Изобретение относится к электротехнике и может быть использовано в асинхронных электроприводах механизмов, к которым предъявляются требования регулирования скорости в широком диапазоне.
Известен способ регулирования скорости асинхронного двигателя, подключенного через три трехфазных мостовых реверсивных преобразователя к питающей сети, при котором изменяют частоту питающего напряжения, подаваемого на статорную обмотку двигателя, путем подачи импульсов управляющего напряжения на тиристоры трех реверсивных преобразователей. При этом импульсы управляющего напряжения подают раздельно на тиристоры выпрямительного моста, либо на тиристоры инверторного моста каждого реверсивного преобразователя (см., например, В.М. Терехов. Элементы автоматизированного электропривода. - М.: Энергоатомиздат, 1987, с. 94-97).
Недостатком известного способа является невозможность работы двигателя и регулирования его скорости при частоте вращения ω > 0,5ωн, где ωн - номинальная частота вращения двигателя, из-за необходимости создания бестоковой паузы, длительность которой должна быть не меньше времени спадания до нуля тока вентилей, проводивших ток в момент прекращения подачи импульсов управляющего напряжения на работающую группу вентилей, с учетом времени восстановления запирающих свойств вентилей. Максимальная частота питающего напряжения, реализуемая при данном способе регулирования, примерно в два раза меньше частоты питающей сети.
Наиболее близким аналогом к заявляемому способу является способ регулирования скорости асинхронного двигателя, подключенного через три трехфазных мостовых реверсивных преобразователя к питающей сети, при котором изменяют частоту питающего напряжения, подаваемого на статорную обмотку двигателя, путем подачи импульсов управляющего напряжения на тиристоры трех реверсивных преобразователей. Причем подачу импульсов управляющего напряжения на мостовые реверсивные преобразователи осуществляют совместно, т.е. импульсы управляющего напряжения подают и на выпрямительный и на инверторный мосты с согласованием моментов времени подачи их на соответствующие тиристоры. При этом импульсы управляющего напряжения соответствующих групп тиристоров трех реверсивных преобразователей должны быть сдвинуты на угол 2π/3 (См. Справочник по преобразовательной технике. Под редакцией И.М. Чиженко. Киев, Техника, 1978, с. 160 - 162).
Недостатком данного способа регулирования является незначительный диапазон регулирования скорости двигателя, верхний предел которого ограничен частотами вращения двигателя на уровне ω < 0,5ωн из-за возникновения бросков уравнительного тока при скачкообразном переводе вентилей из выпрямительного режима в инверторный и обратно вследствие неполной их управляемости. Поэтому для предотвращения резких изменений уравнительного тока углы управления вентилями изменяют относительно медленно, что и приводит к ограничению диапазона регулирования скорости.
В основу изобретения поставлена задача разработать такой способ регулирования скорости трехфазного асинхронного двигателя, который обеспечил бы расширение диапазона регулирования скорости путем создания дополнительных частот вращения магнитного поля двигателя в интервале 0,5ωн≤ω≤ωн за счет сокращения длительности существования заданных ориентаций магнитодвижущих сил (МДС) фазных обмоток двигателя.
Поставленная задача решается тем, что в известном способе регулирования скорости асинхронного двигателя, подключенного через три трехфазных мостовых реверсивных преобразователя к питающей сети, при котором изменяют частоту питающего напряжения, подаваемого на статорную обмотку двигателя, путем подачи импульсов управляющего напряжения на тиристоры трех реверсивных преобразователей, согласно изобретению, импульсы управляющего напряжения на три выпрямительных моста реверсивных преобразователей подают поочередно; сначала на тиристоры первого выпрямительного моста, затем через интервал времени, равный одной шестой части периода напряжения питающей сети, на тиристоры второго выпрямительного моста и через указанный интервал - на тиристоры третьего выпрямительного моста, после чего цикл подачи импульсов управляющего напряжения на выпрямительные мосты повторяют, и синхронно с подачей импульсов управляющего напряжения на тиристоры выпрямительных мостов подают импульсы управляющего напряжения одновременно на шесть тиристоров трех инверторных мостов реверсивных преобразователей, причем их подают на три тиристора анодных групп вентилей, и три тиристора катодных групп вентилей, присоединенных к другой фазной обмотке асинхронного двигателя, затем через интервал времени tинт = (Т/6)n, где T - период напряжения питающей сети, n - целое число в интервале от 1 до 10, прекращают подачу импульсов управляющего напряжения на три тиристора одной из групп вентилей инверторных мостов преобразователей, присоединенных к одной из фазных обмоток асинхронного двигателя, и одновременно с этим подают импульсы управляющего напряжения на три других тиристора той же группы вентилей, присоединенных к другой фазной обмотке асинхронного двигателя, после чего цикл подачи импульсов управляющего напряжения на инверторные мосты повторяют.
