Изобретение относится к технике приема (распознавания) импульсных радиосигналов при наличии сигналов мешающих отражений и белого шума и может быть использовано в аппаратуре приема дискретной информации различного назначения.
Актуальность данной проблемы обусловлена случайной структурой реальных радиоканалов, в которых в точку приема, кроме основного сигнала, приходят дополнительные мешающие сигналы, порожденные основным сигналом с перекрытием с ним во времени. Это обстоятельство приводит к интенсивным замираниям информационных сигналов и искажению их формы, существенно снижающих помехоустойчивость приема дискретной информации (Финк Л.М. Теория передачи дискретных сообщений. М.: Сов. радио, 1970, с. 328-339).
Для повышения помехоустойчивости приема информации в данных условиях помеховой обстановки существуют различные способы.
В частности, известен способ приема (распознавания) импульсных радиосигналов на фоне мешающих радиоимпульсов, обусловленных многолучевым распространением радиоволн, и белого шума, в основу которого положено использование испытательного импульса, по реакции канала на который в приемнике регулируется линейный четырехполюсник с целью компенсации мешающих радиоимпульсов (Финк Л.М. Теория передачи дискретных сообщений. М.: Сов. радио, 1970, с. 487-488).
К недостаткам данного способа относится сложность его технической реализации и что он практически неприменим для каналов с быстрыми замираниями, при которых импульсная функция канала может существенно измениться между соседними посылками испытательных импульсов, что приведет к неверной регулировке параметров компенсирующего четырехполюсника и, следовательно, к невозможности эффективной компенсации мешающих радиосигналов. Кроме того, даже при медленных замираниях этот способ работает только при относительно низком уровне аддитивных помех в канале, так как при большом их уровне будет необратимо искажена импульсная функция канала, с последствиями, аналогичными при быстрых замираниях. Дополнительно к этому, наличие постоянно действующих испытательных импульсов снижает общую пропускную способность канала связи.
Другим известным способом распознавания сигналов при наличии сигналов мешающих отражений является так называемый метод защитного промежутка, сущность которого заключатся в том, что при известной длительности реакции канала L и длительности сигнала Т на решающую схему приемника подаются только отрезки сигнала длительностью T-L, на которых не происходит перекрытия во времени соседних элементов (Финк Л.М. Теория передачи дискретных сообщений. М.: Сов. радио, 1970, с.463).
Недостатком данного способа является уменьшение энергии информационных сигналов за счет исключения перекрытых во времени отрезков сигнала, что в конечном итоге на фоне белого шума приводит к пропорциональному снижению помехоустойчивости приема информации.
Среди известных способов повышения достоверности приема информации в условиях замираний применяют разнесенный прием в различных его вариантах (Финк Л.М. Теория передачи дискретных сообщений. М.: Сов. радио, 1970, с.398-400). В частности, в каналах с замираниями сигналов широко используется прием на пространственно-разнесенные антенны с последующей комплексной обработкой сигнально-помеховых реализаций, полученных в отдельных ветвях разнесения.
Недостатком данного способа является невозможность его использования на малогабаритных подвижных объектах, а также значительные технико-экономические затраты, требующиеся на его реализацию.
Достаточно универсальным известным способом повышения достоверности передаваемой информации в условиях временных и частотно-селективных замираний сигналов является способ разнесения элементов сигнала по времени или (и) по частоте.
Сущность разнесения по времени заключается в том, что каждый элемент сигнала при передаче дублируется несколько раз с интервалом времени, превышающим время корреляции замираний. При частотном разнесении передаваемый элемент сигнала дублируется на разных частотах с интервалом их смещения, превышающим интервал корреляции замираний по частоте (Финк Л.М. Теория передачи дискретных сообщений. М.: Сов. радио, 1970, с.398-399).
Недостатки этих способов очевидны: при разнесении по времени замедляется скорость передачи информации, а при частотном разнесении увеличивается занимаемая полоса частот каналом связи при неизменной скорости передачи информации.
Наиболее близким к предлагаемому является способ распознавания (приема) импульсных радиосигналов, в котором распознаваемые сигналы фильтруют в объединенных по входам согласованных фильтрах, каждый из которых согласован с одним из распознаваемых сигналов с последующим принятием решения о передаваемом сигнале по выбранному критерию (Тихонов В.И. Оптимальный прием сигналов. М.: Радио и связь, 1982, с.117). Недостатком данного способа является существенное изменение по случайному закону мощностей информационных сигналов, по которым принимается решение и, как следствие этого, - снижение помехоустойчивости приема информации на фоне белого шума. Причем, чем больше временное перекрытие радиосигналов, тем хуже будут характеристики помехоустойчивости.
Технический результат изобретения заключается в повышении помехоустойчивости приема (распознавания) импульсных радиосигналов на фоне мешающих радиоимпульсов и белого шума при неизменных энергетических и частотно-временных ресурсах канала связи.
Данный технический результат достигается за счет использования при обработке сигналов существенных отличий в формах результирующих (искаженных) выходных сигналов согласованных фильтров и корреляционных функций их выходных шумов. Учет данных отличий реализуется путем использования дополнительной информации о шумах, полученных в опорных отсчетах, определяемых точками пересечения огибающих информационных и мешающих сигналов на выходах соответствующих фильтров. В результате итоговое решение о распознавании сигналов по выбранному критерию принимают на основе частных решений обнаружения соответствующих сигналов по комбинации их наличия или отсутствия на выходах пороговых устройств основных и дополнительных каналов обработки.
Для чего совместно с известным способом распознавания импульсных сигналов, в котором распознаваемые сигналы фильтруют в объединенных по входам согласованных фильтрах, каждый из которых согласован с одним из распознаваемых сигналов, а каждый из отфильтрованных сигналов сравнивают с постоянным пороговым уровнем в соответствующем основном канале обработки и с управляемым пороговым уровнем в соответствующем дополнительном канале обработки.
Управляемый пороговый уровень формируют путем текущего измерения сигнальной составляющей и шума на выходе соответствующего согласованного фильтра в момент опорного отсчета, определяемого точкой пересечения огибающих информационного и мешающего сигналов и вычисления коэффициента корреляции шума между моментами опорного и информационного отсчетов.
Управляемый пороговый уровень, который устанавливают в дополнительных каналах обработки, вычисляют по формуле:

а постоянный пороговый уровень, который устанавливают в основных каналах обработки, вычисляют по формуле:

где Рш,n - мощности выходных шумов согласованных фильтров; PF - заданная вероятность ложной тревоги по основным и дополнительным каналам обработки; τ0,n - моменты времени опорных отсчетов; uсш,n - суммарная составляющая сигнала и шума в моменты опорных отсчетов; rn(τ0,n) - коэффициенты корреляции шума на выходах согласованных фильтров между опорными и информационными отсчетами; Ф-1(·) - функция, обратная интегралу вероятности;  ; m - число распознаваемых сигналов.
; m - число распознаваемых сигналов.
По комбинации наличия или отсутствия сигналов, полученных в результате сравнения с пороговыми уровнями, формируют решение о распознавании соответствующего сигнала по правилу: в канале присутствует n-й сигнал, если он регистрируется хотя бы на одном из выходов соответствующего основного или дополнительного канала обработки при отсутствии сигналов на выходах других основных и дополнительных каналов, либо при наличии сигналов на выходах других основных или дополнительных каналов, он регистрируется одновременно на выходах соответствующего основного и дополнительного каналов, либо при наличии сигналов на выходах других только дополнительных каналов, он регистрируется на выходе соответствующего основного канала.
Таким образом, данный способ распознавания радиосигналов в отличие от существующих аналогов не требует разнесения сигналов по времени и (или) по частоте, а позволяет при неизменных частотно-временных ресурсах канала связи повысить помехоустойчивость распознавания сигналов.
Наличие двух каналов обработки на каждый информационный сигнал взаимно дополняют друг друга по эффективности. Если в одном канале условия регистрации сигнала ухудшаются, то во втором, сопряженном с ним канале в тот же момент времени условия регистрации улучшаются и в результате показатели итоговой регистрации, присутствующего в канале сигнала, практически не ухудшаются.
При незначительном временном перекрытии радиосигналов точка опорного отсчета будет удалена от информационной точки и, следовательно, корреляционная связь помехи между этими точками также станет меньше и в пределе при rn(τ0,n)→0 дополнительный канал обработки становится неэффективным. Распознавание сигналов в этом случае будет осуществляться известным способом с помощью согласованных фильтров с последующим принятием решения о передаваемом информационном сигнале на фоне белого шума.
С увеличением временного перекрытия радиосигналов опорная точка будет приближаться к информационной, что приведет к увеличению коэффициента корреляции шума между этими точками и, следовательно, начнет «работать» управляемый порог в соответствии с выражением (1), уменьшая эквивалентную (условную) мощность шума в момент информационного отсчета. В результате повышается эффективность дополнительного канала обработки, обеспечивая, тем самым, совместно с основным каналом устойчивую регистрацию соответствующего информационного сигнала.
Так как в любой момент времени в канале связи присутствует только один информационный сигнал, согласованный со своим фильтром, то в других каналах обработки, как в основных, так и дополнительных в это время будет присутствовать только шум.
Таким образом, данный комбинированный способ распознавания сигналов обладает той отличительной особенностью, что он практически нейтрализует мешающие сигналы, даже при значительном их временном перекрытии с сигналами информационными.
Представим доказательство наличия указанного технического результата в предлагаемом способе для частного случая когерентного распознавания двух импульсных радиосигналов.
Пусть распознаваемые выходные информационные радиосигналы первого и второго согласованных фильтров имеют вид

