в момент его отсчета на фоне белого шума, а по дополнительному каналу условия обнаружения улучшатся, так как при этом исчезнет или станет ничтожно малой составляющая сигнала (подставка) в опорном отсчете. При этом в опорном отсчете будет измеряться только один шум на выходе согласованного фильтра, по значению которого оценивается мгновенное значение шума в информационном отсчете, и на основе чего устанавливают требуемый переменный порог в соответствии с выражением (1).
При промежуточных фазовых соотношениях информационного и мешающего радиосигналов соответствующим образом будет перераспределяться значение достоверности обнаружения в каналах обработки.
Причем, чем меньше временное перекрытие информационного и мешающего радиосигналов, тем достоверность обнаружения по основному каналу будет выше и оставаться стабильной. В это же время достоверность обнаружения по дополнительному каналу будет меньше, так как при этом опорная точка (точка взятия опорного отсчета) по времени будет дальше отстоять от информационной точки и, следовательно, степень корреляционной связи помехи между этими точками также станет меньше. В предельном случае при r(τ0)_→ 0 порог из выражения (1) будет стремиться к известной постоянной величине, равной
и, следовательно, никакого дополнительного вклада в результирующую достоверность обнаружения второй канал обработки не внесет. Это очевидно и следует из теории потенциальной помехоустойчивости: если временное перекрытие основного и мешающего сигналов мало, то мешающим сигналом практически можно пренебречь и достоверность обнаружения сигнала будет определяться только его исходной энергией и уровнем спектральной плотности мощности белого шума. При этом основной канал обнаружения будет оптимальным на фоне белого шума и, следовательно, характеристики обнаружения никак не могут быть выше потенциально достижимых.
Наоборот, при увеличении времени перекрытия информационного и мешающего сигналов опорная точка по времени будет приближаться к информационной точке, что приведет к увеличению коэффициента корреляции шума между этими точками и, следовательно, к уменьшению условной мощности шума в информационной точке. При этом начнет "работать управляемый порог" в соответствии с выражением (1), в результате эффективность дополнительного канала обработки по обнаружению сигнала будет преобладать над эффективностью основного канала обнаружения, и, как будет показано ниже, итоговая эффективность обнаружения (с одновременным использованием двух каналов) будет оставаться практически неизменной, как при отсутствии мешающего сигнала.
Таким образом, данный комбинированный способ обнаружения обладает той фундаментальной особенностью, что он практически нейтрализует мешающий радиосигнал даже при значительных временных перекрытиях его с информационным сигналом.
Представим доказательство наличия указанного технического результата в предлагаемом способе обнаружения.
Пусть обнаруживаемый выходной радиосигнал согласованного фильтра имеет вид
u1(t)=U1(t)cos w0(t), (3)
где U1(t) и w0 - соответственно огибающая радиосигнала (медленно меняющаяся функция) и его частота.
При этом мешающий радиосигнал на выходе согласованного фильтра, перекрытый во времени с основным радиосигналом
где U2(t), t0, Δt соответственно огибающая мешающего радиосигнала, постоянная составляющая времени задержки относительно информационного сигнала и случайный временной сдвиг, обуславливающий случайность начальной фазы при взаимодействии с информационным сигналом.
Обозначим woto= ϕ0 - константа, а woΔt = ф - случайная величина, изменяющаяся по равновероятному закону в интервале (-π,π), и, учитывая ничтожно малое изменение Uz(t) при изменении Δt, перепишем выражение (4)
U2(t) = U2(t-to)cos(wot-ϕo-ф). (5)
При этом результирующий сигнал на выходе согласованного фильтра будет определяться суммой сигналов (3) и (5), который после некоторых преобразований будет равен
В момент отсчета, при t=0 модуль результирующего сигнала, по которому принимается решение, будет равен
Из (7) видно, что результирующий сигнал на выходе согласованного фильтра в момент t=0, который определяет помехоустойчивость обнаружения, зависит от фазы ф.
Поскольку фаза ф изменяется по случайному равновероятному закону, то, следовательно, по случайному закону будет изменяться и амплитуда результирующего сигнала.
Известно, что вероятности ложной тревоги и правильного обнаружения детерминированного сигнала определяются следующими выражениями (В.И. Тихонов. Оптимальный прием сигналов. М.: Радио и связь, 1983, с.79-80):
где Ф (.) - табулированный интеграл вероятности;
Um, П - соответственно, амплитуда сигнала в момент отсчета (принятия решения) и абсолютное значение порога принятия решения.