В заявляемом способе регулирования скорости трехфазного асинхронного двигателя поочередная подача импульсов управляющего напряжения на тиристоры каждого из трех выпрямительных мостов преобразователей через интервалы времени, равные одной шестой части периода напряжения питающей сети, и синхронная с ними подача импульсов управляющего напряжения одновременно на шесть тиристоров трех инверторных мостов реверсивных преобразователей, а именно на три тиристора анодных групп вентилей, присоединенных к одной фазной обмотке асинхронного двигателя, и три тиристора катодных групп вентилей, присоединенных к другой фазной обмотке, обеспечивают заданную ориентацию МДС обмоток асинхронного двигателя независимо от фазы напряжения питающей сети, а прекращение через интервал времени tинт = (Т/6)n, где T - период напряжения питающей сети, n - целое число в интервале от 1 до 10, подачи импульсов управляющего напряжения, на три тиристора одной из групп вентилей инверторных мостов преобразователей, присоединенных к одной из фазных обмоток асинхронного двигателя, и одновременная подача импульсов управляющего напряжения на три других тиристора той же группы вентилей, присоединенных к другой фазной обмотке асинхронного двигателя, позволяют получить частоты вращения магнитного поля в диапазоне ω = (0-1,0)ω1, где ω1 - основная частота вращения магнитного поля двигателя при питании от сетевого напряжения. Все это позволяет расширить диапазон регулирования скорости асинхронного двигателя. Кроме того, заявляемая последовательность выполнения операций способа позволяет уменьшить с 36 до 12 количество каналов формирования импульсов управляющего