где U1,2(t), ω1,2 T1,2 - соответственно огибающие радиосигналов, их частоты и длительности, которые принимаются одинаковыми (T1,2=Т).
Поскольку каналы распознавания сигналов идентичны, то будем рассматривать прохождение только одного, например, первого сигнала. При этом во втором канале будет действовать только шум.
Мешающий радиосигнал на выходе первого согласованного фильтра, смещенный по времени относительно информационного сигнала, будет равен

где V1(t), t01, ±Δt1 - соответственно огибающая мешающего радиосигнала, постоянная составляющая времени задержки и случайный временной сдвиг, обусловливающий случайность фазы при его взаимодействии с информационным сигналом.
В момент отсчета при t=0 амплитуда результирующего сигнала, определяемого суммой сигналов (3) и (4), по которой принимается решение, будет равна

где χ1=l-t01/T - относительное перекрытие информационного и мешающего сигналов; φ01=ω01t01 - постоянная начальная фаза;
 - случайная фаза, изменяющаяся по равновероятному закону в интервале [-π,π].
- случайная фаза, изменяющаяся по равновероятному закону в интервале [-π,π].
С учетом (5) вероятность правильной регистрации сигнала в первом (основном) канале обработки при заданной вероятности ложной тревоги и когерентном приеме будет равна

Для нахождения вероятности правильной регистрации сигнала во втором (дополнительном) канале обработки необходимо определить момент опорного отсчета τ01 из условия равенства огибающих информационного и мешающего радиосигналов:

В общем случае решение уравнения (7) будет иметь вид

где F(·) - некоторая функция, зависящая от формы сигналов; α1, …, αk и β1, …, βl - параметры, характеризующие форму информационного и мешающего сигналов соответственно.
Рабочее значение τ01 определяется с точностью до ближайшего целого числа периодов изменения коэффициента корреляции шума на выходе согласованного фильтра, который определяется выражением:
Поскольку до точки τ01 укладывается целое число периодов коэффициента корреляции шума, то, следовательно, его значение в данной точке будет максимальным и равным
При этом условная мощность выходного шума согласованного фильтра в момент информационного отсчета относительно опорного будет равна (Вентцель Е.С. Теория вероятностей. М.: Наука, 1969, с. 191-192)

Из (11) следует, что, чем меньше интервал времени τ01 между информационным и опорным отсчетами, тем больше коэффициент корреляции шума r1(τ01), тем меньше условная мощность шума Рш1 усл при принятии решения и, следовательно, выше будет достоверность регистрации сигнала во втором канале обработки по сравнению с первым.
Условная амплитуда сигнала в момент принятия решения относительно этого же опорного отсчета определяется выражением:

где U1рез(0, 1) определяется выражением (5), a U1рез(τ01,ψ1) - результирующая амплитуда информационного и мешающего сигналов в опорном отсчете, которая определяется, аналогично (5), с учетом того, что
1) определяется выражением (5), a U1рез(τ01,ψ1) - результирующая амплитуда информационного и мешающего сигналов в опорном отсчете, которая определяется, аналогично (5), с учетом того, что  и фазовые соотношения здесь сохраняются такими же, как в (5).
и фазовые соотношения здесь сохраняются такими же, как в (5).
В результате, опуская промежуточные преобразования, получим