По критерию Неймана-Пирсона, для обеспечения заданной вероятности ложной тревоги PF * при мощности шума на выходе согласованного фильтра Pш абсолютный порог в соответствии с выражением (8) должен быть равен
После подстановки в (9) вместо Um и П соответствующих выражений (7) и (10) подучим выражение для вероятности правильного обнаружения сигнала в первом канале обнаружения, которая характеризует прототип, поскольку по определению в нем используется одноканальное обнаружение
Для получения безотносительной вероятности правильного обнаружения необходимо выражение (11) усреднить по всем возможным значениям фазы ф
Исследования показывают, что интеграл (12) не выражается ни в элементарных, ни в известных специальных функциях. Поэтому решение его возможно только численным методом.
Для нахождения вероятности правильного обнаружения сигнала во втором дополнительном канале обработки необходимо определить момент взятия опорного отсчета (опорную точку) из условия равенства огибающих основного и мешающего радиосигналов
U1(t) = U2(t-t0) (13)
В общем виде решение уравнения (13) будет следующим
t
где F(.) - некоторая функция своих аргументов;
t0 - начальное время задержки мешающего сигнала относительно информационного;
α1,...,αn - параметры, характеризующие форму информационного сигнала;
β1,...,βm - параметры, характеризующие форму мешающего сигнала.
Практически, как будет показано ниже, в реальной ситуации задача определения t0 * значительно упрощается, так как мешающий сигнал, как правило, имеет такую же форму и параметры, как и информационный, поскольку он им порождается.
Далее, определяем истинное положение опорной точки τo. Для чего находим количество периодов высокочастотного изменения коэффициента корреляции до точки t0 *
где квадратные скобки означают операцию округления результата до ближайшего целого числа;
Tвч- период высокочастотного изменения коэффициента корреляции выходного шума согласованного фильтра.
При этом искомая опорная точка с учетом (14) и (15)
Известно, что коэффициент корреляции выходного шума согласованного фильтра совпадает с нормированным выходным сигналом этого фильтра, в результате имеем
Поскольку до точки τo по условию укладывается целое число периодов высокочастотной части коэффициента корреляции, то, следовательно, его значение в точке τo будет равно
При этом условная мощность выходного шума согласованного фильтра в момент отсчета информационного символа относительно опорного отсчета будет равна (Е.С. Вентцель. Теория вероятностей. М.: Наука, 1969, с.191-192)
Pшусл= Pш(1-r2(τo)]. (19)
Из (19) следует, что чем меньше будет интервал времени между информационным и опорным отсчетами τo, тем больше будет коэффициент корреляции шума r(τo), тем меньше будет условная мощность шума Pшусл при принятии решения и, следовательно, лучше будут характеристики обнаружения в дополнительном канале обработки по сравнению с основным каналом.
Условная амплитуда сигнала в момент принятия решения относительно этого же опорного отсчета будет равна
где Uрез (O, ф) определяется выражением (7), a Uрез(τo,ф) определяется результирующей амплитудой информационного и мешающего сигналов в опорном отсчете. Эту амплитуду можно вычислить аналогично (7), с учетом того, что U1(τo)≈U2(τo-to) и фазовые соотношения здесь сохраняются такими же, как и в (7), так как до точки τo укладывается целое число периодов высокой частоты. В результате получим
Вероятность ложной тревоги в дополнительном канале обнаружения (с опорным отсчетом) с учетом (8) и (19) будет равна
При этом вероятность правильного обнаружения сигнала в этом же дополнительном канале обработки с учетом (9), (19) и (20) будет иметь вид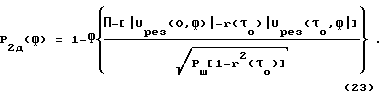
Если выразить порог П из (22) через заданную вероятность ложной тревоги, аналогично (10) и подставить его в выражение (23), а вместо Uрез (O, ф) и Uрез(τo,ф) подставить соответствующие выражения (7) и (21), то получим окончательное выражение для расчета вероятности правильного обнаружения сигнала во втором дополнительном канале обработки
Аналогично (12), для получения безотносительной (усредненной) вероятности правильного обнаружения необходимо выражение (24) проинтегрировать по всем возможным изменениям фазы ф
Интеграл (25) можно решить только численным методом.