напряжения для тиристоров преобразователей; уменьшить установленную мощность оборудования реверсивных преобразователей за счет того, что нет необходимости в применении шести уравнительных дросселей, а также обеспечить возможность формирования таких электромагнитных процессов в асинхронном двигателе, при которых ток, потребляемый из сети, практически не меняется при изменении электромагнитного момента и частоты вращения, что позволяет осуществлять "мягкий" пуск асинхронного двигателя до рабочей скорости с токами статора в пределах I1 = (0.5 - 1.5)Iн в разомкнутой системе управления.
В процессе проведения патентно-информационных исследований выявлено, что отличительные признаки заявляемого способа, характеризующие новую последовательность выполнения операций и их режимы, в известных технических решениях не обнаружены.
На основании вышеизложенного можно сделать вывод, что заявляемый способ регулирования скорости асинхронного двигателя не следует явным образом из известного уровня техники, а следовательно, соответствует условию патентоспособности "изобретательский уровень".
Сущность изобретения поясняется чертежами, где:
на фиг. 1 приведена структурная схема устройства для реализации способа регулирования скорости асинхронного двигателя;
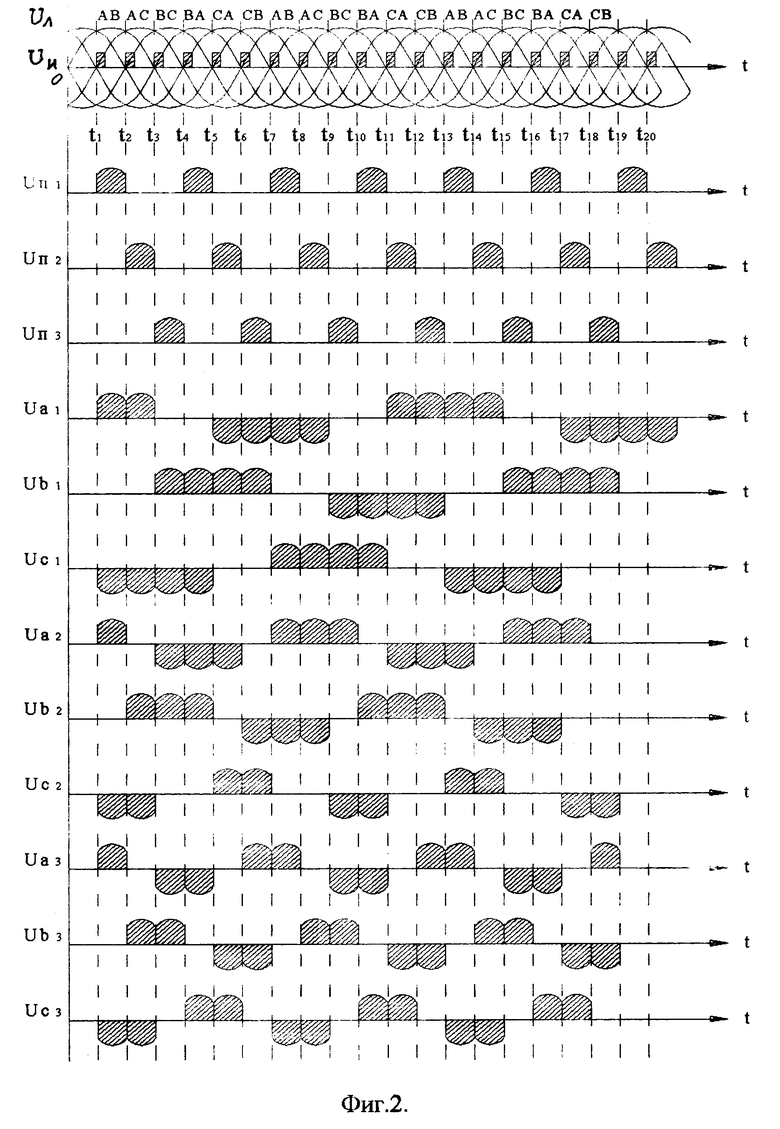
на фиг. 2 приведены временные диаграммы напряжений, поясняющие процесс формирования питающего напряжения различной частоты, например, 25 Гц, 37.5 Гц и 50 Гц;
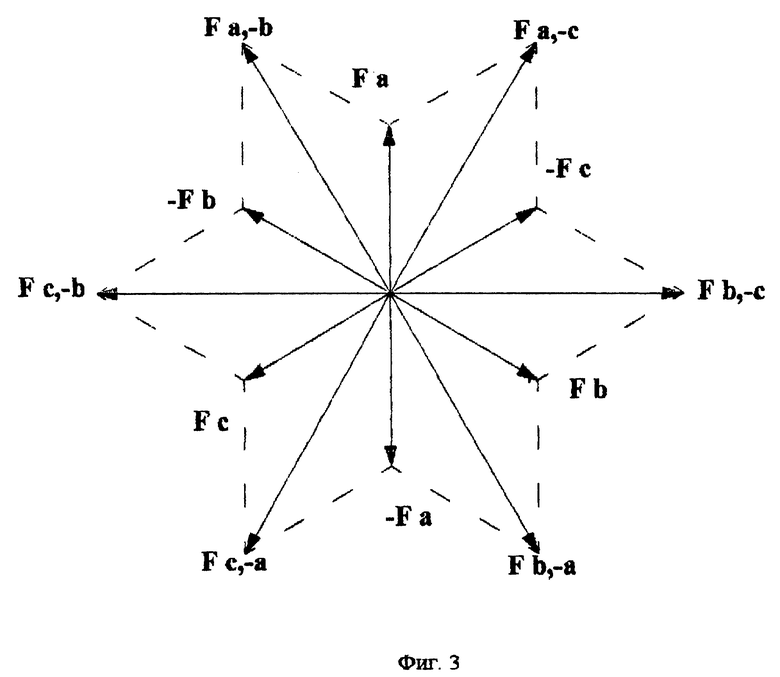
на фиг. 3 приведена диаграмма векторов МДС обмоток двигателя, поясняющая процесс формирования различных частот вращения магнитного поля двигателя.