С учетом (5), (11) и (13) вероятность правильной регистрации сигнала во втором (дополнительном) канале обработки при заданной вероятности ложной тревоги будет определяться следующим выражением:
При распознавании двоичных сигналов предлагаемым способом решающее устройство имеет четыре входа (по два входа на каждый информационный сигнал). Если обозначить через (b) и (с) выходы основных каналов обработки, а через (а) и (d) выходы дополнительных каналов обработки, то при передаче сигнала u1(t) ошибка в его приеме будет иметь место при следующих исходах.
Первый исход: на входах (а) и (b) решающего устройства сигналы отсутствуют. При этом ошибка будет в том случае, когда на входах (с) и (d) сигналы также отсутствуют. Такая неопределенность принимается за ошибку, так как в этом случае декодер системы с равной вероятностью на данной временной позиции регистрирует либо сигнал u1(t), либо u2(t). Явная ошибка при этом исходе будет иметь место, если на входе (с) сигнал присутствует, а на входе (d) - отсутствует, либо на входе (с) сигнал отсутствует, а на входе (d) - присутствует, либо сигнал одновременно присутствует на входах (с) и (d).
Если обозначить через Р1Д÷P4Д; P1F÷P4F - частные вероятности правильного обнаружения и ложной тревоги по входам (а), (b), (с) и (d), то при τ01=τ02=τ0 и r1(τ01)=r2(τ02)=r(τ0), вероятности правильного обнаружения сигнала по основным и дополнительным каналам обработки будут соответственно равны: P1Д=P3Д; P2Д=P4Д. Если при этом частные вероятности ложной тревоги в каналах обработки равны:
P1F=…=P4F=PF, то частная вероятность ошибки в приеме сигнала u1(t) будет определяться выражением:

Второй исход: на входе (а) сигнал присутствует, а на входе (b) отсутствует. При этом ошибка возникает, когда на входе (с) сигнал присутствует, а на входе (d) отсутствует. Данная неопределенность также принимается за ошибку и декодер с равной вероятностью регистрирует либо сигнал u1(t), либо u2(t). Явная ошибка будет иметь место при одновременном наличии сигналов на входах (с) и (d). Наличие сигнала на входе (d) при его отсутствии на входе (с) не будет являться ошибкой, так как при прочих равных условиях приоритет отдается наличию сигнала в основном канале обработки. В результате частная вероятность ошибки в данном исходе будет равна

Третий исход: на входе (а) сигнал отсутствует, а на входе (b) присутствует. При этом ошибка будет в том случае, когда на входе (с) сигнал присутствует, а на входе (d) отсутствует (приоритетная ситуация), либо на входе (с) сигнал отсутствует, а на входе (d) присутствует (неопределенность), либо сигнал присутствует одновременно на входах (с) и (d). В этом случае частная вероятность ошибки будет равна

Четвертый исход: на входах (а) и (b) сигнал присутствует. При этом исходе ошибка в виде неопределенности имеет место в единственном случае одновременного присутствия сигналов на входах (с) и (d), которая будет равна

Результирующая ошибка в приеме сигнала u1(t) будет равна сумме частных вероятностей ошибок по всем исходам и зависеть от случайной фазы мешающего сигнала:
Для получения средней вероятности ошибки необходимо выражение (19) усреднить по всем возможным изменениям фазы ψ1:
Интеграл (20) не выражается ни в элементарных, ни в известных специальных функциях, поэтому он решался численным методом.
В известном способе когерентного распознавания двоичных радиосигналов, использующем согласованную фильтрацию каждого из них с последующим принятием решения о передаваемом информационном символе, вероятность ошибки определяется выражением (Тихонов В.И. Оптимальный прием сигналов. М.: Радио и связь, 1983, с.106):

где h2(ψ1), rS и Ф(·) - соответственно отношение сигнал-шум по мощности на выходе согласованного фильтра; коэффициент взаимной корреляции между распознаваемыми сигналами и интеграл вероятности.
В данном способе отношение сигнал-шум, определяющее вероятность ошибки распознавания сигналов, будет равно