Поскольку в предлагаемом способе обнаружения итоговое решение о наличии или отсутствии сигнала выносится по соответствующим частным решениям двух каналов обработки, то ложная тревога будет иметь место в том случае, если при отсутствии сигнала, хотя бы в одном из каналов обработки помеха превысит порог.
Если вероятности частной ложной тревоги в обоих каналах обработки принять одинаковыми и равными P1F *=2P2F *=PF *, то при этом результирующая вероятность ложной тревоги
PFрез = 1-(1-P1F *)(1-P2F *) = 1-(1-PF *)2, (26)
откуда
Таким образом, при заданной результирующей вероятности ложной тревоги PFрез по выражению (27) определяется частное значение вероятности ложной тревоги PF * которое должно быть подставлено в соответствующие выражения для вычисления вероятностей правильного обнаружения в первом (11) и во втором (24) каналах обработки.
Аналогично, результирующее правильное обнаружение будет регистрироваться, если при наличии сигнала в канале он будет обнаружен на выходе хотя бы одного из каналов обработки. В соответствии с этим алгоритмом
Pдрез = 1-(1-P1д)(1-P2д) (28)
После подстановки в (28) вместо P1д и P2д соответствующих выражений (11) и (24), с учетом (27), получим
Для получения безотносительной результирующей вероятности правильного обнаружения необходимо аналогично (12) и (25) осуществить усреднение выражения (29) по всем возможным значениям фазы ф
Интеграл (30) также не выражается ни в элементарных, ни в известных специальных функциях, поэтому решение его возможно только численным методом.
Рассмотрим частный случай, когда радиосигнал на выходе согласованного фильтра имеет гауссову форму
а мешающий сигнал имеет такую же форму и параметры, но только сдвинутый по времени относительно информационного сигнала на время to±Δt
где ϕo= Woto постоянный фазовый сдвиг, а ф = WoΔt - случайная начальная фаза, равновероятно распределенная в интервале (-π,π).
В соответствии с выражением (13) находим точку пересечения огибающих информационного и мешающего сигналов из условия
откуда искомая точка пересечения огибающих
Для количественной оценки временного перекрытия сигналов необходимо знать их длительности. Эффективную длительность гауссова импульса (31) определим из условия уменьшения амплитуды огибающей сигнала до уровня 0,1 от ее максимальной величины: , откуда длительность сигнала
, откуда длительность сигнала
Введем параметр x, характеризующий относительное временное перекрытие информационного и мешающего сигналов на выходе согласованного фильтра
При этом временной сдвиг сигналов t0, выраженный через x, с учетом (35), будет равен
Для получения численного значения вероятности правильного обнаружения в способе-прототипе и в предлагаемом способе положим, что отношение сигнал/шум по мощности на выходе согласованного фильтра при наличии только одного информационного сигнала равно Um 2/Pш= 2E/N0= 40, где E, N0 - соответственно энергия сигнала и спектральная плотность мощности белого шума. При этом отношение сигнал/шум по напряжению будет равно  Если принять амплитуду сигнала в момент отсчета Um=Uo=U1(0)=1, то
Если принять амплитуду сигнала в момент отсчета Um=Uo=U1(0)=1, то 
Пусть частота радиосигнала, на которой осуществляется его обработка, равна fо=500 кГц, а относительное время перекрытия информационного и мешающего сигналов x=0,7, при котором абсолютное время задержки между этими сигналами при а=1 в соответствии с формулой (37) будет равно
При этом, в соответствии с (34), точка пересечения огибающих информационного и мешающего сигналов
В соответствии с (15) и (16) момент взятия опорного отсчета будет равен
То, что τo, в данном случае точно совпало со значением tо *, не должно вызывать сомнений, так как при данных исходных параметрах число, стоящее под операцией округления до ближайшего целого, оказалось целым числом (без остатка).