Устройство для реализации заявляемого способа регулирования скорости асинхронного двигателя содержит три трехфазных мостовых реверсивных преобразователя 1, 2, 3 (фиг. 1), состоящие из выпрямительных 4, 5, 6 и инверторных 7, 8, 9 трехфазных тиристорных мостов. Тиристоры 10, 11, 12, 13, 14, 15 выпрямительного моста 4, тиристоры 16, 17, 18, 19, 20, 21 и 22, 23, 24, 25, 26, 27 соответственно выпрямительных мостов 5 и 6 присоединены к трехфазной (A, B, C) сети питающего напряжения, а тиристоры 28, 29, 30, 31, 32, 33 инверторного моста 7, тиристоры 34, 35, 36, 37, 38, 39 и 40, 41, 42, 43, 44, 45 соответственно инверторных мостов 8 и 9 присоединены к трехфазной обмотке a, b, c асинхронного двигателя 46. Кроме того, устройство для реализации заявляемого способа снабжено блоком управления 47 (фиг. 1), состоящим из стандартных узлов: узла задания напряжения управления 48, системы импульсно-фазового управления 49, коммутатора 50, блоков управляемых ключей 51, 52, 53, каждый из которых содержит шесть ключей управления тиристорами 10-27 соответственно выпрямительных мостов 4, 5, 6, распределителя импульсов 54, формирователя задания частоты вращения 55, циклического реверсивного синхронного счетчика 56 с модулем счета Kc = 6, дешифратора 57 и блока управляемых ключей 58, состоящего из шести ключей управления тиристорами 28 - 45 инверторных мостов 7, 8, 9. При этом выход узла задания напряжения управления 48 присоединен к входу системы импульсно-фазового управления 49 и входу формирователя задания частоты вращения 55, а выход системы импульсно-фазового управления соединен с входами коммутатора 50, распределителя импульсов 54 и блока управляемых ключей 58. Шесть выходов коммутатора 50 присоединены к входам шести ключей управления тиристорами каждого из трех блоков управляемых ключей 51, 52 и 53, а выходы последних соединены соответственно с управляющими электродами тиристоров 10-15 выпрямительного моста 4, тиристоров 16-21 выпрямительного моста 5 и тиристоров 22 - 27 выпрямительного моста 6. Каждый из трех выходов распределителя импульсов 54 присоединен к управляющему входу соответствующего блока управляемых ключей 51, 52 и 53. Выход формирователя задания частоты вращения 55 соединен с входом циклического реверсивного синхронного счетчика 56, три выхода которого присоединены к трем адресным входам дешифратора 57. Шесть выходов дешифратора 57 соединены с шестью управляющими входами шести ключей управления тиристорами блока управляемых ключей 58, каждый из которых присоединен к управляющим электродам трех тиристоров: по одному из каждого инверторного мостов 7, 8 и 9, принадлежащих к одной и той же группе (катодной или анодной) вентилей указанных мостов и присоединенных к одной и той же фазной обмотке асинхронного двигателя 46, а именно к управляющим электродам тиристоров 28, 34, 40; 29, 35, 41; и 30, 36, 42 анодных групп вентилей инверторных мостов 7, 8, 9 и управляющим электродам тиристоров 31, 37, 43; 32, 38, 44; и 33, 39, 45 катодных групп вентилей этих же мостов.
Способ регулирования скорости асинхронного двигателя осуществляется следующим образом.
При подаче в момент времени t=0 (фиг. 2) напряжения управления с выхода узла задания напряжения управления 48 (фиг. 1) на входы системы импульсно-фазового управления 49 и формирователя задания частоты вращения 55, на выходах эти узлы формируют последовательность импульсов напряжения. Причем на выходе системы импульсно-фазового управления 49 (фиг. 1) импульсы управляющего напряжения Uи (фиг. 2) следуют с заданным интервалом времени Т/6, где T - период напряжения питающей сети, а на выходе формирователя задания частоты вращения 55 импульсы управляющего напряжения следуют с заданным интервалом tинт = (Т/6)n, где n - целое число в интервале от 1 до 10. При угле управления тиристорами 10-27 выпрямительных мостов 4, 5 и 6, например, равном нулю, последовательность импульсов управляющего напряжения Uн на выходе системы импульсно-фазового управления 49 формируются в моменты времени t1, t2, t3... (фиг. 2) и импульсы подаются на входы коммутатора 50, распределителя импульсов 54 и на входы блока управляемых ключей 58. При этом в любой из указанных моментов времени на двух из шести выходов коммутатора 50 и на одном из трех выходов распределителя импульсов 54 появляются импульсы управляющего напряжения, которые подают на входы блоков управляемых ключей 51, 52 и 53. Причем в момент времени t1 импульсы подают на ключи управления тиристорами 10, 14; 16, 20 и 22, 26 соответственно выпрямительных мостов 4, 5 и 6, в момент времени t2 - на ключи управления тиристорами 10, 15; 16, 21 и 22, 27 тех же выпрямительных мостов, в момент времени t3 - на ключи управления тиристорами 11, 15; 17, 21 и 23, 27, в момент времени t4 - на ключи управления тиристорами 11, 13; 17, 19 и 23, 25, в момент времени t5 - на ключи управления тиристорами 12, 13; 18, 19 и 24, 25 и в момент времени t6 - на ключи управления тиристорами 12, 14; 18, 20 и 24, 26 соответственно выпрямительных мостов 4, 5 и 6. А так как порядок подачи импульсов на указанные тиристоры строго соответствует фазовому сдвигу сетевых линейных напряжений AB, AC, BC, BA, CA, CB... (фиг. 2), то цикл подачи импульсов управляющего напряжения на входы ключей 51, 52 и 53 управления тиристорами 10-27 периодически повторяют. Так как импульсы управляющего напряжения на трех выходах распределителя импульсов 54 появляются поочередно, то это приводит к появлению в момент времени t1 импульса управляющего напряжения на управляющем входе блока управляемых ключей 51, в момент времени t2 - импульса управляющего напряжения на управляющем входе блока управляемых ключей 52 и в момент времени t3 - импульса управляющего напряжения на управляющем входе блока управляемых ключей 53. После чего цикл подачи импульсов управляющего напряжения на управляющие входы блока управляемых ключей 51, 52, 53 снова повторяют. В момент времени t1 открываются ключи блока управляемых ключей 51, при этом импульсы управляющего напряжения, подаваемые в этот момент времени на ключи управления тиристорами 10, 14, передаются на управляющие электроды тиристоров 10, 14 выпрямительного моста 4, в момент времени t2 открываются ключи блока управляемых ключей 52, при этом импульсы управляющего напряжения передаются на управляющие электроды тиристоров 16, 21 выпрямительного моста 5 и в момент времени t3 открываются ключи блока управляемых ключей 53, при этом импульсы управляющего напряжения передаются на управляющие электроды тиристоров 23, 27 выпрямительного моста 6. Затем в момент времени t4 импульсы управляющего напряжения передаются на тиристоры 11, 13 выпрямительного моста 4, в момент времени t5 - на тиристоры 18, 19 выпрямительного моста 5 и в момент времени t6 - на тиристоры 24, 26 выпрямительного моста 6. После чего цикл подачи импульсов управляющего напряжения на тиристоры мостов 4, 5 и 6 повторяют.