Из (22) следует, что при значительном временном перекрытии информационного и мешающего сигналов, вследствие случайной фазы ψ1 величина h2(ψ1) будет иметь большую дисперсию, что приведет к существенному снижению достоверности приема информации.
При отсутствии мешающего сигнала отношение сигнал-шум будет определяться известной предельной величиной, равной  , где Е - энергия сигналов, a N0 - спектральная плотность мощности белого шума.
, где Е - энергия сигналов, a N0 - спектральная плотность мощности белого шума.
На фиг.1 представлены характеристики зависимости средней вероятности ошибки распознавания двоичных ортогональных сигналов от отношения сигнал-шум в способе-прототипе и в предлагаемом способе, а на фиг.2 представлена структурная электрическая схема устройства, реализующая предлагаемый способ распознавания сигналов.
Характеристики на фиг.1 рассчитаны в соответствии с выражениями (20) и (21) с учетом (6), (14) и (19) для гауссовских радиосигналов:

где α - параметр, определяющий длительность сигналов.
При этом полагалось, что мешающие сигналы имеют такие же параметры, как и информационные с коэффициентом перекрытия χ=0,7, а вероятности ложной тревоги по основным и дополнительным каналам обработки приняты одинаковыми и равными РF=10-3.
Характеристика 1 отображает помехоустойчивость известного способа (прототипа) распознавания сигналов при наличии мешающих сигналов, которая рассчитана по выражению (21) с отношением сигнал-шум  , а флюктуирующая амплитуда U1рез (0,ψ1) результирующего сигнала, по которой принимается решение, определяемое выражением (5).
, а флюктуирующая амплитуда U1рез (0,ψ1) результирующего сигнала, по которой принимается решение, определяемое выражением (5).
Характеристика 2 отображает помехоустойчивость известного способа распознавания только на фоне белого шума, при отсутствии мешающего сигнала, которая рассчитана по выражению (21) и характеризует потенциальную помехоустойчивость, определяемую энергией сигналов Е и спектральной плотностью мощности белого шума N0.
Характеристика 3, рассчитанная по выражению (20) с учетом (6), (14) и (19), характеризует помехоустойчивость предложенного способа распознавания при наличии мешающих сигналов.
Анализ результатов, представленных на фиг.1, свидетельствует, что в известном способе распознавания наличие мешающих сигналов (характеристика 1) приводит к существенному снижению помехоустойчивости по сравнению со случаем отсутствия мешающих сигналов (характеристика 2).
Так, например, при h2=30 и отсутствии мешающих сигналов вероятность ошибки распознавания в известном способе составляет  , тогда как при наличии мешающих сигналов ошибка увеличивается до значения
, тогда как при наличии мешающих сигналов ошибка увеличивается до значения  .
.
Использование предлагаемого способа распознавания (характеристика 3) значительно ослабляет действие мешающих сигналов. Причем степень этого ослабления при различных значениях h2 разное. При малых h2≈l0÷15 наблюдается меньшее ослабление мешающих сигналов, чем при больших h2≈25÷40. Так, при h2=15 вероятность ошибки по сравнению с ошибкой в известном способе уменьшается в 2-3 раза, тогда как при h2=30 выигрыш в вероятности ошибки в предлагаемом способе по сравнению с известным составляет 30÷40 раз.
Таким образом, выигрыш в помехоустойчивости приема (распознавания) сигналов в предлагаемом способе по сравнению с прототипом в условиях мешающих сигналов на фоне белого шума свидетельствует о наличии причинно-следственной связи между совокупностью существенных признаков и достигаемым техническим результатом.
Структурная схема устройства (фиг.2), реализующая предлагаемый способ распознавания двоичных сигналов, содержит фильтры 4, 5, согласованные с распознаваемыми сигналами, устройство 6 оценки моментов времени опорных отсчетов τ01 и τ02, вычислители 7 и 8 коэффициентов корреляции шума r1(τ01,2) и r2(τ01,2) на выходах фильтров в точке опорного отсчета, измерители 9 и 10 сигнально-помеховых реализаций uсш1(τ01,2) и uсш2(τ01,2) на выходах фильтров в точке опорного отсчета, вычислители 11 и 12 пороговых уровней П1 (τ01,2) и П2(τ01,2) в дополнительных каналах обработки, управляемые элементы задержки сигнала 13, 14 и 20 на время τ01,2, постоянные пороговые устройства 15 и 16, управляемые пороговые устройства 17 и 18, генератор 19 тактовых импульсов и объединяющее решающее устройство 21.
Таким образом, схема распознавания содержит два симметричных канала обработки сигналов, каждый из которых имеет по два выхода (а, b) и (с, d) на объединяющее решающее устройство. Выходы (b) и (с) являются основными, которые реализованы по известной схеме порогового обнаружения сигналов, а выходы (а) и (d) являются дополнительными и реализованы схемами обработки сигналов с использованием дополнительной информации о сигнально-помеховых реализациях, полученной в опорных отсчетах.
Устройство работает следующим образом.
Импульсный информационный радиосигнал, например, u1(t) совместно с мешающим радиосигналом и белым шумом поступает на объединенные входы согласованных фильтров 4 и 5. Поскольку сигнал u1(t) согласован только с фильтром 4, то на его выходе будет иметь место результирующий сигнал совместно с шумом, а на выходе согласованного фильтра 5 будет иметь место только шум. По выходным сигнально-помеховым реализациям согласованных фильтров в устройстве 6 осуществляется оценка момента времени опорного отсчета τ01, которая поступает на вычислители 7 и 8 коэффициентов корреляции r1(τ01) и r2(τ01) выходных шумов согласованных фильтров, которые вычисляют в соответствии с выражением (10) и округлением их до ближайшего максимального значения.