При данном τo, в соответствии с (18) и (31), коэффициент корреляции помехи на выходе согласованного фильтра между опорным и информационным отсчетами будет равен
а значение огибающей мешающего сигнала в точке принятия решения (t=0) будет равно
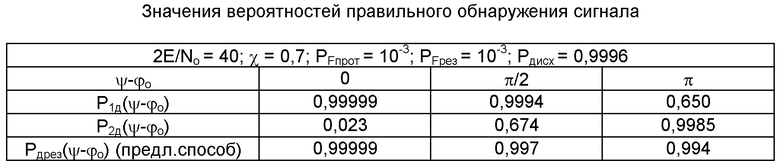
При этих значениях и равных вероятностях ложной тревоги в способе-прототипе и в предлагаемом способе PFпрост.=PFреза=10-3 и характерных соотношениях начальных фаз между информационным и мешающим сигналами (ϕo-ф) = {0,π/2,π} по формулам (11), (24) и (29) рассчитаны и сведены в таблицу значения вероятности правильного обнаружения сигнала раздельно в первом канале обработки P1д (прототип), во втором дополнительном канале обработки P2д и в предлагаемом способе Pдрез, в котором использованы одновременно два канала обнаружения (см. таблицу в конце описания).
В первой головке таблицы приведено значение исходной вероятности правильного обнаружения Pдисх при отсутствии мешающего сигнала, рассчитанной по формуле (11) при U2(t)=0. Расчеты при сдвигах фаз от -π до 0 в таблице не приведены, поскольку они дают такие же результаты, как при симметричных сдвигах фаз от 0 до π,
Из таблицы следует, что с увеличением сдвига фаз между информационным и мешающим сигналами вероятность правильного обнаружения в первом канале обработки (в прототипе) P1д уменьшается, а при сдвиге фаз, равном π становится равной 0,650. При этом во втором дополнительном канале обработки тенденция противоположная:
с увеличением фазового сдвига вероятность правильного обнаружения P2д увеличивается от значения 0,023 при (ф-ϕo) = 0 до О,9985 при (ф-ϕo) = π. Результирующая вероятность правильного обнаружения Pдрез, которая в целом характеризует предлагаемый способ с изменением фазового сдвига, изменяется незначительно и практически не уменьшается ниже 0,999.
Средняя (безотносительная) вероятность правильного обнаружения в первом канале обработки (в прототипе) при данных сдвигах фаз будет равна
а средняя вероятность пропуска сигнала в этом случае
Средняя вероятность правильного обнаружения сигнала в предлагаемом способе
при этом средняя результирующая вероятность пропуска сигнала
В результате выигрыш предлагаемого способа по сравнению с прототипом по вероятности пропуска сигнала составит величину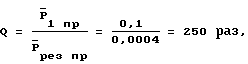
что эквивалентно выигрышу по мощности передатчика более чем в два раза. Иными словами, чтобы в прототипе получить такую же вероятность правильного обнаружения, как и предлагаемом способе, при одинаковых параметрах канала в условиях интерференционных замираний необходимо увеличить мощность передатчика более чем в два раза. А это обстоятельство, как известно, кроме усложнения передатчика и соответствующих энергетических затрат понижает скрытность функционирования и ухудшает электромагнитную совместимость радиотехнических систем. В системах связи полученный выигрыш по мощности передатчика при заданной помехоустойчивости приема можно перевести в соответствующий выигрыш по скорости передачи информации.
При сравнении между собой средней вероятности правильного обнаружения в предлагаемом способе с исходной вероятностью при отсутствии мешающего сигнала оказалось, что они не отличаются по своим значениям. Это свидетельствует о высокой "мощности" предлагаемого способа обнаружения по нейтрализации мешающего сигнала. Система обнаружения с двумя каналами обработки сигнала по эффективности ведет себя так, как будто бы мешающий сигнал отсутствует.
Таким образом, выигрыш в помехоустойчивости обнаружения сигнала предлагаемого способа по сравнению с прототипом свидетельствует о наличии причинно-следственной связи между совокупностью существенных признаков и достигаемым техническим результатом.