Синхронно с подачей в вышеописанной последовательности импульсов на тиристоры 10-27 выпрямительных мостов 4, 5 и 6 производят подачу импульсов управляющего напряжения одновременно на шесть тиристоров инверторных мостов 7, 8 и 9, причем их подают на три тиристора анодных групп вентилей, присоединенных к одной фазной обмотке асинхронного двигателя и три тиристора катодных групп вентилей, присоединенных к другой фазной обмотке асинхронного двигателя. При этом в моменты времени t1, t2, t3... в открытое состояние переходят только два тиристора, один из анодной, другой из катодной групп вентилей инверторных мостов того реверсивного преобразователя, на выпрямительную группу которого подают в эти моменты времени импульсы управляющего напряжения. Таким образом, на интервалах времени t1-t2, t2-t3, t3-t4 ... поочередно открывают реверсивные преобразователи 1, 2, 3 и импульсы питающего напряжения Uп1, Uп2, Uп3 (фиг. 2) с интервалом времени T/6 подают на две фазные обмотки двигателя 46 (фиг. 1). При этом на интервале времени tинт = (T/6)n количество импульсов питающего напряжения Uп1, Uп2, Uп3, подаваемых на две заданные обмотки двигателя 46, равно числу n. В течение этого интервала времени сохраняется заданная ориентация МДС. Смена ориентаций вектора МДС на 60 градусов через каждый интервал времени tинт приводит к вращению вектора МДС, причем обеспечение дополнительного снижения длительности существования заданных ориентаций МДС приводит к созданию за счет этого дополнительных частот вращения магнитного поля и соответственно дополнительных частот вращения двигателя 46 в интервале 0,5ωн≤ω≤ωн. На временных диаграммах Uа1, Ub1, Uc1 (фиг. 2) показаны напряжения фаз "а", "b", "с" двигателя 46, сформированные из импульсов питающего напряжения Uп1, Uп2, Uп3 для n = 2, при этом создается частота напряжения f = 25 Гц и частота вращения поля двигателя, ω = 0,5ω1, где ω1 - предельная частота вращения магнитного поля двигателя при питании его непосредственно от сети. Это достигается следующим образом.
При подаче в момент времени t = 0 (фиг. 2) напряжения управления, соответствующего по уровню заданию частоты вращения 0,5ωн, с выхода узла задания напряжения управления 48 (фиг. 1) на вход формирователя частоты вращения 55 на его выходе появится последовательность импульсов управляющего напряжения с интервалом времени tинт = (T/6)n, где n = 2. При этом в течение двух интервалов времени T/6 на трех выходах циклического реверсивного синхронного счетчика 56 устанавливается и сохраняется состояние <001> в двоичном формате, которое является входной адресной последовательностью для дешифратора 57. Одновременно с этим на шести выходах дешифратора 57 устанавливается цифровой набор, например <000011>, подаваемый на управляющие входы блока управляемых ключей 58. При этом в моменты времени t1 и t2 в открытом состоянии будут два ключа, обеспечивающих передачу импульсов управляющего напряжения с выхода системы импульсно-фазового управления 49 одновременно на тиристоры 28, 34 и 40 анодных групп вентилей и тиристоры 33, 39, 45 катодных групп вентилей инверторных мостов 7, 8 и 9, присоединенных к фазным обмоткам "а" и "с" двигателя 46. В открытое состояние на интервале времени t1-t2 перейдут только два тиристора инверторного моста 7: тиристоры 28 и 33, так как в момент времени t1 импульсы управляющего напряжения подают только на тиристоры 10, 14 выпрямительного моста 4. Это приведет к подаче напряжения Uп1 реверсивного преобразователя 1 на фазные обмотки "а", "с", под действием которого появится ток в этих обмотках и установится ориентация вектора МДС двигателя в направлении Fa,-c (фиг. 3). При этом тиристоры 34, 39 и 40, 45 инверторных мостов 8 и 9 не будут открыты, так как в момент времени t1 импульсы управляющего напряжения на выпрямительные мосты 5 и 6 не подают.