Как правило, формы амплитудно-частотных характеристик согласованных фильтров в каналах обработки являются одинаковыми и, следовательно, с учетом округления коэффициентов корреляции до ближайших их максимальных значений, можно записать r1(τ01,2)≈r2(τ01,2).
Одновременно сигнал момента опорного отсчета τ01 с выхода устройства 6 поступает на первые (разрешающие) входы измерителей 9 и 10 сигнально-помеховых реализаций в опорном отсчете и на первые (управляющие) входы управляемых элементов задержки 13, 14 и 20, при этом на вторые информационные входы измерителя 9 и элемента задержки 13 поступает смесь сигнала с шумом с выхода согласованного фильтра 4, а на информационные входы измерителя 10 и элемента задержки 14 поступает только шум с выхода согласованного фильтра 5. Элементы задержки не являются существенными признаками и необходимы лишь для того, чтобы обеспечить «синфазность» (одновременность) поступления на решающее устройство 21 сигналов основных и дополнительных каналов обработки.
С выходов измерителей 9 и 10 сигнально-помеховые реализации uсш1(τ01) и uсш2(τ01) поступают на первые входы соответствующих вычислителей 11 и 12 пороговых уровней П1(τ01) и П2(τ01), на вторые входы которых поступают значения коэффициентов корреляции r1(τ01) и r2(τ01) c выходов соответствующих вычислителей 7 и 8. При этом значения управляемых порогов П1(τ01) и П2(τ01) определяют в соответствии с выражением (1).
С выходов вычислителей 11 и 12 значения пороговых уровней поступают на первые (управляющие) входы соответствующих управляемых пороговых устройств 17 и 18, на вторые (информационные) входы которых поступает смесь сигнала с шумом с выхода согласованного фильтра 4 через элемент задержки 13 и один шум с выхода согласованного фильтра 5 через элемент задержки 14. Одновременно сигнал с шумом с выхода согласованного фильтра 4 и шум с выхода согласованного фильтра 5 поступают на соответствующие постоянные пороговые устройства 15 и 16, значение порогов которых определяют в соответствии с выражением (2). Генератор 19 тактовых импульсов совместно с управляемым элементом задержки 20 обеспечивают отсчет принимаемых информационных символов.
Сигналы с выходов управляемых пороговых устройств 17 и 18 и постоянных пороговых устройств 15 и 16 поступают на объединяющее решающее устройство 21, формирующее решение о регистрации соответствующего информационного символа по комбинации наличия и отсутствия сигналов на выходах пороговых устройств. При этом ошибка при распознавании сигналов будет иметь место, если при передаче сигнала u1(t) регистрируется сигнал u2(t) и наоборот.
Из описания следует, что в состав устройства реализации данного способа распознавания сигналов входят следующие блоки: согласованные фильтры 4, 5; измерители 9, 10 сигнально-помеховых реализаций; управляемые элементы задержки 13, 14, 20; постоянные пороговые устройства 15, 16; управляемые пороговые устройства 17, 18; генератор тактовых импульсов 19; решающее устройство 21, которые подробно описаны с конструктивными признаками их технической реализации в книге под редакцией Пестрякова В.Б. Шумоподобные сигналы в системах передачи информации. М.: Сов. радио, 1973.
Техническое решение устройства 6 оценки момента времени опорного отсчета может быть выполнено на основе линейного фильтра с радиочастотным дифференцирующим контуром, выделяющим фронты информационного и мешающего сигналов, по положению которых сначала определяют время задержки между информационным и мешающим сигналами t01, а затем искомую величину - момент времени опорного отсчета τ0l=t01/2. Радиочастотный дифференцирующий контур, с помощью которого формируют исходный информативный параметр - время задержки t01, описан в книге Ширмана Я.Д. Разрешение и сжатие сигналов. М.: Сов. радио, 1974, с.54-55.
Однако при значительном временном перекрытии сигналов провал в окрестности точки пересечения их огибающих расширяется, что позволяет значительно упростить операцию оценки точки опорного отсчета, установив такое постоянное ее значение, при котором существенный вклад в результирующую достоверность распознавания сигналов будет вносить второй дополнительный канал обработки.
При этом до тех пор, пока перекрытие сигналов незначительное, то какое бы положение ни занимала опорная точка, основной вклад в результирующую достоверность распознавания будут вносить первые (основные) каналы обработки. Вторые (дополнительные) каналы обработки будут по эффективности преобладать над первыми только при значительных перекрытиях сигналов. Исходя из этого, можно определить некоторый интервал существенных перекрытий сигналов и опорную точку выбрать постоянной и равной середине этого интервала.
Таким образом, режим распознавания с фиксированным положением опорной точки автоматически включается в работу только при сложной обстановке, когда имеет место значительное временное перекрытие сигналов и тем самым защищает систему от частых ошибок распознавания.
Платой за эту упрощенную операцию оценки момента времени опорного отсчета будет являться частичное снижение достоверности распознавания сигналов при изменении задержки между информационным и мешающим сигналами в широком априорном интервале.
Вычислительные операции в данном способе распознавания сигналов, такие как вычисление коэффициентов корреляции шума r1,2(τ01,2), в соответствии с выражением (10), реализуемые блоками 7 и 8, и вычисление значений управляемых порогов П1,2(τ01,2), в соответствии с выражением (1), реализуемые блоками 11 и 12, являются элементарными в техническом исполнении и могут быть реализованы в едином специально запрограммированном вычислителе.
Таким образом, предложенный способ распознавания сигналов не имеет принципиальных ограничений при практическом исполнении и может быть реализован с применением известных функциональных устройств.