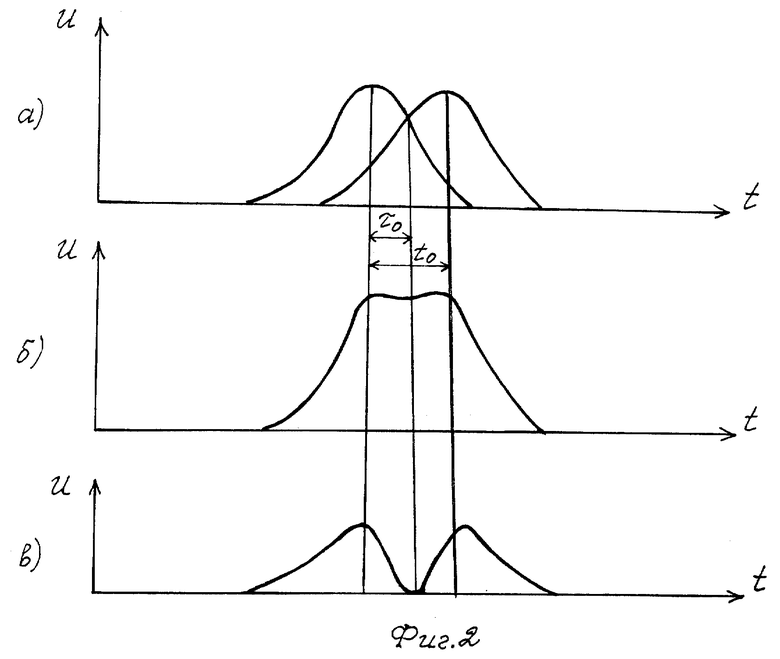
На фиг. 1 представлена структурная электрическая схема устройства, реализующая предлагаемый способ обнаружения сигнала, а на фиг. 2 - временные диаграммы взаимодействия информационного и мешающего сигналов (на уровне огибающих), поясняющие сущность предлагаемого способа.
Устройство (фиг. 1) содержит согласованный фильтр 1, неуправляемое пороговое устройство 2, устройство 3 оценки постоянной составляющей времени задержки tо между информационным и мешающим сигналами, вычислитель 4 опорного отсчета τo вычислитель 5 коэффициента корреляции шума r(τo) на выхода согласованного фильтра, измеритель 6 значения шума в опорном отсчете Uш(τo); вычислитель 7 порога П(τo); элемент задержки 8 сигнала на время τo; управляемое пороговое устройство 9 и решающее устройство 10.
Устройство работает следующим образом.
Импульсный информационный радиосигнал в смеси с мешающим, перекрытым во времени радиосигналом и белым шумом, поступает на объединенные входы согласованного фильтра 1 и устройства 3 оценки постоянной составляющей времени задержки информационного и мешающего сигналов t0. Результат этой оценки поступает на вычислитель 4 момента опорного отсчета τo, который определяют в соответствии с выражением (16). Сигнал момента опорного отсчета τo с выхода вычислителя 4 поступает на вычислитель 5 коэффициента корреляции выходного шума согласованного фильтра r(τo), который определяют в соответствии с выражением (18).
Одновременно сигнал момента опорного отсчета τo с выхода вычислителя 4 поступает на первый (разрешающий) вход измерителя 6 шума в опорном отсчете и на первый управляющий вход элемента задержки 8 сигнала на время τo, на вторые входы которых поступает сигнал, смешанный с шумом с выхода согласованного фильтра 1.
Элемент задержки 8 сигнала не является существенным признаком и необходим в связи с тем, что решение по дополнительному каналу обнаружения выносится через время τo после отсчета информационного символа на выходе согласованного фильтра.
С выхода измерителя 6 шума напряжение шума Uш(τo) в момент τo поступает на первый вход вычислителя 7 значения порога П(τo), на второй вход которого поступает значение коэффициента корреляции r(τo) с выхода вычислителя 5. При этом значение порога П(τo) определяют в соответствии с выражением (1). С выхода вычислителя 7 значение порога П(τo) поступает на первый (управляющий) вход управляемого порогового устройства 9, на второй информационный вход которого поступает сигнал с выхода согласованного фильтра 1 через элемент задержки 8. Одновременно сигнал с выхода согласованного фильтра 1 поступает на неуправляемое пороговое устройство 2, порог которого определяют в соответствии с выражением 2.
Сигналы с выходов управляемого порогового устройства 9 и неуправляемого порогового устройства 2 поступают на объединяющее решающее устройство 10, формирующее решение о наличии или отсутствии сигнала на входе устройства и работающее по правилу: сигнал обнаруживается, если хотя бы на выходе одного из пороговых устройств 2 или 9 он регистрируется.
На фиг. 2, а на качественном уровне представлена временная диаграмма перекрытых во времени информационного и мешающего сигналов, причем мешающий сигнал смещен по времени относительно информационного на время t0. Точка τo пересечения огибающих этих сигналов является точкой взятия опорного отсчета, в которой измеряется напряжение шума на выходе согласованного фильтра.