В момент времени t2 в открытое состояние перейдут тиристоры 34, 39 инверторного моста 8, так как в этот момент времени импульсы управляющего напряжения подают на тиристоры 16, 21 выпрямительного моста 5. При этом на интервале времени t2-t3 на фазные обмотки "а" и "с" асинхронного двигателя 46 подают напряжение Uп2 реверсивного преобразователя 2, и ориентация вектора МДС в направлении Fa,-c (фиг. 3) сохраняется. Таким образом, на интервалах времени t1 - t2, t2 - t3 на фазы "а" и "с" двигателя 46 прикладывается напряжение Ua1 и Uc1.
По окончании первых двух интервалов t1-t2 и t2-t3, длительность каждого из которых равна одной шестой части периода напряжения питающей сети, на выходе формирователя частоты вращения 55 появится очередной импульс управляющего напряжения, что приведет к установке на трех выходах циклического реверсивного синхронного счетчика 56 состояния <011>. Одновременно с этим на шести выходах дешифратора 57 установится другой цифровой набор, например <000110>, подаваемый на управляющие входы блока управляющих ключей 58. При этом в моменты времени t3 и t4 в открытом состоянии будут два таких ключа блока 58 (фиг. 1), которые обеспечивают передачу импульсов управляющего напряжения на тиристоры 29, 35, 41 анодных групп вентилей и тиристоры 33, 39, 45 катодных групп вентилей инверторных мостов 7, 8 и 9. Это произойдет, потому что в момент времени t3 прекращают подачу импульсов управляющего напряжения на три тиристора 28, 34, 40 анодных групп вентилей инверторных мостов 7, 8 и 9, присоединенных к фазной обмотке "а" двигателя, и одновременно с этим подают импульсы управляющего напряжения на три других тиристора 29, 35 и 41 той же группы вентилей, присоединенных к другой фазной обмотке, а именно к фазе "b" двигателя 46. При этом в открытое состояние перейдут тиристоры 41 и 45 инверторного моста 9, так как в момент времени t3 импульсы управляющего напряжения с блока управляемых ключей 53 подают на тиристоры 23, 27 выпрямительного моста 6, согласно ранее описанной последовательности подачи импульсов управляющего напряжения на выпрямительные мосты 4, 5 и 6. В момент времени t4 в открытое состояние перейдут тиристоры 29 и 33 инверторного моста 7. Таким образом, на интервалах времени t3 - t4, t4 - t5 к фазам "b" и "с" асинхронного двигателя 46 подают импульсы питающих напряжений Uп3 и Uп1, соответственно реверсивных преобразователей 3 и 1. В течение этих интервалов времени вектор МДС двигателя 46 имеет ориентацию Fb,-c (фиг. 3). На каждом из последующих интервалах времени tинт = (T/6)2 переключения повторяют таким образом, что на интервалах времени t5-t6 и t6-t7 обеспечивают подачу импульсов питающего напряжения Uп2 и Uп3 на фазы "b" и "а" двигателя (фиг. 2). На этих интервалах времени поддерживается ориентация вектора МДС в направлении Fb,-c (фиг. 3). Затем на интервалах времени t7-t9, t9-t11, t11-t13 обеспечивают также переключения тиристоров 28 - 45 инверторных мостов 7 - 9, при которых на каждом из названных интервалов обеспечиваются ориентации векторов МДС Fc,-a, Fc,-b, Fa,-b (фиг. 3) соответственно. Период питающего напряжения на интервале времени t1-t13 (фиг. 2) имеет длительность 2Т, т.е. в двое больше периода сетевого напряжения. Далее с момента времени t13 цикл переключений повторяют для следующих периодов напряжения питания двигателя 46.