Изобретение относится к технике распознавания импульсных радиосигналов и может быть использовано в аппаратуре приема дискретной информации. Технический результат - повышение помехоустойчивости распознавания импульсных радиосигналов на фоне мешающих радиоимпульсов и белого шума при неизменных энергетических и частотно-временных ресурсах канала связи. В способе распознавания распознаваемые сигналы фильтруют в объединенных по входам согласованных фильтрах, каждый из которых согласован с одним из распознаваемых сигналов, каждый из отфильтрованных сигналов сравнивают с постоянным пороговым уровнем в соответствующем основном канале обработки и с управляемым пороговым уровнем в соответствующем дополнительном канале обработки, причем управляемый пороговый уровень вычисляют с учетом текущего измерения сигнальной составляющей и шума на выходе соответствующего n-го согласованного фильтра в момент опорного отсчета, определяемого точкой пересечения огибающих информационного и мешающего сигналов, вычисленного коэффициента корреляции шума, известной мощности выходных шумов согласованных фильтров и заданной вероятности ложной тревоги. По комбинации наличия и отсутствия сигналов на выходах пороговых устройств формируют решение о регистрации информационного символа. 2 ил.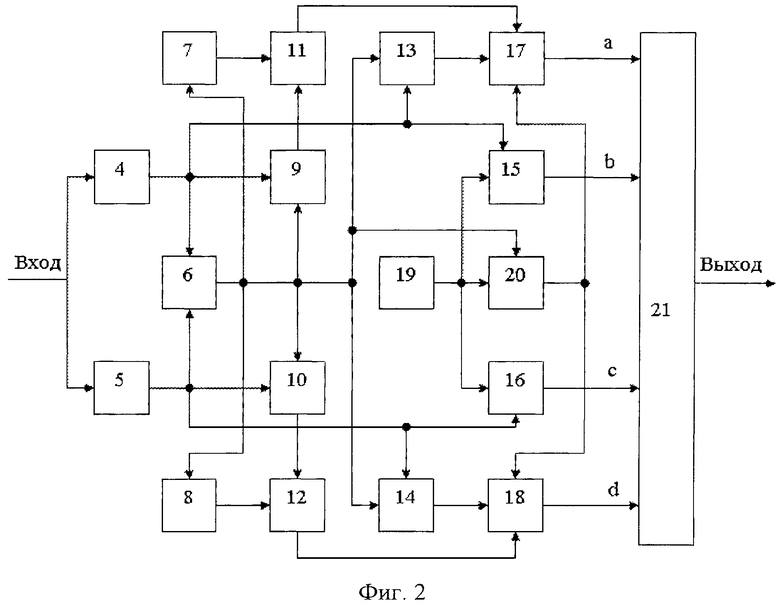
Способ распознавания импульсных радиосигналов в условиях мешающих радиоимпульсов на фоне белого шума, в котором распознаваемые сигналы фильтруют в объединенных по входам согласованных фильтрах, каждый из которых согласован с одним из распознаваемых сигналов, отличающийся тем, что каждый из отфильтрованных сигналов сравнивают с постоянным пороговым уровнем в соответствующем основном канале обработки и с управляемым пороговым уровнем в соответствующем дополнительном канале обработки, причем управляемый пороговый уровень вычисляют с учетом текущего измерения сигнальной составляющей и шума uсш,n(τ0,n), на выходе соответствующего n-го согласованного фильтра в момент опорного отсчета τ0,n, определяемого точкой пересечения огибающих информационного и мешающего сигналов, вычисленного коэффициента корреляции шума rn(τ0,n), известной мощности выходных шумов согласованных фильтров Pш,n
и заданной вероятности ложной тревоги PF
по формуле