На фиг. 2,б представлена диаграмма результирующего сигнала, когда начальные фазы информационного и мешающего сигналов совпадают. При этом амплитуда результирующего сигнала возрастает и, следовательно, основной вклад в результирующую вероятность правильного обнаружения будет вносить первый безотносительный канал обработки.
На фиг. 2,в представлена диаграмма результирующего сигнала, когда информационный и мешающий сигналы находятся в противофазе. Как видно из этой диаграммы, амплитуда результирующего сигнала в окрестности точки пересечения огибающих сигналов (в окрестности опорной точки (τo) уменьшается и образуется провал с достаточно пологой ложбиной. Это обстоятельство упрощает требования к точности выбора положения точки опорного отсчета τo и, следовательно, к точности оценки постоянной составляющей времени задержки между информационным и мешающим сигналами t0. Причем, очевидно, что "степень пологости" ложбины в окрестности точки τo будет зависеть от крутизны изменения огибающих сигналов в точке их пересечения. Чем медленнее изменяются огибающие в окрестности этой точки, тем шире будет ложбина, и, следовательно, менее жесткими будут требования к точности оценки времени задержки сигналов t0, что имеет важное значение при практической реализации данного способа обнаружения сигналов.
Из представленных диаграмм также следует, что чем больше время перекрытия сигналов, тем ближе по времени будет находиться провал к информационному отсчету, тем сильнее будет корреляция шума между информационным и опорным отсчетами и, следовательно, более достоверно можно предсказать значение шума в момент информационного отсчета. Следовательно, в этом случае основной вклад в результирующую вероятность правильного обнаружения сигнала будет вносить второй дополнительный канал обработки.
Из описания следует, что в состав устройства реализации данного способа, обнаружения сигнала входят следующие блоки: согласованный фильтр 1, неуправляемое пороговое устройство 2 и управляемое пороговое устройство 9, измеритель 6 напряжения шума в опорном отсчете, элемент задержки сигнала, 8, а также решающее устройство 10, которые подробно описаны с конструктивными признаками их технической реализации в книге под редакцией Пестрякова В.В. Шумоподобные сигналы в системах передачи информации. М.: Сов. радио, 1973.
Техническое решение устройства 3 оценки постоянной составляющей времени задержки между информационным и мешающим сигналами может быть выполнено на основе линейного фильтра с радиочастотным дифференцирующим контуром, выделяющим короткие фронты информационного и мешающего сигналов, по положению которых определяют оценку времени задержки. Это устройство описано в книге Ширмана Я.Д. Разрешение и сжатие сигналов. М.: Сов. радио, 1974, с.54 -55.
Операцию оценки времени задержки можно значительно упростить, установив такое ее постоянное значение для заданной формы сигнала, при котором существенный вклад в результирующую достоверность обнаружения начинает вносить второй канал обработки.
Действительно, до тех пор, пока временное перекрытие информационного и мешающего сигналов незначительно, то какое бы положение не занимала опорная точка, основной вклад в результирующую достоверность обнаружения будет вносить первый безотносительный канал обработки сигнала. А второй канал обработки по эффективности обнаружения преобладает над первым каналом только при значительных временных перекрытиях информационного и мешающего сигналов. Исходя из этого, можно определить некоторый интервал существенных перекрытий сигналов и опорную точку выбрать постоянной и равной середине этого интервала. Причем частичное несоответствие выбранного положения опорной точки ее истинному положению не будет приводить к сколь-либо заметным потерям, поскольку, как показано выше, при значительных перекрытиях ложбина в окрестности опорной точки является достаточно широкой.
Таким образом, режим обнаружения с фиксированным положением опорной точки автоматически включается в работу только при сложной обстановке, когда имеет место значительное временное перекрытие информационного и мешающего сигналов, и тем самым защищает систему от частых ошибок обнаружения.
Платой за эту упрощенную операцию оценки времени задержки между информационным и мешающим сигналами будет являться частичное снижение достоверности обнаружения сигнала при изменении задержки в широком априорном интервале.
Вычислительные операции в данном способе, такие как вычисление момента времени опорного отсчета τo, вычисление коэффициента корреляции напряжения шума r(τo) и вычисление текущего значения порога П(τo), которые соответственно представлены выражениями (16), (18) и (1), являются элементарными в технической реализации и могут быть реализованы в едином специально запрограммированном вычислителе.
Таким образом, предложенный способ обнаружения сигналов не имеет принципиальных ограничений в технической реализации и может быть реализован с применением известных функциональных устройств.