В заявляемом способе при длительности интервала времени tинт = (T/6)n, соответствующего другим значениям n в пределах от 1 до 10, порядок переключений тиристоров выпрямительных и инверторных мостов реверсивных преобразователей 1, 2, 3 осуществляют аналогично, что позволяет получить частоты вращения магнитного поля от 5 до 50 Гц. При n > 10 нарушается равномерность вращения ротора двигателя 46, поэтому число n ограничено максимальным значением n = 10.
Для получения ряда промежуточных частот вращения двигателя 46 в диапазоне 0.5 0,5ωн<ω<ωн в формируемом периоде питающего напряжения, число n с чередованием может принимать значения n = 2 и n = 1. Например, частота вращения магнитного поля ω = 0,75ω1 достигается при чередовании значения n по закону n = 2; 1; 1; 2; 1; 1; 2... . При этом питающие двигатель напряжения Ua2, Ub2 Uc2 имеют частоту 37,5 Гц (фиг. 2).
При длительности интервала времени tинт = T/6, что соответствует значению n = 1, достигается номинальная частота вращения двигателя, так как напряжение на двигателе при этом имеет частоту f=50 Гц.
Таким образом, заявляемый способ регулирования скорости трехфазного асинхронного двигателя обеспечивает получение ряда промежуточных частот вращения двигателя в интервале ω = (0-1,0)ωн путем создания дополнительных частот вращения магнитного поля двигателя в пределах 0,5ω1<ω<ω1, что позволяет вдвое расширить диапазон регулирования скорости.
Заявляемый способ может найти применение в электроприводах механизмов с вентиляторной нагрузкой средней и большой мощности, особенно работающих в условиях частичного снижения технологических нагрузок.
Заявляемый способ позволяет осуществить переход таких механизмов на пониженные частоты вращения, что способствует энерго,- ресурсосбережению. Кроме того, заявляемый способ регулирования скорости трехфазного асинхронного двигателя может использоваться для реализации "мягкого" пуска со снижением в 3-4 раза пусковых токов, что особенно важно для двигателей большой мощности.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ СКОРОСТИ ТРЕХФАЗНОГО ДВИГАТЕЛЯ ПЕРЕМЕННОГО ТОКА | 1999 |
|
RU2150781C1 |
| НЕПОСРЕДСТВЕННЫЙ ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ | 2001 |
|
RU2216092C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ СКОРОСТИ АСИНХРОННОГО ДВИГАТЕЛЯ | 1996 |
|
RU2095933C1 |
| АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С ФАЗНЫМ РОТОРОМ И СПОСОБ УПРАВЛЕНИЯ ИМ | 2005 |
|
RU2288535C1 |
| АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С ФАЗНЫМ РОТОРОМ | 2008 |
|
RU2371831C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2001 |
|
RU2192091C1 |
| Реверсивное полупроводниковое устройство регулирования скорости трехфазного асинхронного электродвигателя | 2015 |
|
RU2622394C1 |
| СТАБИЛИЗАТОР ТРЕХФАЗНОГО НАПРЯЖЕНИЯ С ОДНОФАЗНЫМ ЗВЕНОМ ВЫСОКОЙ ЧАСТОТЫ | 1996 |
|
RU2138112C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2000 |
|
RU2168842C1 |
| Вентильный преобразователь,ведомый сетью | 1979 |
|
SU1005252A1 |