где  m - число распознаваемых сигналов, Ф-1(·) - функция, обратная интегралу вероятности, и по комбинации наличия или отсутствия сигналов, полученных в результате сравнения с пороговыми уровнями, формируют решение о распознавании соответствующего сигнала по правилу: в канале присутствует n-й сигнал, если он регистрируется хотя бы на одном из выходов соответствующего основного или дополнительного каналов обработки при отсутствии сигналов на выходах других основных и дополнительных каналов, либо при наличии сигналов на выходах других основных или дополнительных каналов, он регистрируется одновременно на выходах соответствующих основного и дополнительного каналов, либо при наличии сигналов на выходах других только дополнительных каналов он регистрируется на выходе соответствующего основного канала.
m - число распознаваемых сигналов, Ф-1(·) - функция, обратная интегралу вероятности, и по комбинации наличия или отсутствия сигналов, полученных в результате сравнения с пороговыми уровнями, формируют решение о распознавании соответствующего сигнала по правилу: в канале присутствует n-й сигнал, если он регистрируется хотя бы на одном из выходов соответствующего основного или дополнительного каналов обработки при отсутствии сигналов на выходах других основных и дополнительных каналов, либо при наличии сигналов на выходах других основных или дополнительных каналов, он регистрируется одновременно на выходах соответствующих основного и дополнительного каналов, либо при наличии сигналов на выходах других только дополнительных каналов он регистрируется на выходе соответствующего основного канала.
| СПОСОБ ОБНАРУЖЕНИЯ ИМПУЛЬСНОГО РАДИОСИГНАЛА НА ФОНЕ МЕШАЮЩЕГО РАДИОИМПУЛЬСА И БЕЛОГО ШУМА | 1999 |
|
RU2160905C1 |
| СПОСОБ НЕКОГЕРЕНТНОГО ОБНАРУЖЕНИЯ ИМПУЛЬСНОГО РАДИОСИГНАЛА НА ФОНЕ МЕШАЮЩЕГО РАДИОИМПУЛЬСА И БЕЛОГО ШУМА | 2002 |
|
RU2285274C2 |
| RU 2009108882 А1, 20.09.2010 | |||
| СПОСОБ РАЗРЕШЕНИЯ ЦЕЛЕЙ ПО ДАЛЬНОСТИ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ И ИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СО СЖАТИЕМ ИМПУЛЬСОВ И ВОССТАНОВЛЕНИЕМ СИГНАЛОВ | 2004 |
|
RU2296345C2 |
| US 4956792 А, 11.09.1990 | |||
| WO 2008066537 А1, 05.06.2008 | |||
| ФИНК Л.М | |||
| Теория передачи дискретных сообщений | |||
| - М.: Советское радио, 1970, с.157, 158. | |||