Изобретение относится к технике приема и обнаружения импульсных радиосигналов при наличии сигналов мешающих отражений (интерференционных замираний) и белого шума и может быть использовано в системах передачи дискретной информации и в радиолокации. Технический результат изобретения заключается в повышении помехоустойчивости обнаружения импульсного радиосигнала на фоне мешающего радиоимпульса и белого шума при неизменных энергетических и частотно-временных ресурсах канала связи. Для этого в известном способе обнаружения сигнала, включающем согласованную фильтрацию с последующим пороговым принятием решения о наличии или отсутствии сигнала по заданному критерию, формируют дополнительный канал обнаружения, в котором осуществляют оценку времени задержки между информационным и мешающим сигналами, на основе чего определяют момент времени τ0 взятия опорного отсчета, в котором измеряют значение шума Uш(τ0) на выходе согласованного фильтра и вычисляют его коэффициент корреляции r(τ0) по которому при известной мощности выходного шума Рш и заданной вероятности ложной тревоги Рf, вычисляют значение порога принятия решения по формуле
который устанавливают в управляемом пороговом устройстве, где ф-1• - функция, обратная интегралу вероятности. При этом итоговое решение о наличии или отсутствии сигнала принимают по правилу: сигнал обнаруживается, если хотя бы в одном из частных каналов обнаружения он регистрируется. 2 ил.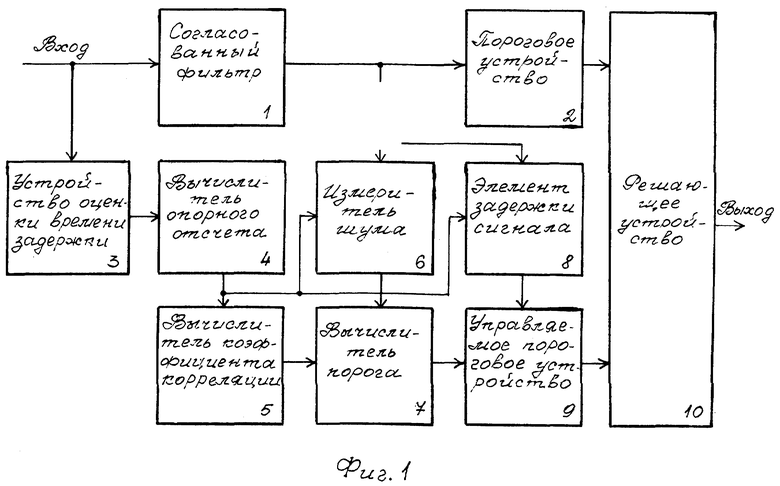
Способ обнаружения импульсного радиосигнала на фоне мешающего радиоимпульса и белого шума, включающий согласованную фильтрацию сигнала с последующим пороговым принятием решения о его наличии или отсутствии по выбранному критерию, отличающийся тем, что формируют дополнительный канал обнаружения, в котором осуществляют оценку постоянной составляющей времени задержки между информационным и мешающим сигналами, на основе чего определяют момент времени τ0 взятия опорного отсчета, в котором измеряют мгновенное значение шума Uш(τ0) на выходе согласованного фильтра и вычисляют его коэффициент корреляции r(τ0) между опорным и информационным отсчетами, по которому при известной мощности выходного шума Pш согласованного фильтра и заданной вероятности ложной тревоги PF вычисляют значение порога принятия решения по формуле
который устанавливают в управляемом пороговом устройстве дополнительного канала обнаружения, где ф-1(•) - функция, обратная интегралу вероятности, при этом результирующее решение о наличии или отсутствии сигнала принимают на основе соответствующих частных решений по основному и дополнительному каналам обнаружения по правилу: сигнал обнаруживается, если хотя бы в одном из частных каналов обнаружения он регистрируется.
| ФИНК О.М | |||
| Теория передачи дискретных сообщений | |||
| - М.: Сов.радио, 1970, с.157, 158 | |||
| СПОСОБ ОБНАРУЖЕНИЯ ИМПУЛЬСНЫХ РАДИОСИГНАЛОВ НА ФОНЕ УЗКОПОЛОСНЫХ ПОМЕХ | 1996 |
|
RU2112249C1 |
| US 3866223 A, 11.02.1975 | |||
| US 4804962 A, 14.02.1989 | |||
| US 4956792 A, 11.09.1990. | |||