Изобретение может быть использовано в асинхронных электроприводах механизмов, к которым предъявляются требования регулирования скорости в широких пределах. Технический результат заключается в расширении диапазона регулирования скорости асинхронного двигателя. Для этого изменяют частоту питающего напряжения на двигателе путем подачи импульсов управляющего напряжения на тиристоры трех реверсивных преобразователей. На выпрямительные мосты преобразователей импульсы подаются поочередно: сначала на тиристоры первого выпрямительного моста, затем через интервал времени, равный одной шестой периода напряжения сети на тиристоры второго моста и аналогично на тиристоры третьего моста. Затем цикл повторяют. Синхронно с этим подают импульсы управляющего напряжения одновременно на шесть тиристоров трех инверторных мостов реверсивных преобразователей: на три тиристора анодных групп вентилей, присоединенных к одной фазной обмотке двигателя, и три тиристора катодных групп двигателей, присоединенных к другой фазной обмотке двигателя. Затем через указанный интервал времени прекращают подачу импульсов на тиристоры одной из групп вентилей инверторных мостов и одновременно подают их на другие тиристоры той же группы вентилей, присоединенных к другой обмотке двигателя. После чего цикл повторяют. 3 ил.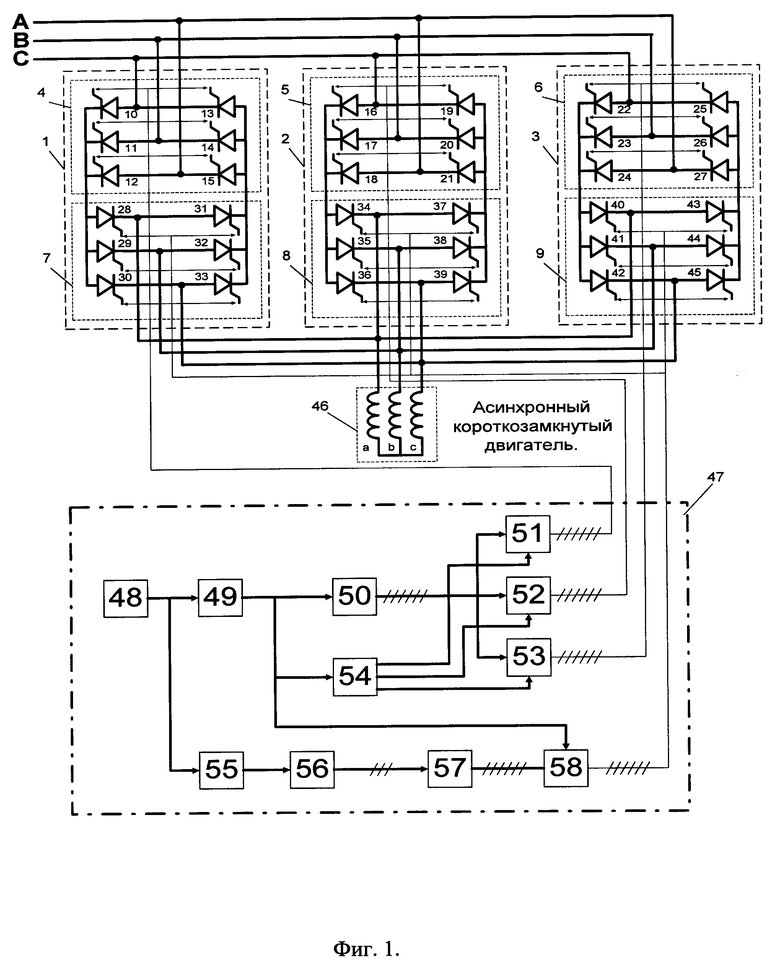
Способ регулирования скорости асинхронного двигателя, подключенного через три трехфазных мостовых реверсивных преобразователя к питающей сети, при котором изменяют частоту питающего напряжения, подаваемого на статорную обмотку двигателя, путем подачи импульсов управляющего напряжения на тиристоры трех реверсивных преобразователей, отличающийся тем, что импульсы управляющего напряжения на три выпрямительных моста реверсивных преобразователей подают поочередно: сначала на тиристоры первого выпрямительного моста, затем через интервал времени, равный одной шестой части периода напряжения питающей сети на тиристоры второго выпрямительного моста и через указанный интервал на тиристоры третьего выпрямительного моста, после чего цикл поочередной подачи импульсов управляющего напряжения на выпрямительные мосты повторяют, синхронно с подачей импульсов на тиристоры выпрямительных мостов подают импульсы управляющего напряжения одновременно на шесть тиристоров трех инверторных мостов реверсивных преобразователей, причем их подают на три тиристора анодных групп вентилей, присоединенных к одной фазной обмотке асинхронного двигателя, и три тиристора катодных групп вентилей, присоединенных к другой фазной обмотке асинхронного двигателя, затем через интервал времени tинт = (T1/6)n, где T - период напряжения питающей сети, n - целое число в интервале от 1 до 10, прекращают подачу импульсов управляющего напряжения на три тиристора одной из групп вентилей инверторных мостов преобразователей, присоединенных к одной из фазных обмоток асинхронного двигателя, и одновременно с этим подают импульсы управляющего напряжения на три других тиристора той же группы вентилей, присоединенных к другой обмотке асинхронного двигателя, после чего цикл подачи импульсов управляющего напряжения на инверторные мосты повторяют.
| Справочник по преобразовательной технике | |||
| /Под ред | |||
| И.М | |||
| ЧИЖЕНКО | |||
| - Киев: Техника, 1978, с.160-162 | |||
| Электропривод переменного тока | 1987 |
|
SU1561184A1 |
| Способ управления комбинированным частотно-параметрическим асинхронным электроприводом и устройство для его осуществления | 1987 |
|
SU1541751A1 |
| Устройство для частотного управления асинхронным двигателем | 1987 |
|
SU1443114A1 |
| US 4132931 A, 02.01.1979 | |||
| US 4760321 A, 26.07.1988 | |||
| Шарнирное соединение для крепления пальца | 1983 |
|
SU1170203A1 |

